盾構機刀盤主驅動電機異常檢測與性能評估
2023-10-29 10:07:06唐宇翔陶建峰劉成良
西安交通大學學報 2023年10期
唐宇翔,陶建峰,2,劉成良,2
(1. 上海交通大學機械與動力工程學院,200240,上海;2. 上海交通大學機械系統與振動國家重點實驗室,200240,上海)
盾構機[1]是隧道掘進施工的關鍵設備,在地下軌道交通和隧道挖掘等領域有著十分廣泛的應用。主驅動是盾構機中的核心驅動系統,電機是主驅動中重要的動力元件,對于盾構機安全高效的掘進有著重要影響。主驅動電機如果出現異常[2-4],將影響刀盤切削作業,導致掌子面穩定性和安全性降低;另一方面,部分電機性能衰退,將導致其余電機過載,加速主驅動電機的失效。為了確保主驅動系統的健康,監測主驅動電機狀態、預測其性能變化,具有十分重要的意義。
在對電機異常檢測和故障診斷的研究中,Cai等[5]基于振動和聲發射數據,提出了一種基于貝葉斯網絡的電機早期故障診斷方法,采用小波閾值去噪和最小熵反褶積方法提高信噪比,采用互補集成經驗模態分解方法提取信號特征值,利用貝葉斯網絡進行早期、中期和永久故障的識別。Sun等[6]針對電機的高頻振動信號,提出了一種基于深度神經網絡的感應電機故障診斷方法,采用稀疏自編碼器記錄特征,識別電機故障Gangsar等[7-8]采集了電機的振動信號和電流信號,通過大量數據分析了10種不同的電機故障類型,采用支持向量機的方法實現電機的故障診斷。Liu等[9]針對振動信號,提出了一種多尺度核的殘差卷積神經網絡,能夠應對在不同條件下振動信號的非平穩問題。Gyftakis等[10]研究了基于電流的方法的有效性和可靠性,以利用磁通量進行比較臨界評估,提出了一種基于Goerges現象的瞬態方法診斷電機匝間短路。Sai等[11-12]嘗試通過電流信號和聲音信號來檢測電機異常,提出了一種基于特征增量式廣義學習(FIBL)和奇異值分解(SVD)的的電機故障診斷方法。Glowacz等[13]嘗試通過聲音信號來監測電機異常,用最近鄰分類器(NN)、最近鄰分類器(NM)和高斯混合模型(GMM)完成電機的診斷。Asad等[14]建立混合模型,通過有限元仿真計算來判斷電機的異常情況。此外,一些基于多信號融合的檢測方法[15-17]在近些年被提出,側重于使用多數量和多種類的傳感器獲取不同形式的特征信號,綜合利用多種信號進行電機的異常檢測和性能評估。
雖然目前對于電機的異常檢測和故障診斷已有諸多方法,但是仍然面臨著現場條件受限、數據不足[18]的挑戰。首先,施工現場的設備采集信號多是來源于PLC控制器,缺乏常見電機診斷方法中需求的高頻振動信號,高頻電流信號甚至聲音信號、聲發射信號等;其次,數據驅動的電機診斷算法要求單臺電機的完整信息,然而包含故障數據在內的實際工況下的全壽命電機數據,獲取十分困難;而基于實驗室數據開發的異常檢測和故障診斷方法僅針對特定電機有效,存在遷移特性差等問題。
自動編碼器(Autoencoder)是一類在半監督學習和無監督學習中使用的神經網絡,其主要功能是以輸入數據為目標進行表征學習、記錄特征,因而被廣泛應用于數據降維和異常值檢測等領域。卷積長短時記憶網絡(ConvLSTM)是長短時記憶網絡的變種,是為了克服長短時處理高維數據的不足而做的一種增加了卷積操作的改進,能夠更有效地處理時序信息和空間特征。多尺度循環自編碼網絡結合二者的優勢,既能夠對輸入數據進行表征學習,又同時能夠處理空間和時間特征,非常適用于多維時間序列數據的處理,為機械設備的異常檢測及故障診斷提供了新的思路。
為了降低算法與具體電機型號之間的強相關性,擺脫對大量故障數據的依賴,并且保證方法的通用性和遷移性能。本文提出了一種基于多尺度循環自編碼網絡的電機異常檢測和性能評估方法,該方法采用PLC控制器中電機電流數據作為評估電機工作狀態的原始數據;首先對數據進行清洗、篩選、切片等預處理工作后構建電機組差異性矩陣作為算法訓練集;其次訓練多尺度循環自編碼器以完成特征提取和學習;最后通過經過模型的重構輸出與輸入的殘差檢測電機異常,給出電機性能指標。所提方法能快速、有效、準確地識別電機異常和評估電機性能,適用于工程現場。
1 主驅動電機差異性度量
1.1 基本原理
一般的盾構機主驅動[19]裝置由主軸承、驅動電機、減速器及大小齒輪組成,軸承外圈通過連接法蘭用螺絲與前體固定,內(齒)圈用螺絲和刀盤連接,通過驅動電機、減速器、大小齒輪、軸承內齒圈直接驅動刀盤旋轉,如圖1所示。

圖1 盾構機刀盤主驅動結構示意圖[20]Fig.1 Structure of shield tunneling machine cutter main drive
目前能夠獲取到電機的頻率信號、電機的電流信號、電機的扭矩百分比信號。由于隧道掘進機在行進的過程中刀盤是轉動的,并且各個電機的分布都是圍繞圓心對稱分布,理論上來講平均負載應該是相同的,基于此可以設計算法實現異常電機的離群檢測。本文假設在主驅動電機組中與其他電機差異最大的電機為潛在的異常電機,所以電機的異常檢測可以轉化為電機時間序列信號的差異性檢測,將基于電流信號分析電機之間的差異性。
1.2 差異性度量
電機的電流信號是典型的時間序列,描述兩個時間序列之間的相似性多種方法包括歐幾里得距離[21]、DTW距離[22]、曼哈頓距離[23]等。對于高頻時間序列,相似信號之間可能會存在時間刻度上的偏移,比較適合使用DTW距離來減小時間位移的影響。而對于低頻時間序列,歐幾里得距離可以描述序列之間的差異情況。本文中PLC獲取的電機電流信號是低頻的長時間序列,所以選擇歐幾里得距離作為描述兩個信號之間差異性基本方法。
考慮到信號長度不一定相同且時間序列過長可能導致得出的歐幾里得距離很大,故選用兩個時間序列的絕對差序列的均方根作為其差異性度量,計算式為

