轉子圓度誤差對四自由度AMB的穩定性影響
2023-10-10 02:13:26丁翔宇范啟富
測控技術 2023年9期
丁翔宇, 范啟富
(1.上海交通大學 電子信息與電氣工程學院,上海 200240; 2.昕諾飛(中國)投資有限公司,上海 200233)
相比傳統軸承,主動磁懸浮軸承(Active Magnetic Bearing,AMB)具有無摩擦、無污染、允許轉速高和使用壽命長等優點,性能顯著優于傳統軸承,被廣泛應用于航空航天領域和半導體制造等工業領域[1]。
為了減小磁浮電流從而減少線圈發熱,大多數AMB系統中,電磁鐵與轉子的間隙都在0.5 mm以下。為了保證穩定的主動懸浮, AMB對機械部分的加工精度以及定子與轉子之間的裝配精度提出很高的要求,但這些高要求極大地增加了電磁軸承的加工難度和成本。分析常見的加工誤差對AMB性能的影響,以及分析通過改進控制方式降低加工誤差的影響,具有重要的意義。
轉子圓度誤差是AMB加工誤差中的常見形式。但是前人在轉子圓度誤差對AMB控制系統穩定性的影響方面的研究成果較少。崔東輝等[2]對位移傳感器檢測面的圓度誤差進行了分析,給出了轉子轉動時干擾電流的形式,得出了圓度誤差越大干擾電流越大的結論,但是沒有分析圓度誤差對穩定性的影響。胡林福等[3]研究了存在圓度誤差的轉子在不同轉速下的振動響應,并嘗試通過調整PID參數對振動進行抑制,但沒有說明調整參數的理論依據。
因為AMB是開環不穩定的系統,必須通過閉環控制才能實現轉子的穩定懸浮,所以控制器的設計是AMB設計的關鍵環節。目前,雖然有多種控制方法用于AMB的控制,例如線性二次型調節器(Linear Quadratic Regulator,LQR)控制[4]、滑模控制[5]、無模型控制[6]、魯棒控制[7]和模態解耦控制[8]等,但是這些控制方法均有不足之處。例如LQR控制器的加權矩陣難以選取;魯棒控制方法的控制器階數高,不易實現;模態解耦采用比例微分(Proportional Derivative,PD)控制,而實際應用中通常需要積分環節消除靜態誤差。因此PID控制仍然是AMB中使用最廣泛的控制方法,也是本文所采用的控制方法。
由于前人在工作中并未研究轉子圓度誤差對四自由度AMB穩定性的影響,也沒有給出轉子圓度誤差導致不穩定的解決方法,因此,本文的目標是研究轉子圓度誤差對四自由度AMB的穩定性影響,若圓度誤差導致四自由度AMB不穩定,須研究如何使系統恢復穩定。本文通過建立四自由度AMB的轉子數學模型,基于PID控制方法推導了四自由度AMB的閉環特征方程,通過閉環特征方程系數的性質,分析了轉子圓度誤差和PID控制參數對四自由度AMB穩定性的影響,最終通過仿真和實驗證實了理論的正確性。成果既可為四自由度AMB轉子容許圓度誤差的確定提供參考,同時為四自由度AMB中PID參數的確定和優化提供了依據。
