基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測研究
2023-10-28 12:53:18唐梓彭魏超上官炫爍張駿何梓瑜許耀華
太陽能 2023年3期
關(guān)鍵詞:檢測
唐梓彭 魏超 上官炫爍 張駿 何梓瑜 許耀華

摘 要:光伏跟蹤系統(tǒng)可提高光伏發(fā)電系統(tǒng)的發(fā)電效率,但由于光伏跟蹤系統(tǒng)的運(yùn)行機(jī)構(gòu)及運(yùn)動控制算法等存在不穩(wěn)定性,常會導(dǎo)致其運(yùn)行效果不理想,跟蹤精度難以保障。為實(shí)現(xiàn)光伏跟蹤系統(tǒng)跟蹤誤差的現(xiàn)場檢測,設(shè)計(jì)了一種基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測裝置,該裝置主要包括1個(gè)由多個(gè)光敏二極管傳感器以三維陣列規(guī)則鑲嵌構(gòu)造的圓球體和主控制系統(tǒng)等;并設(shè)計(jì)了基于激光水平儀的傳感器標(biāo)定方案,實(shí)現(xiàn)傳感器初始值偏差校正,提升檢測裝置一致性,實(shí)現(xiàn)對單軸或雙軸光伏跟蹤系統(tǒng)跟蹤誤差的自動檢測。經(jīng)設(shè)備試制及測試驗(yàn)證,結(jié)果表明:該檢測裝置可滿足光伏跟蹤系統(tǒng)跟蹤誤差檢測精度需求,能夠準(zhǔn)確在線檢測單軸、雙軸光伏跟蹤系統(tǒng)在不同情況下的跟蹤誤差。
關(guān)鍵詞:光伏跟蹤系統(tǒng);跟蹤誤差;光敏二極管傳感器;三維陣列;初始值標(biāo)定;檢測
中圖分類號:TK519 文獻(xiàn)標(biāo)志碼:A
0? 引言
2020年9月22日,習(xí)近平總書記在第75屆聯(lián)合國大會上宣布中國要奮力2030年實(shí)現(xiàn)碳達(dá)峰、2060年碳中和戰(zhàn)略目標(biāo),這是黨中央做出的重大戰(zhàn)略決策[1-2]。2021年3月1日,國家電網(wǎng)公司發(fā)布其《“碳達(dá)峰、碳中和”行動方案》,該方案提出在能源供給側(cè)構(gòu)建多元化清潔能源供應(yīng)體系,大力發(fā)展清潔能源,加快太陽能熱發(fā)電技術(shù)推廣應(yīng)用,最大限度開發(fā)、利用風(fēng)能、太陽能等新能源[3]。
傳統(tǒng)的光伏發(fā)電系統(tǒng)多采用固定傾角安裝光伏組件,但太陽光照射角度每時(shí)每刻都在變化,采用光伏跟蹤系統(tǒng)能夠有效提升光伏發(fā)電系統(tǒng)的發(fā)電效率,從而提高發(fā)電量。但由于光伏跟蹤系統(tǒng)的機(jī)械結(jié)構(gòu)、傳動系統(tǒng)、控制系統(tǒng)等存在一定的不穩(wěn)定性及故障率,導(dǎo)致光伏跟蹤系統(tǒng)在運(yùn)行中會出現(xiàn)跟蹤誤差,不僅影響光伏組件接收的太陽輻照量,也存在安全隱患。
隨著中國越來越多的光伏發(fā)電示范項(xiàng)目采用光伏跟蹤系統(tǒng),在現(xiàn)場運(yùn)行場景下對光伏跟蹤系統(tǒng)的跟蹤誤差和偏離程度進(jìn)行檢測分析的需求度也日益提升。這種需求度主要體現(xiàn)在:一方面,需要可靠的檢測方法及裝備,以準(zhǔn)確排查光伏跟蹤系統(tǒng)運(yùn)行問題,輔助光伏電站的檢修運(yùn)維工作;另一方面,通過檢測分析手段,將光伏跟蹤系統(tǒng)運(yùn)行性能數(shù)據(jù)反饋給設(shè)備供應(yīng)商側(cè),可促進(jìn)光伏跟蹤系統(tǒng)穩(wěn)定性與跟蹤精度的優(yōu)化和提升,有助于此類系統(tǒng)進(jìn)一步推廣應(yīng)用,實(shí)現(xiàn)光伏電站從采用固定式支架系統(tǒng)向采用高效的光伏跟蹤系統(tǒng)的轉(zhuǎn)變。
