基于LuGre摩擦模型與自抗擾技術(shù)的調(diào)速伺服系統(tǒng)復(fù)合控制策略*
2023-10-23 05:25:14張凱雯褚越強李萬軍韋雪潔
電機與控制應(yīng)用 2023年10期
張凱雯, 蘇 璟, 黃 浩, 褚越強, 李萬軍, 韋雪潔
(1.北華航天工業(yè)學(xué)院 電子與控制工程學(xué)院,河北 廊坊 065000;2.北京航天新立科技有限公司,北京 100089)
0 引 言
永磁同步電機(PMSM)由于其體積小巧、結(jié)構(gòu)簡單、質(zhì)量輕便以及可靠性強等優(yōu)點,在伺服系統(tǒng)控制領(lǐng)域被廣泛應(yīng)用,尤其是在航空航天、武器裝備及數(shù)控機床等對于電機可靠性能、控制精度要求較高的場合,PMSM受到了越來越多的關(guān)注。現(xiàn)階段,永磁同步電機的調(diào)速系統(tǒng)控制結(jié)構(gòu)采用的是速度-電流雙閉環(huán)結(jié)構(gòu)形式,控制策略大多采用PID調(diào)節(jié)器。但是這種被動地基于誤差反饋來消除誤差的方式,滯后于擾動的影響,并可能因為初始控制力過大導(dǎo)致系統(tǒng)振蕩或者嚴(yán)重超調(diào)。再加上積分環(huán)節(jié)使相角滯后,微分信號易受噪聲污染等問題,使其控制效率低、精確度低及魯棒性差[1]。隨著現(xiàn)代伺服控制精度等要求的提高,PID已經(jīng)不能夠滿足需要。伺服系統(tǒng)在工作中存在許多非線性擾動,包括間隙、摩擦和風(fēng)阻等。其中摩擦導(dǎo)致伺服轉(zhuǎn)臺低速時抖動、爬行,影響系統(tǒng)的跟蹤精度。因此,研究摩擦力矩對電機伺服系統(tǒng)的影響,并在設(shè)計控制器時對摩擦力矩進(jìn)行辨識與補償顯得尤為重要[2]。1995年,Canudas等[3]提出了LuGre摩擦模型,該模型能夠準(zhǔn)確地描述摩擦過程的動靜態(tài)特性。Khyati等[4]提出了基于LuGre模型的雙非線性觀測器的自適應(yīng)摩擦補償方法,但雙觀測器計算量大,不易工程實現(xiàn)。Ye等[5]提出了基于LuGre摩擦模型的伺服系統(tǒng)前饋補償策略研究,有效改善了轉(zhuǎn)臺伺服系統(tǒng)的低速性能。Zhang等[6]提出了基于改進(jìn)LuGre模型的液壓系統(tǒng)的滑模控制,很好地解決了由摩擦帶來的跟蹤誤差大及速度過零時會出現(xiàn)死區(qū)等問題。針對PI控制的缺陷,Han[7]于1998年提出自抗擾控制(ADRC)。Gao等[8]在非線性ADRC的基礎(chǔ)上,提出線性自抗擾控制器,并首次提出基于帶寬的參數(shù)整定策略,大大簡化了參數(shù)整定過程,推動ADRC理論研究與工程應(yīng)用。