植物保護施藥技術創新與裝備智能化的研究現狀與展望
2023-10-27 03:11:18閆曉靜楊代斌袁會珠
現代農藥 2023年5期
關鍵詞:作業
魏 鵬,閆曉靜,徐 軍,楊代斌,袁會珠
(中國農業科學院植物保護研究所,北京 100193)
2021年中國農業農村部等六部委印發的《“十四五”全國農業綠色發展規劃》指出,我國主要農作物的農藥利用率到2025年需要從2020年的40.6%提升至43%。2023年2月,中共中央國務院發布《關于做好2023年全面推進鄉村振興重點工作的意見》,進一步指出,要加快建設農業強國,推進農業綠色發展,加快農業投入品減量增效技術的推廣應用。由此可見,人們對健康美好生活的不斷向往和社會的發展對農藥施用等提出了更高的要求,但目前我國大部分地區仍舊采用大面積、大容量的植保施藥方法,施藥量不合理等問題導致的環境污染與農藥殘留超標等問題十分嚴峻。
隨著精準農業理念(圖1)的提出與實踐[1],人工智能等各種數字化技術不斷涌現,植保技術與裝備均得到了極大的發展。其中,植保施藥技術的創新及其裝備的智能化已成為實現農藥減施增效的重要途徑[2]。本文以植保施藥技術的創新與藥械裝備的智能化兩個方面作為切入點,分析國內外學者在該領域的研究現狀,并對其存在的難題和未來的發展進行探討。
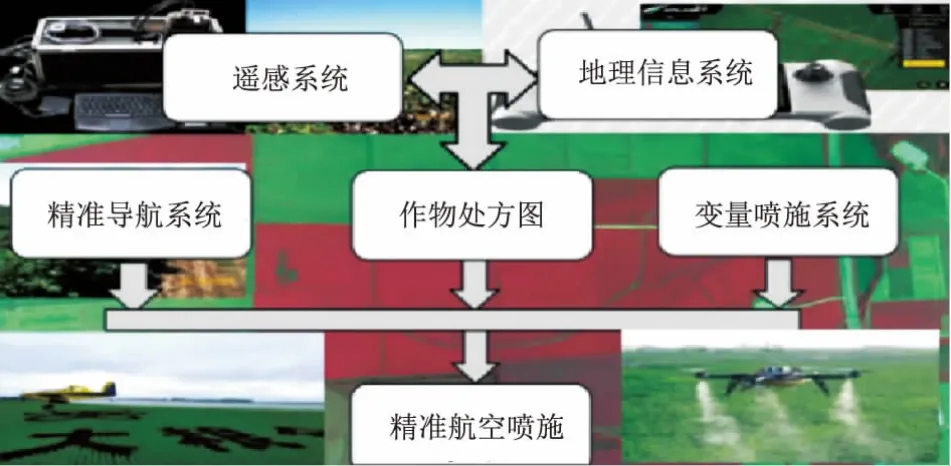
圖1 精準農業架構
1 植保施藥技術的創新
植保施藥技術的創新旨在實現農藥的減施增效,即降低成本、減少環境污染和藥物殘留的目的。目前,該技術領域的創新涉及用藥量、混藥、施用過程等各環節的優化,主要包括精準變量施藥技術、精準在線混藥技術、精準對靶施藥技術、物理場輔助施藥技術和噴霧飄移控制技術。此外,植保用藥與生物防控技術的多元化發展,也在不斷推動植保技術的相應進步。
1.1 精準變量施藥技術
精準變量施藥技術是按照作物病蟲草害的發生程度和生長狀況,將已獲取的田間信息處理生成用藥決策,并通過調節施藥控制系統參數實現變量施藥的方法。該技術的實現主要分為施藥決策的生成與決策執行兩個方面。前者主要分為建立融合地理信息的處方圖和傳感器信息的實時解譯兩部分;后者主要在于施藥系統的傳感器類型、變量施藥控制方法與算法上的差異。該技術的具體分類與內容如表1所示。
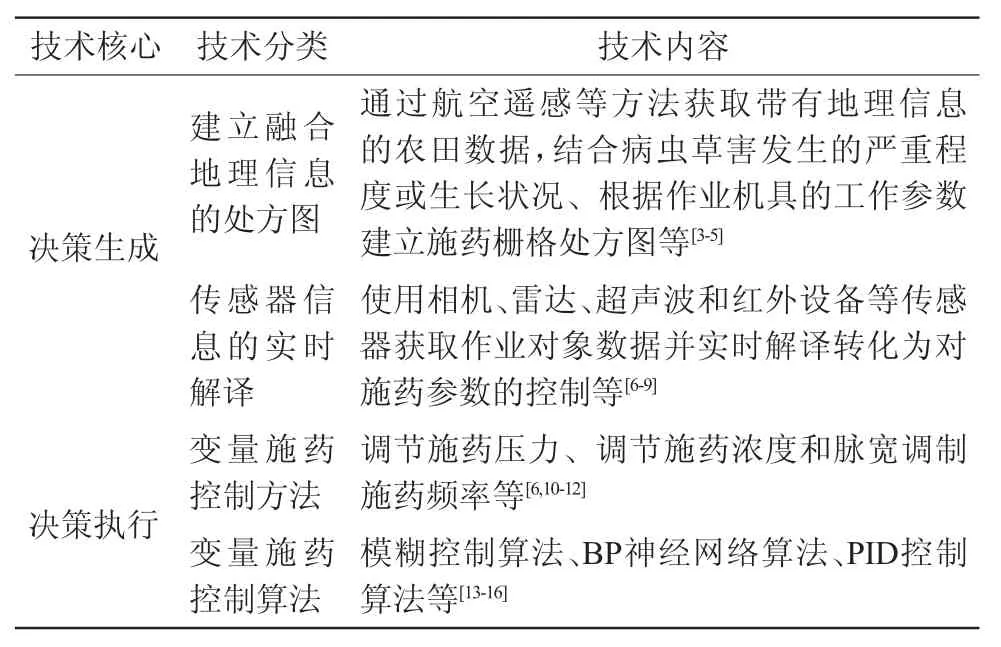
表1 精準變量施藥技術