1 四自由度AMB剛體轉子的建模
四自由度AMB采用了立式AMB裝置,轉子可以簡化成理想的物理模型[9],如圖1所示。轉子兩端所受電磁力作用于轉子,A端和B端是電磁力作用于轉子的位置,徑向4個自由度分別為XA、YA、XB、YB,軸向的自由度為Z。OA和OB分別是轉子在A端和B端的質心,O為轉子的質心。
從圖1可以看出,Fxa、Fxb、Fya、Fyb分別為四個自由度所受的電磁力合力;la、lb分別為A端和B端質心到轉子質心O的距離;θx、θy、ω分別為轉子繞x軸和y軸轉動的角度以及繞z軸轉動的角速度。
從圖1可以看出,由轉子的牛頓第二定律,根據轉子A端和B端受力和力矩的作用,可以推出四自由度AMB轉子理想情況下的動力學模型[10]為
(1)
式中:m為轉子的質量;J、Jz分別為轉子徑向和軸向的轉動慣量;x、y分別為轉子質心在x軸和y軸方向的位移。
由圖1中轉子平動和轉動的關系[11]可得:
(2)
式中:xa、xb、ya、yb分別為轉子在XA、XB、YA、YB自由度上的位移。
對各自由度在平衡位置附近進行線性化[12],得到:
{Fxa=kx_xaxa+ki_xaixaFxb=kx_xbxb+ki_xbixbFya=kx_yaya+ki_yaiyaFyb=kx_ybyb+ki_ybiyb
(3)
式中:ixa、ixb、iya、iyb分別為XA、XB、YA、YB自由度上電磁鐵的差分電流;kx_xa、kx_xb、kx_ya、kx_yb分別為轉子在XA、XB、YA、YB自由度上的力-位移系數;ki_xa、ki_xb、ki_ya、ki_yb分別為轉子在XA、XB、YA、YB自由度上的力-電流系數。
整理式(1)~式(3)可得:

(4)
式中:
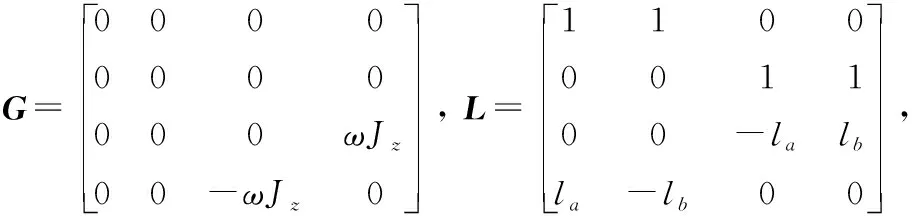
式(4)描述的狀態空間模型中,因為qi產生電磁力,電磁力決定了輸出量qx,所以該狀態空間模型的輸入為qi=[ixa,ixb,iya,iyb]T,輸出為qx=[xa,xb,ya,yb]T。
2 理論分析與推導
為研究轉子圓度誤差對穩定性的影響,首先,分析圓度誤差對四自由度AMB參數的影響;然后,推導四自由度AMB的閉環特征方程,分析四自由度AMB的閉環穩定性與哪些參數相關;最后,分析圓度誤差對四自由度AMB穩定性的影響。