Liu等[9]提出PMSM調(diào)速系統(tǒng)的模型補償自抗擾控制策略,把模型中已知量補償?shù)紸DRC中,降低觀測器的計算量,提高了觀測器的估計精度。Liu等[10]提出的基于自抗擾控制的位置電流雙環(huán)控制策略對負(fù)載轉(zhuǎn)矩、電機參數(shù)變化等擾動具有較好的抑制作用。Yin等[11]提出了一種基于二階滑模自抗擾控制技術(shù)的轉(zhuǎn)速電流雙閉環(huán)控制策略,根據(jù)電機轉(zhuǎn)速動態(tài)模型設(shè)計了擾動觀測器估測負(fù)載轉(zhuǎn)矩和系統(tǒng)的不確定性,并證明了其收斂性。Sun等[12]設(shè)計了永磁同步電機調(diào)速系統(tǒng)非線性自抗擾控制器,顯著提高了調(diào)速系統(tǒng)的抗擾能力,增強了低速時的運行穩(wěn)定性。為了進(jìn)一步克服摩擦干擾,提高調(diào)速伺服系統(tǒng)的控制精度,本文提出一種基于自抗擾控制器與LuGre摩擦模型前饋補償相結(jié)合的復(fù)合控制器。
1 PMSM調(diào)速伺服系統(tǒng)
1.1 調(diào)速伺服系統(tǒng)的PMSM數(shù)學(xué)模型
PMSM是一個典型的多變量、強耦合、非線性和變參數(shù)的復(fù)雜系統(tǒng)。本文采用表貼式永磁同步電機。為使分析簡便,忽略電機鐵心的飽和效應(yīng),不計電機的渦流和磁滯損耗,假設(shè)電機電流為對稱的三相正弦波電流[13]。利用Clark變換和Park變換,可得到在d-q兩相旋轉(zhuǎn)坐標(biāo)系中的PMSM數(shù)學(xué)模型。
電壓方程為

(1)
式中:ud、uq分別為定子在d軸、q軸的電壓分量;id、iq分別為定子在d軸、q軸的電流分量;ψd、ψq分別為定子在d軸、q軸的磁鏈分量;ωe為電角速度,且ωe=pnω;Rs為三相繞組的電阻。
磁鏈方程為
(2)
式中:Ld、Lq分別為定子在d軸、q軸的電感分量;ψf為永磁體磁鏈大小。
由式(1)、式(2)整理可得:
(3)
式(3)實現(xiàn)了PMSM數(shù)學(xué)模型的解耦,且表貼式永磁同步電機中Ld=Lq,此時的電磁轉(zhuǎn)矩可表示為
(4)
同時,電機運動方程可表示為
(5)
通過同步旋轉(zhuǎn)d-q坐標(biāo)變換,減少了變量數(shù)量,降低了耦合關(guān)系,將永磁同步電機的數(shù)學(xué)模型轉(zhuǎn)化為便于理解分析的系統(tǒng)方程組[14]。
1.2 調(diào)速伺服系統(tǒng)的PMSM控制策略設(shè)計