精準變量施藥技術按需用藥的理念有效降低了農藥的使用量,進一步減少了資源的浪費和環境的污染。閆春雨等[3]使用無人機搭載多光譜相機獲取噴施棉花脫葉劑前后4次的田間數據建立最優監測模型,分別生成作業處方圖指導施藥(圖2),節約農藥7.39%;Nan等[4]使用CMAC-PID仿形跟蹤算法建立了基于樹冠體積與葉面積密度的噴施流量計算方法,與常規室外噴施相比,該方法可使冠層內外噴霧變異系數分別降低25.9%和21.9%,地面沉積覆蓋率平均值降低20.2%。

圖2 精準變量施藥處方圖
盡管精準變量施藥技術已經有了長足的發展,但在實際應用中仍存在部分難題有待解決。在施用量決策生成方面,獲取的農田信息會存在偏差,造成處理和分析的結果誤判,同時缺少用于處方圖建立與施藥量解譯的病蟲草害發生程度量化判別的統一標準;決策執行方面存在變量控制延時、工作參數不穩定等問題。
1.2 精準在線混藥技術
精準在線混藥技術是將藥劑與水獨立存放,在施藥作業時按照用藥所需濃度實時在線混配后施用的方法[17]。現有的混藥方式主要有直注式、旋動式和射流式3種,如表2所示。
精確在線混藥技術可解決預混式配藥的混藥不均、用藥濃度無法根據變量施藥需求實時改變等問題,減少了施藥人員與農藥的直接接觸。混藥方式和混藥器的設計與優化是影響混藥配比效率、質量的關鍵。理論方面,房開拓等[20]以非彈性介質的動量計算為切入點,通過理論推導、仿真與試驗相結合的方法,總結出一組用于射流式混藥器設計分析的特性方程;結構方面,宋海潮等[21]通過優化混藥器內部繼旋器、收縮管、擴散管、分流器等結構(圖3),實現了脂溶性農藥與水的均勻混合。

圖3 3D 打印制作的混藥器
目前精準在線混藥技術存在實時變量施藥與在線混藥之間的延時、不同類型藥劑在混藥器中混藥效果有差異等問題,需要進一步優化混藥結構,改進混藥工作參數,提高混藥效果。
1.3 精準對靶施藥技術
精準對靶施藥技術是精準變量施藥技術的基礎。變量施藥前,農機需要準確獲取施藥靶點或區域,然后根據病蟲草害的發生程度進行變量施藥。精準對靶施藥技術的關鍵在于目標物的檢測,目前已有紅外線、超聲波、激光雷達、機器視覺、光譜成像和多傳感器融合等檢測方法[22],如表3所示。
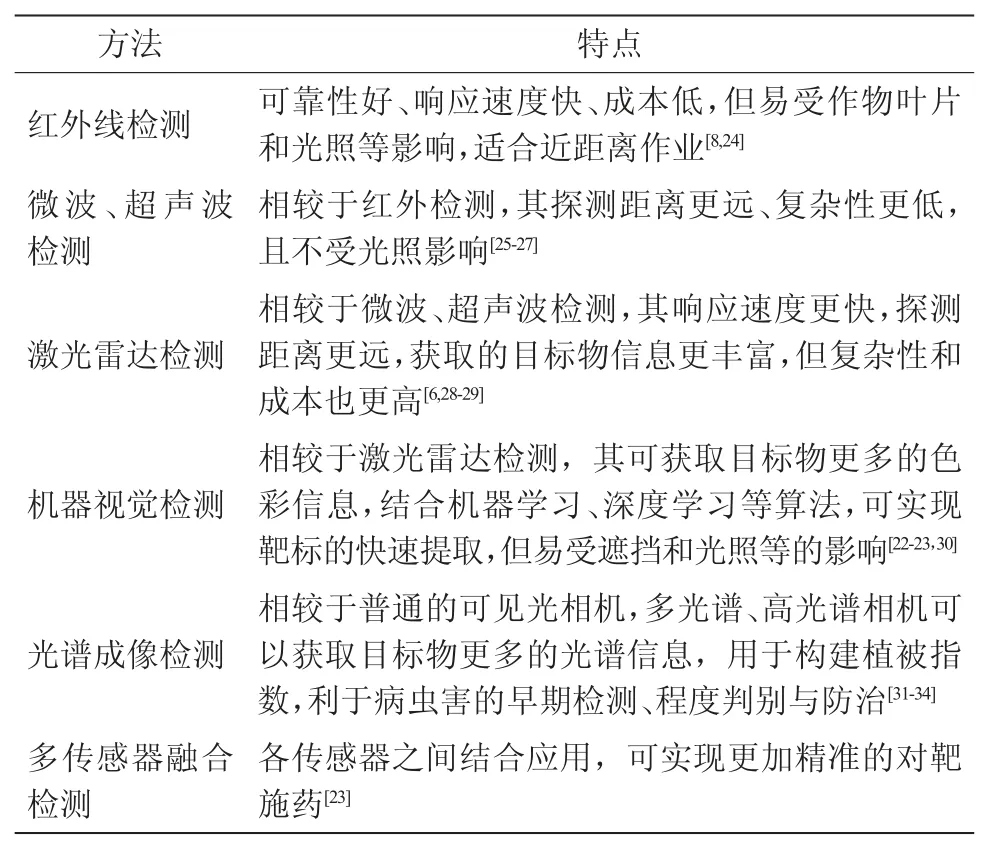
表3 目標物對靶檢測方法