2.1 轉子圓度誤差的影響分析
轉子的圓度誤差用于描述轉子在垂直于轉軸的截面上,輪廓相對其理想圓的偏差量。本文中假設軸承由于圓度誤差,截面形狀為橢圓形,且轉子模型中A端和B端位置的圓度誤差一致。
需要注意的是,當每個自由度只有一個位移傳感器時,會產生干擾電流。為了消除圓度誤差產生的干擾電流,每個自由度用一對位移傳感器,而不是一個位移傳感器[2]。
圖2為轉子的圓度誤差示意圖。A端截面應為半徑為R的圓,但由于機械加工的圓度誤差,實際轉子表面的x方向直徑比y方向直徑長2ε,則圓度誤差為ε。
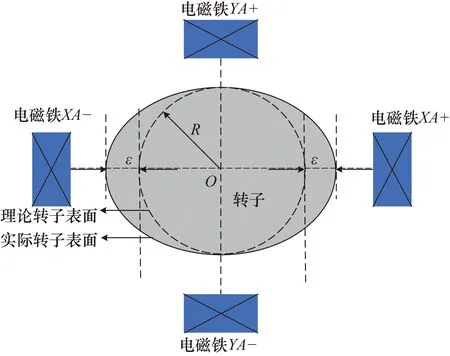
圖2 轉子的圓度誤差示意圖
圖3為轉子相對水平位置轉動θ后電磁鐵與轉子間隙示意圖。

圖3 轉子轉動后電磁鐵與轉子間隙示意圖
從圖3可以看出,電磁鐵到轉子的間隙g隨轉子轉動的角度θ發生變化[2],為
g=x0-εcos2θ,θ∈[0,2π]
(5)
式中:x0為轉子在平衡位置時電磁鐵與轉子的間隙。
轉子在平衡位置處的線性化模型中,力-電流系數ki和力-位移系數kx的表達式如下:

(6)
根據式(5)和式(6), 當ε>0時,可得:
(7)
式中:k為電磁力系數;α為電磁鐵與中軸的夾角的半角;I為電磁鐵的偏置電流。
(8)
根據式(6)~式(8),可得出力-電流系數ki、力-位移系數kx與圓度誤差的關系,如圖4所示。
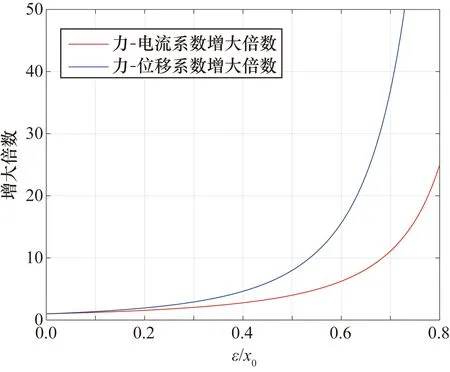
圖4 不同圓度誤差下ki和kx的增大倍數

因為AMB的轉子是車床加工,如果加工誤差中只有圓度誤差,則加工誤差等于圓度誤差的2倍,為2ε。
隨著加工精度降低,圓度誤差迅速增大。當加工精度不高時,即使是細轉子,圓度誤差也會對ki和kx產生顯著影響。

因此,關于圓度誤差對ki和kx影響的研究,當AMB轉子加工精度較低,尤其是AMB轉子尺寸較大時,是非常必要的。
2.2 單自由度AMB的閉環穩定性分析
由于分析四自由度AMB的穩定性需要參考單自由度AMB,并且四自由度AMB的控制參數選取需要參考單自由度AMB,因此,必須先分析單自由度AMB的穩定性,然后在此基礎上分析四自由度AMB的穩定性。
單自由度AMB的物理模型如圖5所示。
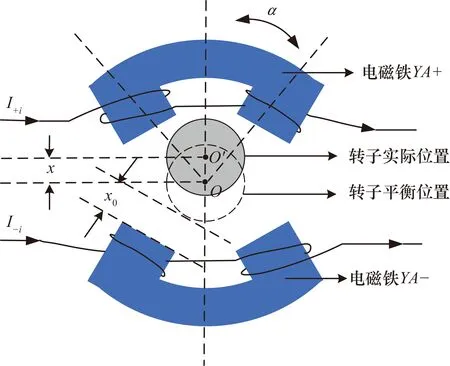
圖5 單自由度AMB的物理模型
圖5中,x為轉子實際位置相對于平衡位置的位移;i為電磁鐵中的差分電流。
吸引力的合力為
(9)