現(xiàn)有的光伏跟蹤系統(tǒng)產(chǎn)品多依照UL2703、UL3703進(jìn)行型式試驗(yàn)及認(rèn)證,但在現(xiàn)場運(yùn)行場景下很難進(jìn)行跟蹤誤差的檢測分析。GB/T 29320—2012《光伏電站太陽跟蹤系統(tǒng)技術(shù)要求》中,針對光伏跟蹤系統(tǒng)的相關(guān)型式、性能、安全性等方面規(guī)定了具體的檢測要求,但多基于實(shí)驗(yàn)室環(huán)境,并不完全適用于光伏跟蹤系統(tǒng)現(xiàn)場運(yùn)行場景下的檢測或故障診斷。上述國際標(biāo)準(zhǔn)及國內(nèi)標(biāo)準(zhǔn)中針對光伏跟蹤系統(tǒng)跟蹤誤差檢測的方法有針孔法、角度尺及水平角度儀法[4]。但這些方法目前既缺乏具體設(shè)備技術(shù)要求,也缺乏系統(tǒng)性的檢測評估方法支撐,均不適合在光伏跟蹤系統(tǒng)現(xiàn)場運(yùn)行場景中直接應(yīng)用。
國外針對光伏跟蹤系統(tǒng)的研究起步于20世紀(jì)60年代,目前已成功進(jìn)行了商業(yè)應(yīng)用[5]。國內(nèi)對光伏跟蹤系統(tǒng)的研究多針對此類系統(tǒng)的系統(tǒng)設(shè)計(jì)、跟蹤策略優(yōu)化、太陽方位檢測與跟蹤等方面[6],對于其在現(xiàn)場運(yùn)行場景下的跟蹤誤差檢測及故障診斷分析則少有涉及。
馬桂龍等[7]提出了一種基于自適應(yīng)預(yù)測算法的光伏陣列最大功率點(diǎn)跟蹤技術(shù),在擾動觀察法的基礎(chǔ)上引進(jìn)自適應(yīng)預(yù)測的方法,以提高跟蹤速度,達(dá)到快速穩(wěn)定地實(shí)現(xiàn)光伏陣列最大功率點(diǎn)的跟蹤。但是該方法在現(xiàn)場檢測中,難以便捷快速地檢測跟蹤誤差。張海昇等[8]提出了基于平頂錐形傳感器的光伏組件方位檢測系統(tǒng),利用光電傳感器檢測被測光伏組件是否正對著太陽方位,產(chǎn)生電信號驅(qū)動跟蹤器修正方位,其利用被動跟蹤原理檢測跟蹤器的跟蹤誤差,光伏跟蹤系統(tǒng)的現(xiàn)場檢測中可借鑒此方法。
本文在上述研究基礎(chǔ)上,設(shè)計(jì)了一種基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測裝置,并進(jìn)行了試制,該裝置能夠?qū)夥櫹到y(tǒng)的跟蹤誤差進(jìn)行自動檢測,并能實(shí)現(xiàn)流程自動化、數(shù)據(jù)可視化,脫離依靠人工觀察判斷的模式,提升現(xiàn)場檢測效率與精度;同時(shí),設(shè)計(jì)了基于激光水平尺的光敏二極管傳感器初始偏差校正方案,以提高傳感器檢測的一致性。
1? 基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測裝置設(shè)計(jì)
1.1? 工作原理與設(shè)計(jì)