精準對靶施藥技術進一步減少了藥劑的用量,Partel等[23]使用多傳感器融合檢測施藥靶標并分類、變量噴施,有效減少了28%的施藥量。圖4為作業機具對靶變量噴施的施藥處方圖與作業軌跡[23]。但該技術在靶標識別方面仍需要進一步提高傳感器識別效率、減少施藥延時、提升檢測準確性以及提高對靶定位精度等。
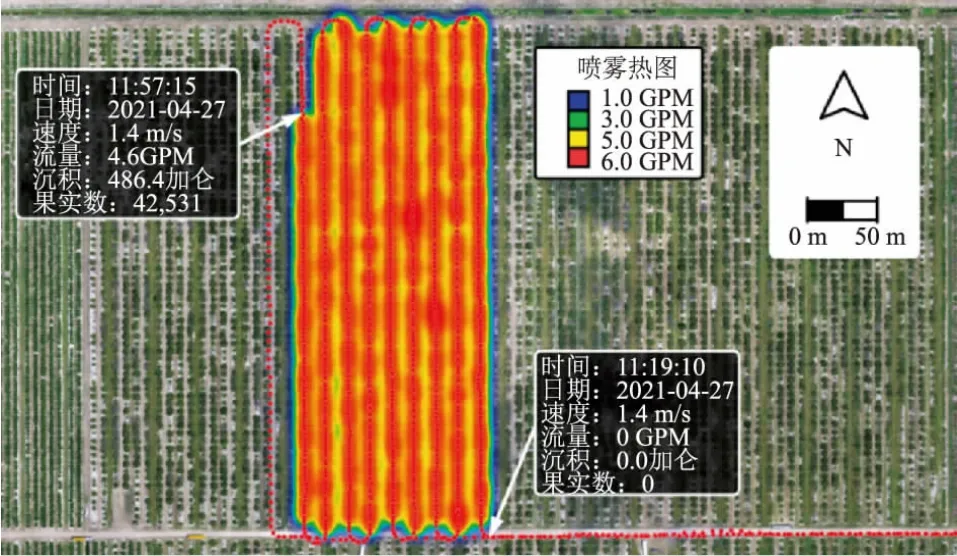
圖4 多傳感器融合檢測對靶變量噴施作業軌跡與處方圖
1.4 物理場輔助施藥技術
物理場輔助施藥技術是通過在施藥機具與靶標之間建立特定的物理場以進一步優化施藥效果的方法。用于輔助施藥技術的物理場主要包括磁場、電場、熱場、風場、超聲場[35],其特點和優勢如表4所示。
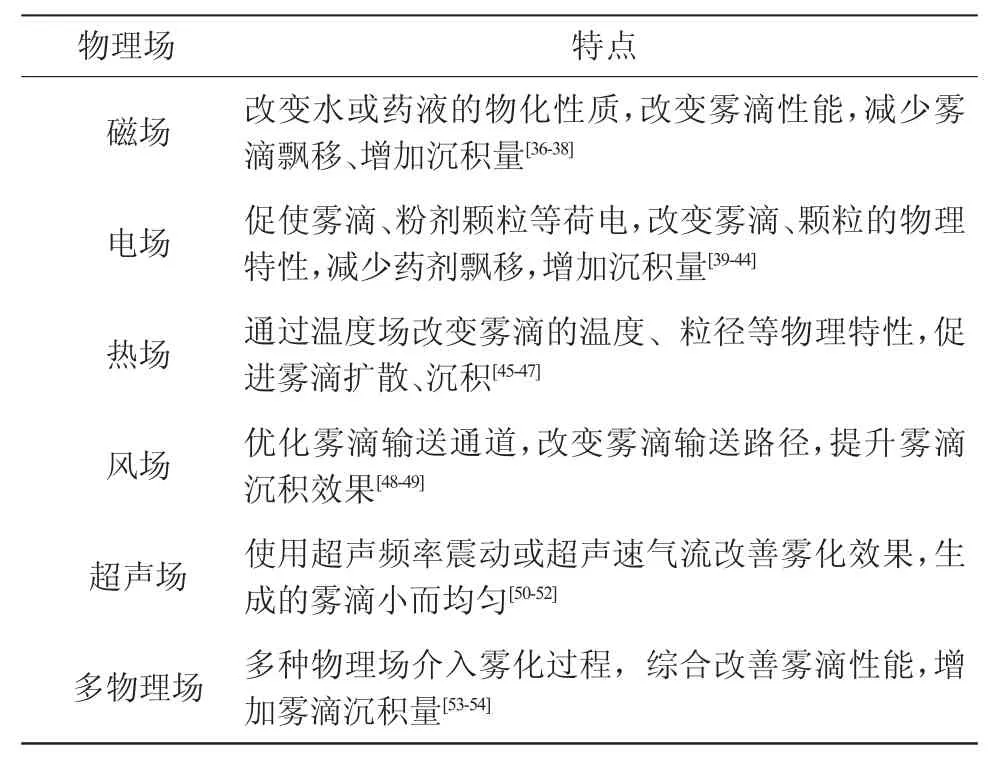
表4 輔助施藥的物理場
物理場介入藥劑噴施過程可進一步改善藥劑霧滴、顆粒的性能,提升沉積量。Zhao等[39]設計了應用于航空植保施藥的靜電霧化噴施系統(圖5),使得靶標正面的液滴沉積密度增加了16.7%,靶標背面的液滴沉積量提升約4倍;Mucha-Pelzer等[55]通過不同的方法施用硅粉藥劑進行黑葉螺、菜粉蝶防控效果影響試驗,結果發現,靜電輔助噴施AL-06-109粉劑的效果最佳,與傳統手動施藥方式相比提升了54%;Moges等[36]使用安裝磁化系統的TeeJetXR110015型噴嘴噴霧器開展甘蔗田施藥試驗,與常規噴施結果相比,磁化輔助施藥可大幅減少霧滴飄移,作物頂部的沉積量可增加12.1%~41.5%,中部可增加40.6%~65.0%。
物理場輔助施藥技術的推廣應用仍存在較多難題,主要在于物理場對霧滴生成、沉降和沉積過程的影響機理不清晰,物理場調控霧化噴施霧滴物化性質的工作參數不明確,田間試驗的可重復性與普適性較差。
1.5 噴霧飄移控制技術
飄移是指向靶標沉降的農藥霧滴受環境氣流影響而向非靶標區域運動的現象。影響霧滴飄移的因素主要分為兩方面,一方面為自然風與作業機具風場耦合的環境氣流,另一方面是藥滴粒徑、動量等自身特性[17]。目前,噴霧飄移控制技術主要有改進噴嘴結構、優化噴施風場、防飄助劑研發、建立飄移風險預測和控制模型等方法。
噴嘴結構改進方面,研究集中于設計使用防飄噴頭的方法,主要包括氣吸型、文丘里型等[17]。馮玉茹等[56]使用文丘里防飄噴頭開展了水稻紋枯病的防治效率檢測試驗,與常規扇形噴頭相比,防治效果提升30%;Homer等[57]在葡萄園多年生雜草的防治試驗中對比使用了多款防飄移噴嘴,與AI(air injection)型相比,DG(drift guard)型防飄噴嘴不僅可以產生更小的霧滴,而且飄移量更少。