本文基于積分器串聯(lián)型系統(tǒng)結(jié)構(gòu),設(shè)計了一種自抗擾技術(shù)與LuGre摩擦模型前饋補償相結(jié)合的復(fù)合控制器,如圖1所示。電流控制環(huán)分別對轉(zhuǎn)矩電流和勵磁電流使用一階自抗擾控制器來替代PID控制器,實現(xiàn)id、iq對其參考值的快速跟蹤。速度控制環(huán)采用LuGre摩擦模型前饋補償和一階自抗擾控制器相結(jié)合的控制策略,實現(xiàn)速度調(diào)節(jié)。
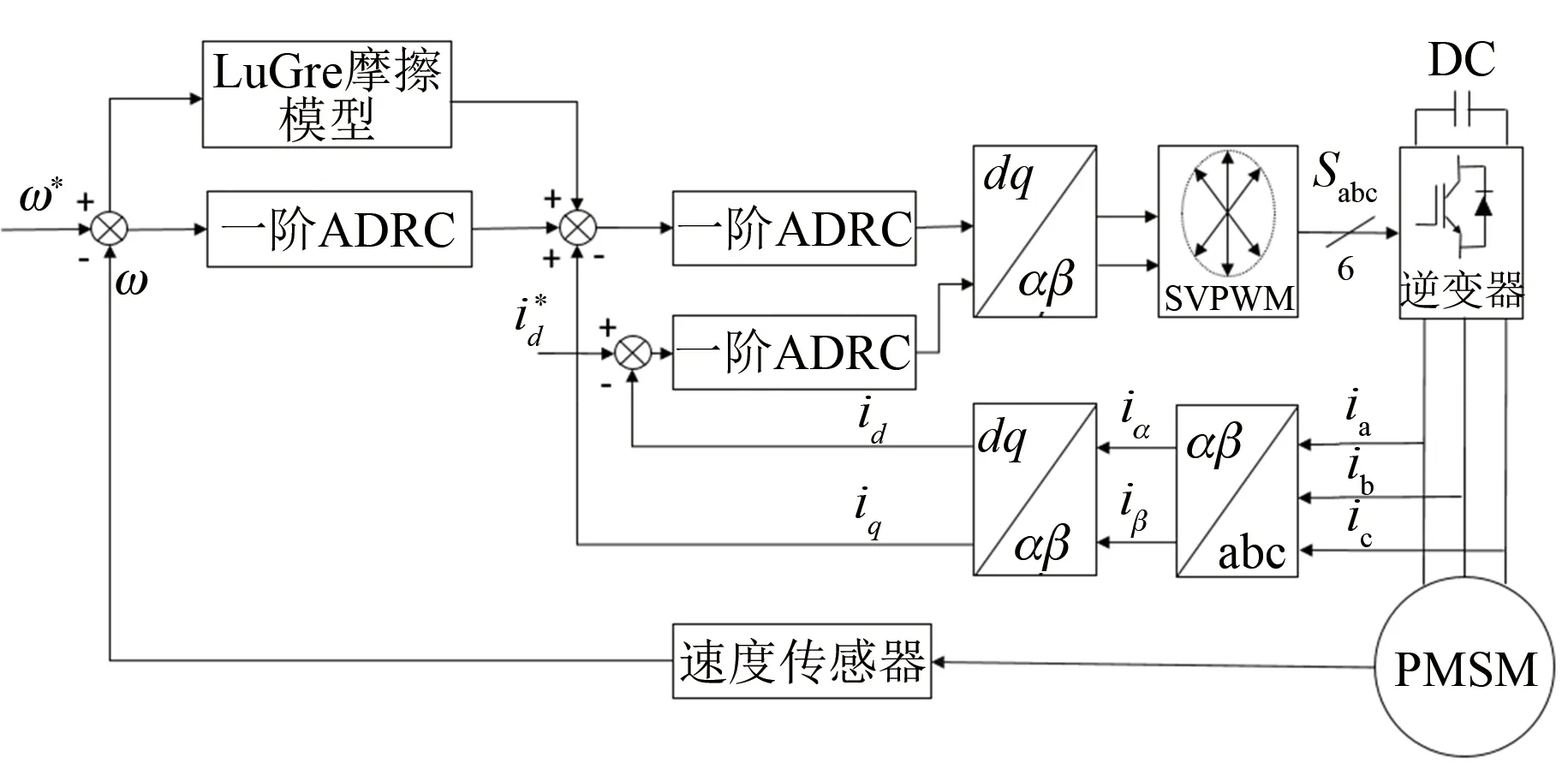
圖1 調(diào)速伺服系統(tǒng)原理圖
2 自抗擾技術(shù)
自抗擾技術(shù)是基于PID的天然抗擾與模型無關(guān)的優(yōu)點,結(jié)合現(xiàn)代控制理論中的狀態(tài)觀測,再通過計算機仿真,對仿真結(jié)果進(jìn)行歸納總結(jié)后,從工程應(yīng)用的角度探索而來。其不需要被控對象的精確數(shù)學(xué)模型,只需要通過系統(tǒng)的輸入與輸出量來估計總擾動,并具有“小誤差大增益,大誤差小增益”的優(yōu)點,可實現(xiàn)高精度的跟蹤控制。尤其對于PMSM這類具有時變、非線性及強耦合等特點的被控對象,控制效果明顯。
自抗擾控制器可拆分為三部分:跟蹤-微分器(TD)、擴張狀態(tài)觀測器(ESO)和非線性狀態(tài)誤差反饋控制率(NLSEF)。三者之間相互獨立,分別發(fā)揮各自作用。n階自抗擾控制器結(jié)構(gòu)框圖如圖2所示。
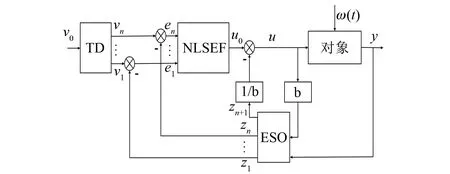
圖2 n階自抗擾控制器結(jié)構(gòu)
實際的伺服系統(tǒng)輸入信號中存在大量噪聲,經(jīng)典微分器對噪聲進(jìn)行放大,會導(dǎo)致微分信號的失真,難以應(yīng)用,這也是PID控制大多時候?qū)崬镻I控制的原因。而自抗擾控制所提出的跟蹤-微分器,因為采用了最速控制的思想,可以實現(xiàn)對輸入信號的快速跟蹤,再通過對輸入信號求微分獲得近似微分值。通過這種方式獲得的微分信號更優(yōu)質(zhì),噪聲抑制能力更強,響應(yīng)速度更快。并且TD還可以為輸入信號提供過渡過程,使得對階躍信號的跟蹤可以快速且?guī)缀鯚o超調(diào)地進(jìn)入穩(wěn)態(tài),克服了快速性與超調(diào)的沖突,系統(tǒng)魯棒性好。擴張狀態(tài)觀測器是自抗擾控制技術(shù)的核心模塊,吸收了狀態(tài)觀測器的思想,將已知和未知量動態(tài)定義為一個狀態(tài)變量進(jìn)行擾動觀測,實現(xiàn)了從源頭上的實時觀測估計。