一種接收信號(hào)強(qiáng)度的室內(nèi)定位穩(wěn)健估計(jì)方法
2023-11-02 11:47:12馮陽杜順季葉錦鋒
城市勘測 2023年5期
馮陽,杜順季,葉錦鋒
(廣州市城市規(guī)劃勘測設(shè)計(jì)研究院,廣東 廣州 510060)
0 引 言
隨著工業(yè)4.0的推進(jìn),越來越多的智能化設(shè)備出現(xiàn)在室內(nèi)場景中,這些室內(nèi)智能設(shè)備的工作都依賴對自身位置的感知,離不開室內(nèi)定位技術(shù)的支持。傳統(tǒng)的室外定位技術(shù)GNSS、手機(jī)基站定位等受建筑物遮擋、室內(nèi)環(huán)境復(fù)雜等因素的影響,已經(jīng)不能滿足人們室內(nèi)定位需求,因此室內(nèi)定位技術(shù)已經(jīng)成為當(dāng)前測繪領(lǐng)域的重要研究方向。
目前應(yīng)用于室內(nèi)定位的技術(shù)主要包括紅外、藍(lán)牙、WiFi、ZigBee、射頻識(shí)別(RFID)和超寬帶(UWB)等,其中藍(lán)牙、WiFi、zigBee是基于接收信號(hào)強(qiáng)度進(jìn)行定位[1,2]。紅外線室內(nèi)定位技術(shù)的原理是紅外線標(biāo)識(shí)發(fā)射調(diào)制的紅外射線[3],通過安裝在室內(nèi)的光學(xué)傳感器接收進(jìn)行定位;藍(lán)牙技術(shù)則是通過測量信號(hào)強(qiáng)度來設(shè)置定位的,是一種能量消耗慢,應(yīng)用與近距離環(huán)境下的無線傳輸技術(shù)[4,5];WiFi室內(nèi)定位技術(shù)[6]采用在區(qū)域內(nèi)安置無線基站,根據(jù)待定位WiFi設(shè)備的信號(hào)特征,結(jié)合無線基站的拓?fù)浣Y(jié)構(gòu),綜合確定節(jié)點(diǎn)位置;ZigBee室內(nèi)定位技術(shù)[7],通過若干待測節(jié)點(diǎn)和參考節(jié)點(diǎn)與網(wǎng)關(guān)之間形成組網(wǎng),利用網(wǎng)絡(luò)相互通信進(jìn)行位置定位;射頻識(shí)別(RFID)室內(nèi)定位技術(shù)[8,9]利用電磁感應(yīng)原理,通過無線激發(fā)近距離無線標(biāo)簽,實(shí)現(xiàn)信息讀取;UWB技術(shù)通過發(fā)送和接收納秒級及以下的極窄脈沖傳播數(shù)據(jù),從而具有GHz量級的帶寬,脈沖信號(hào)具有穿透能力強(qiáng)、抗多徑等優(yōu)點(diǎn)[10]。
本文介紹了基于測距的常用無線定位方法,詳細(xì)分析基于接收信號(hào)強(qiáng)度(Radio Signal Strength Indicator,RSSI)的測距模型[11,12],提出一種接收信號(hào)強(qiáng)度的室內(nèi)定位穩(wěn)健估計(jì)方法,并通過實(shí)驗(yàn)對模型參數(shù)進(jìn)行求解,分別采用最小二乘方法和本文方法進(jìn)行室內(nèi)位置解算,并對定位精度進(jìn)行對比分析。
