基于雙十表光學捷聯慣組的主從冗余方法及信息重構技術
2023-11-06 09:03:06柴嘉薪施國興
導彈與航天運載技術 2023年4期
柴嘉薪,王 聰,施國興,王 輝
(北京航天自動控制研究所,北京,100854)
0 引 言
在運載火箭執行任務過程中,慣性器件作為控制系統的關鍵單機,可能因自身質量問題或受到外部環境的影響發生故障,直接影響任務成敗。
提升慣組的可靠性,可從提升單一元部件的可靠性入手,但受生產工藝水平等因素限制,此項研究投入大、周期長、見效慢,提升空間有限[1],且無法完全避免未知的外部環境因素對慣性器件性能造成的不良影響。傳統的運載火箭設計中通常采用慣組冗余技術,以大幅度提高運載火箭控制系統的可靠性[2]。
對于重大工程任務,須遵循“一度故障正常飛行,二度故障保證安全”的設計原則,中國工程實踐中現有可滿足此項原則的方案僅有雙七表撓性慣組冗余方案[3]。隨著光學陀螺技術的發展,成熟度逐步提高,光學陀螺因其測量精度高、靈敏度高、動態范圍大、體積小、重量輕、易于集成的優點,已成為航天應用的主流,目前航天主流運載火箭除中國的載人運載火箭外,均無機械陀螺構成的慣組,已全部更新換代為光學陀螺慣組[4-5],因此不再考慮沿用此成熟方案。
十表光學慣組可組成成本較低、節約空間、質量較輕且冗余度更高的慣組冗余配置。現已有成熟的單十表光學慣組冗余方案[6]經過了多型運載火箭飛行試驗驗證,該方案可實現慣組在一度故障下正常工作,但會損失一定的導航精度,對于重型運載火箭的長時間飛行任務,無法保證一度故障下的高精度入軌。部分文獻中研究了斜置表與正交軸相對角度的最優化配置設計,以提高單十表慣組配置下斜表導航的精度[7-8]。但受方案冗余度和斜置表性能的限制,單十表光學慣組冗余方案仍有較大局限性。