根據(jù)觀測出的擾動,通過非線性狀態(tài)誤差反饋控制率對系統(tǒng)進(jìn)行前饋補償,有效抑制了系統(tǒng)的內(nèi)外擾動,且通過將系統(tǒng)的原結(jié)構(gòu)轉(zhuǎn)變?yōu)榉e分器串聯(lián)型,簡化了系統(tǒng)的控制,使系統(tǒng)擁有了主動抗擾的能力。因其只需要被控對象的輸入信號與輸出信號,不需要系統(tǒng)擾動的具體數(shù)學(xué)模型,更具通用性和強魯棒性。同時,自抗擾的靈活還體現(xiàn)在可以將系統(tǒng)已知的模型加入到ESO中,降低ESO的計算負(fù)擔(dān),還會將未知的模型信息視為內(nèi)擾來觀測并消除,以此來保證甚至提高擾動估計的精度。
2.1 電流環(huán)自抗擾控制器設(shè)計
在永磁同步電機速度-電流雙閉環(huán)控制系統(tǒng)中,電流內(nèi)環(huán)主要用于限制電機的最大起動電流,以確保電機起動過程中電磁轉(zhuǎn)矩始終維持在允許范圍內(nèi),同時,使iq正確跟隨轉(zhuǎn)速控制器的輸出。電機轉(zhuǎn)速是判斷一個伺服控制系統(tǒng)性能優(yōu)劣的重要參考,需要滿足實時控制的要求。因此,調(diào)速伺服控制系統(tǒng)要求轉(zhuǎn)速外環(huán)穩(wěn)態(tài)時可以保持轉(zhuǎn)速平穩(wěn),動態(tài)時具有快速響應(yīng)、抗擾能力強以及高精度跟蹤的效果。所以對電流環(huán)和轉(zhuǎn)速環(huán)設(shè)計一種高性能自抗擾控制器具有重要意義。
由式(3)可以得出PMSM在d-q坐標(biāo)系中的電流方程為
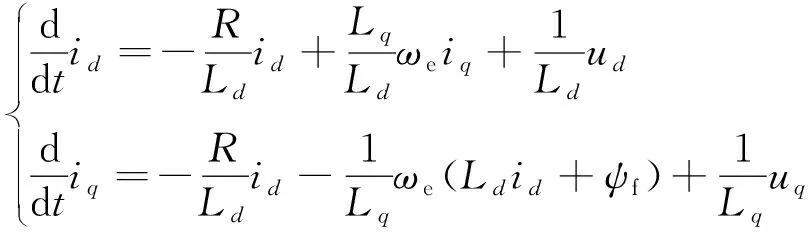
(6)
根據(jù)式(6)分別設(shè)計id、iq的電流控制器,同時可知,d、q軸存在相互耦合。為了提高電流環(huán)的控制性能,簡化控制器的設(shè)計,實現(xiàn)對d、q軸的解耦控制,可以對耦合量與反電動勢進(jìn)行前饋補償。依據(jù)自抗擾控制原理,將耦合量與反電動勢視為未知擾動量,利用ESO將其同電機的外部未知擾動一起觀測和補償。本文采用了兩個一階ADRC來實現(xiàn)電流環(huán)的控制。與之相對應(yīng)的一階非線性自抗擾控制器的方程如下。
TD:
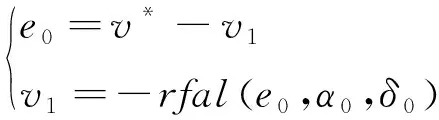
(7)
ESO:
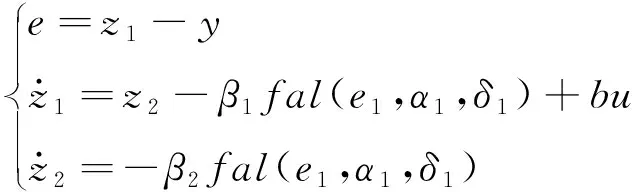
(8)
NLSEF:
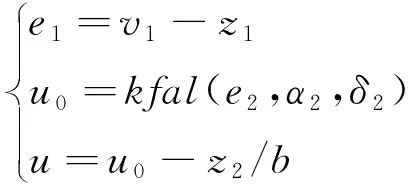
