基于MVP 架構的工業機器人虛擬仿真系統研究
2023-10-17 08:32:46吳俊強鄒旻
電氣傳動自動化 2023年5期
吳俊強, 鄒旻
(1.珠海市第一中等職業學校,廣東 珠海 519000;2.珠海市理工職業技術學校,廣東 珠海 519000)
目前,很多領域都實現了半自動化、半機械化,甚至少數領域已實現了全機械化、全自動化[1]。工業作為傳統產業的代表,在拉動經濟增長中做出了巨大的貢獻。在當今很多工業生產中,工業機器人被廣泛應用,不僅提高了生產效率,還能夠降低生產風險。工業機器人作為一種較為高端的工業生產設備,其操作難度較大,因此在實際上手操作前,針對工業機器人往往會開展教學培訓。但是工業機器人系統復雜、價格高昂,要是開展實際教學,不僅資源不足,成本也高[2]。若是損壞,維護困難大。將虛擬仿真技術應用于工業機器人操作培訓中可以很好地解決上述問題,極大地模擬了實操行為,讓被培訓者更好地理解工業機器人操作過程。基于此,關于虛擬仿真技術在工業機器人的應用中研究有很多。例如,用于采摘機器人當中,設計了一種機器人虛擬仿真平臺并重點研究了采摘機械手路徑優化問題[3];應用于汽車焊裝機器人控制當中,借助Tecnomatix數字化虛擬仿真軟件,搭建機器人虛擬模型,對多機器人焊接過程進行仿真[4]。本文結合前人研究經驗,開發并設計了一款工業機器人虛擬仿真系統。通過該系統設計以期解決當下工業機器人操作培訓困境,提高學習培訓質量。
1 基于虛擬仿真技術的工業機器人操作系統研究
工業機器人系統結構復雜、操作難度大,要想熟練掌握其操作,進行操作培訓是必不可少的。然而,由于工業機器人價格昂貴,要想對每個人進行實操訓練難以實現。為此,開發并設計了一種工業機器人虛擬仿真系統,該系統開發與設計主要分為三部分,即框架搭建、硬件設計、功能模塊設計。
1.1 系統框架搭建與設計
以MVP架構為指導,設計工業機器人虛擬仿真系統的三層框架結構,即下端基礎數據層、中端作業管理層以及上端操作控制層。
(1)下端基礎數據層存儲了大量的基礎數據,包括工業機器人結構參數數據、運動空間數據、操作口令等,為虛擬仿真操作奠定基礎。
(2)中端作業管理層中包括了各種業務邏輯模型,主要負責虛擬工業機器人的運動和作業,建立與上端操作控制層的通信連接。
(3)上端操作控制層主要為用戶服務,在用戶的控制下,實現對虛擬工業機器人的運動控制,實現作業過程的仿真,從而達到訓練的目的。
1.2 系統硬件設計
系統硬件是指系統中的物理設備,是軟件程序和功能實現的外在載體。本系統以PLC作為核心在三維建模的基礎上,通過通信設備實現用戶虛擬操作設備與仿真工業機器人之間的聯通,控制仿真工業機器人進行各種作業[5]。在整個系統硬件中,有兩個關鍵物理設備:
一是虛擬操作設備,其作用是現實用戶與虛擬機器人之間聯動的載體,包括VR眼鏡、虛擬交互手套。VR眼鏡的作用是讓現實中的用戶能夠看到虛擬場景中的一切虛擬事物,包括工業機器人、工件、操作臺等;虛擬交互手套是現實用戶能夠控制虛擬空間中虛擬事物動作的載體,可進行虛擬場景中物體的抓取、移動、旋轉等,是工業機器人虛擬操作培訓實現不可缺少的硬件。
二是虛擬仿真機器人建模數據采集設備。虛擬場景的構建是虛擬操作過程不可缺少的。要想更為真實地模擬現實工業機器人的實操,就要在虛擬空間中將現實場景一比一還原,這樣能夠極大增強訓練者的真實感和沉浸感,讓虛擬操作更加接近真實情況[6]。本系統中選用的虛擬仿真機器人建模數據采集設備為激光掃描儀。針對工業機器人以及機器人所在的工業場景進行激光掃描,獲取其點云數據。借助建模工具,基于點云數據實現虛擬場景建模。
1.3 功能模塊設計
功能模塊隸屬于系統軟件設計的一種,是系統各種業務邏輯運行的基礎。本系統關鍵功能模塊有兩個,即虛擬建模模塊以及仿真操作與控制模塊。下面對這兩個關鍵功能模塊的設計過程進行具體分析。
1.3.1 虛擬建模模塊
虛擬建模模塊即針對現實中工業機器人及其工作場景在虛擬空間中建立對應的仿真模型,具體過程如下:
步驟1:設置激光掃描儀工作參數。
步驟2:利用激光掃描儀掃描工業機器人及其工作場景的點云數據。
步驟3:對點云數據預處理,包括去噪和約簡兩個步驟。前者去除噪聲點數據。采用的方法為雙邊濾波方法,去噪公式如下:
其中,
式中,xi、xi′代表去噪前、后的點云數據;yj代表靠近xi的第j個鄰近點;ri代表xi的法向;M(xi)表示Si鄰域點的隸屬度;S表示xi-yj與xi法向ri的內積;v和v^代表雙邊濾波的參數;w代表雙邊濾波的權重因子。
后者約簡是指去除不重要的點云數據,降低其數量,減少后續計算量。在這里可以通過建立立方體網格的方法實現。首先確定空間點采樣間隔,記為T;然后搜索三個方向的極值點,建立所有空間點的外接立方體。根據T將外接立方體劃分為若干小立方體。最后對每個小立方體進行遍歷,判斷其中是否存在唯一的空間點,若存在唯一的空間點,則保留不變;否則,確定這些點的重心點,然后計算這些點與重心點之間的距離值,其中最近的點保留,其余篩除,完成點云數據約簡[7]。點與重心坐標的距離值計算公式如下:
式中,dio代表第i個點云數據與重心坐標之間的距離;(xi,yi,zi)代表第i個點云數據的三維坐標;第i個點云數據代表重心點的三維坐標。
步驟4:進行點云配準。
步驟5:根據點云進行三維虛擬模型建立,過程如下:
(1)在點云中搜索最優內插中心點,記為Ai;
(2)確定Ai的最優支撐域B(Ai);
(3)在各內插中心Ai,以支撐域B(Ai)為半徑建橢球體,分解點云單元;
(4)在各橢球體內用待求函數對曲面局部逼近;
(5)用CS-RBF函數對各相鄰橢球體的局部逼近曲面加權擬合,得到空間曲面模型,即三維虛擬框架模型。
步驟6:對三維虛擬框架進行紋理映射,使其更接近真實物體。
步驟7:對整個虛擬場景進行渲染,使得虛擬場景更加“真實”。
1.3.2 仿真操作與控制模塊
在完成加工業機器人及其工作場景的虛擬建模之后,用戶穿戴好虛擬操作設備,通過通信設備與虛擬場景進行聯通,就可以進行仿真操作與控制[8]。具體過程如圖1所示。
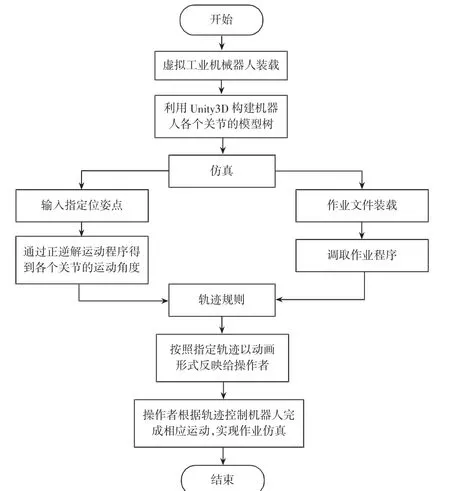
圖1 仿真操作與控制流程
按照上述流程,用戶就可以對虛擬空間中的工業機器人進行操作,控制其完成各種作業,實現模擬訓練。
2 系統實現與測試
2.1 工業機器人概況
工業生產中最常見的工作之一就是對工件進行分揀,因此分揀機器人發展得較為成熟。隨著分揀對象的越來越小,越來越脆弱,對分揀機器人的作業精度有了更高要求,因此操作難度更大。為此,以分揀機器人為對象,測試本系統的性能。該分揀機器人為6軸機械臂形態,各關節具體參數如表1所示。