式中:∑F(x,i)為轉子相對平衡位置位移為x,電磁鐵差分電流為i時,所受的電磁力合力;N為電磁鐵的圈數;μ0為空氣的磁導率,大小為4π×10-7(H/m);Ae為電磁鐵的截面積。
在x=0,i=0處,將∑F(x,i)進行線性化可得:
∑F(x,i)=kii+kxx
(10)
當不考慮外界擾動,對于AMB系統,輸入為電流i,輸出為位移x,可得:
(11)
由式(11)和式(9)可得AMB開環傳遞函數為
(12)
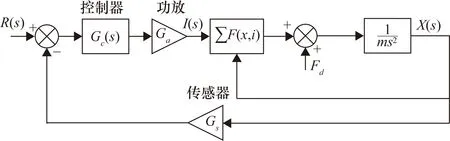
圖6 單自由度AMB的閉環控制框圖
圖6中,R(s)為參考信號;X(s)為AMB轉子的位移;I(s)為AMB線圈的差分控制電流;Gc(s)為控制器的傳遞函數;Ga為功放的放大倍數;Gs為傳感器的放大倍數;Fd為外界擾動力。
不考慮外界擾動,則Fd=0,則有
I(s)=(R(s)-X(s)Gs)Gc(s)Ga
(13)
將式(12)代入式(13)可得:
(14)
因為采用PID控制,可得:
(15)
式中:kP為比例項;kI為積分項;kD為微分項。
將式(15)代入式(14)后整理可得單自由度AMB閉環傳遞函數為
(16)
勞斯表第1列如表1所示。
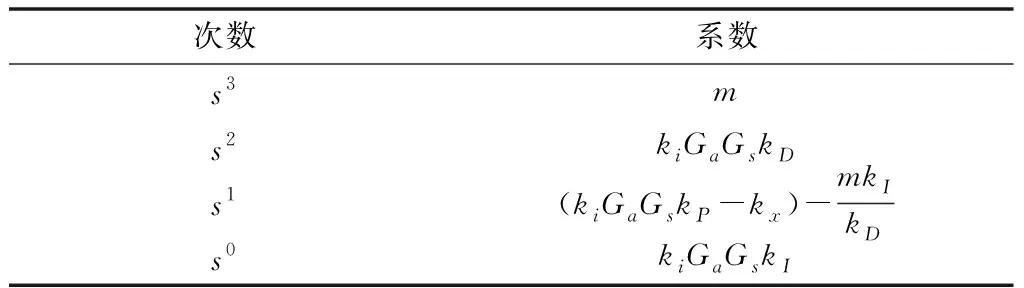
表1 勞斯表第1列
根據勞斯判據,單自由度AMB閉環系統穩定的充分必要條件為第1列系數全為正。根據表1可得單自由度AMB穩定的充要條件為
(17)
分析式(17)中各式的成立條件,具體如下。
不等式(1)、不等式(2)、不等式(4):kI>0,kD>0即可。
2.3 四自由度AMB的閉環穩定性分析
基于對單自由度穩定性的分析,將分析擴展到四自由度AMB。
分析基于以下前提條件:
① 四自由度AMB轉子為質量均勻分布的剛體,適用于式(4)的數學模型。
② 擾動較小,此時才能近似成線性系統分析。
③ 由于研究的是轉子靜止狀態,并且AMB系統徑向轉動慣量一般為軸向轉動慣量的10倍左右,忽略陀螺效應,X方向和Y方向解耦。
四自由度AMB的閉環控制框圖如圖7所示。

圖7 四自由度AMB的閉環控制框圖
圖7中,R(s)為參考信號向量;P(s)為四自由度AMB的數學模型對應的傳遞函數矩陣;Gc(s)為控制器的傳遞函數矩陣;Ga為功放的放大倍數矩陣;Gs為傳感器的放大倍數矩陣;Fd為外界擾動力向量,不考慮外界擾動,則Fd=0。上述變量的表達式為
(18)