(9)
式中:e0、e、e1、e2均為誤差信號;v*為TD的輸入信號;v1為v的跟蹤信號;r為速度因子;y為被控對象的輸出信號,z1為y的跟蹤信號;z2為擾動觀測值;α0、α1、α2均為跟蹤因子;δ0、δ1、δ2均為濾波因子;β1、β2均為ESO的輸出誤差矯正增益;b為補償因子;k為調(diào)節(jié)器增益。
fal為最優(yōu)控制函數(shù),其表達(dá)式如下:
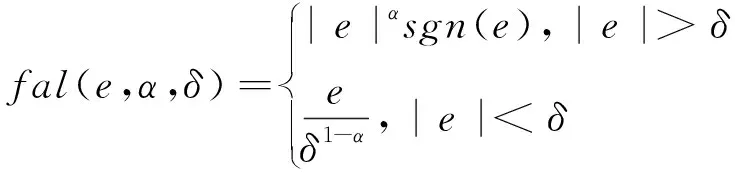
(10)
2.2 速度環(huán)自抗擾控制器設(shè)計
由式(5)整理得電機轉(zhuǎn)速方程為

(11)


(12)
假設(shè)iq為控制量u,轉(zhuǎn)速ωm為狀態(tài)變量x1,系統(tǒng)總擾動擴張為狀態(tài)變量x2。可將式(11)轉(zhuǎn)換成標(biāo)準(zhǔn)形式:

(13)
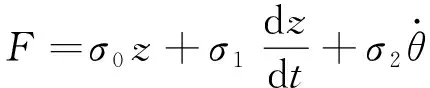
由式(13)可知,調(diào)速系統(tǒng)為一階系統(tǒng),應(yīng)采用一階ADRC作為其轉(zhuǎn)速調(diào)節(jié)器,其方程與電流環(huán)使用的一階ADRC相同。相應(yīng)的Simulink仿真模型如圖3所示。
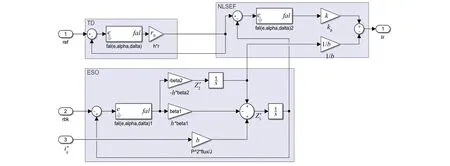
圖3 速度環(huán)一階ADRC仿真模型
綜上所述,針對PMSM的調(diào)速伺服控制系統(tǒng)的ADRC控制器設(shè)計,通常視系統(tǒng)耦合量為系統(tǒng)內(nèi)擾動,將其與系統(tǒng)的各未知外擾動相加作為系統(tǒng)總擾動,再通過ADRC對總擾動進(jìn)行實時估計并進(jìn)行補償,從而將電機的數(shù)學(xué)模型轉(zhuǎn)化為積分器串聯(lián)型。簡化控制過程中,實現(xiàn)解耦控制并使控制系統(tǒng)魯棒性得到增強。
3 LuGre模型的前饋補償設(shè)計
3.1 LUGRE模型
在高精度調(diào)速伺服系統(tǒng)運行過程中,系統(tǒng)摩擦?xí)?dǎo)致跟蹤誤差、極限環(huán)和黏滯滑動等問題,使系統(tǒng)的低速性能大打折扣。基于已知摩擦模型進(jìn)行補償,響應(yīng)速度快且可預(yù)見,已經(jīng)成為工程應(yīng)用中一種重要的摩擦補償策略。本設(shè)計利用得到的系統(tǒng)的LuGre摩擦模型在速度環(huán)進(jìn)行前饋補償,來提高系統(tǒng)的速度跟蹤精度。
