無纜自動系泊系統分析和展望
2023-10-18 04:52:40崔戈
船舶標準化工程師 2023年5期
崔 戈
(海裝駐北京地區第七軍事代表室,北京 100841)
0 引言
傳統系泊方式一般根據船舶噸位進行頭纜、尾纜、倒纜和橫纜系泊,每根纜繩必須保持均勻受力。隨著船舶吃水、潮位、受力情況發生變化,需隨時調整纜繩的松緊[1]。每年因纜繩老化、天氣惡劣、系纜不規范等原因造成的系泊安全事故時有發生。隨著物流貿易全球化發展及自動控制技術持續進步,無纜自動系泊系統憑借高效率、經濟、安全、可靠的優勢正逐步替代傳統系泊方式。國外無纜系泊系統應用較為成熟,已形成真空式自動系泊和磁力式自動系泊這2 條技術路線。歐美在無纜自動系泊裝置碼頭安裝、船舶靠港的自動化程度和效率方面較為領先。
海運因具有運輸能力大,運費低等優點為我國完成60%左右的國際運輸,但國內碼頭幾乎沒有安裝使用無纜自動系泊裝置。近幾年國內已逐步開始研究無纜系泊技術,通過研究、攻克自動系泊吸附技術、補償控制技術等關鍵技術,逐步實現國產自動系泊裝置系列化,滿足國內港口碼頭的使用需求。
本文對國內外無纜自動系泊技術發展情況、無纜自動系泊系統類型及應用情況進行介紹,并對關鍵技術進行分析。在此基礎上,對自動系泊技術的未來發展趨勢進行展望。
1 國內外發展情況
新西蘭凱伏特集團開發出世界首個MoorMaster?創新式真空自動化系泊系統,第一套已于1999年投入使用,至今基本未出現故障和事故。在研發和設計所有MoorMaster?系泊系統時,凱伏特集團始終將安全因素放在第一位。MoorMaster ?系泊系統適用于眾多的港口和船只類型,包括貨柜碼頭、散裝碼頭、滾裝船舶和渡輪,應用場景見圖1。如今凱伏特集團在自動系泊系統方面已經形成系列產品。
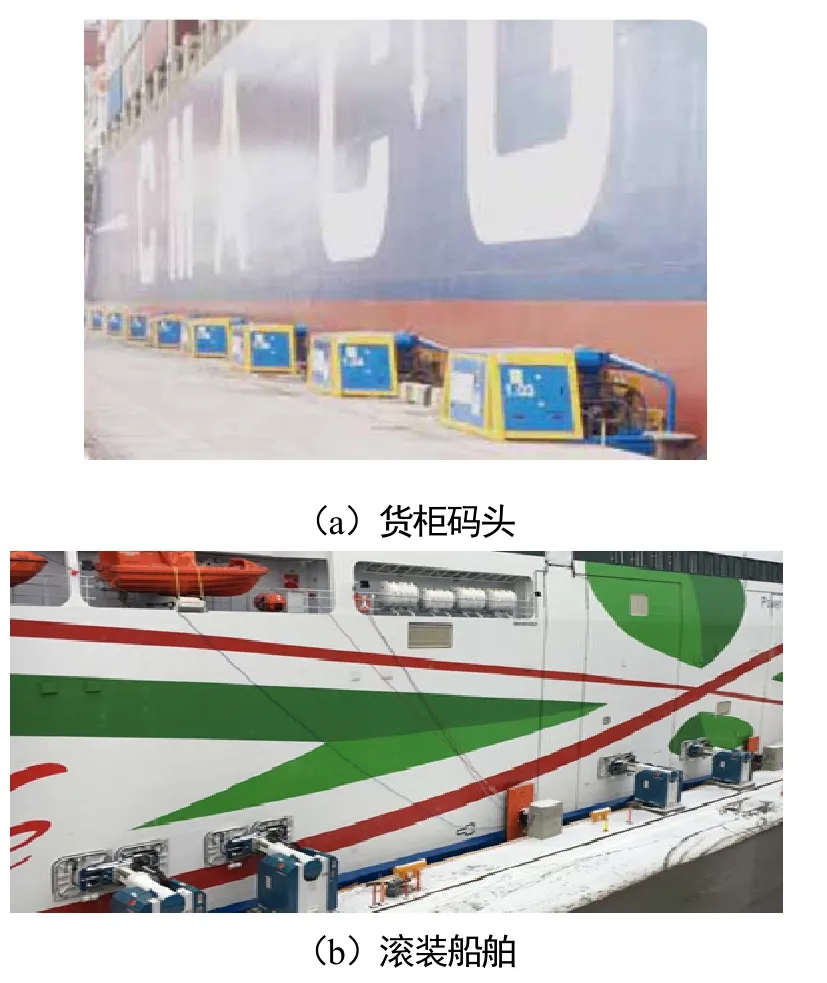
圖1 MoorMaster?系泊系統的應用場景
2 無纜自動系泊系統類型及應用
無纜自動系泊系統主要有真空吸盤式和磁力吸盤式這2 種方式。
2.1 真空吸盤式自動系泊系統
真空吸盤式自動系泊系統是目前國際上較為主流的自動系泊裝置,各家研發公司已逐步將其產品形成系列化和標準化。其前端安裝真空吸盤,通過吸盤吸附在船舶側面,可通過自動控制、遠程控制及現場應急控制等多種控制手段進行系泊控制。國際上研究和制造真空式自動系泊系統較為成熟的有總部位于瑞士Cavotec公司生產的Moor Master?系列,產品外形見圖2。此外,還有瑞典Trelleborg 公司生產的Auto Moor 系列,產品外形見圖3。

圖2 MoorMaster?系列真空自動系泊系統
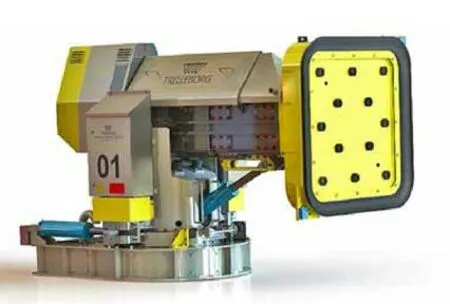
圖3 Auto Moor 系列真空自動系泊系統