(1)
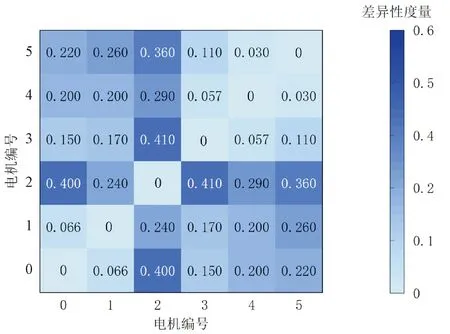
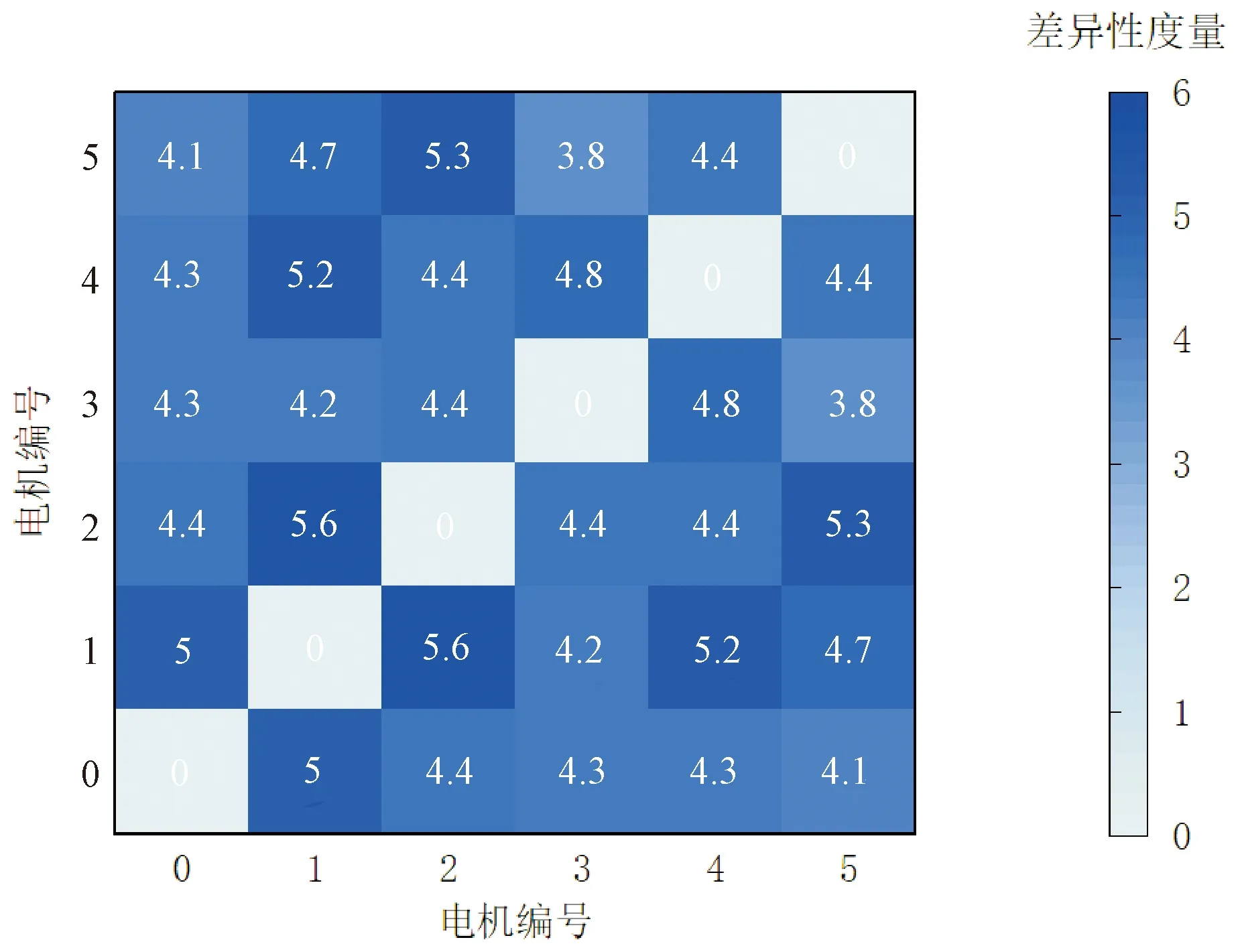
式中:M(i,j)為第i個信號與第j個信號的差異性度量值;n為不同的信號數;T為時間序列的長度。本文中取n=6為例,之后涉及到電機數取值同此處理。6個電機兩兩之間總共能構成15種不同的組合,為了便于描述和數據分析,采用6×6的矩陣(稱為差異性矩陣)記錄以上距離,如圖2所示。

圖2 差異性矩陣Fig.2 Variance matrix
在差異性矩陣中,對應位置的值越大表明該單元格對應的兩個電機電流信號之間的差異性越大,用熱力圖將差異性矩陣繪制出來,可以觀察差異性較大的電機對分布,從而根據差異性矩陣來判斷整個主驅動電機組的性能。為了更充分描述電機組在某一時刻的性能,需要綜合考慮不同時間序列長度對性能的影響。根據不同的時間序列長度,共選擇了時長分別為30、60、90 s的時間序列,如圖3所示,最終以3種不同尺度的差異性矩陣作為t時刻的差異性度量,并作為后文所述多尺度循環自編碼器的輸入。