式中:Gxa(s)為XA自由度的控制環節的傳遞函數;kP_xa、kI_xa、kD_xa為XA自由度的PID控制參數;Ga_xa為XA自由度功放的放大倍數;Gs_xa為XA自由度傳感器的放大倍數;其余參數分別是其他3個自由度的對應參數,不加贅述。
式(4)通過拉氏變換并整理可以得到:
qx=(ML1s2-LKx)-1LKiqi
(19)
設:
P(s)=(ML1s2-LKx)-1LKi
(20)
則式(19)可寫為
qx=P(s)qi
(21)
因為四自由度AMB要求轉子在4個自由度都處在平衡位置,因此輸入R(s)=[0,0,0,0]T,代入得到:
qi=(0-Gsqx)Gc(s)Ga
(22)
由式(21)和式(22)可推得:
qx=P(s)qi=-GsGaP(s)Gc(s)qx
(23)
由此可得:
qx(I+P(s)GsGaGc(s))=0
(24)
令A=I+P(s)GsGaGc(s),則A為四自由度AMB的閉環特征方程矩陣。
(25)
式中:
2.4 PID參數設計與圓度誤差影響的分析
四自由度AMB系統穩定的必要條件是D(s)各項系數大于0,于是分析式(25)中系數a0~a6均大于0的條件。其中,a0、a1和a6的形式比較簡單;為了簡化a2~a5的分析,分析基于以下兩個假設。
①XA自由度和XB自由度的各參數相同;
② 由式(6),若cosθ=1,則有
(26)
將式(26)代入式(25)中,簡化后a2~a5為
(27)
通過分析式(25)~式(27),可以得到以下結論。
① 根據式(25),由a0的表達式,a0>0一定成立;由a1的表達式,若a1>0,則4個自由度各自的PID的微分項必須不全為0;由a6的表達式,若a6>0,4個自由度各自的PID的積分項必須各自大于0。
② 根據式(27),a2和a4表達式中含有大的正項,因此容易滿足大于0;但圓度誤差ε仍然不能太大。當ε增大至接近x0,式(26)迅速變大,a2和a4可能小于0,導致四自由度AMB系統進入不穩定狀態。
③ 根據式(27),a3>0,則kP_xa不能太小,且最重要的是kx_xa不能太大,也即圓度誤差ε不能太大。
④ 根據式(27),a5>0,則kP_xa不能太小,且圓度誤差ε不能太大。
⑤ 由于a3和a5的表達式不包含較大的正項,因此a3和a5比其他參數更難滿足大于0的條件。為保證系統穩定,kP_xa不能太小,且圓度誤差ε不能太大。
⑥ 由a2~a5的表達式均可發現:當圓度誤差過大而導致系統進入不穩定狀態時,可以通過增大PID參數中的kP_xa使系統恢復穩定。
3 仿真
3.1 仿真參數的選取
仿真參數按照實際AMB系統的參數選取,如表2所示。