無纜自動化系泊系統打破了傳統系泊模式,不使用任何繩索,幾十秒內即可完成船舶靠泊離泊操作[2],從2003年開始,加拿大、英國、澳大利亞、新西蘭等發達國家已經將無纜自動系泊系統陸續投入使用。
目前國外無纜自動系泊系統已經比較成熟,類型也比較繁多。據了解目前國內無纜自動系泊系統還處于起步階段,國內最先進的自動化碼頭如青島港、上海洋山港自動化程度較高,但均未將無纜自動系泊系統投入使用。但隨著我國港口運營朝著自動化、現代化發展,港口配置自動系泊系統將成為必然趨勢。
2.2 磁力式自動系泊裝置
磁力式自動系泊系統是基于磁力的自動系泊裝置,其前端設置電磁吸盤。國內廠家設計、生產的磁力吸盤能夠產生600~1 200 kN/m2的吸力[3]。吸盤主要有電磁式和永磁式這2 種方式。電磁式在吸附時需長時間通電產生磁力,因此采用永磁式較為安全和經濟,其吸盤主要由吸盤主體、環氧樹脂、磁軛、釹鐵硼永磁體、鋁鎳鈷磁鋼及線圈等部分組成[3]。其控制原理與真空式自動系泊系統類似。Mampaey 公司生產的Dock-Locking 系列磁力式自動系泊系統,通過液壓缸帶動的永磁吸盤實現船體與系泊裝置的連接,產品外形見圖4。

圖4 Dock-Locking 系列磁力式自動系泊系統
3 關鍵技術分析
為適應未來智能船舶發展的需要,亟需開展無纜自動系泊系統技術研究。而系纜力分析計算是進行技術研究的前提。
船舶系纜因壓排水、人員(貨物)滿載與空載、潮汐、風載、過往船舶影響等因素,可能會使船舶產生撞擊或偏離碼頭等安全性問題。在船舶撞擊或偏離碼頭時,無纜自動系泊系統進入補償狀態,無纜自動系泊裝置的真空吸盤或電磁吸盤在執行機構(油缸)作用下進行6 自由度運動。因此,計算船舶各自由度方向的系纜力是進行自動系泊系統設計的關鍵。系纜力計算需要遵循JTJ 215—1998《港口工程荷載規范》[4]的相關要求,計算內容主要包括作用于船舶上的風成系纜力、作用于船舶上的水流系纜力、過往船舶興波對船舶系纜力的影響等。
目前,研究人員仍需要突破吸附技術、多自由度船體姿態補償控制技術、多設備協同作業技術及系泊安全可靠性設計技術等關鍵技術,以保證無纜自動系泊系統的安全、可靠運行。
3.1 吸附技術研究
吸附裝置是無纜自動系泊系統的關鍵執行機構,其吸附能力決定無纜自動系泊系統的任務成功率。真空吸盤和磁力吸盤在工業生產線、起吊設備中已得到成熟應用,其一般承受垂直拉力。吸附裝置根據6 個自由度方向的運動情況相應調整各方向抗拉或抗壓能力。
3.1.1 真空吸附技術
針對真空吸盤的材料、密封型式、外形尺寸以及觸點的布置開展技術攻關,解決真空吸盤的真空度及抗壓性能。針對真空壓力等技術指標,分析真空系統組成及關鍵元器件選型,構建安全可靠的真空發生器系統。
3.1.2 磁力吸附技術