(a)以時長30 s電流信號計算出的差異性矩陣

(b)以時長60 s電流信號計算出的差異性矩陣
(c)以時長90 s電流信號計算出的差異性矩陣
2 多尺度循環自編碼器方法
本節將介紹對差異性矩陣進行異常檢測的多尺度循環自編碼神經網絡設計方法。
2.1 自編碼器網絡
自動編碼器[24]結構分為編碼器和解碼器:編碼器的作用是將輸入數據通過幾層不同的卷積神經網絡進行特征提取對輸入數據進行降維;解碼器的作用是對提取后的特征數據通過反卷積神經網絡進行升維還原。通過比對還原后的數據與輸入數據的差距可以判斷編碼器和解碼器網絡是否提取了訓練集數據的正確特征。自動編碼器的結構如圖4所示。

圖4 自編碼器網絡結構Fig.4 Network structure of auto-encoder
自編碼器網絡以殘差矩陣的元素均方根值作為損失函數來最小化重構誤差,使得該自編碼器能夠記錄訓練數據的關鍵特征。
2.2 網絡結構設計
由于對時間序列的異常檢測不能僅僅關注當前時刻,還需要綜合考慮前后相鄰時刻的相關數據對當前時刻的影響,所以對于每個時刻t,選取當前時刻和前4個時刻t-4,t-3,t-2,t-1, 5個時刻的差異性矩陣組成一個 [5,3,6,6]的四維張量作為時刻t最終的編碼器網絡輸入。加入了時間步長的多尺度自編碼網絡結構如圖5所示。
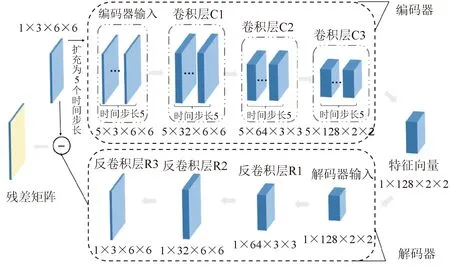
圖5 多時間步長自編碼器網絡結構Fig.5 Multi-timesteps auto-encoder
引入多時間步長之后,編碼器的輸入輸出和解碼器的輸入輸出的維度就不匹配了,同時編碼器的卷積神經網絡提取的是電機電流信號之間的特征,并沒有聚合時間尺度的特征,需要進一步地調整。為了解決上述問題,選擇在編碼器和解碼器中連接一層卷積長短時記憶網絡層[25](ConvLSTM)來完成時間尺度的特征融合和輸入輸出數據的維度匹配,并將計算結果合并到編碼器下一層的輸入中,新的網絡稱為多尺度循環自編碼器,其結構如圖6所示。

圖6 多尺度循環自編碼器網絡結構Fig.6 Multi-scale convolutional auto-encoder
在參數選擇上,由于需要適應不同大小的差異性矩陣,卷積層與反卷積層的數量決定了能否從訓練數據中提取到足夠豐富的特征;卷積核的大小和移動步長決定了編碼器和解碼器輸入輸出的一致性和特征提取的有效性;
在卷積層與反卷積層數的選擇上,一般而言,盾構機主驅動電機數為6~30,即構建的差異性矩陣維度為6~30,過多的卷積層會將數據過度壓縮,而過少的卷積層則會導致提取特征不完全;經過試驗選擇,選擇3至4層的卷積層與反卷積層能夠同時獲得較快的收斂速度和較為準確的檢測結果。本文根據電機數量選取3層卷積層與3層反卷積層構建多尺度循環自編碼器的編碼網絡和解碼網絡。
在卷積核的選擇上,過大的卷積核會使得特征信息丟失嚴重,過小的卷積核會導致特征提取不完全的情況,最終導致網絡發散。為解決上述問題,通過理論分析和試驗測試,最終在編碼器中選擇先使用維度為3卷積核配合1×1的移動步長做第1層卷積;再使用維度為3的卷積核配合2×2的移動步長做第2層卷積;最后使用維度為2的卷積核和2×2的步長做第3層卷積。在解碼器中選擇則是順序相反的3層反卷積層。在連接編碼器和解碼器的卷積長短時神經網絡的參數選擇中,選擇維度為3的卷積核配合輸入數據的時間步長,選擇5層的內部結構。具體參數選擇如圖7所示。

圖7 多尺度循環自編碼器網絡參數Fig.7 Multi-scale convolutional auto-encoder parameters
3 異常檢測流程
本節將介紹整個異常檢測的流程,包括數據的獲取,預處理以及如何使用多尺度循環自動編碼器神經網絡完成異常檢測,流程如圖8所示。

圖8 異常檢測流程Fig.8 Flowchart of anomaly detection
一方面,通過正常運行時期健康電機的數據進行訓練數據集的構建,訓練多尺度循環自編碼器,使得編碼器記錄正常良好運行時的數據特征;另一方面,待檢測數據通過數據預處理構建差異性矩陣,通過預先訓練好的多尺度循環自編碼器生成重構矩陣,通過判斷重構矩陣與原始輸入矩陣的殘差判斷該時段電機是否存在異常,如果異常則可以通過殘差矩陣和原矩陣定位異常電機。
3.1 數據獲取和預處理
從PLC中獲取的數據采樣頻率為1 Hz,數據采集不區分工作時間與非工作時間,所以數據預處理的工作是要將工作時間篩選出來,一個自然且樸素的想法是選取電機電流信號大于零的時間段,一天之內1號電機電流信號如圖9所示。
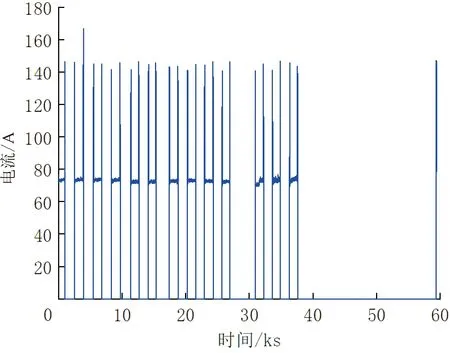
圖9 一天中電機1#電流信號時序圖Fig.9 Motor current signal in one day
掘進過程中因為面臨地質參數和選擇掘進參數的不同會導致電機的負載情況不同,在此情況下檢測電機異常,評估電機性能十分困難。根據推進力是否為零可以將掘進階段[26]細分為啟動段、掘進段、停機段。橫坐標范圍內所示啟動段的電機電流信號如圖10所示。

