消費級無人機攝影測量技術在露天礦山開采監測中的應用研究
2023-10-18 13:32:50李睿智
科技創新與應用 2023年29期
李睿智,徐 洋
(河北省地質礦產勘查開發局第八地質大隊,河北 秦皇島 066000)
我國擁有數千座露天礦山,其產出的礦石、煤炭等資源對我國的經濟發展具有重要作用,是我國工業生產的重要原材料。同時,礦業產業也是我國的一個重要支柱產業,為提高我國經濟發展速度和質量,保障國家能源安全和資源安全發揮了重要作用。露天礦山開采可能會對周圍環境造成一定影響,包括地表沉降、噪聲振動、產生灰塵等,因此,需要實時了解礦山開采的進度和狀況,監測可以及時發現礦山中的安全隱患,還能優化開采方式,提高開采效率,減少礦業資源浪費[1-3]。
傳統的礦山監測需要人員進入采礦區域進行巡查,存在安全隱患,而無人機可以避免人員進入危險區域,保證巡查過程的安全可靠。因此,巡檢已成為當前礦山監測的主要作業方式,但是傳統的固定翼無人機單次飛行成本較高,且飛手培養難,外業成本高,安全風險大。而消費級無人機的成本相對較低,維護和操作也比較簡便,可以實現自主飛行,在復雜的飛行環境下,消費級小型無人機更靈活安全,能夠完成更加靈活的巡檢任務,應用無人機機巢可以遠程對無人機進行操控,自動實現無人機起飛、巡檢、數據傳輸和降落充電等功能,為礦山管理提供定期的監測巡查和數據采集服務。因此,本文主要針對消費級無人機在露天礦山開采監測中的應用展開研究。
1 相關理論基礎
1.1 消費級無人機
消費級無人機是一種體積小、重量輕、價格較低且易于攜帶和操作的無人飛行器,其主要以個人、業余愛好者和小規模應用為主,用途包括拍攝照片和視頻、科學研究、農業及物流配送等。與行業專用和商用無人機相比,消費級無人機的價格低廉,維護成本低,操作簡單,使得大眾群體也能夠擁有和使用無人機,代表了無人機技術的大眾化趨勢。目前,市場上的消費級無人機主要有遙控小型飛行器、自主導航追蹤無人機、民用無人機等不同類型,主要還是以簡易的飛行控制器為核心,利用遙控器或智能手機應用程序來控制,常見的消費級無人機品牌有DJI、Parrot、Yuneec 和Syma 等。
