強等離子鞘套下航天返回艙相控陣雷達探測問題研究
2023-10-10 01:57:48趙明旭張景東汪潤生白博文
測控技術 2023年9期
趙明旭, 張景東*, 汪潤生, 葛 頁, 王 坤, 白博文
(1.酒泉衛星發射中心,甘肅 酒泉 732750; 2.西安電子科技大學,陜西 西安 710000)
航天返回艙在再入大氣層過程中,由于其本身的飛行速度快(可達25Ma)、空間內環境和粒子分布復雜,導致返回艙周圍的溫度迅速升高(可達上千攝氏度),使返回艙外部部分材料發生化學反應以及電離,出現一層能夠干擾飛行器通信的物質,即等離子鞘套。當電磁波入射至等離子鞘套表面時,鞘套會對電磁波產生明顯的吸收折射效應使得電磁波受到嚴重干擾,這會影響返回艙與地面的通信甚至導致通信中斷,形成所謂的“黑障”,嚴重時甚至有可能發生飛行事故。黑障現象在航天返回艙再入段普遍存在,其中美國早期阿波羅飛船再入過程的黑障時間為7~11 min[1-3]。
黑障導致航天返回艙在再入過程中與地面通信中斷,地面統一S波段(Unified S Band,USB)、遙測等合作式測控設備在此時段不能探測目標,無法實時獲取目標位置。相控陣雷達具備探測通道多、搜索空域廣等特點,可以很好地應對返回艙再入段可能出現的航跡偏離和解體等異常情況,是黑障下返回艙實時探測的最佳解決方案。當前我國相控陣雷達多為線性調頻(Linear Frequency Modulation,LFM)體制單脈沖雷達,在航天返回艙再入段探測試驗中,多次出現因等離子鞘套包覆目標導致雷達無法檢測目標、探測不連續的情況,因此需要深入分析等離子鞘套對雷達探測產生的影響,制定針對性的探測策略。
20世紀60年代美國開展了無線電衰減(Radio Attenuation Measurement,RAM)工程,對電磁波在再入等離子鞘套過程中的傳播機理和衰減測量進行了研究[4],之后歷經半個多世紀,國內外學者對等離子鞘套對電磁波傳播、反射和透射產生的影響進行了深入研究。近年來隨著我國航天事業的發展,利用測量雷達和氣象雷達進行了大量航天返回艙再入段探測試驗,為等離子鞘套包覆下目標的電磁散射特性研究提供了支持,并形成了研究成果[5-7],但這些成果尚未在國內大型雷達針對黑障場景的探測任務中進行成功轉化應用。本文分析了等離子鞘套包覆下目標電磁散射特性對LFM體制單脈沖相控陣雷達探測的影響,提出了相控陣雷達對航天返回艙再入段連續穩定探測的策略。