圖10 啟動段各個電機信號Fig.10 Motor signals in the start section
在電機啟動段的時候,電機開始工作并緩慢帶動刀盤加速旋轉直至加速到穩定的轉速。在刀盤加速至目標轉速的過程中,刀盤尚未與巖壁接觸,期間存在一段電機帶動刀盤穩定空轉的過程,其信號特點是:刀盤開始旋轉,尚未產生推進力,刀盤扭矩穩定,此時系統的負載只取決于系統本身,為電機之間的差異性分析提供了較為穩定的參照比較環境,如圖10中紅色框中間的區域所示,選用該段信號作為電機之間的差異性分析參照能夠盡可能地減少工況不同帶來的影響。將截取到的電機電流信號按照第1節中所描述方法構造出相應的差異性矩陣,完成了整個數據的獲取與預處理工作。
3.2 異常檢測
本文基于第2節中多尺度循環自編碼器的特征提取與記錄的特點,設計如下異常檢測方法。
首先,將正常運行數據經過上小節中的預處理之后進行編碼,生成差異性矩陣,構建訓練集;再將訓練數據輸入多尺度循環自編碼器中得到重構輸出數據,以訓練輸入數據和重構輸出數據的殘差均方根值為損失函數來訓練網絡參數,使得該自編碼器模型學習并記錄正常運行時電機電流信號差異性矩陣的數據特征。模型訓練完成后,將待檢測數據同樣經過預處理后構建差異性矩陣,將待檢測數據的差異性矩陣輸入訓練后的自編碼器模型中得到重構數據,根據待檢測輸入數據與重構輸出數據的殘差情況判斷待檢測輸入數據的異常情況。
如果待檢測輸入數據正常運行,由于模型是根據正常運行數據訓練出來的,并以最小化殘差為訓練目標,所以最后得到的殘差較小;如果待檢測輸入數據是異常運行數據,由于模型在訓練過程中沒有學習記錄異常數據的特征,所以最后得到的殘差一般較大。殘差矩陣中每個元素為對應位置的原矩陣元素與重構矩陣元素的差值的平方,其數據分布上的特點是:正常數據與重構數據的殘差矩陣的均值和峰值維持在相對較低的水平;異常數據與重構數據的殘差矩陣的均值和峰值一般較大,同時會出現明顯的異常元素。
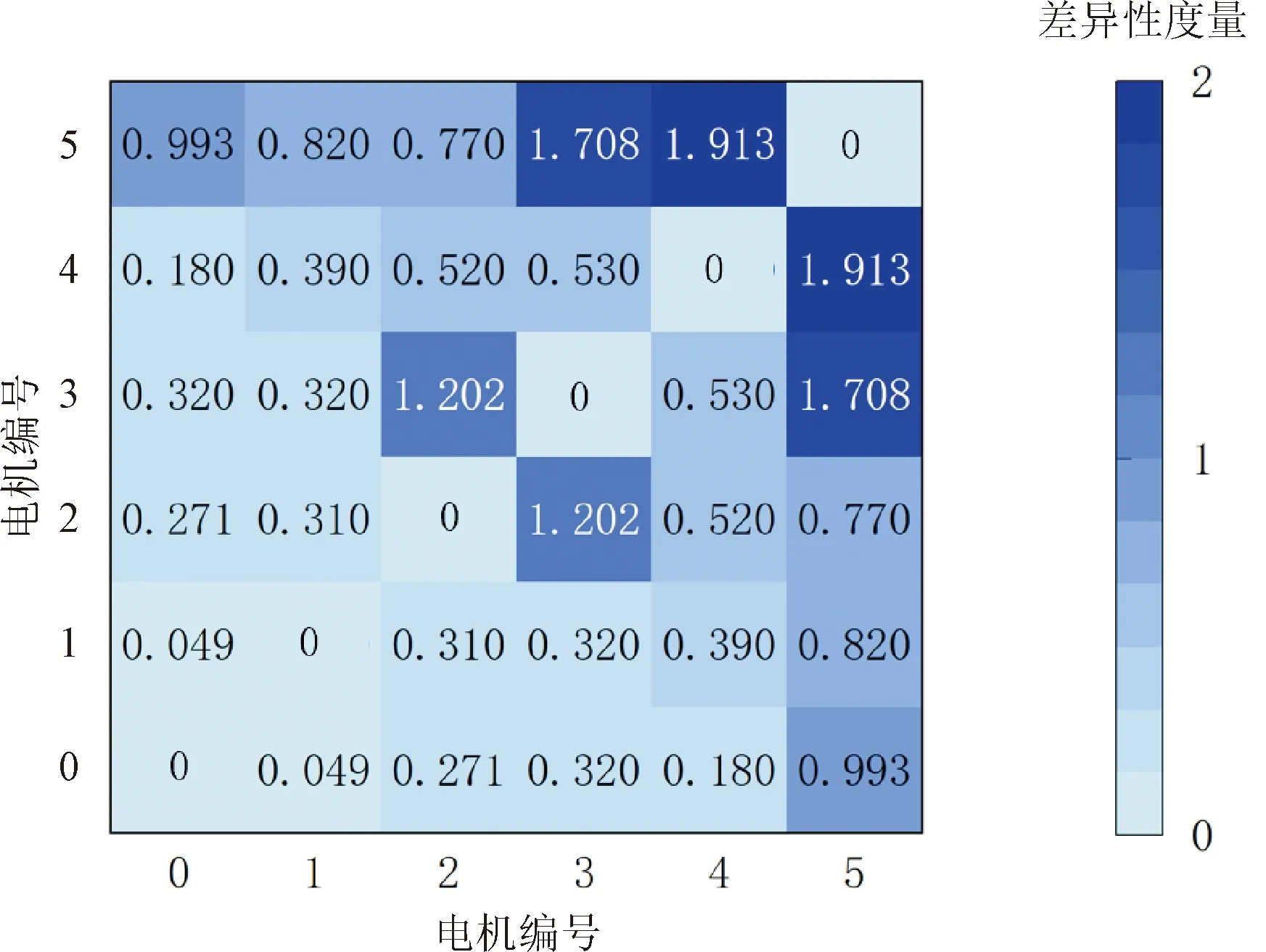
正常和異常數據的原矩陣、重構矩陣、殘差矩陣如圖11、圖12所示。可知:正常數據與其重構矩陣的殘差矩陣峰值為0.13,均值為0.024;異常數據與其重構矩陣的殘差矩陣峰值為0.94,均值為0.126;正常數據的殘差矩陣的峰值和均值較小,而異常數據的殘差矩陣的峰值和均值較大,并且會有0.94、0.82、0.63等異常值出現,在熱力值圖中觀察也能夠快速準確定位異常電機的編號。