本文從現(xiàn)場檢測光伏跟蹤系統(tǒng)跟蹤誤差的角度出發(fā),設(shè)計(jì)一種能滿足一定檢測精度要求的基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測裝置。該裝置主要包括1個(gè)由多個(gè)光敏二極管傳感器以三維陣列規(guī)則鑲嵌構(gòu)造的圓球體和主控制系統(tǒng),通過主控制系統(tǒng)中的信號處理和數(shù)據(jù)分析模塊及可視化模塊,可實(shí)現(xiàn)流程自動化、數(shù)據(jù)可視化。利用激光水平儀搭建一個(gè)本檢測裝置的校準(zhǔn)平臺,完成傳感器的初始偏差校準(zhǔn),保證傳感器在可測范圍內(nèi)的一致性。
光伏跟蹤系統(tǒng)包括單軸光伏跟蹤系統(tǒng)和雙軸光伏跟蹤系統(tǒng)兩種。采用單軸光伏跟蹤系統(tǒng)時(shí),光伏陣列僅可圍繞一個(gè)旋轉(zhuǎn)軸旋轉(zhuǎn),旋轉(zhuǎn)軸可采用南北方向、東西方向或與地平面垂直等布置方式;光伏陣列僅能跟蹤太陽方位角或太陽高度角的變化,因此,太陽光線入射角不能減小到零。采用雙軸光伏跟蹤系統(tǒng)時(shí),光伏陣列有兩個(gè)旋轉(zhuǎn)軸,可同時(shí)跟蹤太陽的方位角與高度角的變化,能完全跟蹤太陽運(yùn)行軌跡,使太陽入射光線始終垂直于光伏陣列。本文擬實(shí)現(xiàn)對單軸、雙軸光伏跟蹤系統(tǒng)跟蹤誤差均能自動檢測的裝置設(shè)計(jì)。
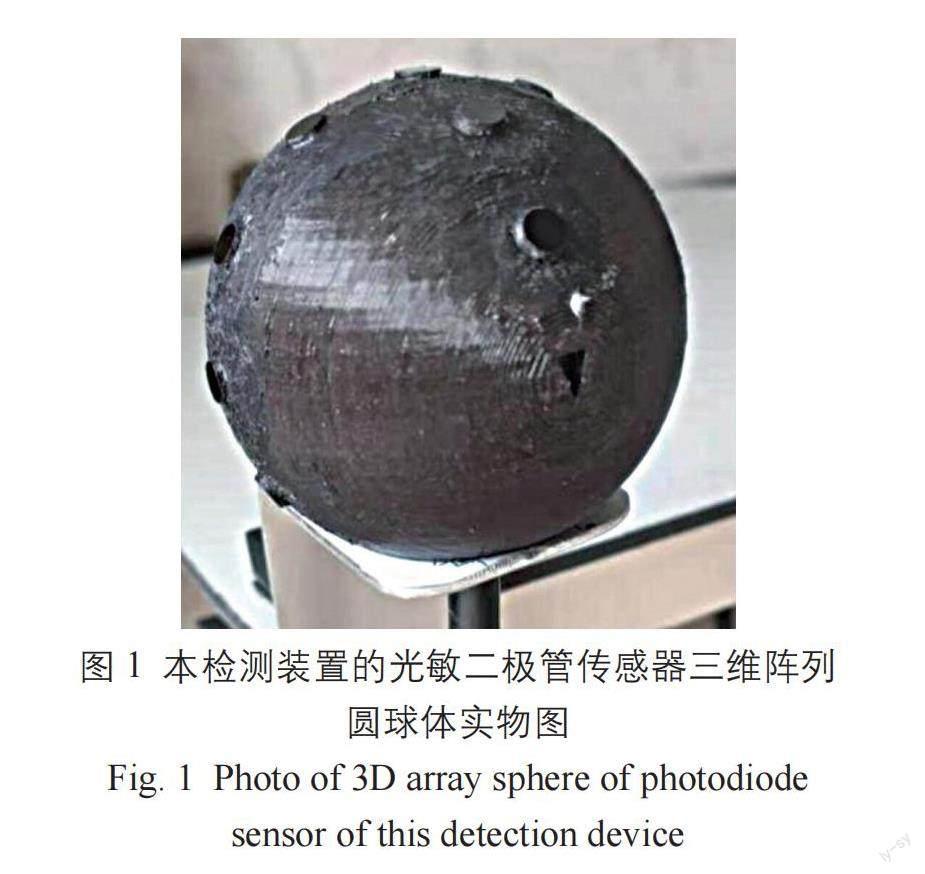
本檢測裝置的光敏二極管傳感器三維陣列圓球體實(shí)物圖如圖1所示。該裝置采用三維立體結(jié)構(gòu)的目的是提高裝置的檢測精度和靈敏度,并實(shí)現(xiàn)對單軸和雙軸光伏跟蹤系統(tǒng)跟蹤誤差的檢測。在設(shè)計(jì)的球形結(jié)構(gòu)表面間隔90°的兩條經(jīng)線上,沿弧形均勻間隔布置一定數(shù)量的光敏二極管傳感器,以保證在經(jīng)線方向和緯線方向上都達(dá)到檢測精度0.5°的目標(biāo)。有光敏二極管傳感器的兩條圓弧所在的直徑面相互垂直,且兩個(gè)直徑面均與檢測裝置的底平面垂直。
測試實(shí)驗(yàn)中,通過對不同太陽光入射角條件下檢測得到的傳感器電信號輸出進(jìn)行對比整理,形成太陽光入射角偏差值與電信號對應(yīng)表。
1.2? 跟蹤誤差檢測方法
檢測裝置包括沿緯線布置的東西方向光敏二極管傳感器,用于檢測該方向的跟蹤誤差;還包括沿經(jīng)線布置的太陽高度角光敏二極管傳感器,用于檢測南北方向的跟蹤誤差。經(jīng)、緯線相互垂直形成的光敏二極管傳感器三維陣列采集的光電信號經(jīng)信號處理、模數(shù)轉(zhuǎn)換 (AD轉(zhuǎn)換)后送至主控制器,主控制器對采集的光電信號進(jìn)行處理、判斷后輸出太陽的方位角和高度角數(shù)值[9]。
東西方向的光敏二極管傳感器陣列在水平方位上覆蓋220°夾角范圍,從東向西均勻間隔布置光敏二極管傳感器,編號為E1~E6及W6~W1。太陽高度角光敏二極管傳感器陣列以球體赤道為中心覆蓋90°夾角范圍,可均勻布置4~6個(gè)光敏二極管傳感器,當(dāng)布置4個(gè)時(shí),其由南向北的編號為Y1~Y4。
1.2.1? 東西向太陽方位角的定位計(jì)算及判斷步驟