噴施風場優化方面,研究集中于設計使用強制風場和風幕的方法。劉昶希等[48]開展了使用錐形風場式防飄噴施裝置的強制輔助氣流防飄移特性研究,通過建立單霧滴運動模型和CFD仿真分析優化了防飄裝置,使得多因素正交試驗建立的豎直和水平方向總霧滴飄移量占比的數學模型顯著性較高(P<0.05,R2分別為0.934、0.945);梁昭[58]結合模糊控制策略、雙峰分布霧滴飄移沉積模型,使用最小二乘支持向量機對風速均值進行預測,建立了基于風幕防飄系統的智能控制系統,與傳統風幕系統相比,在模擬橫向自然風的條件下,其風幕系統的沉積量可提高29.53%。
防飄助劑研發方面,研究集中于開發能夠輔助生成減少風場脅迫,分布均勻性更好且具有更高覆蓋密度、沉積量霧滴群的藥劑。張海艷等[59]以霧滴在作物葉片表面的碰撞模型和霧滴攔截模型為基礎,建立了用于植保無人機施藥霧滴黏附量分析預測的模型,并開展了助劑對藥液性質、霧化效果、霧滴沉積特征的影響試驗,與清水相比,添加1%邁飛與0.5%邁圖Target助劑溶液可使得每公頃水稻田的霧滴黏附量分別增加800.78%和1 051.49%。為分析助劑對藥液防治效果的影響,鄭發嬌等[60]通過開展4.5%聯苯菊酯水乳劑1 000、1 500、2 000倍液分別添加0.1%有機硅表面活性劑Silwet 408、礦物油、滲透劑JFC-2助劑的室內外試驗發現,與未添加助劑相比,各濃度的4.5%聯苯菊酯水乳劑添加助劑后的田間藥液持留量增加了15.22%~41.96%,田間防效增加了5.26%~30.03%。
飄移風險模型探索方面,主要集中于飄移風險預測和控制模型的探究。鄒雄等[61]以多相流理論與質點運動學方法為基礎,分析了霧滴直徑、初始速度,風速與無人機飛行高度、速度對霧滴飄移的影響,證明霧滴的飄移距離與噴施霧滴的初始速度角度呈二次函數分布,特定條件下,霧滴初始速度角度為20°時的霧滴飄移距離最短。倪佳勝等[62]結合CFD仿真模擬與風動試驗數據,建立了氣流速度、噴施高度和霧滴粒徑對霧滴飄移距離影響的多元線性回歸模型,該模型對霧滴飄移量的預測精度可達83.9%;孫道宗等[63]開展了不同風速和噴頭傾斜角度下噴霧霧滴飄移影響的試驗(圖6),通過分析水平、垂直兩維度上的霧滴質量分布與變異系數,建立了側風風速與噴施角度對霧滴飄移影響的模型,并計算了不同風速下的最佳補償噴施傾斜角度。