針對以上問題,本文研究了一種基于雙十表光學捷聯慣組的主從冗余方法及信息重構技術。依據在主/從單套慣組內分別對五表陀螺儀和五表加速度計進行故障診斷和進一步通過主從慣組之間一致性判別策略實現故障定位的結果,完成異常表的故障計數和故障表信息的隔離。通過冗余信息重構技術,重型運載火箭在長時間飛行過程中,慣組的同類表發生三度以下故障后,控制系統仍能通過系統級冗余得到可靠有效的慣性導航信息。
1 基于雙十表光學捷聯慣組的主從冗余方法
1.1 雙十表光學捷聯慣組的組成
雙十表光學捷聯慣組配置了雙五表陀螺儀和雙五表加速度計,其組成如圖1 所示。在箭體坐標系OX1Y1Z1下,定義Ax、Ay、Az為3個正交安裝的石英加速度計;AS和AT為兩個斜置安裝的石英加速度計;GX、GY、GZ為3個正交安裝的光學陀螺儀,GS和GT為兩個斜置安裝的光學陀螺儀,圖中箭頭指向即為對應表的敏感軸向。兩套慣組中斜表軸向與正交軸之間的定向夾角一致,其中OS軸與三正交軸之間的夾角分別為αS、βS、γS,OT軸與三正交軸之間的夾角分別為αT、βT、γT。
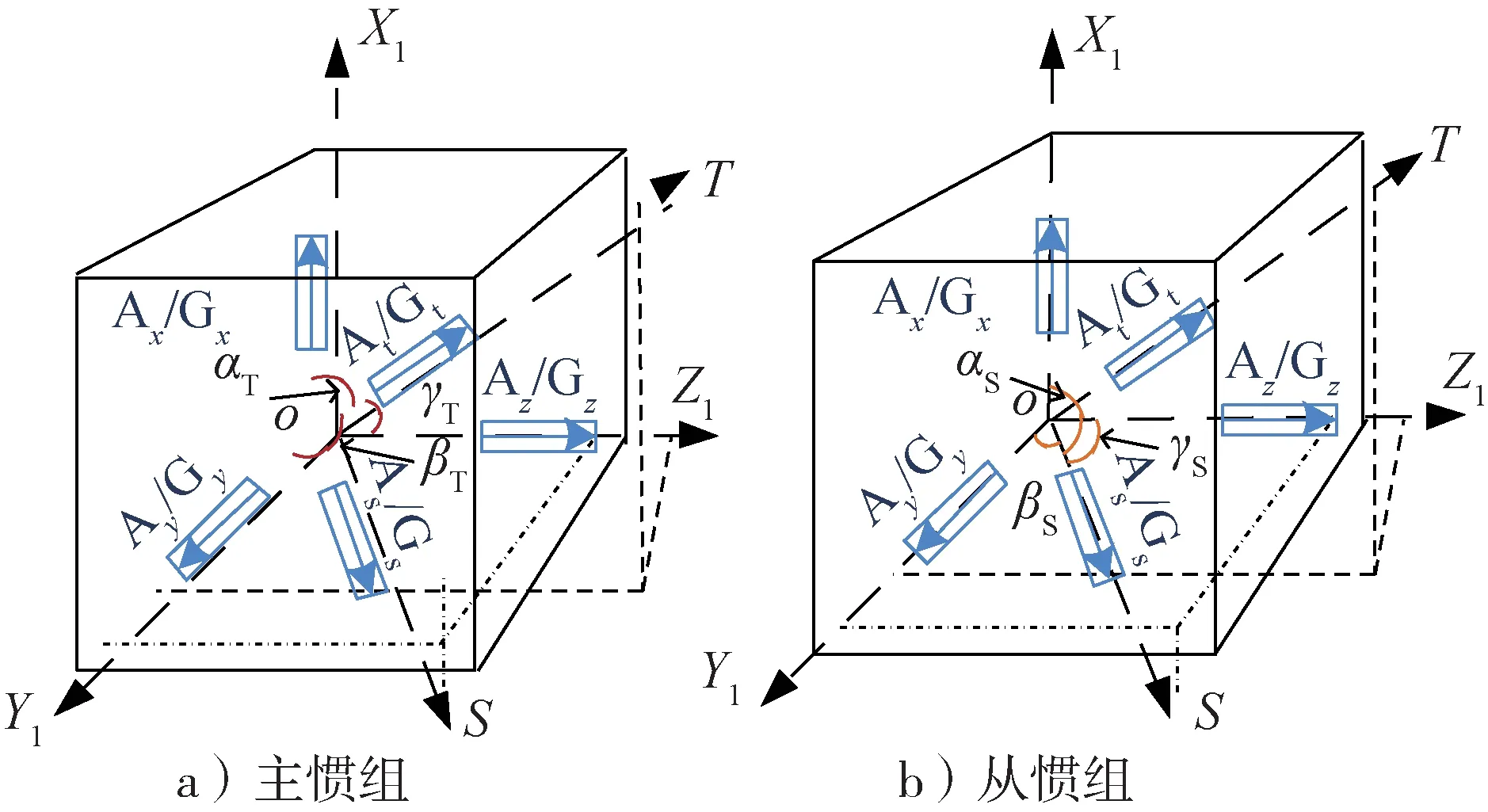
圖1 雙十表光學捷聯慣組的組成及安裝定向示意Fig.1 Composition and installation orientation of double tensensor optical strapdown inertial unit
在不考慮兩套慣組之間的安裝誤差及擺放不水平度差異的理想情況下,主慣組與從慣組對應軸向陀螺儀/加速度計的測量信息是一致的。除了主從慣組之間的測量信息比對外,每套慣組同類表中兩個斜置表與3 個正交表輸出的測量增量值另有投影關系如下(此處以陀螺儀輸出為例,加速度計輸出同理):
式 中δθαi為 各 軸 陀 螺 儀 輸 出 的 角 速 度,α=x、y、z、s、t;Esi_x,Esi_y,Esi_z分別為GS表在各正交軸的投影系數;Eti_x、Eti_y、Eti_z分別為GT表在各正交軸的投影系數;i= 1、2,分別為主慣組和從慣組。