1)粗定位:將光敏二極管傳感器E3、W3采集到的信號值分別記為VE3、VW3,對VE3、VW3差值作判斷:①若VE3–VW3>0,則說明太陽方位在東(E)側(cè),即在東至南范圍內(nèi);②若VE3–VW3<0,則說明太陽方位在西(W)側(cè),即在南至西范圍內(nèi);③若VE3–VW3=0,則說明此時(shí)太陽方位在E6和W6中間。
2)細(xì)定位:粗定位后,當(dāng)太陽方位在E或W側(cè)時(shí),進(jìn)行以下判定和計(jì)算。
①將光敏二極管傳感器E2、E4、E5采集到的信號值分別記為VE2、VE4、VE5,當(dāng)太陽方位在E側(cè)時(shí),作如下判斷。
若VE2–VE4>0,則太陽方位角θ的計(jì)算式為:
式中:θE2為光敏二極管傳感器E2測得的起始太陽方位角;20°為相鄰光敏二極管傳感器之間的固定角度。
若VE2–VE4<0,則太陽方位角的計(jì)算式為:
式中:θE4為光敏二極管傳感器E4測得的起始太陽方位角。
②當(dāng)太陽方位在W側(cè)時(shí),太陽方位角的判斷方法與太陽方位在E側(cè)時(shí)的判斷方法相同。
1.2.2? 南北向太陽高度角的定位計(jì)算及判斷步驟
將光敏二極管傳感器Y2、Y3采集到的信號值分別記為VY2、VY3;光敏二極管傳感器Y1、Y4分別位于南回歸線、北回歸線一側(cè),其采集到的信號值分別記為VY1、VY4。比較VY2、VY3的大小,對差值作如下判斷:
1)若VY2–VY3=0,則太陽高度角θY位于赤道中間;
2)若VY2–VY3>0,則太陽高度角的計(jì)算式為:
式中:θY2為光敏二極管傳感器Y2測得的起始太陽高度角。
3)若VY2–VY3<0,則太陽高度角的計(jì)算式為:
式中:θY3為光敏二極管傳感器Y3測得的起始太陽高度角。
1.2.3? 計(jì)算結(jié)果處理
主控制器計(jì)算得到東西方向太陽方位角跟蹤誤差值和南北方向太陽高度角跟蹤誤差值,并輸出至顯示器和數(shù)據(jù)存儲器。
2? 本檢測裝置的實(shí)現(xiàn)及校準(zhǔn)
本檢測裝置需具有單/雙軸檢測功能切換、采樣周期(秒、分鐘、小時(shí))切換、暫停采樣、數(shù)據(jù)顯示、數(shù)據(jù)輸出等功能。
2.1? 主控制系統(tǒng)功能的設(shè)計(jì)
主控制系統(tǒng)主要包括主控制器及信號處理部分、人機(jī)交互模塊。主控制器及信號處理部分主要由ARM處理器及數(shù)字參數(shù)存儲等模塊構(gòu)成。主控制器采用型號為STM32F103的芯片,其可實(shí)現(xiàn)數(shù)據(jù)采集后的信號處理、AD轉(zhuǎn)換、結(jié)果顯示和外部數(shù)據(jù)存儲等功能。
人機(jī)交互模塊包含系統(tǒng)校準(zhǔn),單軸、雙軸設(shè)置,采集時(shí)間設(shè)置等。其數(shù)據(jù)接口通信方式為USB2.0,存儲介質(zhì)為SD卡可移動存儲。該模塊可視化顯示提供的數(shù)據(jù)信息有:單/雙軸模式、偏東/偏西跟蹤誤差的檢測結(jié)果數(shù)值、偏南/偏北跟蹤誤差的檢測結(jié)果數(shù)值。主控制器同時(shí)接收主控面板上幾個(gè)切換工作模式(單軸、雙軸等的選擇、采樣周期設(shè)置等)的信息。
主控制系統(tǒng)的功能示意圖如圖2所示。
2.2? 主控制系統(tǒng)軟件的工作流程