圖6 霧滴飄移補償試驗
1.6 施藥的多元化發展
除農藥施用方法外,農藥制劑產品的質量和性能也會直接決定病蟲草害的防治效果。隨著人們對農產品質量安全和生態環境要求的不斷提高,農藥的發展正在加速步入高效、低毒、綠色的新階段;農藥制劑產品的研發更加多元化、精細化和功能化[64]。多元化方面,農藥制劑根據分散程度可分為均相與非均相體系。前者主要包括可溶劑、微乳劑、可分散液劑和乳油等;后者主要包括懸浮劑、水乳劑和納米乳劑等。精細化方面,為優化藥劑在霧化、沉積和傳輸等過程中的性能,相應地研發出配套的表面活性劑、增稠劑和各類油劑等農藥助劑。功能化方面,為進一步提升不同施藥場景下農藥應用的需求,已研發出種衣劑、微囊緩控釋制劑、納米制劑、省力化制劑和藥肥等[64-66]。
農作物病蟲草害的綠色防治是農業可持續發展的重要途徑。綠色防治技術主要包括生物天敵防控技術、誘捕誘殺技術等。Nayak等[67]在苦瓜田采用害蟲綜合誘殺方法進行連續3年的果蠅防控試驗,結果發現,綜合蟲害管理可有效減少約76%的蟲害損失。劉萬才等[68]根據水稻田二化螟發育進度,使用植保無人機分次集中投放赤眼蜂進行生物防控,結果顯示稻螟赤眼蜂與螟黃赤眼蜂的防控效果分別達83.22%、80.05%,在不施藥的情況下實現了水稻二化螟的有效控制。
為滿足農藥制劑與綠色防控技術多元化發展帶來的植保施藥需求,施藥器械也在不斷創新與改進。例如,為滿足赤眼蜂的精準投放,大量學者對投放平臺、投放器和投放方法不斷進行優化,進一步促進了生物防控技術在植保領域的推廣應用[69];為滿足顆粒類藥肥載體、包覆種衣劑的作物種子等固體的精準變量撒播,大量學者通過優化控制算法、控制機構、監測方法等不斷改進條播、離心撒播等設備及其性能,提升顆粒撒施過程中的沉積分布效果[70-71]。
2 農業植保裝備的智能化
農業植保施藥作業分為人工施藥、機械化施藥、自動化施藥和智能化施藥4個發展階段。隨著人工智能等新興技術的迅速發展,農機裝備的智能化、智慧化程度得到顯著提升,降低農業勞動力成本的同時,進一步提高了農業植保施藥的效率和安全性[72-73]。現階段,農業植保施藥裝備的智能化主要集中于智能農機的自主作業軌跡規劃與導航、自主避障運行與遠程在線監管三方面。
2.1 自主作業軌跡規劃與導航