1.2 傾斜攝影測量技術
無人機傾斜攝影測量技術是以無人機為飛行平臺,并搭載多角度相機,通過航拍獲取目標物清晰完整的影像數據,其改變了傳統航拍技術的限制,有效提高三維模型生產效率,可以更加清晰反映地面實物的實際情況,大幅度降低了三維建模數據獲取的時間、人力和經濟成本。如圖1 所示,圖中PP′為相機主光軸,ON 為被攝點的垂直與地平線方向,t 為PP′與ON 的夾角。當傾斜角度5°
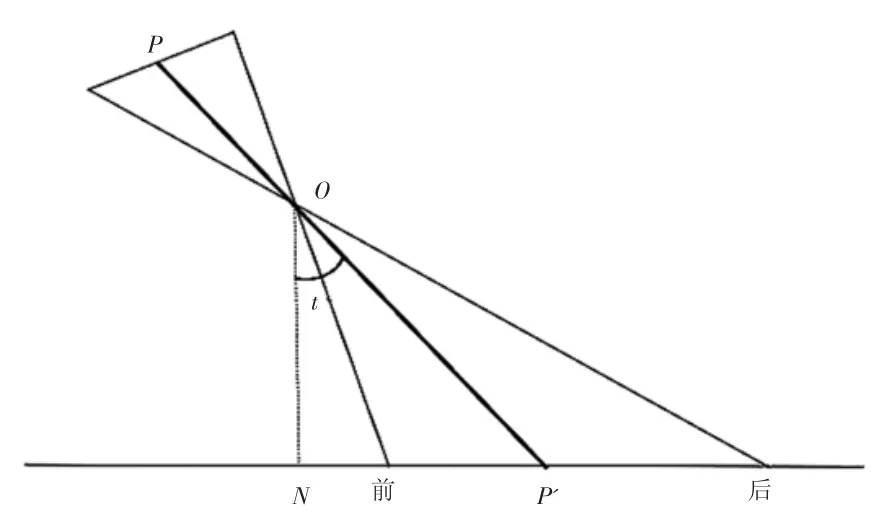
圖1 傾斜攝影傾斜角度示意圖
攝影測量的主要測量對象是地球表面,根據對地面獲取影像時攝像機安放的位置不同,攝影測量可分為航天攝影測量、航空攝影測量、低空攝影測量和地面攝影測量。低空攝影測量一般航高在100~1000 m 之間,低空攝影測量具有成果快、生產周期短、運作成本低和可操作性強等特點,在危險區域圖像實時獲取、土地變化監測、建筑物違章監管、環境監測和應急指揮等方面有著廣泛應用。
1.3 無人機機巢
無人機機巢也叫無人機機庫、無人機機場。傳統的無人機巡檢需要人工現場進行操控,而如果在測區現場布設機巢,實現無人機自動起飛、作業和降落則可以實現礦山開采自動監測。根據無人機的大小,無人機機巢可以分為大型、中型和小型無人機機巢;根據無人機電池的補能形式,則可以分為充電和換電機巢。本次巡檢主要應用到的是小型、充電型無人機機巢。
2 外業數據采集及三維模型重建
2.1 作業區概況
實驗測區位于某市偏遠地區的某小型露天煤礦,礦區面積約為0.5 km2,按照開采規劃要求定期采集地勢變化和土地利用情況數據,幫助礦山管理者制定管理決策。由于測區整體面積較小,本項目擬采用消費級無人機,應用Mini 無人機機巢實現礦山自動監測。整體技術流程如圖2 所示,首先監測管理人員根據巡檢需求和礦區地形情況,確定巡檢范圍和路徑,并將巡檢任務輸入Mini 機巢智能系統中,設定巡檢內容和時間;然后Mini 機巢對無人機下發巡檢任務,無人機飛行到指定位置后執行飛行任務,利用各種傳感器采集相關數數據信息,并上傳到云端進行分析處理;最后無人機完成飛行計劃,自動返航回到機巢進行充電。