(a)正常原矩陣

(b)重構矩陣

(c)殘差矩陣
進一步地,在盾構機掘進時,如果在之前的工作過程中沒有出現異常,可以使用這些數據構建新的訓練集對該網絡進行遷移學習,使得得到的新模型更加符合目前的掘進狀態和地質參數。
(a)異常原矩陣

(b)重構矩陣
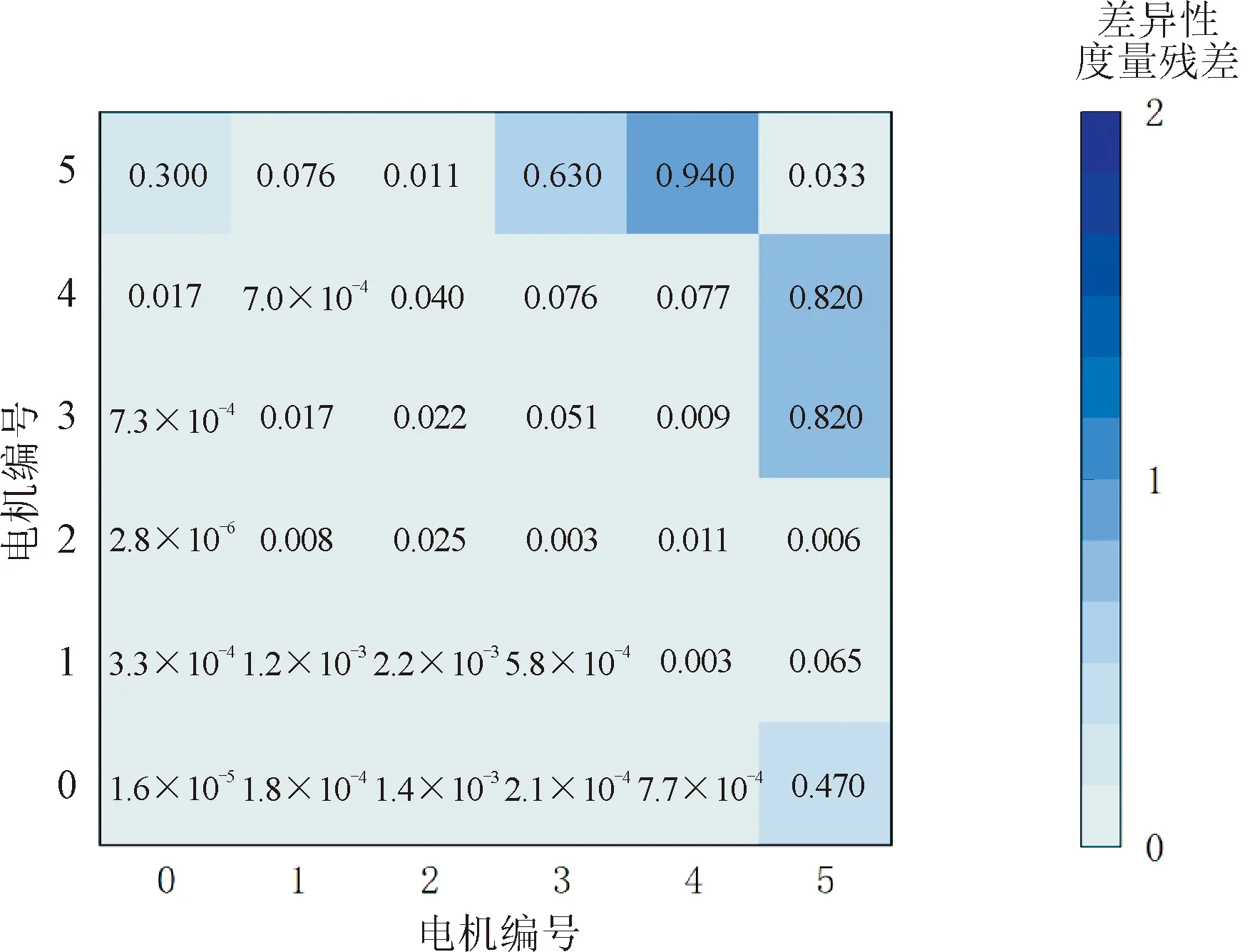
(c)殘差矩陣

圖13 異常檢測結果Fig.13 Result of anomaly detection
圖13展示的是對一段時間的運行數據進行異常檢測的結果。其中縱坐標健康狀態編號0~5表示當前時刻發生異常的電機編號;-1表示當前時刻系統正常工作,沒有電機出現異常;-2表示當前時刻存在多個異常電機。圖14展示的是對圖13中測試的模型進行遷移學習之后得到的新模型的測試結果。選取了測試數據之前一段時間的電機正常運行數據作為新的補充訓練集,可以發現,遷移學習后得到的模型的準確度和穩定性都更有優勢。將檢測結果與盾構機維修日志進行對照,能夠很好檢測出電機異常的發生,并且對于沒有維修記錄的異常情況能夠給出提示與預警。
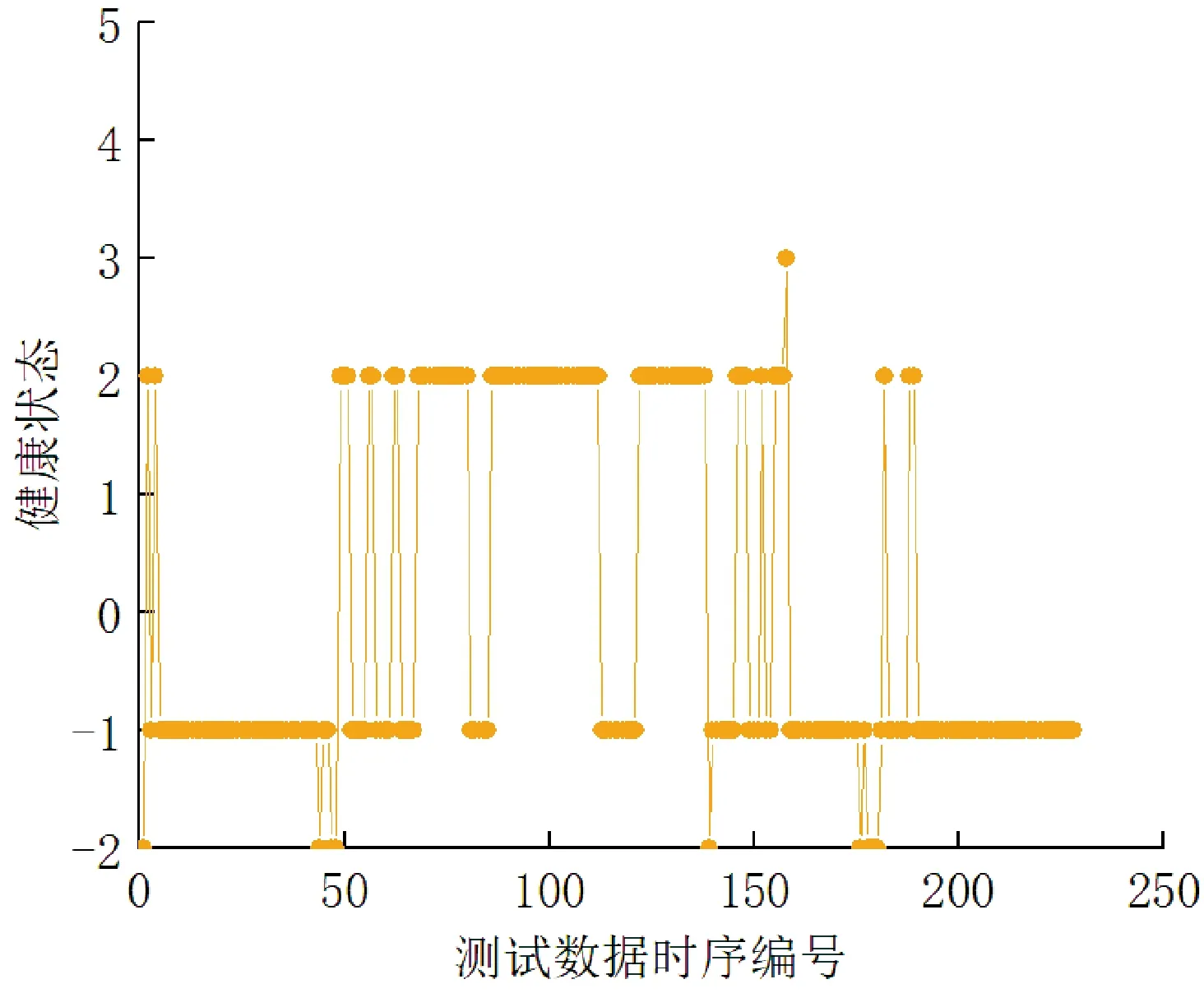