傳統的農業植保施藥方式不僅勞動成本高,而且對工作人員存在著巨大的暴露風險[74]。智能農機裝備的開發與應用進一步提高了農業的管理效率與安全性[73]。智能農機自主作業軌跡規劃主要分為全區域覆蓋植保施藥與目標識別對靶精準導航施藥作業兩種。前者主要應用于小麥、玉米等大面積、高密度種植農田的植保施藥;后者主要應用于丘陵果園、溫室等種植場景。王偉等[75]通過作業區域劃分、改進蟻群算法確定區域遍歷順序與簡化廣度優先搜索(breadth first search,BFS)算法確定區域遍歷銜接路徑的方法優化了農田全區域覆蓋作業的效率,路徑重復率相較于傳統的蟻群與BFS算法降低了44%;Chen等[30]結合無人機遙感、嵌入式硬件開發和邊緣計算等技術,設計了應用于丘陵果樹精準對靶噴施的植保系統,規劃所得施藥航線相較于基于海拔規劃的航線可減少19%的航程。
農機自主導航作業主要通過機器視覺、激光雷達和衛星定位等方法實現。機器視覺方面,主要通過地面斜向視角和航空全局視角提取農機導航參考數據;激光雷達方面,主要通過SLAM等方法建立農機導航作業環境;衛星定位方面,主要通過衛星以數據無線傳輸方法向聯網農機傳遞地理信息完成導航。張彥斐等[76]對比使用多種機器學習算法提取無人機搭載多光譜相機獲取的果樹影像,并使用感興趣區域劃分與特征點擬合的方法提取果樹行導航線,與人工擬合參考線相比,平均角度偏差僅為0.597 5°;Gasparino等[77]使用UTM30-LX激光掃描儀和慣性傳感器采集玉米田三維點云數據,處理得到的玉米田導航車道寬度64.02%在0.05 m誤差范圍內;吳才聰等[78]通過在農機裝備上安裝北斗終端、制定數據傳輸協議的方法構建了基于北斗的農機作業大數據系統(圖7),該系統可準確記錄、獲取農機工作時長、行駛里程和作業面積等工作參數,為農機作業大數據動態監測與數據分析提供服務。

圖7 農機作業大數據系統平臺
2.2 自主避障運行
智能農機按照作業軌跡運行過程中最重要的是安全性,具體實現主要依靠自主避障功能。目前的智能農機自主避障功能主要通過機器視覺、激光雷達識別、超聲測距等方法實現。視覺避障方面,Dang等[79]使用語義分割算法從單目相機獲取的圖像中提取障礙物特征并計算其位置和距離,通過增強A*算法優化作業路徑,實現靜態與動態障礙物避讓與高效、低角度變化的作業轉向,轉向角度變化僅為2 rad。超聲測距避障方面,吳春玉[80]以超聲測距、機器視覺結合的方法,設計了農用飛行器的避障控制系統,實現了飛行器的高效快速避障響應,距離障礙物5 m、飛行速度1 m/s時的響應時間均在0.5 ms左右。