1 幾種基于測距的室內(nèi)定位方法介紹
目前室內(nèi)定位的方法有基于測距的無線定位和非測距的無線定位,非測距的無線定位算法主要有:質(zhì)心算法、凸規(guī)劃定位算法等。基于測距的無線定位精度相對較高,主要方法有到達(dá)時(shí)間法(Time Of Arrival,TOA)、到達(dá)時(shí)間差法(Time Difference Of Arrival,TDOA)、到達(dá)角度法(Angle Of Arrival,AOA)以及接收信號(hào)強(qiáng)度法等[13]。
1.1 到達(dá)時(shí)間法
到達(dá)時(shí)間法(TOA)通過測量信號(hào)的傳播時(shí)間實(shí)現(xiàn)測距,利用信號(hào)在節(jié)點(diǎn)間的傳播時(shí)間乘以信號(hào)傳播速度求取節(jié)點(diǎn)間的距離。TOA測距分為單向測距和雙向測距兩種模式,單向測距模式發(fā)射器和接收器需保持嚴(yán)格的時(shí)間同步,根據(jù)信號(hào)發(fā)射時(shí)刻和接收時(shí)刻確定信號(hào)傳播時(shí)間,如圖1(a)所示。雙向測距模式通過在發(fā)射器處計(jì)算發(fā)射器發(fā)射和接收器返回信號(hào)的時(shí)間差,從而計(jì)算距離,無須發(fā)射器和接收器之間保持時(shí)間同步,如圖1(b)所示。通過計(jì)算信號(hào)在參考節(jié)點(diǎn)和標(biāo)簽之間的距離,利用三邊定位算法求解未知節(jié)點(diǎn)的坐標(biāo),從而實(shí)現(xiàn)室內(nèi)定位,如圖1(c)所示。
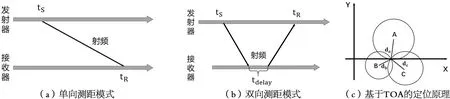
圖1 到達(dá)時(shí)間法定位
1.2 到達(dá)時(shí)間差法
到達(dá)時(shí)間差法(TDOA)與到達(dá)時(shí)間法(TOA)相比,降低了對時(shí)間同步的要求。TDOA是通過檢測未知節(jié)點(diǎn)信號(hào)到達(dá)兩個(gè)參考節(jié)點(diǎn)的時(shí)間差,根據(jù)幾何原理,未知節(jié)點(diǎn)在以兩個(gè)參考節(jié)點(diǎn)為焦點(diǎn)、所測得的距離差為長軸的雙曲線上,由三對及以上雙曲線相交求取交點(diǎn)即未知節(jié)點(diǎn)的位置,基于到達(dá)時(shí)間差法定位原理如圖2所示。
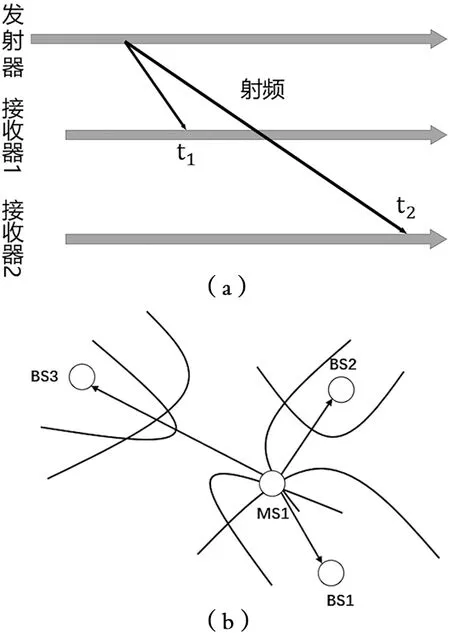
圖2 到達(dá)時(shí)間差法定位
1.3 到達(dá)角度法