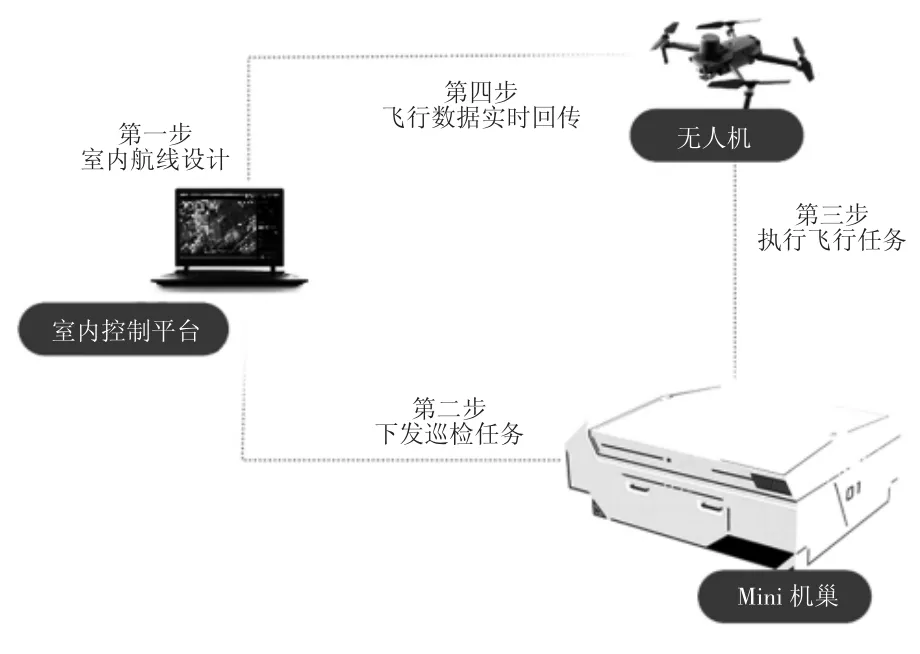
圖2 無人機自動監測流程圖
2.2 傾斜攝影外業數據采集
本次數據采集設備為大疆御Mavic Air2 無人機,該款無人機僅重570 g,屬于小型多旋翼消費級無人機,主要用于娛樂級航拍。該款無人機懸停垂直和水平精度均為±0.1 m(視覺定位正常工作時)、±0.5 m(GPS 正常工作時)。連拍影像分辨率約為1 200 萬像素,最快飛行速度約為19 m/s(運動檔),最長飛行時間約為34 min。無人機機巢選擇的是智方S10 小型無人機自動機場,體積小、重量輕,長寬高均為0.8 m,本項目將無人機機巢安裝在礦區某辦公樓樓頂,距離測區約800 m,無人機及機巢如圖3(a)所示。影像數據采集和內業處理應用的都是某云端控制系統,主要包括3 個主要功能。第一,任務規劃管理。為無人機設置新的飛行任務,同時也可查看歷史所建飛行任務,并對已保存的任務進行編輯;第二,執行任務管理。指派特定的無人機對選擇的任務進行執行,包含地圖顯示、在線無人機、待命無人機、任務執行及飛行操作等。第三,數據管理。對無人機、自動機場、載荷的飛行數據和后期處理作業數據結果進行存儲,并建立管理庫,方便后期進行數據查閱和調用[5]。
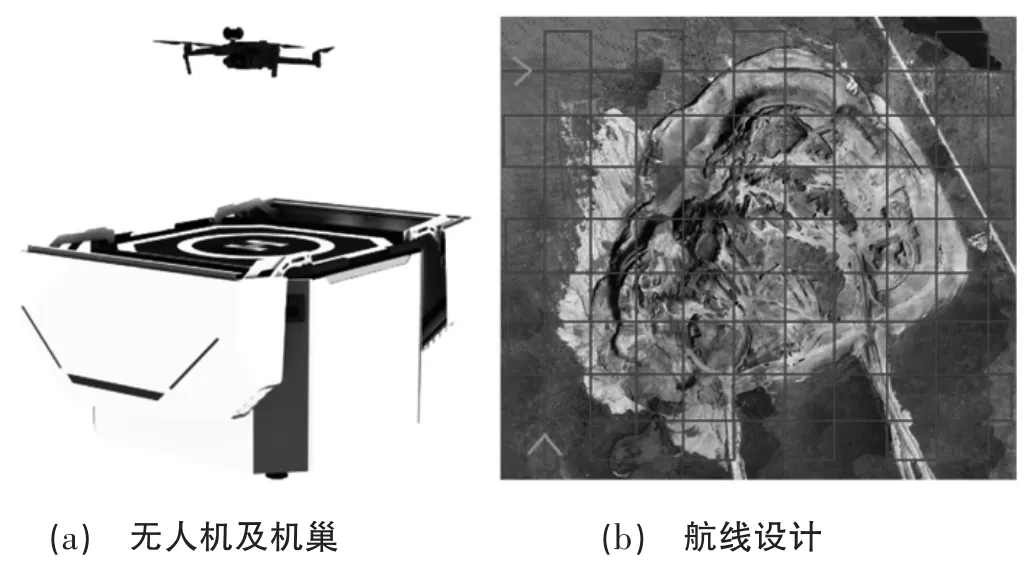
圖3 無人機機巢及傾斜攝影航線設計
首先應用配套云端控制系統先選定拍攝區域,然后使用大疆智能飛行器(御Mavic Air2)采集航拍數據。航拍過程中需要注意飛行高度、拍攝角度等參數的設置,以獲得高質量的航拍數據,飛行高度均設置為100 m,相機傾角分別設置為0°、30°、45°、60°和90°,航線規劃飛行參數見表1[6]。
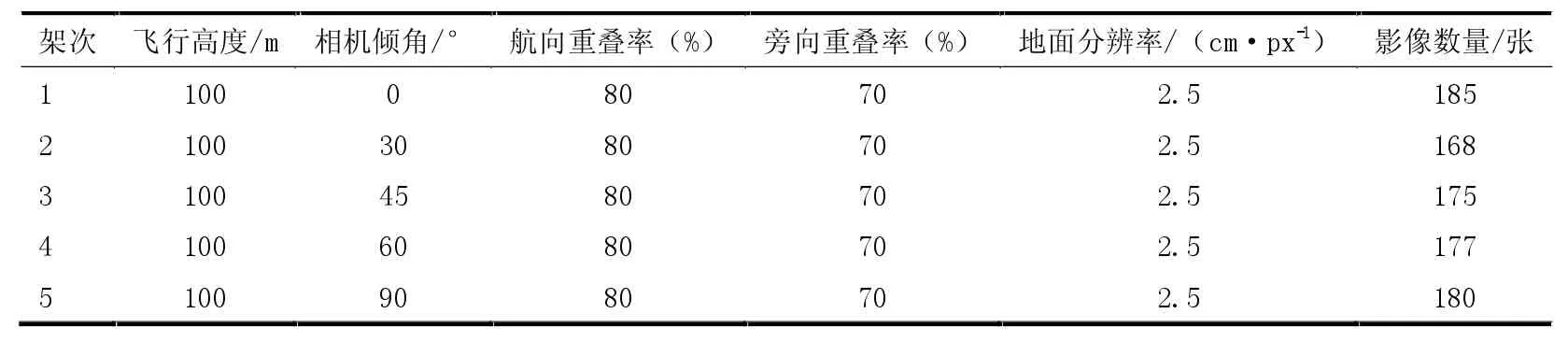
表1 飛行參數設置
本次影像數據采集航線重疊為80%,旁向重疊為70%,并設置“井”字型飛行航線進行數據采集,航線設計如圖3(b)所示。