1.2 冗余信息處理方案
雙十表光學慣組冗余信息處理采用主從冗余方案。首先,在主慣組和從慣組內分別進行單套慣組內五表陀螺儀/五表加速度計的故障診斷與故障隔離。對于單套慣組內出現同類表二度及二度以上一致性故障的情況,再進行主從慣組之間的一致性故障檢測,以判定故障慣組各正交表是否損壞。利用隔離故障表后的冗余測量信息進行冗余信息重構與導航計算,分別通過主、從慣組五表陀螺儀/五表加速度計測量信息得到角增量信息和視速度增量信息。最終根據故障定位結果和冗余信息使用真值表,從主慣組或從慣組中擇優選取角增量/視速度增量信息用于導航控制。
慣性器件的故障模式多且機理復雜,但從慣組冗余信息使用的角度來說,主要關注慣性器件的輸出特性是否正常,雙十表慣組冗余信息處理流程見圖2。
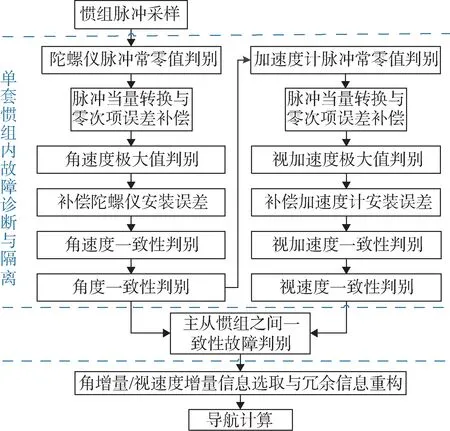
圖2 雙十表光學慣組冗余信息處理流程Fig.2 Redundant information processing flow of double tensensor optical strapdown inertial unit
單套慣組內故障診斷措施主要包括陀螺儀/加速度計脈沖常零值輸出判別、角速度/視加速度極大值判別、視加速度/角速度/角度一致性判別。其中,常零值輸出判別與極大值判別的方法簡單、明確且成熟,可直接沿用現有方法[9],但需根據任務特點和慣性器件技術指標謹慎設計故障判別和故障隔離的門限。
針對陀螺儀測量信息和加速度計測量信息的非零值故障和非極大值故障,采用正交軸與斜表在正交軸投影共判、短周期與長周期相結合的方式,將一度故障直接定位到故障單表或診斷出二度故障,并根據故障判別和定位結果分情況進行后續的故障隔離和冗余信息使用。
2 單套慣組內一致性故障判別方法
以陀螺儀輸出信息為例,介紹一種雙五表配置下的一致性故障判別方法。