在確定四自由度AMB的PID控制參數時,可以先選取單自由度的參數,初始狀態下將4個自由度設為相同。
代入表2的參數,根據式(10)計算得到平衡位置處ki=19.22,kx=32683。根據式(17)中單自由度系統穩定的充分必要條件,代入參數計算得到:PID參數的取值范圍是:kP>0.03,kI>0,kD>0。
根據前文的分析,kP可以在滿足取值范圍的基礎上略微加大。初始PID參數不妨選取為:kP=0.1,kI=0.01,kD=0.01,并將每個自由度的初始PID參數設為相同。
由于轉子在平衡位置時的間隙為0.25 mm,為了避免機械上的干涉和電磁鐵飽和,仿真中圓度誤差ε的取值不大于0.2 mm。
由于AMB為鎮定系統,為考察其穩定性,采用單位階躍信號[13]作為外部擾動,因此外部擾動的大小取單位階躍信號。
3.2 圓度誤差對四自由度AMB穩定性的影響
當ε分別為0 mm、0.1 mm和0.2 mm時,代入式(25)計算A11的行列式,四自由度AMB的特征多項式D(s)的系數的正負,如表3所示。

表3 不同圓度誤差下D(s)的各項系數正負
由表3可以看出,當ε為0 mm或0.1 mm,系數全為正數,系統滿足穩定的必要條件;當ε為0.2 mm,系數a3和a5為負數,系統不穩定。
假設外部干擾為單位階躍信號,0.1 s時施加在AMB仿真模型的XA自由度。對無圓度誤差,圓度誤差ε為0.1 mm、0.2 mm時的系統穩定性進行仿真,得到的結果如圖8所示。
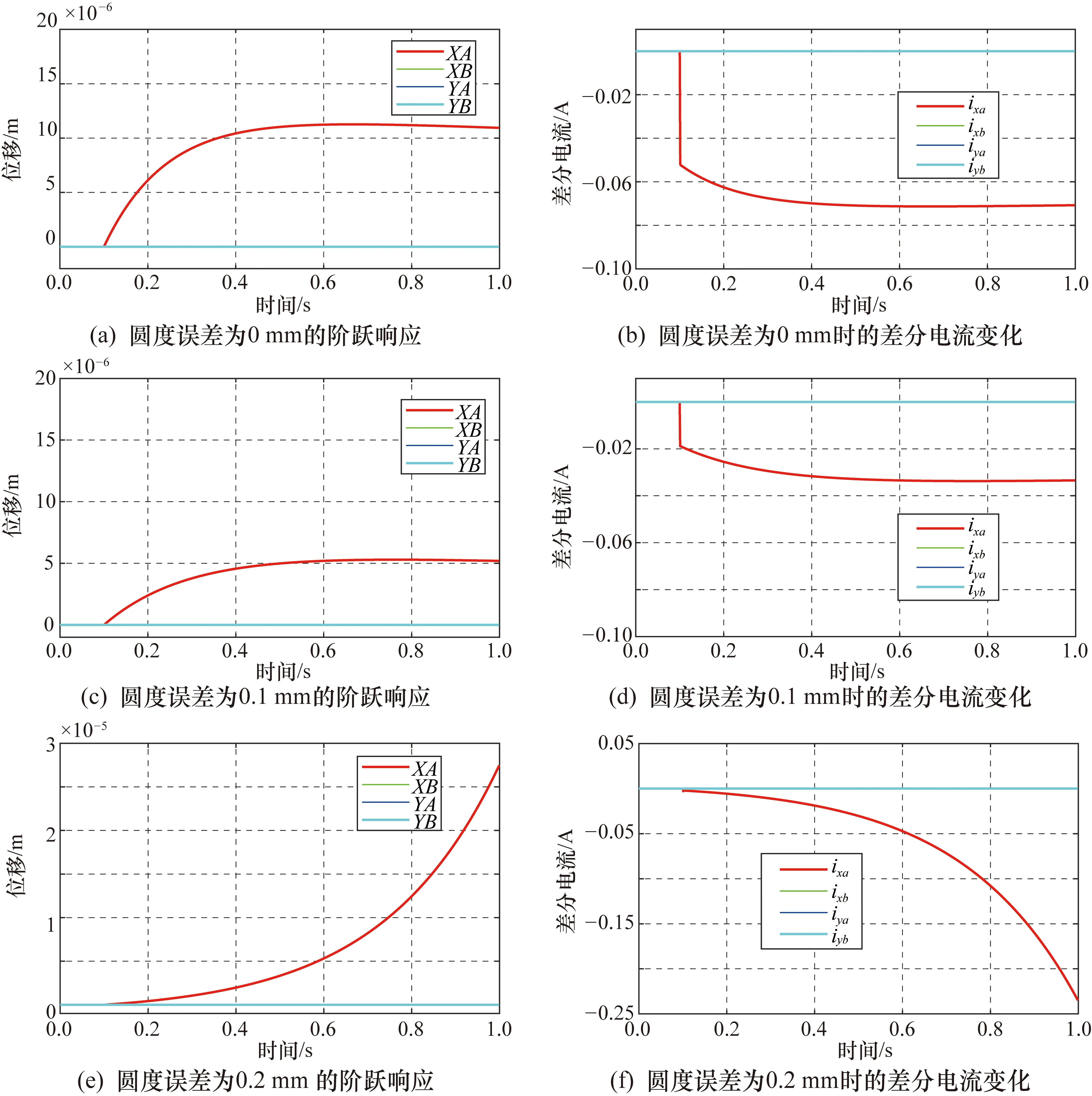
圖8 圓度誤差分別為0 mm、0.1 mm、0.2 mm時的穩定性比較
圖8中,XA、XB、YA、YB為qx=[xa,xb,ya,yb]T中的4個自由度的位移,是系統的輸出量;ixa、ixb、iya、iyb為qi=[ixa,ixb,iya,iyb]T中的4個自由度的差分電流,是系統的控制輸入。
由圖8的仿真結果可知:
① 當單位階躍信號于0.1 s施加之后,只有XA自由度產生位移變化和差分電流變化,XB、YA、YB自由度沒有產生位移變化和差分電流變化。
② 當圓度誤差ε為0 mm或者0.1 mm時,四自由度AMB系統可以穩定;ε為0.1 mm時,由于更大的力-電流系數和力-位移系數,達到平衡時位移更小,差分電流也更小,說明系統剛度大,更容易穩定。
③ 當ε達到0.2 mm時,XA自由度不收斂,系統不再穩定。
④ 參照表3,當ε為0.2 mm時,閉環特征方程的分母多項式系數不全大于0,四自由度AMB無法穩定;仿真中ε為0.2mm時也是不穩定的。仿真結果和理論分析是吻合的。