激光雷達避障方面,楊洋等[81]構建了使用三階貝塞爾曲線在多邊界條件約束下路徑簇中規劃曲率最小的避障路徑算法,基于激光雷達、工控機等開發了用于作業動態識別區內障礙物信息獲取與避讓的新型農機(圖8),路徑跟蹤試驗中最大和平均橫向誤差分別為0.12 m、0.057 m,較傳統算法分別減少36.8%和28.8%。

圖8 自主避障農機
2.3 遠程在線監管
智能農機遠程在線監管是實現農機智能化發展的重要環節。已有的農機遠程在線監管方法主要通過建立網頁端和手機APP平臺實現。網頁端農機遠程監管平臺主要應用于農機數據的收集、分析與可視化,農機作業管理與調度等;手機端農機監管APP主要應用于農機作業數據的采集與功能執行等。劉洋洋等[82]使用單片機處理多源數據的方法構建了航空變量施藥實時監控系統,可實現作業軌跡、高度、速度、施藥流量等數據的實時監測,其對航跡、施藥流量監測的平均偏差分別為0.98 m、3.57%,對流量控制的最大誤差為9.26%;蘭玉彬等[1]通過構建實現天空地一體化農情信息獲取、地空無人農機協同作業決策與遠程監控的生態無人農場云端平臺(圖9),為智慧農業、精準農業的發展提供了探索經驗。

圖9 生態無人農場云端遠程監控平臺
3 討論與展望
農業植保施藥技術與裝備的創新發展進一步實現了我國農藥施用的減量增效,降低了植保作業的成本與風險,提高了作業效率,但與發達國家和長遠目標相比仍存在較大差距。主要存在以下突出問題:
(1)植保作業技術與裝備的創新、集成、應用與示范推廣程度較低。
(2)技術理論的基礎研究與硬件設備等的創新能力相對薄弱。農機產品的控制系統、控制算法、控制設備等核心軟硬件的自主創新程度較低。
針對上述問題,對我國植保施藥技術與裝備的未來發展提出以下展望:
(1)先進植保技術與裝備的創新仍停留在探索階段,新型農機產品的性能穩定性與適應性需要進一步提升與突破,應加快技術集成,縮短研發周期,加快產品落地、應用與推廣。
(2)加大基礎技術理論與設備的研究投入,進一步促進如高效控制算法、高精度控制系統、高靈敏度傳感器等軟硬件的自主創新。
(3)為滿足精準農業、智慧農業的技術需求,應深入促進多學科融合建設發展,注重交叉學科人才的培養。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08