2.1 一致性判別方程
針對單套慣組內同類表的一致性故障判別,以陀螺儀輸出的角速度信息為例,建立如下一致性判別方程:
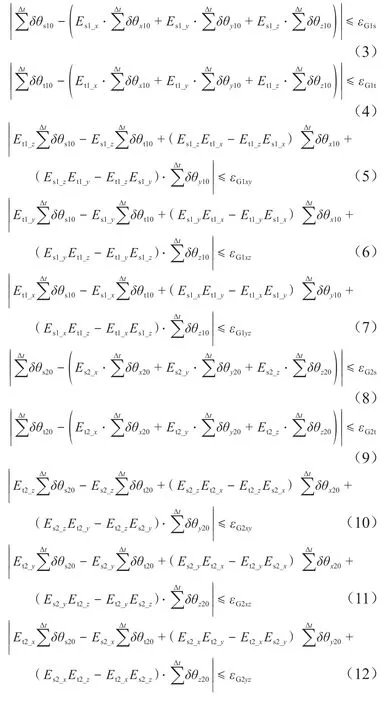
式中δθαi0為陀螺儀輸出的角速度;εGiα為故障門限值;α=x、y、z、s、t;i= 1、2,分別為主慣組和從慣組;Δt為滾動累加周期,為降低高頻干擾信號對故障判別的影響,對角速度一致性判別進行滾動累加,本文取滾動累加周期Δt為控制周期的25倍。
2.2 各單套慣組內五表陀螺儀一致性故障判別
在單套慣組內,利用建立的一致性判別方程,對五表陀螺儀分別進行故障表一致性檢測,并執行故障表隔離操作。分別判斷主慣組和從慣組內是否存在五表陀螺儀出現一度故障或二度故障的情況。主、從慣表故障定位見表1、表2。
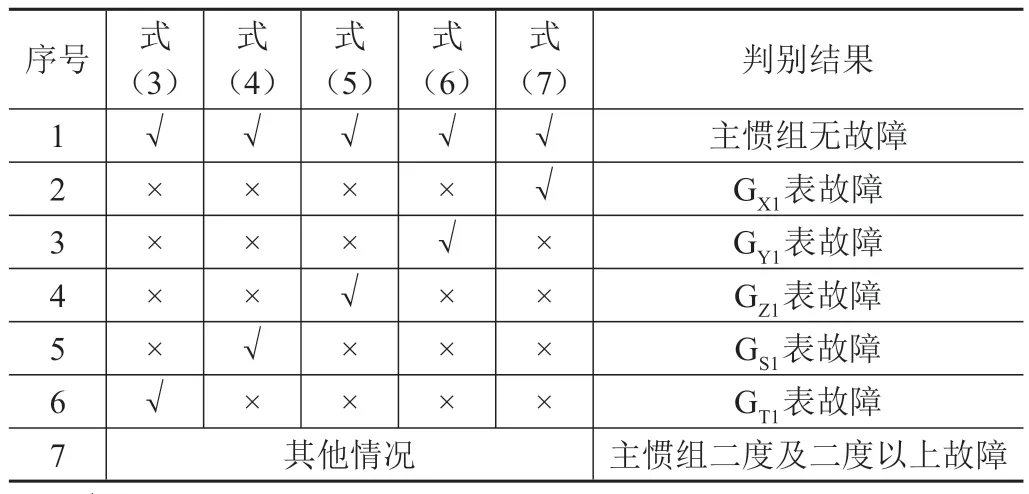
表1 主慣組五表陀螺儀輸出信息一致性故障定位Tab.1 Consistency fault location of gyroscope output information from main strapdown inertial unit
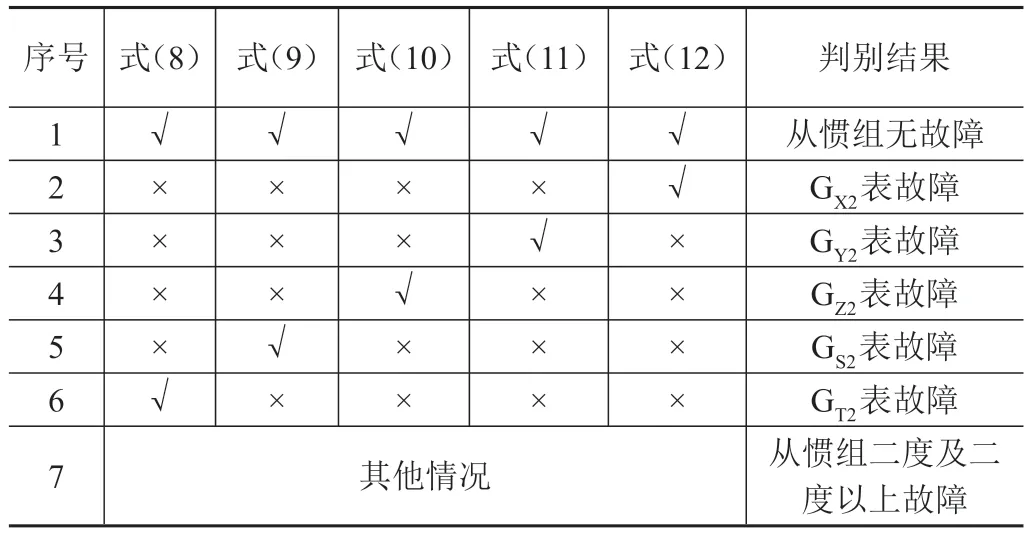
表2 從慣組五表陀螺儀輸出信息一致故障定位Tab.2 Consistency fault location of gyroscope output information from slave strapdown inertial unit
設單套慣組的一致性故障標志字N主/N從,用以表示單套慣組內部一致性故障判別的結果:
結合表1 和表2 單套慣組內五表陀螺儀輸出信息一致性故障的定位結果,可得到主、從慣組的故障標志字見表3。