圖14 遷移學習之后異常檢測結果Fig.14 Result of anomaly detection after transfer learning
4 性能指標與可視化
本節中要將時間跨度放大,考慮整個主驅動電機組系統的性能的變化情況,給出評判系統狀態的相應性能指標。
性能評估與異常檢測有著較大的區別,至少兩者所關心的時間尺度大不相同,但是第1節中提到的異常檢測中差異性度量仍是性能評估的一個重要參考指標。排除不同工作狀態的干擾是進行性能評估的難點,第3節中提到的選擇啟動段數據就是一個很好的思路。主驅動電機組系統的性能與各個主驅動電機的工作狀態密切相關,當各電機正常工作時,主驅動電機組性能相對良好,當某個電機工作狀態出現異常時,主驅動電機組性能就會變化,并且隨著異常的累計會逐漸降低。因此,可以通過監控各個主驅動電機的異常情況來評估主驅動電機組的工作性能。
綜上所述,本文通過如下方式構建主驅動電機組系統的性能指標:選擇一天之內的所有啟動段數據作為新的時間序列構建差異性矩陣,如圖15(a);再對矩陣的每一行求和表示當天該電機在系統中的相對差異性評分,如圖15(b)所示。根據每個電機的差異性評分,將之取倒數之后再歸一化后可以得到如圖16所示的結果。
(a)差異性矩陣