LuGre模型受鬃毛彎曲變化的啟發(fā),用鬃毛的形變來直觀表示摩擦過程中突點的變化,更加直觀。當(dāng)接觸面發(fā)生微小的位移時,鬃毛就會產(chǎn)生一定程度的彎曲,這時會有一個反作用力,即表示為摩擦力。LuGre模型還吸收了Stribeck模型,能夠很好地解決零速附近的強非線性問題。因此,LuGre模型可以準(zhǔn)確地體現(xiàn)系統(tǒng)的動靜態(tài)摩擦力特性,是目前比較完善的摩擦數(shù)學(xué)模型。其表達(dá)公式如下:
(14)

(15)
(16)

LuGre摩擦模型如圖4所示。
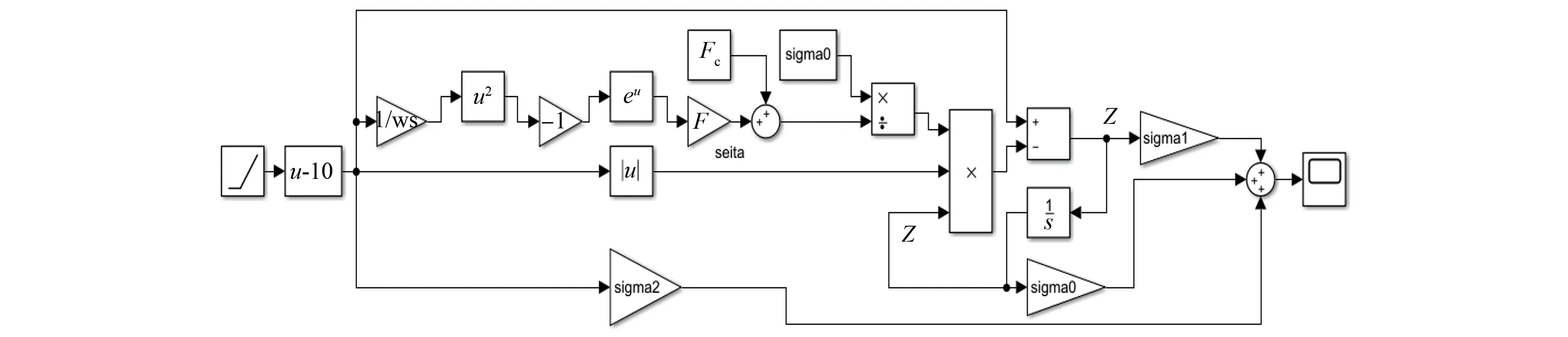
圖4 LuGre摩擦模型
3.2 摩擦參數(shù)的辨識
LuGre模型具有2個動態(tài)參數(shù)和4個靜態(tài)參數(shù)。本文采用了文獻(xiàn)[2]所提的方法,首先采集系統(tǒng)在低速轉(zhuǎn)動和勻速轉(zhuǎn)動下的轉(zhuǎn)速和轉(zhuǎn)矩數(shù)據(jù);再利用遺傳算法將采集的力矩-速度曲線和Stribeck曲線進(jìn)行曲線擬合,辨識出靜態(tài)參數(shù);最后,使用近似估計法算出動態(tài)參數(shù)。
遺傳算法是模擬自然界中生物進(jìn)化過程演化而來的全局概率搜索算法,相比于極大似然法、最小二乘法等,其能夠在更快求解的同時,避免陷入局部最優(yōu)解陷阱。遺傳算法基本流程圖如圖5所示。
圖5 遺傳算法基本流程圖
3.2.1 靜態(tài)參數(shù)辨識

(17)
根據(jù)式(17)可得,待辨識參數(shù)向量設(shè)定為

(18)
辨識誤差為
(19)
取誤差函數(shù)的平方和作為目標(biāo)函數(shù):
(20)
取適應(yīng)度函數(shù)為
(21)
靜態(tài)參數(shù)辨識在速度閉環(huán)下進(jìn)行,速度分別給定-30 ~30 rad/s的階躍信號記錄穩(wěn)態(tài)時的q軸電流值并轉(zhuǎn)換成對應(yīng)的轉(zhuǎn)矩信息,再利用遺傳算法將采集的力矩-速度曲線和Stribeck曲線進(jìn)行曲線擬合,辨識出靜態(tài)參數(shù)。
3.2.2 動態(tài)參數(shù)辨識
給系統(tǒng)施加一個很小的驅(qū)動力,使其處于臨界靜止?fàn)顟B(tài),式(16)可改寫為

(22)
則系統(tǒng)模型可寫成

(23)
通過拉普拉斯變換得:
(24)
由式(24)可知,系統(tǒng)處于臨界靜止?fàn)顟B(tài)時,
可近似視為一個二階系統(tǒng),當(dāng)系統(tǒng)停止運動時:

(25)
式中:θs為靜摩擦區(qū)域角位移。
取阻尼系數(shù)為0.7,則:

(26)
由式(26)可求出σ1的值。
4 仿真分析
為驗證本文控制策略的有效性,利用MATLAB/Simulink仿真平臺分別搭建了PID控制模型與本文所提控制策略模型來進(jìn)行對比分析。永磁同步電機仿真參數(shù)見表1,所提控制策略的仿真模型如圖6所示。
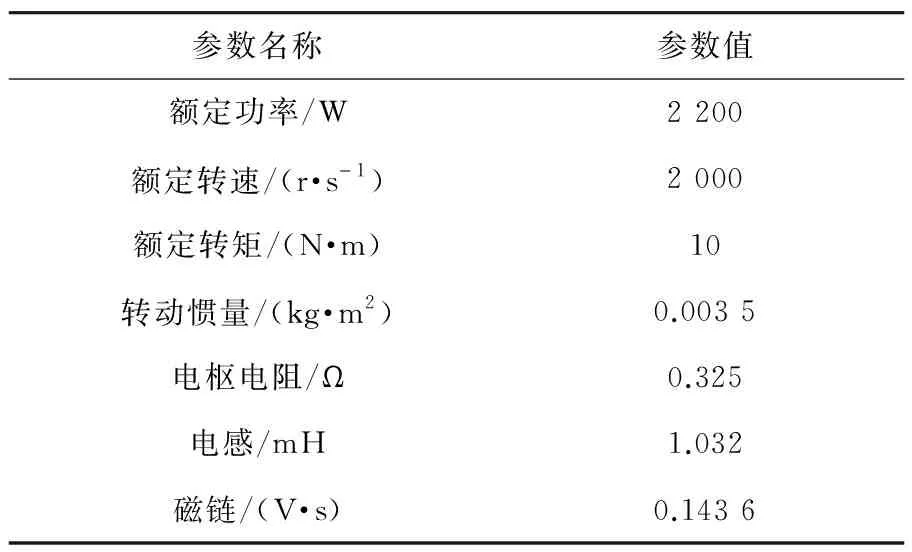
表1 永磁同步電機仿真參數(shù)
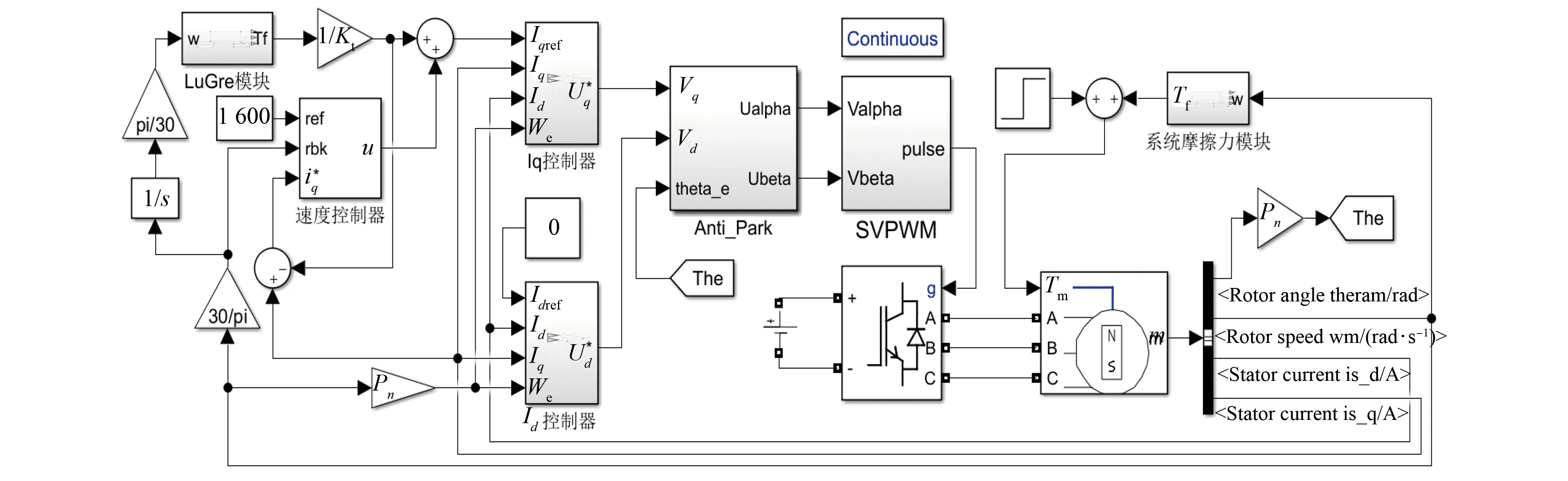
圖6 所提控制策略的仿真模型
在本試驗中,電機部分引入了摩擦模塊模擬實際中的摩擦擾動,摩擦模塊參數(shù)見表2。上電后電機的給定轉(zhuǎn)速由0 r/s升至1 600 r/s,在0.2 s時,負(fù)載轉(zhuǎn)矩由0 N·m突變?yōu)?.5 N·m。在此種工況下,對比采用所提控制策略與PID控制策略的控制效果。PID控制策略的電流環(huán)參數(shù)Kp=1.4,Ki=441,速度環(huán)參數(shù)Kp=0.132,Ki=6.6,Ba=0.012 3。
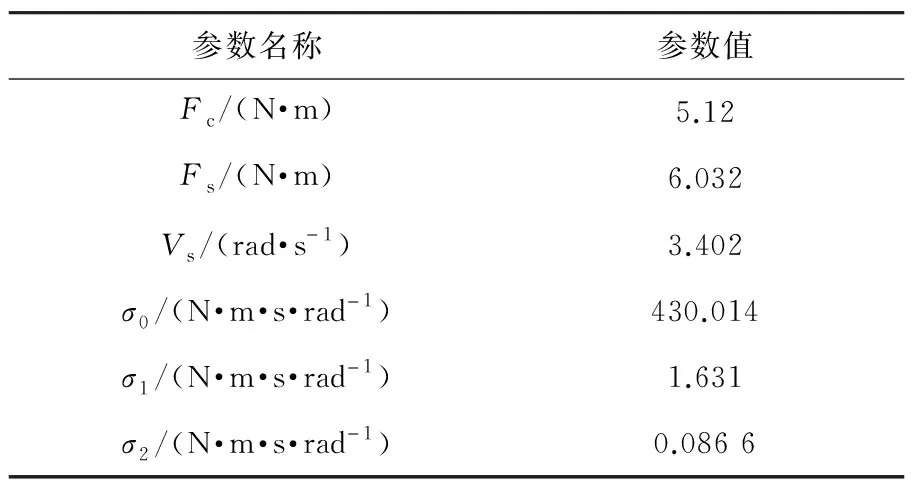
表2 摩擦模塊參數(shù)
跟蹤因子是一個取值在0~1之間的經(jīng)驗值,其值與跟蹤速度成反相關(guān)性;濾波因子為影響濾波效果的常數(shù),濾波效果隨其值的增大而增大;速度因子決定了信號的跟蹤速度,速度因子增大,ADRC的跟蹤微分值增減幅度隨之增大,跟蹤速度加快;補償因子為iq的增益,調(diào)節(jié)增益的選值影響控制器的觀測性能,需要靈活調(diào)整;矯正增益分別為誤差和微分的增益,取值通常由帶寬決定,β1=2ω,β2=ω2。速度環(huán)ADRC參數(shù)見表3,辨識出的LuGre摩擦模型參數(shù)見表4。
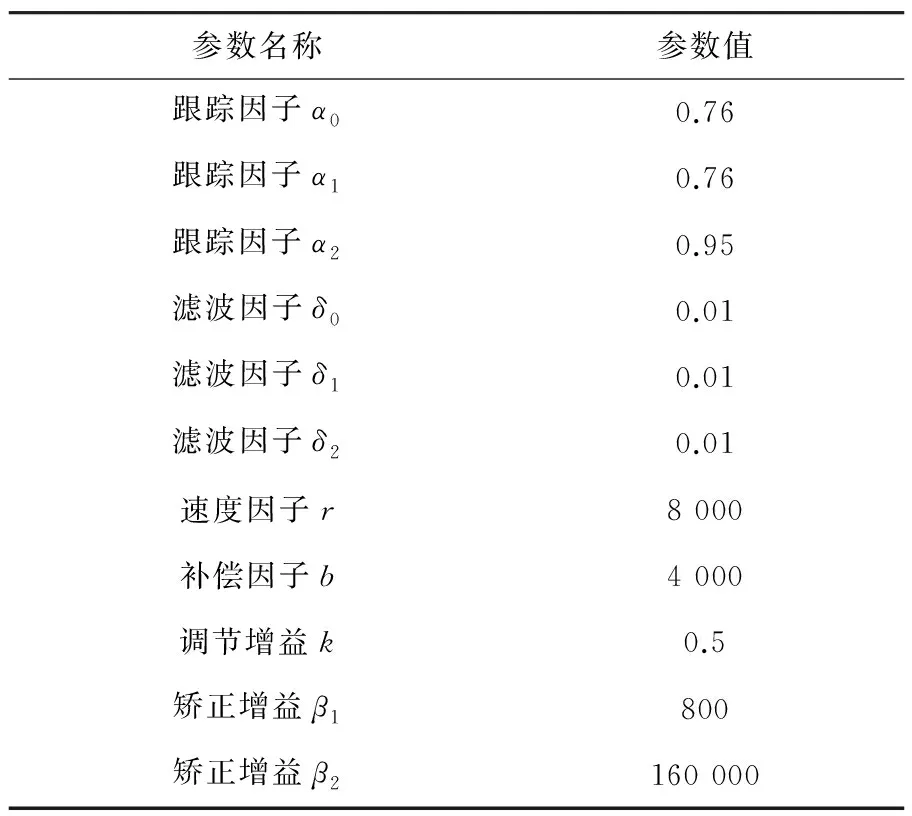
表3 速度環(huán)ADRC參數(shù)
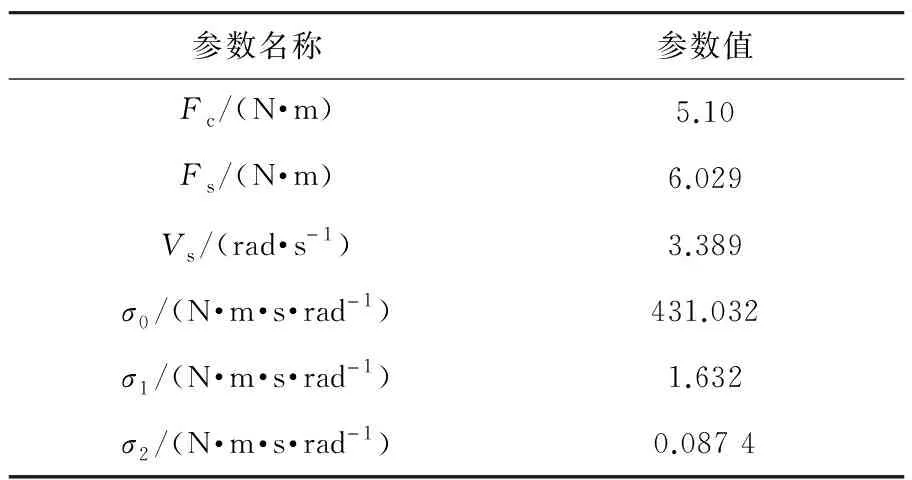
表4 LuGre模型辨識參數(shù)
圖7為兩種控制策略的轉(zhuǎn)速波形,由圖7可知,要達(dá)到目標(biāo)轉(zhuǎn)速,所提控制策略用時為0.03 5 s,超調(diào)量為17 r/s,PID控制策略用時為0.15 s,超調(diào)量為89 r/s;負(fù)載發(fā)生變化后,所提控制策略下恢復(fù)到目標(biāo)轉(zhuǎn)速用時僅為0.02 s,而PID則為0.1 s。綜上可證明兩種控制策略都可以在短時間內(nèi)將轉(zhuǎn)速調(diào)節(jié)至目標(biāo)值,但是基于LuGre模型前饋補償與自抗擾技術(shù)的復(fù)合控制從0 r/m達(dá)到目標(biāo)值的響應(yīng)時間更短,超調(diào)更小;并且當(dāng)負(fù)載出現(xiàn)擾動時,二者超調(diào)量基本相同,但所提控制策略恢復(fù)至目標(biāo)轉(zhuǎn)速的時間大幅度縮短,其動態(tài)性能更好,魯棒性更強。
