內置式永磁同步電機精確參數的MTPA控制
2023-10-19 00:31:24張曉史軍偉王越劉業釗
電測與儀表 2023年10期
張曉,史軍偉,王越,劉業釗
(1.中國礦業大學 電氣與動力工程學院,江蘇 徐州 221116; 2.中國礦業大學 信息與控制工程學院,江蘇 徐州 221116)
0 引 言
永磁同步電機(PMSM)以其效率高,高功率密度等優點[1],成為當前研究的熱點,尤其是轉矩電流比較高的內置式永磁同步電機(IPMSM),在電動汽車及工業領域得到了廣泛的應用[2-3]。IPMSM的永磁體內置于轉子,交、直軸電感不相等,其電磁轉矩由永磁轉矩和磁阻轉矩組成,因此可充分利用磁阻轉矩來提高電機的轉矩輸出能力。在dq同步旋轉坐標系下,一條等轉矩曲線可由不同的交直軸電流組合產生,在等轉矩曲線的電流組合中存在使定子電流最小的一組交、直軸電流組合。最大轉矩電流比(MTPA)控制是在輸出電磁轉矩相等的前提下,通過合理的控制方法使定子電流最小,從而減少銅耗,提高電機的運行效率。永磁同步電機在實際運行中,會不可避免地出現參數變化[4],影響MTPA控制的準確性。
為實現MTPA控制,文獻[5]采用費拉里法計算MTPA軌跡,該方法控制原理簡單,但該方法需要精確恒定的電機參數。為解決電機參數對控制效果的影響,文獻[6]使用工程近似求解策略,采用查表法進行MTPA控制,在控制時查詢預先制作的電磁轉矩與交、直軸電流關系的表格,但是制表需要大量的測試試驗,耗費時間,且電機使用過久后存在老化、永磁體退磁等問題,使最初制定的查詢表格存在誤差。文獻[7]采用迭代法求解MTPA問題,并用擬合曲線將其表示,提高了系統的動態性能,但是不具有通用性,只針對單一的電機。文獻[8]采用信號注入法提取MTPA控制下的最優定子電流矢量角,大大減少了前期準備工作,能夠較好地實現MTPA控制,但注入信號會產生額外的損耗,且對注入信號的幅值和頻率的選取要求較為嚴格,因此實現較為困難。針對參數辨識問題,文獻[9]在直線永磁同步電機上通過測量電流控制器并計算相應的沃爾什一階系數,實現參數辨識。
針對上述問題,采用遺忘因子遞推最小二乘法在線辨識電機參數,并將得到的電機參數用于MTPA控制,該方法能夠根據電機參數的變化實時調整MTPA控制軌跡,提高了電機的動態性能和魯棒性。
1 IPMSM數學模型
在dq同步旋轉坐標系下,定子電壓方程可表示為[10-11];
(1)
電磁轉矩方程:
(2)
運動方程:
(3)
式(1)~式(3)中,ud、uq分別為坐標變換后電機的d、q軸電壓;id、iq分別為坐標變換后電機的d、q軸電流;Rs為電機定子繞組電阻;ωe為電機轉子的電角速度;Ld、Lq分別為坐標變換后d軸和q軸上的電感分量;ψf為電機轉子永磁體磁鏈;Pn為電機的極對數;Te為電機的電磁轉矩;TL為負載轉矩;B為阻尼系數;wm為電機轉子的機械角速度;J為電機的轉動慣量。
2 MTPA原理
由電磁轉矩公式可得出,通過對交、直軸電流進行控制即可實現對電磁轉矩的控制。在電磁轉矩一定的情況下,通過合理的控制策略使交、直軸電流組合得到的定子電流最小,從而實現MTPA控制,MTPA控制的數學表達式可表示為[12]:
(4)
式中is為定子電流。
由拉格朗日乘數法求解極值問題,得到在MTPA控制下的交、直軸電流分別與定子電流的關系式:
(5)
使用式(5)即可實現MTPA控制,控制軌跡如圖1所示。