待無人機飛行任務完成后需根據回傳的影像數據進行傾斜實景三維建模,在云端控制系統中選擇“新建任務-三維建模”菜單,填寫任務名稱,然后任務欄里導入采集好的影像數據,這里需要導入的是多架次采集的航線拍攝圖片;再進行參數設置,包括重建類型、建圖場景、重建清晰度、計算模式和興趣區域建模等,并進行像控點管理,設置像控點坐標系,導入像控點進行像控點刺點;最后刺點完成后,退出像控點管理,提交進行三維重建,等待重建完成,即可獲取實景三維模型。本項目建立的實景三維模型如圖4 所示。
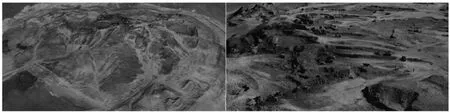
圖4 露天礦山實景三維模型
由圖4 可以看出,傾斜實景三維模型航測的范圍涵蓋了整個礦區,影像成圖分辨率較高,在實景模型上即可對礦山周圍環境、礦山開采規模、開采現狀等信息進行全局掌握。
為檢驗三維模型的數據精度是否符合規范要求,本次共選取8 個校對點位進行數據的比對檢驗。將模型提取的坐標成果與后期人工實測成果進行對比(表2),平面中誤差不超過0.55 m,高程中誤差不超過0.7 m,參照GB/T 7931—2008《1∶500、1∶1 000、1∶2 000 地形圖航空攝影測量外業規范》對礦區傾斜攝影測量模型精度規范,可以看出,基于消費級無人機建立的實景三維模型精度基本滿足相關礦山監測調查要求。
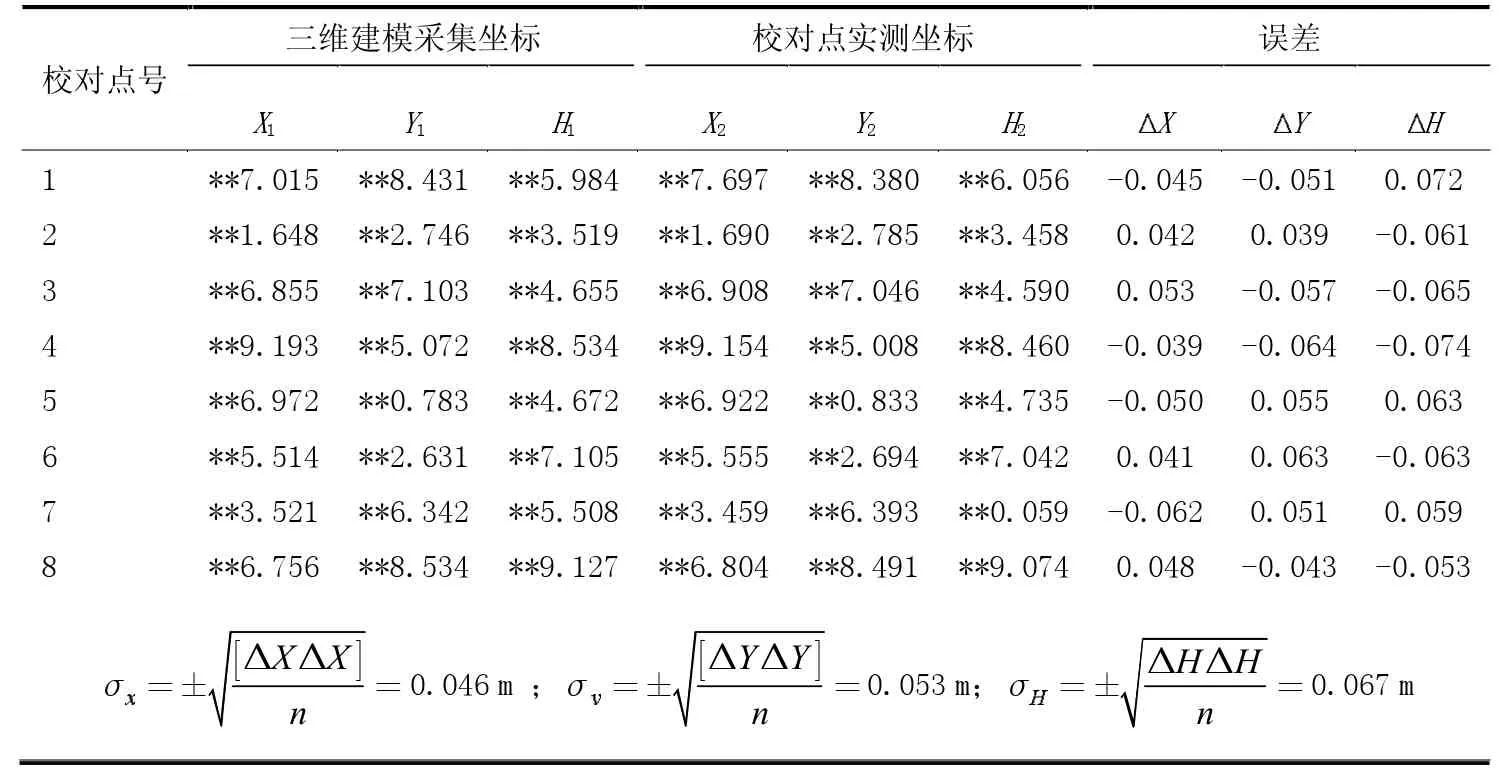
表2 校對點精度統計表m
3 開采監測應用
本項目應用消費級無人機自動執行飛行任務、采集影像數據回傳并建立實景三維模型,實現礦山多方面監測,主要包括以下幾個方面[7-8]。
3.1 工作面和邊坡的監測
首先基于礦區實景三維模型提取出礦山工作面和邊坡的基本信息,采用人工標注的方式,確定礦山工作面和邊坡的位置和范圍,再利用圖像算法和計算機視覺技術對影像進行處理,提取出礦山工作面和邊坡的邊緣以及特征點,獲得精確的工作面和邊坡的信息;然后進行工作面和邊坡的監測,在礦山實景三維模型平臺上,可以實時顯示礦山的開采狀態、工作面形態、邊坡位移等數據信息;最后進行監測分析和反饋,通過對數據進行分析和比對,發現隱含的安全隱患,提前采取措施進行處理,保障礦山生產安全。