到達(dá)角度法(AOA)定位利用測量信號(hào)到達(dá)角度的原理,通過參考節(jié)點(diǎn)處的天線陣列測量未知節(jié)點(diǎn)發(fā)射信號(hào)的角度信息,由三角測量方法獲得未知節(jié)點(diǎn)的位置估計(jì)。基于到達(dá)角度法定位原理如圖3所示。
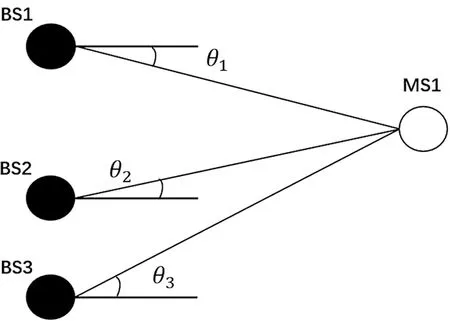
圖3 到達(dá)角度法定位
1.4 接收信號(hào)強(qiáng)度法
基于RSSI的測距是利用無線信號(hào)在傳播過程中的衰減,根據(jù)接收信號(hào)強(qiáng)度RSSI值來確定發(fā)射器和接收器之間的距離。與上述幾種方法不同,RSSI法測距不需要復(fù)雜的時(shí)間同步和相應(yīng)的數(shù)據(jù)交換,不需要額外的硬件輔助設(shè)備,是一種簡單易行的無線測距方法。接收信號(hào)強(qiáng)度法定位如圖4所示。
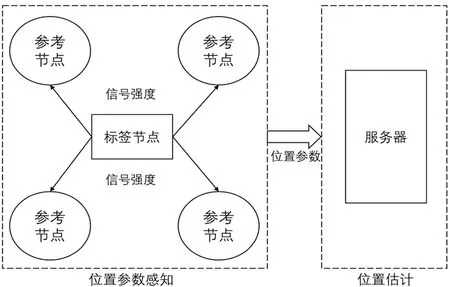
圖4 接收信號(hào)強(qiáng)度法定位
2 接收信號(hào)強(qiáng)度測距的室內(nèi)定位穩(wěn)健估計(jì)方法
2.1 接收信號(hào)強(qiáng)度法測距模型
接收信號(hào)強(qiáng)度測距模型分為經(jīng)驗(yàn)?zāi)P秃痛_定性模型,確定性模型有基于求解麥克斯韋方程的時(shí)域有限差分法、基于幾何光學(xué)射線追蹤法等,經(jīng)驗(yàn)?zāi)P陀芯€性測距模型、多項(xiàng)式測距模型等。本文采用對數(shù)路徑損耗測距模型[14],該模型簡單實(shí)用,是最常用的基于接收信號(hào)強(qiáng)度的無線室內(nèi)測距模型,是一個(gè)以理論為支持的經(jīng)驗(yàn)?zāi)P汀?/p>
在理想環(huán)境中,距離d處的接收功率Pr(d)服從Friis傳播公式:
(1)
式(1)中Pt為發(fā)射功率,Gt和Gr分別為發(fā)射器和接收器的天線增益,λ為發(fā)射信號(hào)波長。
假設(shè)各節(jié)點(diǎn)的天線增益相同,并考慮衰落效應(yīng)的影響,根據(jù)式(1)可得基于接收信號(hào)強(qiáng)度的室內(nèi)測距模型為:
(2)
式(2)中Pr(d)為距離發(fā)射器d處的接收信號(hào)強(qiáng)度,單位為dbm,P0(d0)為距參考距離d0處的接收信號(hào)強(qiáng)度,n表示信號(hào)路徑損耗指數(shù),Xσ為衰落效應(yīng)引起的均值為0,方差為σ2的服從高斯正態(tài)分布的隨機(jī)變量。
取d0=1 m,并設(shè)P0(d0)=A且路徑損耗指數(shù)n已知時(shí),可得Pr(d)的條件概率密度為:
(3)

(4)
2.2 接收信號(hào)強(qiáng)度測距模型誤差方程