圖1 MTPA控制軌跡圖
可以看出式中含有較多的電機參數,但在電機運行時參數會不可避免地發生變化,從而使實際MTPA軌跡發生偏離。為凸顯電機參數對MTPA軌跡的影響,將式(5)中直軸電流與定子電流的關系重寫為:
(6)
其中D為包含電機參數的表達式,其式為:
D=ψf/(Lq-Ld)
(7)
圖2為不同D值(即電氣參數發生變化)所對應的MTPA控制軌跡曲線。由圖2可以看出,要實現精準的MTPA控制必須知道當前運行狀態下的電機參數,所以使用遺忘因子遞推最小二乘法對電機參數在線辨識。
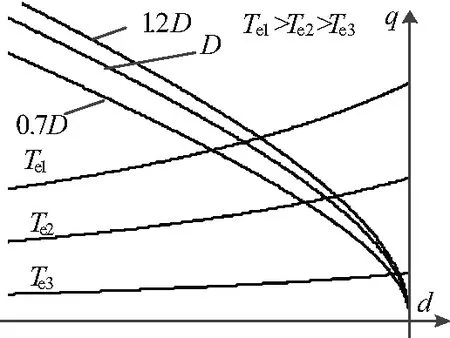
圖2 不同D的MTPA控制軌跡圖
3 在線參數辨識與MTPA控制
3.1 遺忘因子遞推最小二乘法
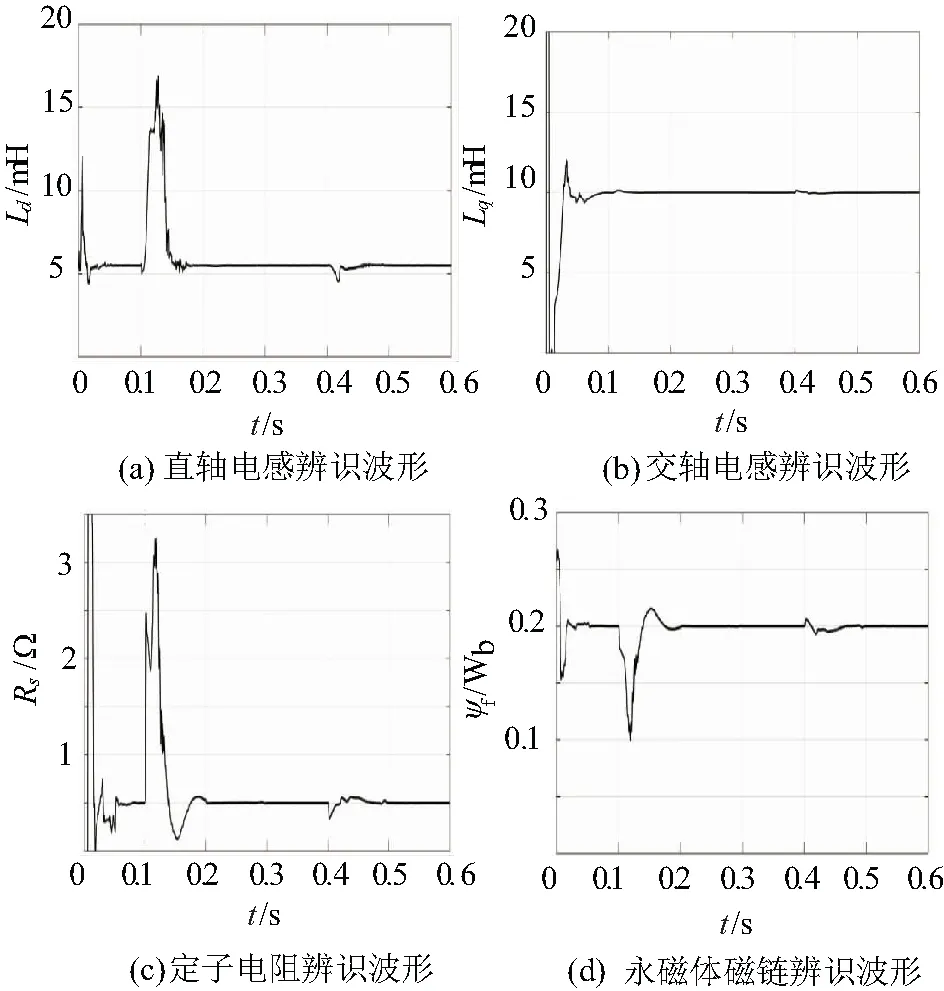
遞推最小二乘法存在“數據飽和”的問題[13],文中在遞推最小二乘法的基礎上引入一個遺忘因子λ(0 取指標函數為[14]: (8) 式中θ為被辨識參數矩陣;φ(k)為回歸信息向量;y(k)為第k次觀測的輸出向量。 基于上述指標函數,遺忘因子遞推最小二乘法的推導公式可表示為: (9) 辨識的電機參數包括:定子電阻Rs、交軸電感Lq、直軸電感Ld、永磁體磁鏈ψf。式(1)中的d軸電壓方程不包含ψf,所以先用直軸電壓方程辨識Rs、Lq、Ld,再利用交軸電壓方程辨識ψf。 將dq旋轉坐標系下的電壓方程改寫為矩陣形式并移項得到如下矩陣[15]: (10) 由于電壓方程中含有電流的微分項,現對電流作離散化處理得: (11) 式中Ts為采樣時間。 根據式(8)和式(9)運用遺忘因子遞推最小二乘法對Rs、Lq、Ld進行辨識得到。 運用d軸電壓方程對永磁體磁鏈進行辨識,將d軸電壓方程進行處理得到: (12) 運用上述公式即可在線辨識電機電氣參數Rs、Lq、Ld、ψf從而將準確的電機參數應用于MTPA控制。 為解決電機參數變化引起實際MTPA軌跡發生偏離而無法跟蹤的問題,將在線辨識的實時電機參數用于計算當前MTPA軌跡,控制框圖如圖3所示。 圖3 基于參數辨識的MTPA控制框圖 實現MTPA控制的公式表示如下[16]: (13) (14) 為驗證所述方法的準確性與有效性,利用Matlab/Simulink軟件對內置式永磁同步電機精確參數的MTPA控制系統進行了仿真,控制系統框圖如圖4所示,IPMSM的主要參數如表1所示。 