利用光敏二極管傳感器檢測得到的數(shù)據(jù),結(jié)合檢測裝置的單軸、雙軸功能切換需求,設(shè)計(jì)如圖3所示的主控制系統(tǒng)軟件工作流程,逐一實(shí)現(xiàn)光敏二極管傳感器初始化、檢測裝置算法處理、數(shù)據(jù)存儲、檢測結(jié)果可視化等功能。
2.3? 本檢測裝置校準(zhǔn)方案及實(shí)現(xiàn)
由于存在加工誤差、元器件參數(shù)不一致等問題,需對光敏二極管傳感器、信號放大器、AD轉(zhuǎn)換器及偏轉(zhuǎn)角度計(jì)算模塊等進(jìn)行校準(zhǔn)及精度檢測,因此搭建檢測裝置校準(zhǔn)平臺,該校準(zhǔn)平臺的示意圖如圖4所示。
校準(zhǔn)方案的步驟為:
1)在暗室內(nèi)的一個(gè)標(biāo)準(zhǔn)光學(xué)平臺上固定安裝本檢測裝置,并同光學(xué)平臺處于同一水平面內(nèi)。
2)用兩臺激光水平儀在光學(xué)平臺上交叉出兩個(gè)相互垂直的光面,標(biāo)識出如圖4所示的兩個(gè)垂直光面的交叉垂直線。將光源球、檢測裝置放在該垂直線上,并保證二者的上下中心點(diǎn)垂直對準(zhǔn),此時(shí)光源中心點(diǎn)在檢測裝置的正上方,模擬太陽在傳感器正上方90°,用來對傳感器進(jìn)行垂直方向(南北方向)的初始角度誤差的測量、標(biāo)定。
3)采用與步驟2)相近的方法,將光源球精確定位在光學(xué)平臺的0°水平位置,對傳感器進(jìn)行東西方向的初始角度誤差測量、標(biāo)定。
4)以上初始值校準(zhǔn)結(jié)果可通過主控制系統(tǒng)軟件進(jìn)行校準(zhǔn)歸零,從而保證傳感器和檢測裝置測量的一致性。
傳感器標(biāo)定用激光水平儀的參數(shù)如表1所示。
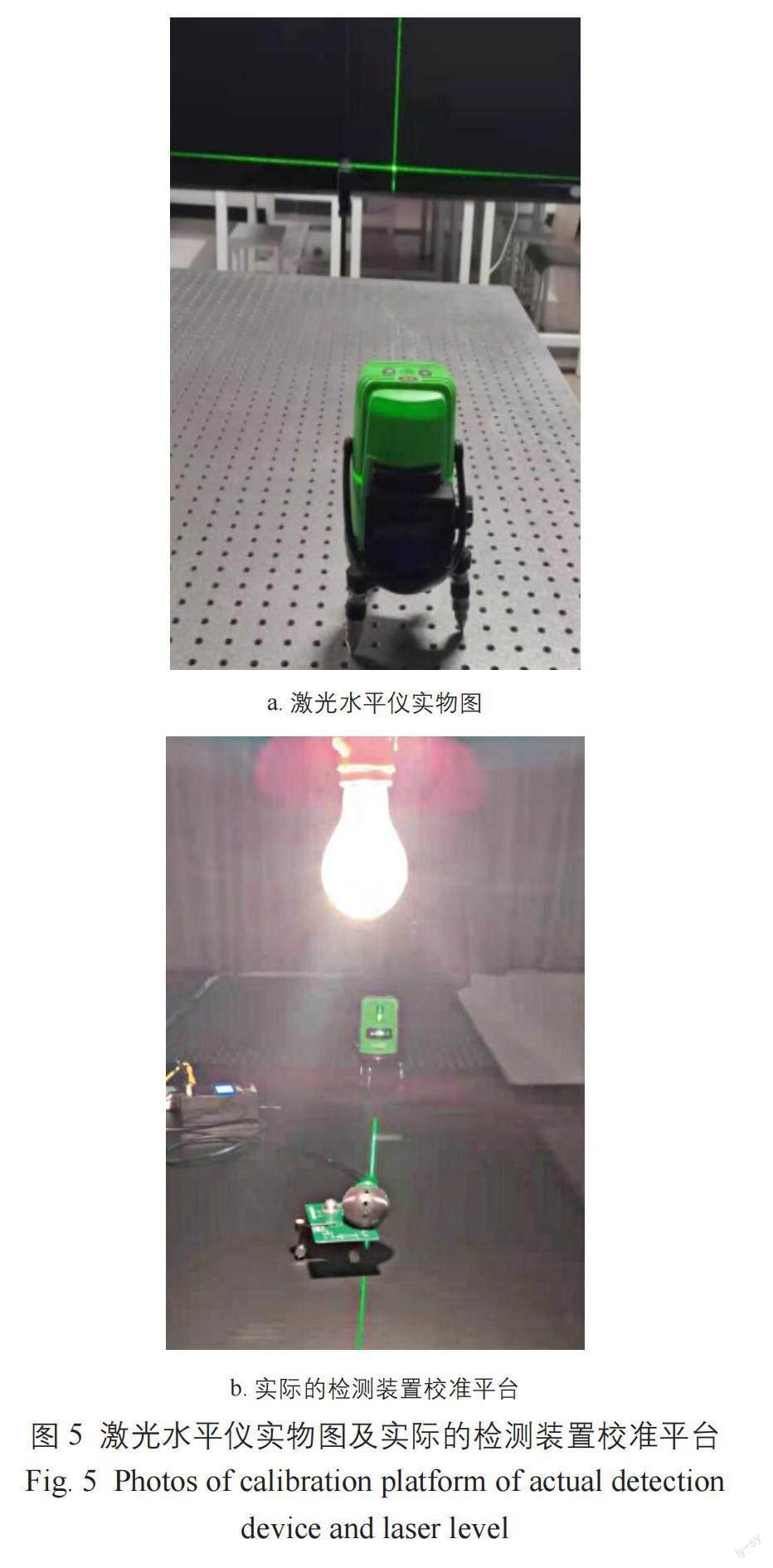
將表1中正交精度指標(biāo)3 m ±1 mm轉(zhuǎn)換成角度表示,即,或arctan(1/3000)≈0.02°。同樣,將水平、垂直精度指標(biāo)5 m ±1 mm轉(zhuǎn)換成角度表示,即,或arctan(1/5000)≈0.013°。由此可知,激光水平儀水平、垂直、正交精度都在0.02°以下,滿足檢測裝置0.1°~0.5°檢測精度的要求。激光水平儀實(shí)物圖及實(shí)際的檢測裝置校準(zhǔn)平臺如圖5所示。
經(jīng)過搭建的檢測裝置校準(zhǔn)平臺的校準(zhǔn)后,達(dá)到對傳感器的標(biāo)定,消除了檢測裝置試制過程中的加工偏差,保證了后續(xù)實(shí)驗(yàn)結(jié)果的一致性。
3? 檢測裝置實(shí)驗(yàn)
為測試光伏跟蹤誤差檢測裝置,本文采用兩種不同應(yīng)用場景進(jìn)行實(shí)驗(yàn)。一種場景是在地面固定平臺下進(jìn)行的太陽方位角靜態(tài)檢測實(shí)驗(yàn),檢測裝置處于相對地面靜止不動的狀態(tài),以檢測太陽運(yùn)行過程中檢測裝置的數(shù)據(jù)輸出,標(biāo)定檢測裝置數(shù)據(jù)輸出基準(zhǔn),判斷其能否達(dá)到預(yù)期誤差檢測精度。另外一種場景則是在真實(shí)的雙軸光伏跟蹤系統(tǒng)上固定檢測裝置,完成雙軸光伏跟蹤系統(tǒng)在跟蹤條件下的跟蹤誤差動態(tài)檢測,對應(yīng)輸出跟蹤誤差檢測結(jié)果,并根據(jù)檢測結(jié)果進(jìn)行檢測精度判別。
3.1? 固定平臺下太陽方位角靜態(tài)檢測實(shí)驗(yàn)