由2.4節(jié)中接收信號(hào)強(qiáng)度法的測距模型可得,接收信號(hào)強(qiáng)度可以轉(zhuǎn)化為距離,通過測定未知節(jié)點(diǎn)接收多個(gè)參考節(jié)點(diǎn)的接收信號(hào)強(qiáng)度,可反算未知節(jié)點(diǎn)到多個(gè)參考節(jié)點(diǎn)的距離。本文采用距離后方交會(huì)的穩(wěn)健估計(jì)方法求解未知節(jié)點(diǎn)的坐標(biāo)進(jìn)行室內(nèi)定位,穩(wěn)健估計(jì)的原則是要充分利用有效數(shù)據(jù),限制利用可用數(shù)據(jù)和排除有害數(shù)據(jù)[15]。其觀測方程可表示為式(5):
(5)
其中,di為由接收信號(hào)強(qiáng)度反算的距離,(xr,yr,zr)為未知節(jié)點(diǎn)坐標(biāo),(Xi,Yi,Zi)為參考節(jié)點(diǎn)坐標(biāo)。
將式(5)按照泰勒級數(shù)展開線性化,可得線性觀測方程為式(6):
di=d0+aidxr+bidyr+cidzr
(6)

由式(6)可得誤差方程為式(7):
(7)
2.3 室內(nèi)定位穩(wěn)健估計(jì)方法
(8)
在不等權(quán)獨(dú)立觀測情況下的穩(wěn)健估計(jì)準(zhǔn)則為:
(9)
(10)
(11)
或
(12)

(13)

(14)
2.4 穩(wěn)健估計(jì)選權(quán)迭代過程
(15)
(16)
(17)
(18)

(5)最終的解算結(jié)果為
(19)
(20)
在平差計(jì)算中,權(quán)函數(shù)總是隨改正數(shù)變化而發(fā)生變化,且ωi與vi大小成反比,vi越大,ωi,pi就越小,經(jīng)過多次迭代,含有粗差的觀測值的權(quán)就會(huì)不斷降低,從而削弱其在平差過程中的作用,通過平差過程中不斷改變權(quán)陣最終實(shí)現(xiàn)參數(shù)穩(wěn)健估計(jì)。
3 實(shí)驗(yàn)分析
3.1 模型參數(shù)求解
由式(4)可得,基于對數(shù)路徑損耗接收信號(hào)強(qiáng)度測距模型,未知參數(shù)為 1 m處的接收信號(hào)強(qiáng)度值A(chǔ)和路徑損耗指數(shù)n,本文實(shí)驗(yàn)環(huán)境選擇在會(huì)議室,以發(fā)射器為圓心,分別以 1 m、2 m、3 m、4 m、5 m為半徑,分別在0°、60°、120°、180°、240°、300°方向依次測量RSSI值30次。A值的獲取方式有兩種,一種以 1 m處各角度測量RSSI平均值作為A值,實(shí)驗(yàn)結(jié)果如圖5所示,不同方向?qū)嶋H測定的A值均值為-45.1。另外一種將A值和路徑損耗指數(shù)n當(dāng)作未知參數(shù),分別在1~5 m半徑處,取各方向RSSI平均值作為發(fā)射器在1~5 m處的RSSI值,通過對數(shù)曲線擬合求取A值和路徑損耗指數(shù)n。實(shí)驗(yàn)結(jié)果如圖6所示。由實(shí)驗(yàn)結(jié)果可得,對數(shù)曲線擬合求取的A值與直接測量求取的A值基本保持一致,也間接證明了通過曲線擬合法求取模型參數(shù)的正確性。