(b)根據差異性矩陣計算所得差異性評分
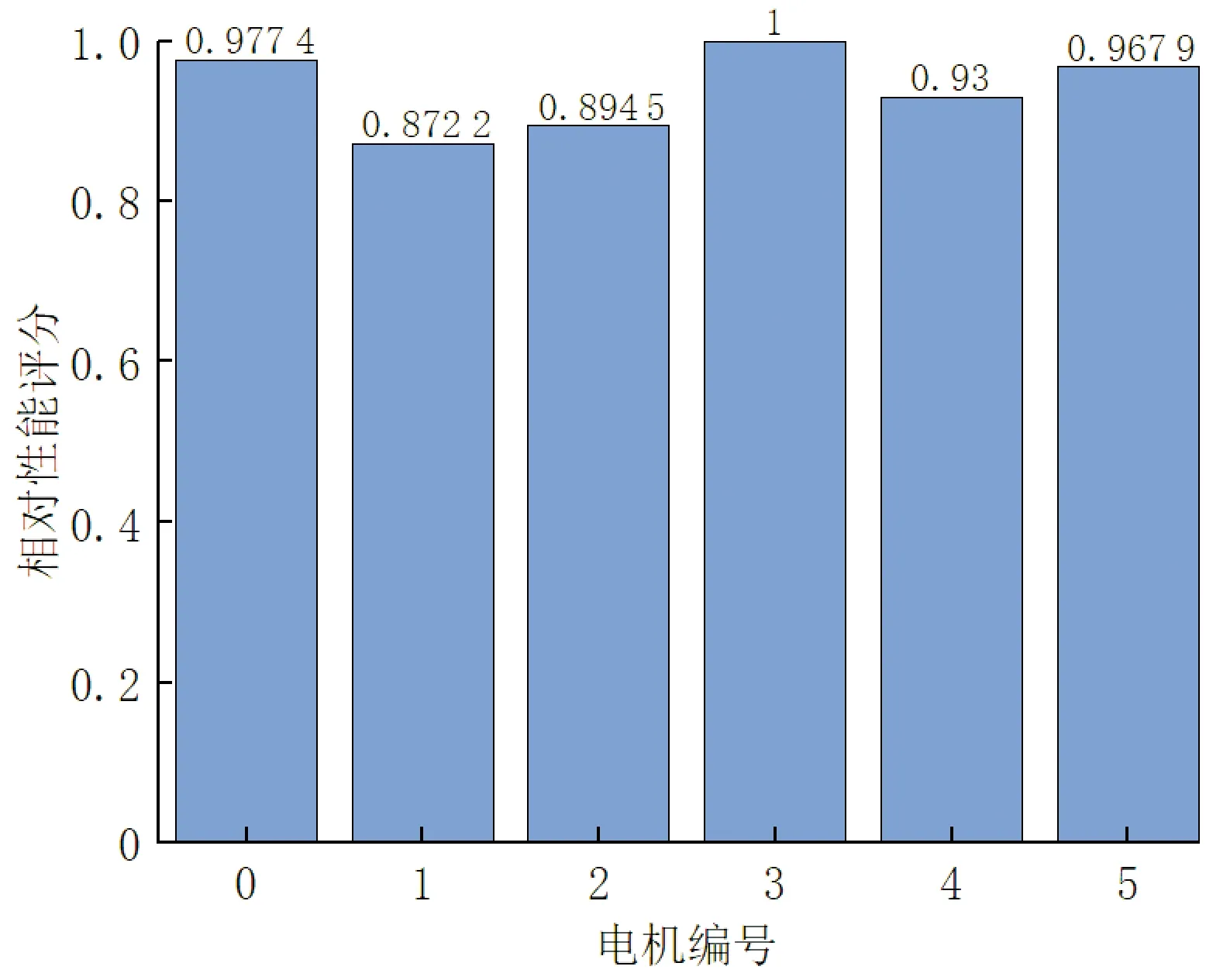
圖16 相對性能評分Fig.16 Relative performance score
最后,根據歸一化的性能指標可以繪制當天電機之間的相對性能指標雷達圖作為系統性能的可視化表達,如圖17所示。雷達圖的面積能夠反映出系統的性能優劣,將每天的性能雷達圖面積計算出來可以形成一個隨著時間衰減的時間序列,如圖18所示。
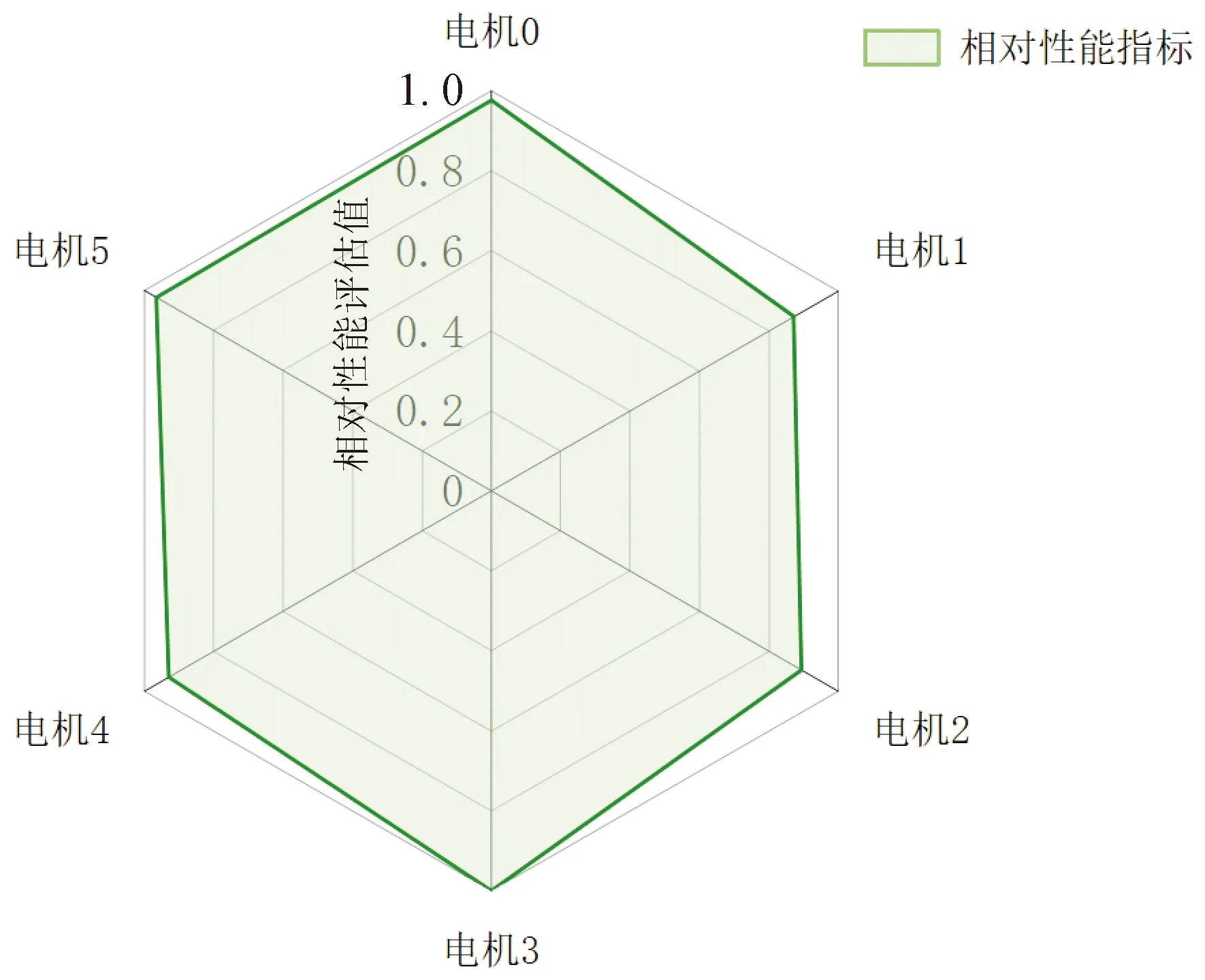
圖17 電機相對性能雷達圖Fig.17 Motor relative performance radar chart