在太陽日照條件較穩(wěn)定的室外環(huán)境下,將本檢測裝置固定在地平面,檢測一定時(shí)間周期內(nèi)太陽自然運(yùn)轉(zhuǎn)時(shí)引起的檢測角度偏差值變化,以驗(yàn)證是否達(dá)到預(yù)期的角度變化檢測精度。實(shí)驗(yàn)分為兩個(gè)測試方向,先開展東西方向上的角度偏差檢測測試,然后開展南北方向上的角度偏差檢測測試。
3.1.1? 東西方向太陽光入射角檢測測試
以固定平臺(地面)為基礎(chǔ),利用本檢測裝置測試太陽光入射角,用于反映太陽方位角隨時(shí)間的變化情況。將檢測裝置放置在太陽光下某個(gè)固定平面上,觀察測量得到太陽光入射角變化的情況。選取測試當(dāng)天09:57~14:07時(shí)間段檢測裝置得到的東西方向太陽光入射角結(jié)果,具體如圖6所示。圖中:正值表示太陽方位偏東,負(fù)值表示太陽方位偏西。
從圖6可以看出:在測試當(dāng)天,11:20之前太陽方位偏東;受檢測裝置擺放位置的地平面限制,在11:20之后,太陽方位角出現(xiàn)反轉(zhuǎn),太陽方位由偏東轉(zhuǎn)向偏西。
隨著太陽自然移動,記錄各時(shí)間點(diǎn)東西方向太陽光線入射角數(shù)據(jù),并與實(shí)測數(shù)據(jù)進(jìn)行對比,發(fā)現(xiàn)檢測裝置的測試結(jié)果滿足設(shè)計(jì)精度要求。
3.1.2? 南北方向太陽光入射角檢測測試
同樣采用固定平臺的方式,測試環(huán)境與東西方向測試時(shí)相同,在09:57~14:07測試時(shí)間段內(nèi),對檢測裝置測得的南北方向太陽光入射角數(shù)據(jù)進(jìn)行了統(tǒng)計(jì)記錄,得到南北方向的太陽光入射角曲線如圖7所示。
將記錄的各時(shí)間點(diǎn)南北方向太陽光入射角數(shù)據(jù)與實(shí)測數(shù)據(jù)進(jìn)行對比,發(fā)現(xiàn)檢測裝置的測試結(jié)果滿足設(shè)計(jì)精度要求。
3.1.3? 靜態(tài)檢測結(jié)果
通過上文東西方向和南北方向兩個(gè)測試方向的靜態(tài)檢測實(shí)驗(yàn),完成了對檢測裝置中的傳感器在雙軸兩個(gè)不同方向上的檢測精度驗(yàn)證,保證檢測裝置在設(shè)計(jì)測量范圍內(nèi),都能針對外界光線角度的微小變化輸出對應(yīng)的檢測結(jié)果,從而保證在實(shí)際現(xiàn)場的單軸、雙軸光伏跟蹤系統(tǒng)的跟蹤誤差動態(tài)檢測的可靠性。
3.2? 單軸、雙軸光伏跟蹤系統(tǒng)的跟蹤誤差動態(tài)檢測實(shí)驗(yàn)
在靜態(tài)檢測實(shí)驗(yàn)基礎(chǔ)上,將本檢測裝置固定在真實(shí)的采用單軸或雙軸光伏跟蹤系統(tǒng)的光伏組件上,保證傳感器底面平行于光伏組件玻璃板面,完成真正的在跟蹤條件下的跟蹤誤差動態(tài)檢測。選定單軸或雙軸跟蹤模式,實(shí)現(xiàn)戶外環(huán)境中的測試驗(yàn)證。本次實(shí)驗(yàn)以雙軸跟蹤模式為例,在太陽光照射下,隨著動態(tài)檢測平臺的追日運(yùn)動,觀察檢測裝置隨著太陽移動時(shí)檢測輸出的太陽方位角及高度角跟蹤誤差結(jié)果,通過可視化電子屏幕輸出測試數(shù)據(jù)。圖8為某個(gè)測試瞬間的輸出結(jié)果案例。