3.2 安全監測
基于礦區實景三維模型可以對礦山內外環境的各種信息加以提取和分析,形成各種需要的監測參數,例如巖石表面小型塊狀裂隙矩陣、礦塊挑落傾角、礦山邊坡變形性能等參數,通過對礦山實景三維模型的監測數據的統計、分析和比對,為礦區的生產安全和礦塊資源合理利用提供科學數據支撐,實現對礦山中存在的安全隱患進行監測,包括大型礦坑、豎井、礦井巷道等危險區域進行觀察,并為人員安全預警提供數據支持。
3.3 生態環境監測
基于消費級無人機通過搭載各類氣象監測設備,可以對礦區氣溫、空氣質量、氣壓等氣象數據進行采集和監測;基于礦山實景三維模型,可以采集礦區植物的量化信息,如株高、樹冠寬度、葉面積指數等參數,并監測植被面積、密度覆蓋情況。生態環境監測數據管理和分析可采用礦山大數據平臺,配備專業的數據分析軟件進行監測數據的分析和處理。
3.4 設備監測
未來還可以使用紅外熱成像技術,對照明設備、電氣設備、機械設備進行非接觸式的監測。通過紅外熱成像可以實時捕捉到設備表面的溫度變化,從而及時發現可能存在的問題,預防設備故障和事故。還可以基于礦山實景三維模型建立礦區設備管理平臺,記錄設備設定維護計劃及維護次數,并將計劃時刻表建立在監測平臺進行追蹤管理;同時,監測平臺也可以根據監測到的設備實時狀態數據,實現數據的實時、精準分析,幫助礦工和設備工程師深入了解設備運行狀態的實際情況。
利用消費級無人機進行自動巡檢可以提高礦山的安全性和效率,并且可以大大減少工作人員的風險,為礦山的安全和穩定運行提供有力保障。
4 結束語
綜上所述,使用無人機進行礦山巡檢,可以提高效率、減少安全風險、節省人力物力資源,但是傳統的固定翼無人機對人員操作技能要求高且不適用于小型礦山巡檢,因此本文將消費級無人機應用到礦山監測中實現了礦山自動監測。研究結果表明,消費級無人機進行礦山監測可以減少人工監測人力成本,提高任務效率,為企業提供全方位、高分辨率的數據支持,幫助礦山管理者更全面、高效地了解礦山開采現場情況,實現礦山開采過程的快速、準確監測。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45