表1 機器人各自關節運動參數
2.2 機器人運動路線
以一個5mm的球形零件作為分揀對象,假設將其從工作臺A移動到工作臺B。分揀機器人各個關節的實際運動曲線如圖2所示。

圖2 分揀機器人各個關節規劃運動曲線圖
2.3 系統性能測試結果
建立虛擬場景后,控制虛擬分揀機器人完成一系列分揀動作,然后統計虛擬分揀機器人各個關節軸的動作與實操動作的偏差。偏差越大,說明虛擬分揀機器人并不能準確地模擬現實中分揀機器人的分揀動作,二者不能同步。而虛擬仿真系統最關鍵的就是讓模擬機器人的動作與現實中機器人的動作越一致越好,否則就達不到虛擬訓練的目的。選擇分揀動作過程中10個時間點各關節運動數據,然后計算偏差絕對值,最后計算平均值,結果如表2所示。

表2 系統性能測試結果
從表2中可以看出,所設計系統應用下,虛擬機器人與實際機器人各關節運動數據之間的偏差絕對值均值都小于0.1mm,由此說明該系統控制下,虛擬機器人的分揀動作基本與實際保持一致,證明了系統的性能。
3 結論
工業機器人的使用雖然能夠提高生產效率,但前提是能夠熟練操作和運用,否則更容易出現工作失誤,因此需要進行實操培訓。而進行實操需要花費很大的成本,為此,進行工業機器人虛擬仿真系統開發與設計研究。該研究通過控制虛擬空間中的模型來達到訓練目的,最后對系統進行測試,通過計算偏差證明了系統的性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17