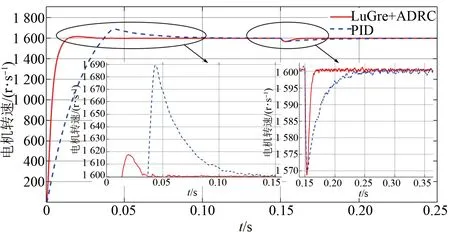
圖7 兩種控制策略的轉(zhuǎn)速波形
圖8和圖9分別為PID控制策略與所提控制策略下的三相電流,圖10和圖11分別為兩種控制策略下的d軸電流和q軸電流。由圖8~圖11可知,PID控制策略與所提控制策略都能確保電流跟蹤至目標(biāo)電流,但所提控制策略用時更短,且所提控制策略電流的相位滯后更小,說明自抗擾控制改善了原PID控制中積分環(huán)節(jié)的相位滯后問題。
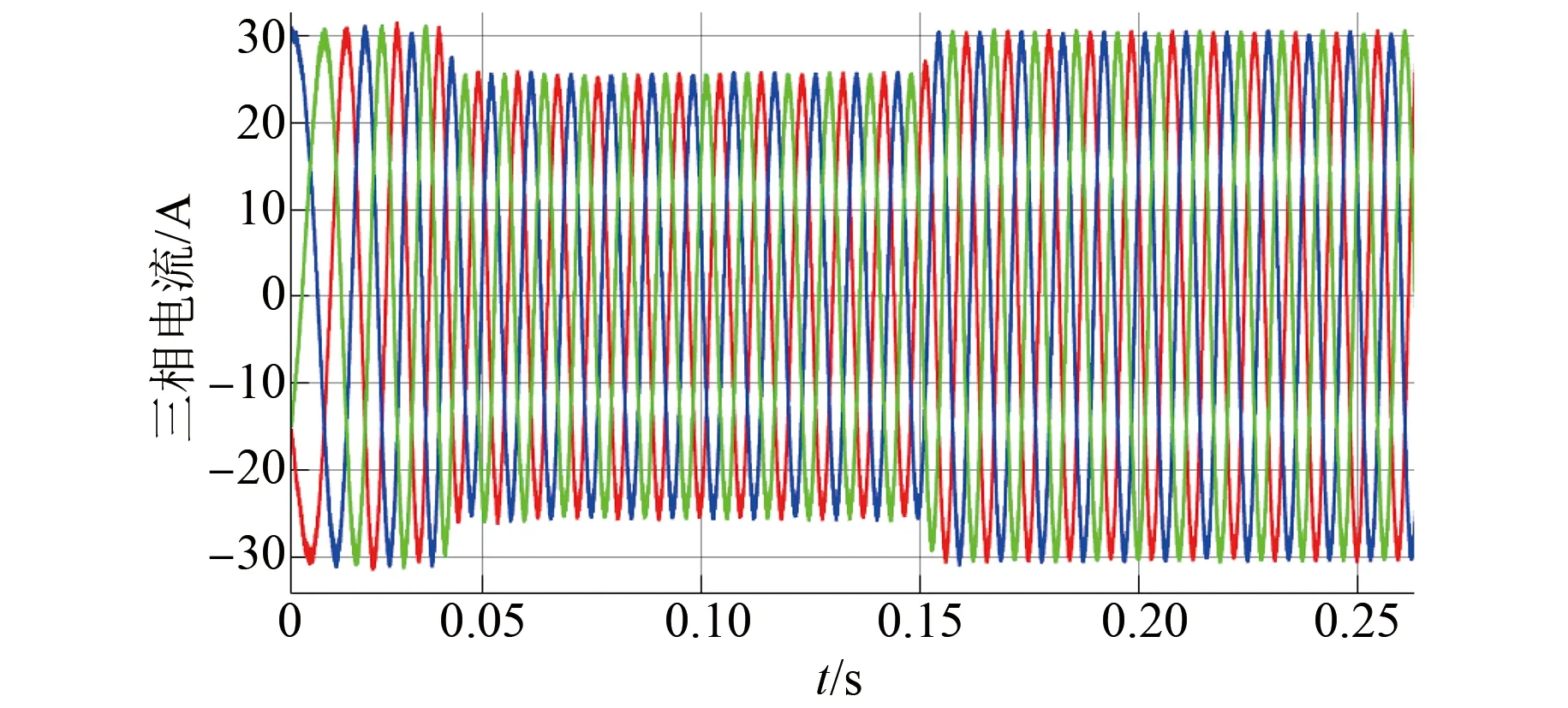
圖8 PID控制策略下的三相電流
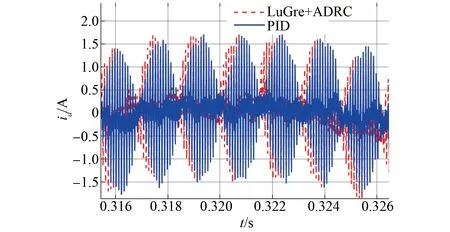
圖10 兩種控制策略的d軸電流
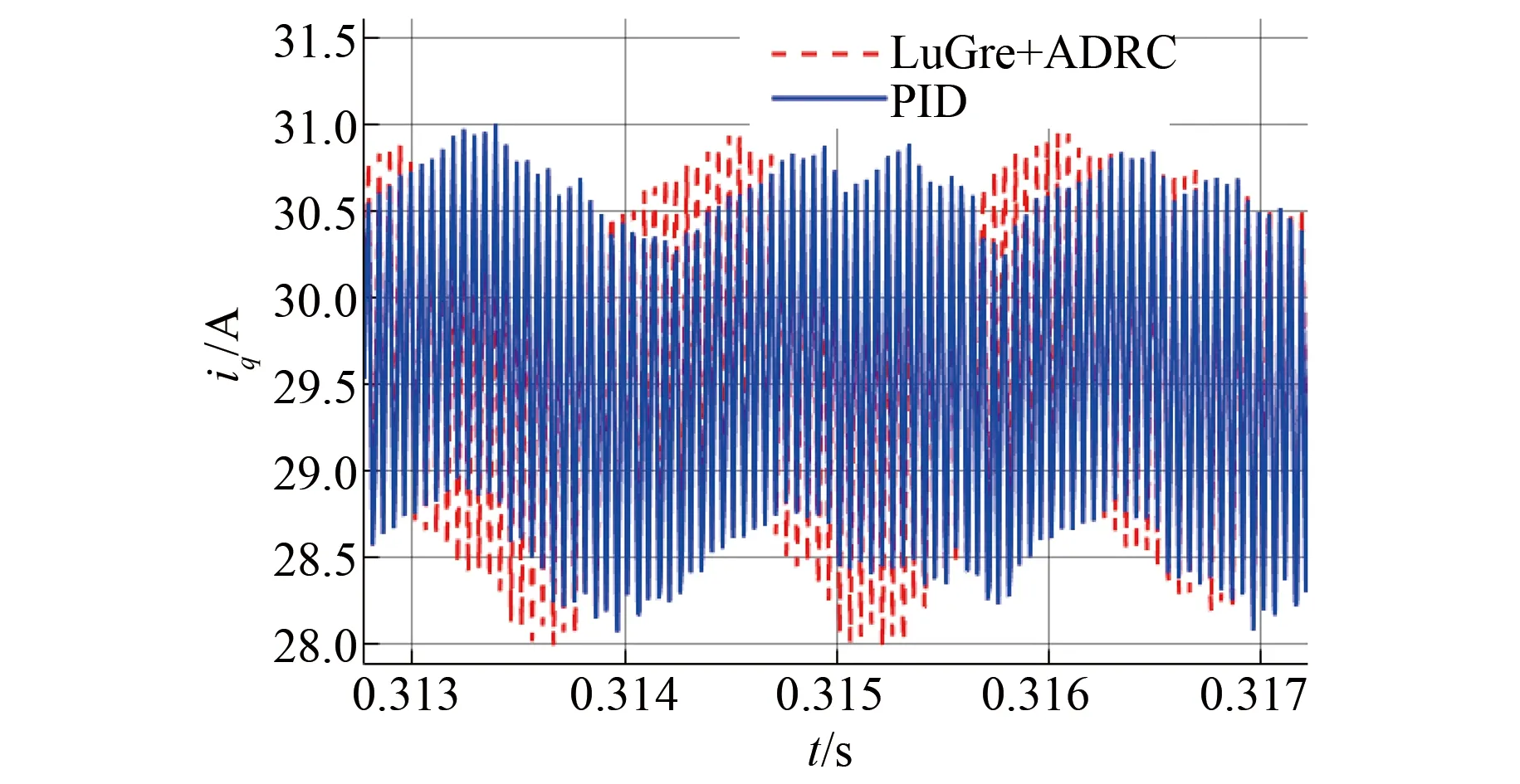
圖11 兩種控制策略的q軸電流
圖12和圖13對比了兩種控制策略下達(dá)到穩(wěn)定轉(zhuǎn)速時的靜態(tài)性能,可以看出所提控制策略轉(zhuǎn)速波形峰峰值更小,說明其靜態(tài)誤差更小,抑制抖振的能力更強。
5 結(jié) 語
本文提出了一種基于LuGre摩擦模型與自抗擾技術(shù)的調(diào)速伺服系統(tǒng)復(fù)合控制策略。利用LuGre摩擦模型對摩擦擾動進(jìn)行辨識,并對其進(jìn)行前饋補償。考慮到實際中不存在完美模型,在速度環(huán)和電流環(huán)分別加入一階自抗擾控制器,視系統(tǒng)耦合量為系統(tǒng)內(nèi)擾動,將其與系統(tǒng)的各未知外擾動相加作為系統(tǒng)總擾動,再通過ADRC對總擾動進(jìn)行實時估計并進(jìn)行補償。同時,LuGre模型也緩解了ADRC的計算壓力,互為補充。最后通過兩組仿真試驗證明了所提策略的優(yōu)越性。試驗結(jié)果表明,所提控制策略響應(yīng)速度快、調(diào)節(jié)時間短、超調(diào)低,通過對仿真數(shù)據(jù)分析計算可得,所提控制策略的超調(diào)分別為PID控制的23.3%、20.0%及19.1%,所提控制策略的抗擾能力和抑制抖振能力也更好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