1 返回艙等離子鞘套對雷達探測的影響
1.1 返回艙等離子鞘套特性
航天返回艙在再入返回過程中的速度一般大于20Ma,返回艙周圍的溫度可達6 000~8 000 K,形成的等離子鞘套電子密度峰值可達(1010~1014)/cm3,尾流區的長度為飛行器底部尺寸的10~20倍[8]。相對于類高超聲速飛行器(Hypersonic Technology Vehicle,HTV)模型,航天返回艙類似于大鈍頭結構,再入時產生的等離子鞘套特性與錐形類目標產生的等離子鞘套特性存在很大差異。對美國Apollo返回艙在再入高度30 km,速度12Ma條件下的等離子鞘套分布進行仿真,并與美國先進高超聲速武器(Advanced Hypersonic Weapon,AHW)同等條件下的仿真結果進行比對,如圖1所示(左為Appllo,右為AHW)。
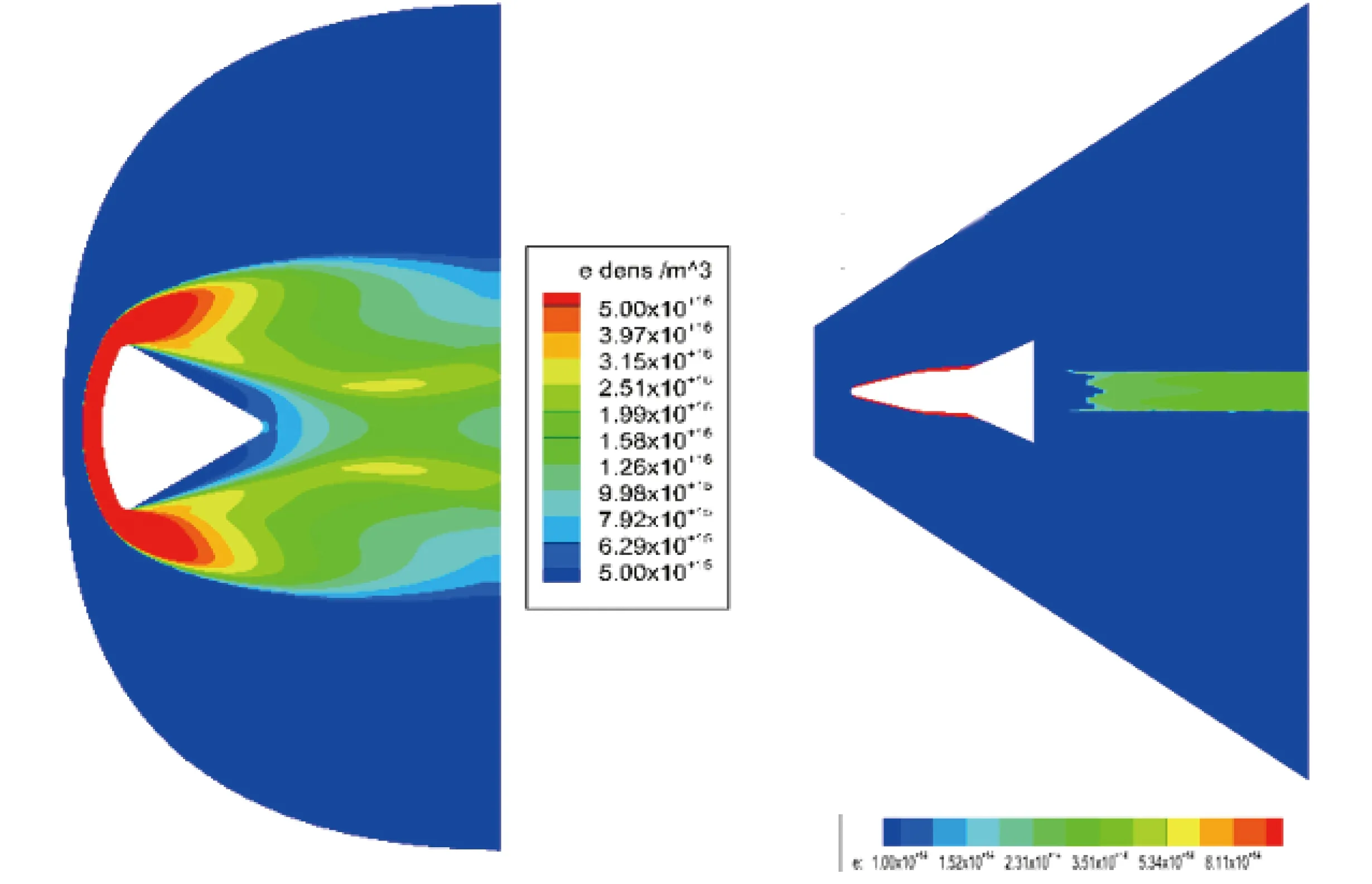
圖1 Apollo和AHW在30 km、12Ma下的自由電子密度分布
在相同的高度-速度條件下,大鈍頭類飛行器產生的等離子鞘套要遠強于錐形類飛行器,提取激波區、中部區和尾流區的電子密度,可以獲得如圖2所示的電子密度與流場x方向速度(運動方向)的關系圖,紅色為激波區,藍色為中間區,綠色為尾流區。
由圖2可知,在同等高度和速度條件下,大鈍頭類飛行器的最大自由電子密度比錐形類飛行器小,但其自由電子密度分布區遠大于錐形目標;錐形類飛行器的高自由電子密度區很薄且和目標速度一致,大鈍頭類飛行器的高自由電子密度區速度分布較廣,且最大自由電子密度的位置并不在目標速度的位置,大約是最大速度的90%;大鈍頭類飛行器尾流區的電子密度遠高于錐形類飛行器。
1.2 等離子鞘套對雷達探測的影響機理
1.2.1 雷達散射截面積