圖18 主驅動電機組性能變化曲線Fig.18 Performance change curve of main drive motors
其中,性能指標曲線表示的是真實計算出來的雷達圖面積值變化曲線,性能變化曲線表示的是根據性能指標曲線濾波平滑后的變化曲線,其擁有較好的單調特性,可以作為一種系統整體性能的度量,性能的評估與預測都可以基于性能變換曲線進行。
5 驗證與分析
為了驗證本文算法在實際工程中異常檢測的性能,選用印度孟買D215盾構掘進工程數據對本文算法進行測試。
印度孟買D215盾構掘進工程數據日志顯示在掘進第76環的時候5#電機發生異常,將該環數據分段截取編碼成840組驗證數據,共有762組數據結果正確,78組數據判斷錯誤,在該環數據上的準確率為90.71%;在115環掘進過程中,3號電機的信號與其他電機的信號差異較大,屬于性能異常但沒有達到故障的程度。對該環的掘進數據進行截取編碼成456組驗證數據,共有435組數據判斷正確,21組數據判斷錯誤,在該環數據的準確率為95.39%。這表明本文算法在實際工程中有著較高的準確率和應用價值。
除此之外,為了驗證多尺度循環自編碼器在電機異常檢測中的作用,還對比了差異性算法與本文算法在實際工程中異常檢測準確率上的差別,并對其余環的數據進行了測試驗證。差異性算法指的是不經過多尺度循環自編碼器的重構獲取殘差矩陣,而是直接根據差異性矩陣所表現出來的電機之間的差距判斷測試數據的異常情況并定位異常。兩種算法的對比實驗結果如圖19、圖20所示。

圖19 算法測試結果(Ⅰ)Fig.19 Algorithm test results (Ⅰ)
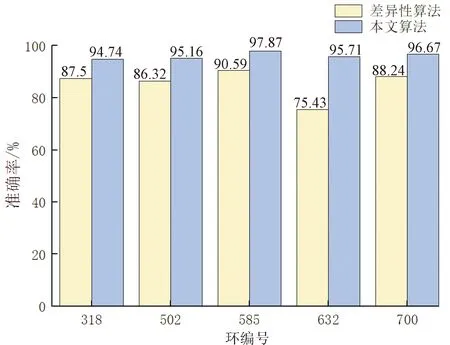
圖20 算法測試結果(Ⅱ)Fig.20 Algorithm test results (Ⅱ)
由圖19、圖20可以看出,對于不同的掘進環號,在不同的地質條件和掘進參數的情況下,差異性算法的異常檢測準確率差距較大,而本文算法能夠穩定在90%左右,說明多尺度循環自編碼器能夠準確地從原始數據中提取由電機異常引起的差異性分量,有助于提升異常檢測的穩定性和準確率,證明其在實際工程應用中的優越性。
上述結果可以反映出該模型與算法能夠對于正常數據和異常數據的區分有著較高的準確性,雖然由于實際故障數據的缺失,能否通過異常數據預測故障發生還有待更為深入的研究,但是本文提出的算法已經能夠較為準確、穩定地檢測異常,對故障的預警和性能變化的監控有著重要意義。
6 結 論
(1)本文利用盾構機主驅動電機的同位特性,利用電機電流信號之間的差距構建描述系統性能的差異性矩陣,使用多尺度自動編碼器網絡完成電機的異常檢測。
(2)選取電機啟動段電流信號受工況載荷的干擾小,利用差異性矩陣構建描述系統內相對性能的性能雷達圖,通過雷達圖面積描述系統性能的變化情況,給出一種描述主驅動電機組狀態的性能指標。
(3)通過現場數據的驗證和分析,說明本文提出的方法提供了一種針對現場數據的電機異常檢測方法,并且有著較高的準確率。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25