磁力吸附技術重點研究解決磁力吸附單元形成磁場對船舶設備正常運行的影響。針對系泊系統工作特點選用較好永磁材料、合理聚磁技術以及設計最合適的磁路,得到盡可能大的氣隙磁通密度達到較高磁吸力[5],保證吸附單元可靠吸附。
3.2 多自由度船體姿態補償控制技術
對多自由度船體姿態的補償控制技術研究,依據船舶系泊的實際作業環境數據,針對船體因潮汐、風載、過往船舶產生的多自由度姿態變化,提出運動補償及隨動結合的控制方案,構建無纜自動系泊裝置最優補償控制方法、驅動算法及安全聯鎖策略。同時在執行機構部件中合理布置傳感器,確保船體姿態變化超過補償范圍后,系統對相應自由度的船體運動能夠執行主動抑制,確保船舶安全停泊。
3.3 多設備協同作業技術
船舶需要2 個及以上無纜自動系泊單元協同動作才能夠完成船體系泊作業,在依據船舶實際靠岸運動姿態確定系統運行后,各自動系泊單元同時啟動。此時,針對各系泊點不同的運動要求,完成各無纜自動系泊單元吸附動作的協調配合,幫助船舶快速、平穩靠岸。在系泊狀態下依據各系泊點的運動補償完成船體運動抑制,是確保船舶安全、穩定系泊的關鍵。
3.4 系泊安全可靠性設計技術
為確保無纜自動系泊系統作業過程安全可靠,配置激光定位、攝像機等技術感知船舶相對碼頭距離及船舶速度,根據反饋數據調節系泊設備移動速度及后續吸附工作。通過設置力傳感器、位移傳感器等方式對船體運動姿態實時檢測,根據檢測數據預測多船體的多自由度姿態變化情況,及時調整無纜自動系泊系統的系泊狀態,及時開啟系統的補償、抑制功能,確保船舶平穩系泊,人員和貨物安全上下船。
4 未來發展趨勢展望
自動系泊技術發展較為成熟,不僅可用于碼頭系泊,也可應用于海上平臺的大水位差的船舶自動系泊。根據海上平臺海水高度變化,采用浮式系靠泊結構,該結構利用水的浮力作支托,以滿足水位漲落變化的要求[6]。通過浮式自動系泊技術可快速實現貨物裝卸、人員上下、應急撤離及救助等作業活動。
自動系泊技術也可用于海上船舶間靠幫系泊,不僅可提高靠幫作業海況,而且可將靠幫作業時間縮短至1 min 以內[7]。美海軍為改善海上戰略投送人員、車輛、集裝箱傳送時的靠幫環境和提高海上戰略投送效率。已將自動系泊系統用作海上戰略投送,委托凱伏特公司研發船船之間無纜自動系泊系統(MM100E60),產品外形見圖5。該自動系泊系統門限海況3 級,目標海況4 級,由6 套集成在集裝箱內的模塊化試驗樣機組成。目前已完成樣機碼頭試驗工作,試驗情況見圖6,后續可將該技術移植至艦船間靠幫系泊。

圖6 無纜自動系泊系統(MM100E60)樣機試驗
5 結論
本文介紹了國內外無纜自動系泊技術發展情況、無纜自動系泊系統類型及應用情況,并分析了關鍵技術。在此基礎上,展望了自動系泊技術的未來發展趨勢。研究成果可為無纜自動系泊系統的設計與研究提供一定參考。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