航天返回艙一般在高度為80 km時開始產生等離子鞘套,其雷達散射截面積(Radar Cross Section,RCS)隨著高度降低和減速過程呈現增加和衰減段,這兩個階段均產生鞘套拖尾使目標散射質心產生偏移,有研究表明鈍錐體再入飛行器雷達回波主要來自于尾跡湍流散射[9],仿真及實驗室測試數據表明,由于鞘套效應,目標RCS起伏超過30 dB。
等離子鞘套中的等離子體的電子密度和碰撞概率會隨著溫度和壓強的變化而改變,從而改變等離子體對入射電磁波的吸收和反射作用。當等離子鞘套特性隨著返回艙高度、速度變化發生改變時,探測的返回艙RCS會出現3種情況:① 雷達電磁波可以入射鞘套,部分回波被鞘套吸收,目標RCS呈現下降趨勢,當吸收作用較強時,會導致雷達丟失目標;② 雷達電磁波仍可以入射鞘套,鞘套對電磁波產生較強反射,雷達回波信號由鞘套與返回艙反射信號共同構成,雷達RCS呈增大趨勢;③ 雷達電磁波不能入射鞘套,完全被鞘套吸收和反射,此時雷達探測的目標RCS實際為鞘套的RCS,呈現劇烈的起伏特性。
探測雷達常用波段有L、S、C、X波段,等離子鞘套對不同波段的電磁波的吸收和反射作用是不同的,雷達的布站為返回艙航跡的迎向、后向和側向時,等離子鞘套激波區、中間區和尾流區對雷達的探測影響也是不同的。根據數據分析,返回艙的等離子鞘套不能全程對某一波段的入射電磁波完全吸收,雷達丟失目標的主要原因是RCS減小導致威力不足和自身恒虛警檢測模式不適應。
1.2.2 群多普勒效應
等離子鞘套是復雜的介質,對電磁波信號的幅度和相位產生嚴重的調制現象。等離子鞘套會對信號形成電磁調制,影響雷達探測的精度[10]。當雷達對等離子鞘套下返回艙進行探測時,等離子鞘套使流體目標在不同的位置處具有不同的多普勒信息,導致等離子鞘套下返回艙的回波信號幅度和相位均出現相應的調制的同時,其多普勒頻率分量也增多,即群多普勒效應,如圖3所示。
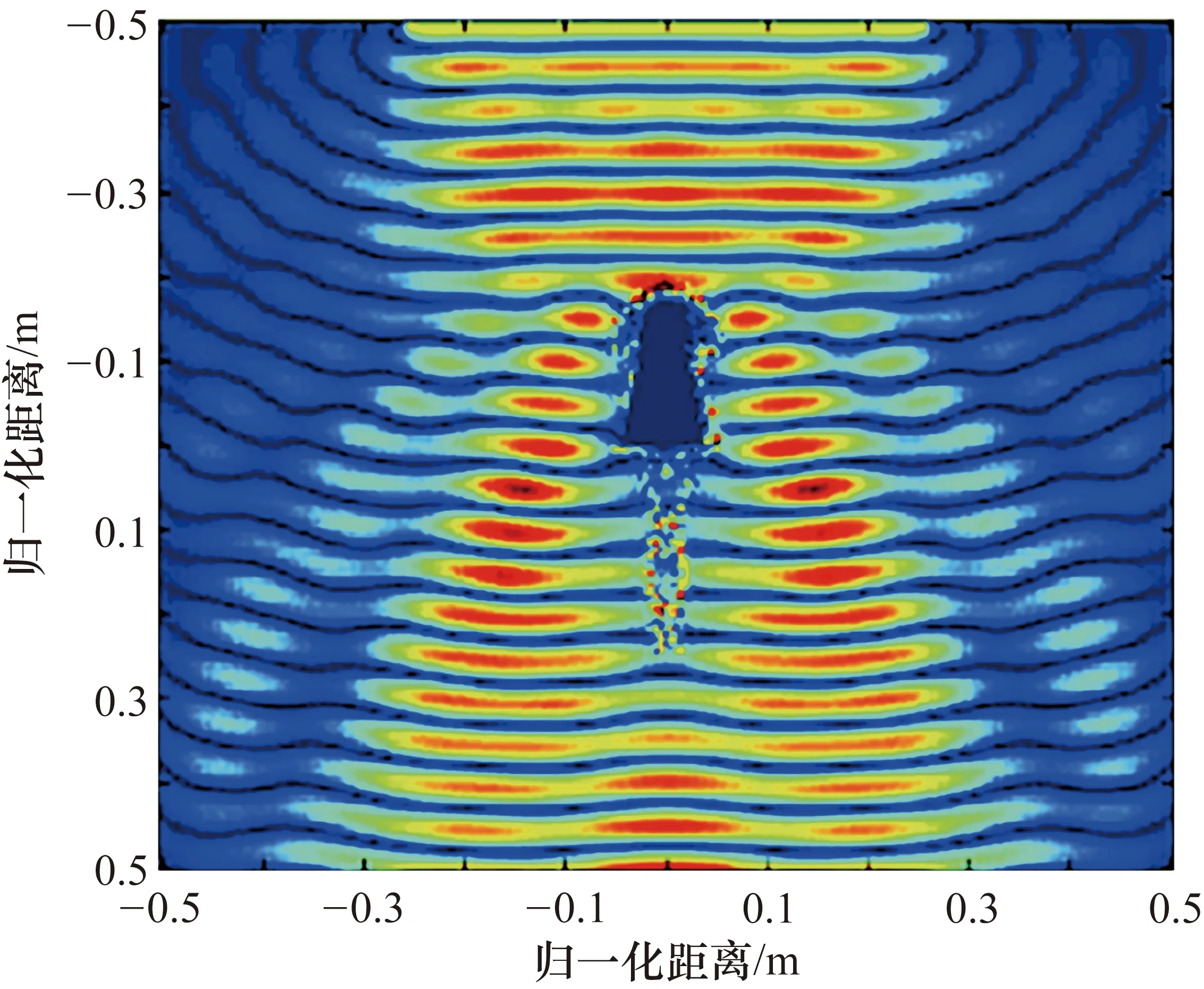
圖3 等離子鞘套下目標電磁波傳播示意圖
LFM體制雷達回波中耦合過多的多普勒頻率會嚴重干擾回波信號的匹配濾波結果,形成多散射中心,使雷達所接收到的回波中既包含再入物體即真實目標的多普勒信息,也包含受等離子鞘套影響所產生虛假目標的多個多普勒信息,在雷達一維距離像上會形成多個假目標,即“多干擾目標”現象。