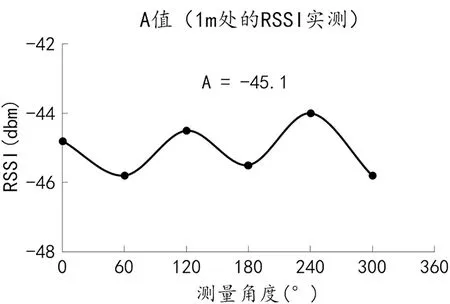
圖5 A值實(shí)測
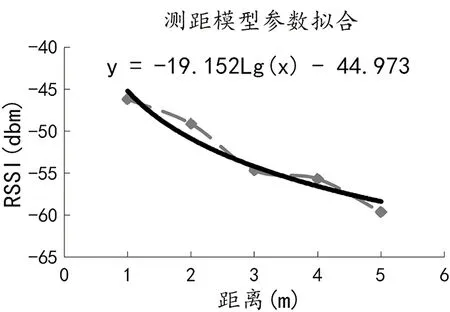
圖6 測距模型參數(shù)擬合
3.2 定位精度統(tǒng)計(jì)
本文選取會(huì)議室為實(shí)驗(yàn)環(huán)境,測試環(huán)境具體參數(shù)為長 8.8 m,寬 8.0 m,高 3.0 m,自由坐標(biāo)系定義以會(huì)議室西北角為坐標(biāo)原點(diǎn),南方向?yàn)閤軸方向,東反向?yàn)閥軸方向,向上為Z軸方向。分別在會(huì)議室四角及會(huì)議室中心布設(shè)9個(gè)參考節(jié)點(diǎn),參考節(jié)點(diǎn)坐標(biāo)分別為(0,0,0),(8,0,0),(0,8.8,0),(8,8.8,0),(0,0,3),(8,0,3),(0,8.8,3),(8,8.8,3),(4,4.4,1.5)。
在測試環(huán)境中隨機(jī)選取30個(gè)未知節(jié)點(diǎn),按照所定義的自由坐標(biāo)系,事先測定選取的隨機(jī)未知節(jié)點(diǎn)的坐標(biāo),通過測定未知節(jié)點(diǎn)到參考節(jié)點(diǎn)的信號(hào)強(qiáng)度反算未知節(jié)點(diǎn)到各參考節(jié)點(diǎn)的距離,最后分別采用經(jīng)典最小二乘算法和本文的穩(wěn)健估計(jì)方法解算未知節(jié)點(diǎn)定位坐標(biāo)。
(21)

(22)
本文分別采用經(jīng)典最小二乘和穩(wěn)健估計(jì)方法進(jìn)行定位解算,兩種方法所求得的點(diǎn)位真誤差結(jié)果如表1和圖7所示,實(shí)驗(yàn)結(jié)果表明同等觀測條件下,文本提出的穩(wěn)健估計(jì)定位解算方法結(jié)果優(yōu)于經(jīng)典最小二乘法。
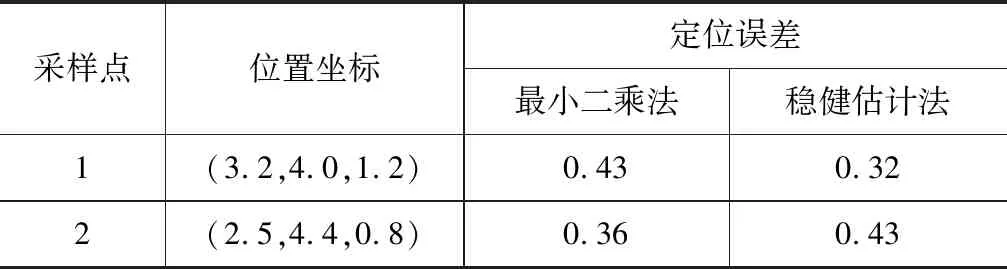
表1 不同方法定位粗差統(tǒng)計(jì)
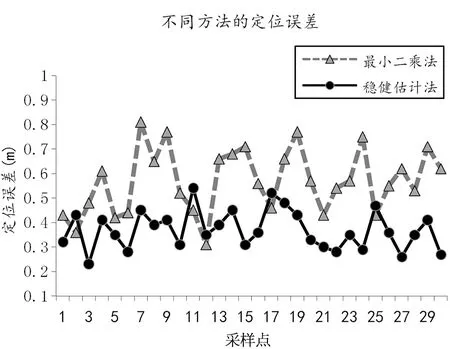
圖7 不同解算方法定位誤差
4 結(jié) 語
本文以接收信號(hào)強(qiáng)度(RSSI)的對數(shù)路徑損耗測距模型為切入點(diǎn),提出一種室內(nèi)無線定位穩(wěn)健估計(jì)方法。通過實(shí)驗(yàn)求解測距模型參數(shù),并在此基礎(chǔ)上,采用距離后方交會(huì)實(shí)現(xiàn)室內(nèi)定位解算,最后對比經(jīng)典最小二乘法和本文方法的定位精度,實(shí)驗(yàn)結(jié)果表明本文方法定位精度更高,魯棒性更好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34