表3 單套慣組內一致性故障判別結果Tab.3 Consistent fault discrimination results in a single strapdown inertial unit
2.3 各單套慣組內五表加速度計一致性故障判別
單套慣組內五表加速度計一致性故障判別方法與五表陀螺儀類似,不同之處在于,對五表陀螺儀的一致性故障判別采用了短周期累加和長周期累加相結合的方式。但對于五表加速度計一致性故障的判別,考慮到在飛行狀態下火箭軸向過載與橫法向過載差異很大,軸向過載在橫法向投影,不同慣組之間的安裝誤差會導致橫法向表輸出有差異,長時間累計下來對單表輸出影響很大。若隨之放大故障判別門限將使判別失去意義,因此五表加速度計采用短周期累加和中等周期累加相結合的一致性故障判別方式。
3 主從慣組之間一致性故障判別
針對第2 節中通過式(3)~(12)判斷出主慣組和從慣組中有一個慣組出現同類表二度故障,且另一套慣組無故障的情況,需要進一步通過主從慣組之間一致性故障判別確定發生一度以上的慣組的正交表是否出現故障。
3.1 一致性判別方程
針對主從慣組之間的一致性故障判別,以陀螺儀輸出的角速度信息為例,建立如下一致性判別方程:
式中δθαi0為陀螺儀輸出的角速度;εGiα為故障門限值;α=x,y,z,s,t;i= 1、2,分別為主慣組和從慣組;Δt為滾動累加周期。
3.2 雙五表陀螺儀一致性故障判別
針對第2.2 節中判斷出主慣組和從慣組中有一個慣組出現同類表二度故障,且另一套慣組無故障的情況,利用式(14)~(16)進一步判別出現二度及二度以上故障的慣組中3個正交表是否為故障表,診斷結果用于后續的冗余信息重構。
針對第2.2 節中判斷出一套慣組為二度及二度以上故障,另一套慣組為一度故障或二度及二度以上故障的情況,屬于系統三度或三度以上故障,考慮控制系統的工程需求與復雜性,不再針對此類情況作進一步故障表判別處理。
同類表二度及二度以上慣組正交表故障判別真值見表4。