3.3 調整PID參數使四自由度AMB系統穩定
基于3.2節中的仿真結果,當圓度誤差過大,四自由度AMB會不穩定;由2.4節的結論⑥可知,當圓度誤差過大而導致系統進入不穩定狀態時,可以通過增大PID參數中的kP使系統恢復穩定。
將kP從0.1調至1,此時的PID參數為:kP=0.1,kI=0.01,kD=0.01。通過計算,這套PID參數下D(s)所有系數為正。
當ε為0.2 mm,仿真比較kP=1和kP=0.1系統的穩定性,得到仿真結果,如圖9所示。

圖9 圓度誤差同為0.2 mm時,kP為1的仿真結果
將圖9的仿真結果與圖8(e)和圖8(f)進行對比,可以看出,當圓度誤差ε同為0.2 mm時,通過將kP從0.1增大到1,XA自由度的位移由發散變為收斂,四自由度AMB恢復穩定。仿真結果和理論分析是吻合的。
4 實驗
4.1 實驗平臺介紹
采用了AMB實驗平臺,如圖10所示。實驗平臺由上位機、磁懸浮裝置、控制板(搭載DSP28335)、信號處理板、信號轉接板和功率放大電路等組成;此系統中轉子存在較大的圓度誤差,定子和某些位置的傳感器存在其他類型的加工誤差和裝配誤差;系統的主要參數如表2所示。
4.2 復現圓度誤差導致的不穩定
先調節推力盤自由度的控制電流,使轉子在軸向達到懸浮;再將徑向4個自由度的PID參數均設置為kP=0.1,kI=0.01,kD=0.01。轉子旋轉一周,在此過程中XB自由度的位移波形如圖11所示。

圖11 轉子旋轉一周XB的位移波形
實驗結果表明,轉子在轉動一圈的過程中,大部分區域穩定,8~13 s發生了振蕩。
基于圖11中實驗中轉子旋轉了一周,XB自由度大部分時間都是穩定的,說明PID參數的選擇沒有問題。XB自由度在轉至特殊位置附近不穩定,說明轉子這個位置附近加工誤差比較大。轉動過程中,當轉子的這個位置正對XB自由度電磁鐵時,系統進入不穩定狀態。此轉子的加工過程中,圓度誤差是主要的機械誤差,于是認為實驗中的不穩定狀態是由轉子圓度誤差引起的。
4.3 調整合適的PID參數
根據前文仿真的結果,增大kP能夠更好地保證四自由度AMB的特征多項式D(s)所有系數為正,對系統穩定有幫助,因此將kP從0.1調為1。
由于實際系統采用數字控制,信號的采樣、保持和處理均有延時,電磁鐵的電流滯后于電壓,因此需要增大微分環節,抵消各種延時對系統穩定性的影響,將kD從0.01調為50。
將4個自由度的PID參數設置為:kP=1,kI=0.01,kD=50。