表1 IPMSM參數 圖4 IPMSM的MTPA控制系統框圖 仿真系統模型中電機帶5 N·m負載啟動,待系統穩定后在0.1 s時加載到20 N·m。為了表現MTPA控制在減小定子電流方面的性能,在0~0.3 s采用矢量控制中的id=0的控制方法,0.3 s后系統切換到MTPA控制;為驗證所述MTPA控制的動態性能和參數辨識的準確性,在0.4 s時突加負載到30 N·m。 采用遺忘因子遞推最小二乘法對電機參數辨識的結果如圖5所示,可以看出在電機啟動和負載突變時電機參數波動較大。負載增量在0.1 s時比0.4 s時多,q軸電流變化幅值大,使直軸電感在0.1 s時波動較大。但交、直軸電感均能在較短的時間內正確跟蹤電感的實際值。在圖5(c)、圖5(d)中定子電阻和永磁體磁鏈在負載突變時,所用辨識方法的辨識過程均小于0.1 s。所以文中所用遺忘因子遞推最小二乘法辨識電機參數收斂速度快,穩態誤差小。 圖5 電機參數辨識結果 采用上述控制方法實現MTPA控制得到的直軸電流、交軸電流、定子電流和電磁轉矩波形圖如圖6所示。 圖6 MTPA控制仿真波形圖 從圖6可以看出,在0.3 s時由id=0控制切換到MTPA控制后,直軸電流id會大幅增加,交軸電流iq、定子電流is明顯降低,因為MTPA 控制實現了交、直軸電流的最佳組合,使定子電流在該負載條件下最小,從而減小銅耗提高運行效率。 在0.4 s突加負載時,在電機參數波動的情況下交、直軸電流快速實現最優組合,電磁轉矩能夠快速地響應,轉矩脈動小,電流波動較小。 針對內置式永磁同步電機在進行MTPA控制時因電機參數變化導致MTPA軌跡發生偏離的問題,將遺忘因子遞推最小二乘法在線參數辨識引入MTPA控制中,在線得到的電機參數用于計算當前MTPA軌跡,實現了MTPA軌跡跟隨電機參數變化而及時調整。該方法與應用較多的查表法相比極大地減少了工作量和時間,同時也避免了電機在使用過程中的老化、永磁體退磁等問題使最初制作的查詢表格不準確的情況,仿真結果驗證了所提方法的正確性和有效性。

3.2 電氣參數辨識


3.3 在線參數辨識的MTPA控制

4 仿真驗證與分析



5 結束語