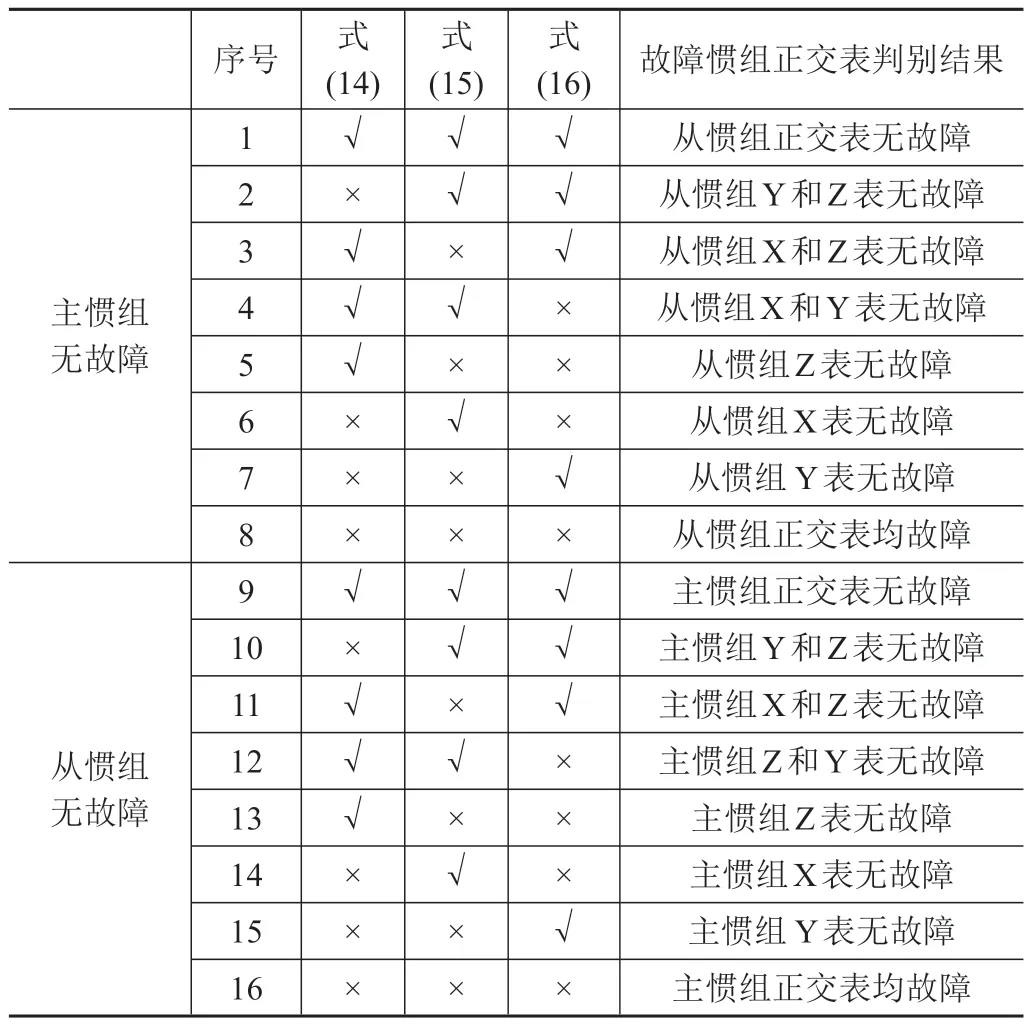
表4 故障慣組中正交表故障判別Tab.4 Fault discrimination of orthogonal axis sensors in fault strapdown inertial unit
根據表4單套慣組之間正交表故障判別結果,得到主、從慣組故障標志字見表5。
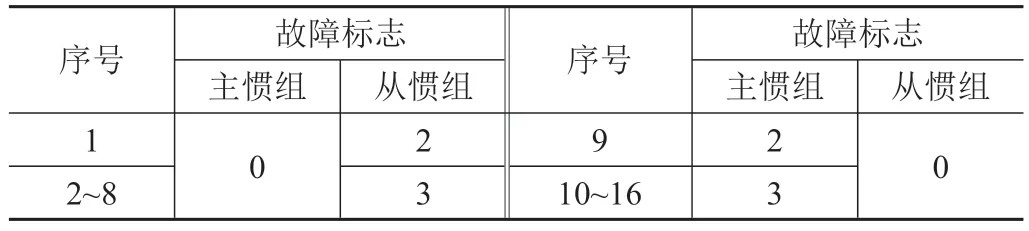
表5 兩套捷聯慣組之間一致性故障判別結果Tab.5 Consistent fault discrimination results between two strapdown inertial units
3.3 雙五表加速度計一致性故障判別
與雙五表陀螺儀類似,雙五表加速度計經過故障判別與故障隔離,在主慣組和從慣組內分別利用各自的無故障三正交加速度計測量信息或冗余信息重構結果進行導航解算得到視速度增量,待系統進行冗余信息的選用。
4 冗余信息重構
4.1 冗余信息重構流程
通過冗余信息故障診斷,得到當前五表陀螺儀/加速度計輸出的測量信息的健康狀態,基于此,開展單慣組內同類表冗余信息的重構與導航解算。具體流程如圖3所示。
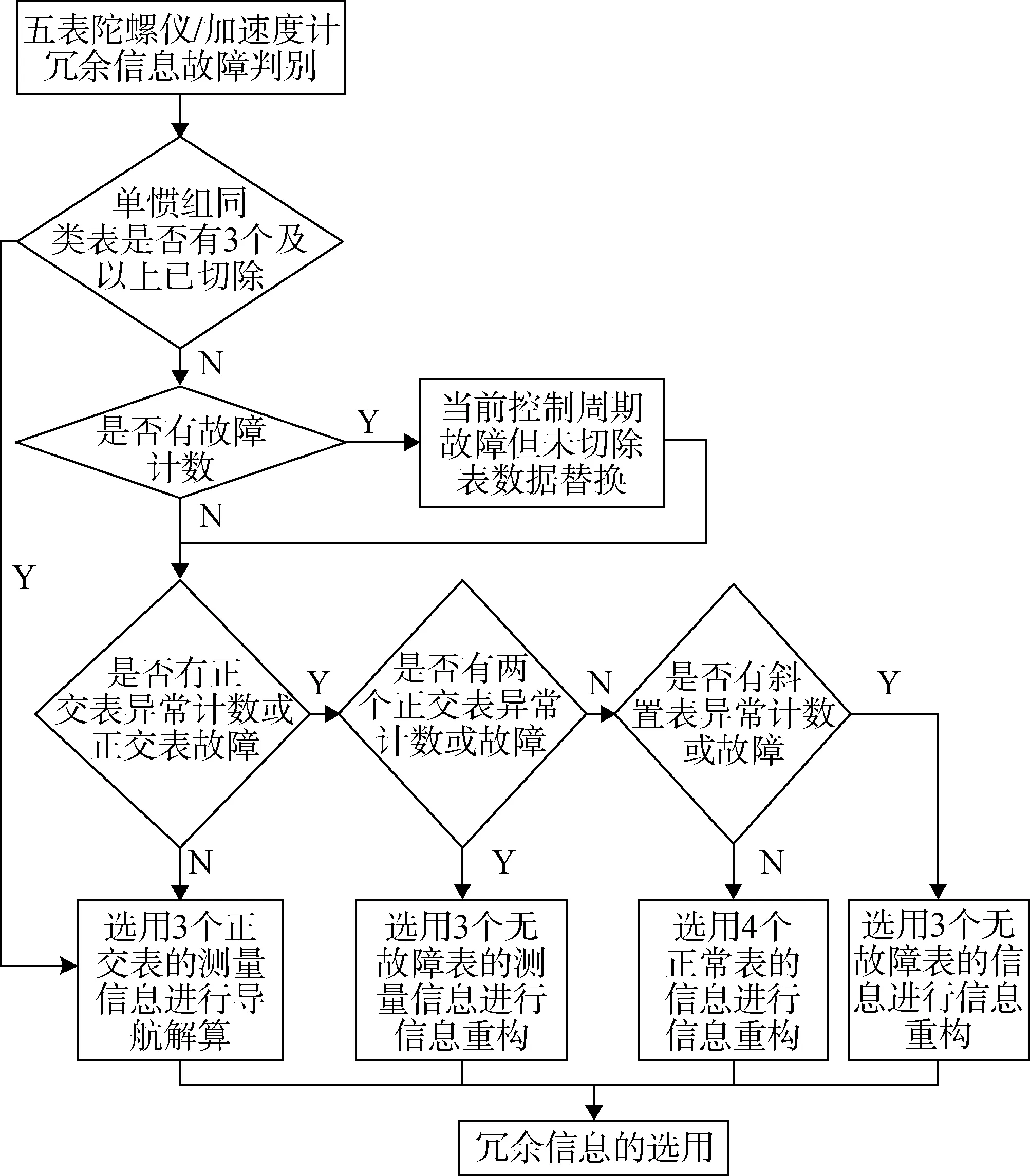
圖3 冗余信息重構流程Fig.3 Redundant information reconstruction process
如圖3所示,對于在當前控制周期內未達到三度故障切除的五表陀螺儀/加速度計,依次進行是否有故障計數、是否有正交表異常計數或正交表故障、是否有兩個正交表異常計數或故障、是否有斜置表異常計數或故障等判斷。針對各步驟判斷結果,依據冗余信息重構流程,利用相應的測量信息進行導航解算或信息重構。