將轉子位于圖11中振蕩的區域,轉子初始時就處于不穩定狀態;更新PID的參數,觀察XB自由度的波形的變化。PID參數改變前后,XB的位移波形如圖12所示。
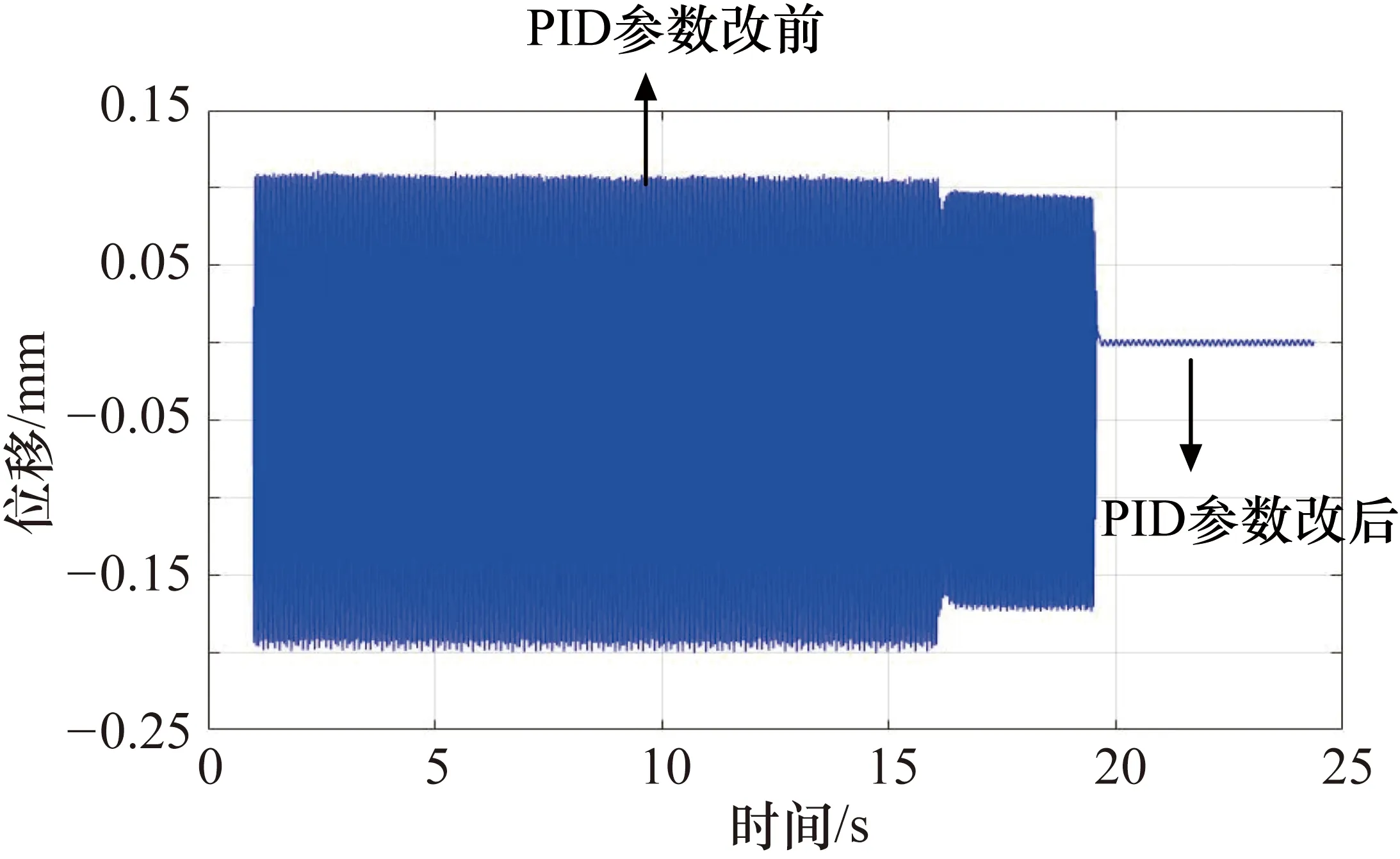
圖12 PID參數改變前后XB的位移波形
由圖12可以看出,在PID參數改變前,該自由度一直在振蕩;在PID參數改變完成后,XB自由度在改變參數后恢復穩定。
重新將轉子旋轉一周,轉速和4.2節中實驗的轉速相近,得到新的PID參數下的XB的位移波形,如圖13所示。

圖13 PID參數調整后,轉子旋轉一周XB的位移波形
由圖13可以看出,振蕩發生的時間段為25~31 s,轉動經過振蕩區域的時間共6 s,與圖9中的振蕩時間5 s相近,因此轉速和實驗4.2節的轉速相近。這說明了兩次實驗條件是相近的,保證了實驗結果的可信度。
對比圖11和圖13可以發現,調整PID參數之后,轉子在相同區域仍然有振蕩,但是振蕩幅度在-0.1~0.1 mm,比調整PID參數之前的-0.29~0.25 mm顯著減小。因此合理選取PID參數可以幫助四自由度AMB在圓度誤差較大時仍然保持穩定。
5 結束語
提出了一種可用于分析圓度誤差對四自由度AMB穩定性影響的方法,過程如下。
① 基于四自由度AMB轉子的數學模型和PID控制,推導四自由度AMB的閉環特征方程A。
② 計算閉環特征方程A的子塊A11的行列式det(A11),通過其分母多項式D(s)的系數的正負,判斷是否滿足系統穩定的必要條件。
③ 圓度誤差ε會通過力-電流系數和力-位移系數影響D(s)系數的正負,PID控制參數會直接影響D(s)系數的正負,兩者都影響四自由度AMB的穩定性。
④ 當圓度誤差ε過大時,D(s)系數中出現負項,四自由度AMB的仿真結果不穩定;但是通過調節PID參數,D(s)系數全正,四自由度AMB的仿真結果重新穩定,仿真結果與理論分析一致。
⑤ 實驗使用了較大圓度誤差的AMB實驗平臺,發現在某些區域存在不穩定的現象。通過參考理論分析中提出的方法,調整了PID參數,系統重新穩定,證實了理論分析和仿真的準確性,也證實了所提出的方法的實用價值。
但是本文提出的方法存在改進的空間,具體如下。
① 對高速旋轉的轉子,不同自由度存在著陀螺效應帶來的耦合,該方法不能用于分析圓度誤差對高速旋轉的AMB穩定性的影響。
② 建立的數學模型基于轉子質量均勻的理想狀況,如果轉子質量分布不均勻,幾何中心和質心不重合,該方法需要進一步改進。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