檢測實(shí)驗(yàn)過程中,隨著動態(tài)檢測平臺的追日轉(zhuǎn)動運(yùn)行,本檢測裝置檢測到跟蹤系統(tǒng)在東西向的跟蹤誤差較小,僅為0.13°,而南北向跟蹤動作則有6.60°跟蹤誤差。檢測裝置實(shí)現(xiàn)了對光伏跟蹤系統(tǒng)在經(jīng)線與緯線方向跟蹤精度的檢測目的,輸出的跟蹤誤差最小角度單位為小數(shù)點(diǎn)后兩位。
切換單軸、雙軸檢測類別,即可以同樣的方式完成單軸光伏跟蹤系統(tǒng)的跟蹤誤差檢測。
4? 結(jié)論
本文針對光伏跟蹤系統(tǒng)的現(xiàn)場檢測需求,設(shè)計(jì)了一種基于光敏二極管傳感器三維陣列的光伏跟蹤誤差檢測裝置,并進(jìn)行試制,實(shí)現(xiàn)了對單軸、雙軸光伏跟蹤系統(tǒng)的跟蹤誤差、跟蹤范圍的實(shí)時(shí)檢測分析,有利于在實(shí)際應(yīng)用中提高現(xiàn)場運(yùn)維人員對光伏跟蹤系統(tǒng)運(yùn)行狀態(tài)與質(zhì)量的掌握,了解設(shè)備運(yùn)行偏差,現(xiàn)場檢查光伏跟蹤系統(tǒng)設(shè)備在存在偏差時(shí)的運(yùn)行情況,提高設(shè)備可利用率,最終實(shí)現(xiàn)光伏電站發(fā)電量提升的目標(biāo),具有較好的工程應(yīng)用推廣價(jià)值。
[參考文獻(xiàn)]
[1] 王永中.碳達(dá)峰、碳中和目標(biāo)與中國的新能源革命[J].人民論壇·學(xué)術(shù)前沿,2021(14):88-96.
[2] 賈君. 以習(xí)近平生態(tài)文明思想引領(lǐng)東北碳達(dá)峰碳中和工作[N]. 中國環(huán)境報(bào),2021-08-09(003).
[3] 《農(nóng)村電工》編輯部. 國家電網(wǎng)公司發(fā)布“碳達(dá)峰、碳中和”行動方案[J]. 農(nóng)村電工,2021(5):3.
[4] 中國電力企業(yè)聯(lián)合會.光伏電站太陽跟蹤系統(tǒng)技術(shù)要求:GB/T 29320—2012 [S]. [S. l.:s.n.],2012.
[5] 閆云飛,張智恩,張力,等.太陽能利用技術(shù)及其應(yīng)用[J].太陽能學(xué)報(bào),2012,33(S1):47-56.
[6] 李晶,竇偉,徐正國,等.光伏發(fā)電系統(tǒng)中最大功率點(diǎn)跟蹤算法的研究[J].太陽能學(xué)報(bào),2007(3):268-273.
[7] 馬桂龍,付青,陳淑華.基于自適應(yīng)預(yù)測算法的光伏系統(tǒng)MPPT技術(shù)研究[J].太陽能學(xué)報(bào),2012,33(12):2062-2067.
[8] 張海,韓春成,王斌,等.基于平頂錐形傳感器的光伏組件方位檢測系統(tǒng)[J].中國農(nóng)機(jī)化學(xué)報(bào),2015,36(6):281-285.
[9] 王金平,王軍,張耀明,等. 槽式太陽能聚光器跟蹤系統(tǒng)運(yùn)行特性分析[J]. 太陽能學(xué)報(bào),2016,37(12):3125-3131.
PV tracking error detection based on 3D array of photodiode sensors
Tang Zipeng1,Wei Chao1,Shangguan Xuanshuo1,Zhang Jun1,He Ziyu1,Xu Yaohua2
(1. Huadian Electric Power Research Institute Co., Ltd., Hangzhou 310030,China;
2. Anhui University,Hefei 230601,China)
Abstract:PV tracking system can improve the power generation efficiency of PV power generation system. However,due to the instability of the operating mechanism and motion control algorithm of the PV tracking system,its operation effect is often not ideal,and the tracking accuracy is difficult to guarantee. In order to realize the on-site detection of the tracking error of the PV tracking system,this paper designs a PV tracking error detection device based on the 3D array of photodiode sensors. The device mainly includes a spherical body composed of multiple photodiode sensors reqularly inlaid in a 3D array and the main control system;A sensor calibration scheme based on the laser level is designed to realize the correction of the initial value deviation of the sensor,improve the consistency of the detection device,and realize the automatic detection of the tracking error of the single-axis or doute-axis PV tracking system. After the trial production and test verification of the equipment,the results show that the detection device can meet the tracking error detection accuracy requirements of the PV tracking system,and can accurately detect the tracking error of the single-axis or double-axis PV tracking system under different conditions online.
Keywords:PV tracking system;tracking error;photodiode sensor;3D array;initial value calibration;detection
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48