慣組選型時,受成本控制、安裝空間和總質量要求等方面的約束,通常配置在正交軸方向上的陀螺儀和加速度計比斜置軸方向上的精度高,為了實現更高的導航制導精度,在故障狀態下系統重構時,優先選用無故障的正交表提供的測量信息進行導航計算。
隔離故障慣性儀表并完成冗余信息重構后,系統的故障適應能力明顯提高,可以應對二度及二度以上的同類單表故障。
4.2 十表慣組正交軸慣性儀表故障下的信息重構
當五表陀螺儀/加速度計的正交軸出現故障時,通過信息重構可由其他斜置軸的冗余信息準確估計出故障正交軸向的導航信息,具體方法如下:
五表配置下的陀螺儀/加速度計的輸出方程為[10]
式中Z∈R5為五軸向慣性儀表的測量信息;ω∈R3為系統三正交軸的角增量/視速度增量信息;H為慣組的測量矩陣;ε為均值為零的高斯白噪聲。
將兩斜置軸OS和OT分別投影在XOZ平面上,得到斜置軸投影線OS'和OT',如圖4 所示,αS、αT分別為從OX1軸順時針旋轉至OS和OT軸的角度,βS'、βT'分別為從OY1軸逆時針轉至OS'和OT'軸的角度。
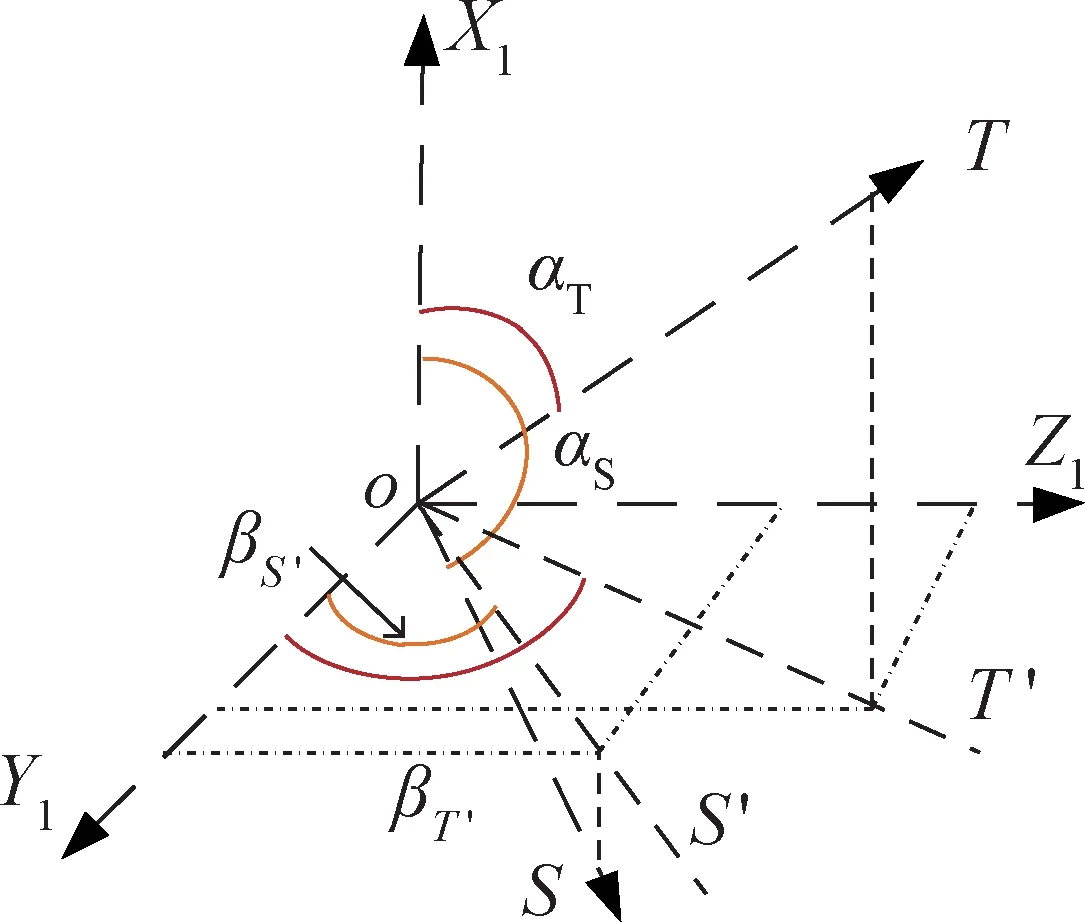
圖4 十表光學慣組斜置軸投影示意Fig.4 Schematic of oblique axis projection in ten-sensor optical strap down inertial unit
假設陀螺儀在五表配置下,經故障檢測到安裝Y軸的陀螺儀GY發生故障,其輸出信息被系統進行故障隔離,需要使用其他無故障陀螺儀進行信息重構。
a)使用無故障表GX、GZ、GS進行信息重構。
由此,得到:
在當前假設條件下,wx=ZGX,wz=ZGZ,可以進一步得到GY的正確輸出為
b)使用無故障表GX、GZ、GT進行信息重構。可得到:
在當前假設條件下,wx=ZGX,wz=ZGZ,可以進一步得到GY的正確輸出為:
c)使用無故障表GX、GS、GT進行信息重構。可得到:
求解可得到:
d)使用無故障表GZ、GS、GT進行信息重構。可得到:
求解可得到:
4.3 冗余信息的選用
基于第2.2節和第2.3節中以陀螺儀為例的各單套慣組內部同類表一致性故障判別和兩慣組之間一致性故障判別和定位結果,隔離慣組中故障陀螺儀/加速度計的測量輸出信息。再利用冗余信息重構技術分別得到由兩慣組測量輸出導航解算得到的角增量/視速度增量。最后,遵從優先使用主慣組信息以及盡量選用無故障的正交表慣組測量信息進行導航計算這兩項原則,完成冗余信息的選用,依據冗余信息使用真值表確定用于導航控制的角增量/視速度增量信息,使得在慣組發生故障的情況下,火箭經過長時間飛行后仍能盡可能減少精度損失,確保在本文提出的慣組冗余方案冗余度可覆蓋的故障模式下實現精確入軌。冗余信息使用真值見表6。
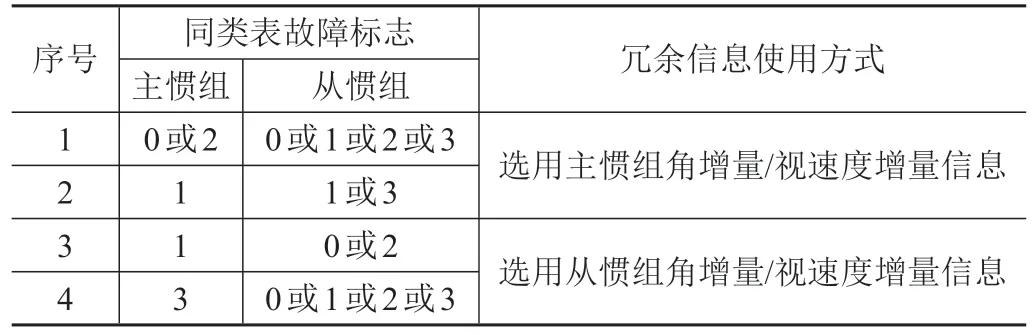
表6 冗余信息使用真值Tab.6 Truth for redundant information
5 結 論
本文針對重型運載火箭的任務特點及可靠性需求,提出了一種基于雙十表光學捷聯慣組的主從冗余方法與信息重構技術。首先,給出了冗余信息處理方案,并設計了雙五表陀螺儀/雙五表加速度計一致性故障診斷算法。再基于故障診斷結果,設計了冗余信息重構流程以及十表慣組正交軸慣性儀表故障下的信息重構算法。最后,遵從優先使用主慣組信息以及盡量選用無故障的正交表慣組測量信息進行導航計算這兩項原則,完成冗余信息的選用。
本文提出的技術方法實現了在雙十表光學慣組配置下最大限度地對故障進行檢出與隔離,滿足長時間飛行任務中,在慣組三度以下同類表故障的情況下,控制系統仍可靠工作的需求,并確保運載火箭完成發射任務。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
燕山大學學報(2015年4期)2015-12-25 02:19:49