雖然LFM體制雷達的信號多普勒容限大,回波濾波后仍可以達到匹配脈沖壓縮的效果[11],但是由于等離子鞘套上的強散射點與返回艙存在不同的多普勒頻移,雷達回波脈壓信號的包絡中會出現多個脈壓尖峰,表征真實目標與等離子鞘套的相對多普勒頻移差帶來的距離偏差,同時由于鞘套多普勒頻移的不穩定性,回波脈壓后的峰值位置會發生變化,峰值最大的位置可能不是目標的真實位置,還會出現多個峰值距離緊鄰或大小一致的情況。這對于雷達的跟蹤和目標識別都是極為不利的,若錯誤地選擇等離子鞘套強散射點為主跟蹤目標,等離子鞘套特性的改變會引起強散射點的變化,雷達獲取的探測數據會出現抖動,影響對返回艙的穩定跟蹤,甚至出現丟失的情況。
1.2.3 恒虛警檢測
雷達對目標的檢測過程可以用門限來描述[12-15],實際雷達中通常采用控制一定虛警概率又能保證較高檢測概率的方法,即恒虛警率(Constant False Alarm Rate,CFAR)檢測。CFAR處理分為快門限和慢門限算法,由于快門限CFAR可以很好地適應雜波環境下的雷達自動檢測,在LFM體制脈沖雷達中應用廣泛。當前使用最多的快門限算法是單元平均(Cell Averaging,CA)-CFAR、最大(Greatest Of,GO)-CFAR、最小(Smallest Of,SO)-CFAR、有序統計量(Order Statistics,OS)-CFAR和變化指數(Variability Index,VI)-CFAR算法,以及在這4種算法基礎上改進的算法。
在LFM體制脈沖雷達對等離子鞘套下返回艙的探測過程中,雷達回波信號會表現為距離拓展,強等離子鞘套情況下回波信號拓展可達數公里,表現為一個包絡,如圖4所示。在距離拓展的情況下,采用快門限算法會因參考單元和保護單元數量的限制無法覆蓋整個包絡,使用GO-CFAR計算時背景噪聲門限抬高,無法輸出過門限的點,采用SO-CFAR則存在背景噪聲門限過低,檢測到過門限的點過多,目標距離解算錯誤。OS-CFAR和VI-CFAR在均勻高斯環境下的性能較好,但是強等離子鞘套下的距離拓展包絡表現為非高斯分布,亦無法正確檢測到目標。因此,強等離子鞘套會導致脈沖雷達CFAR失效,無法檢測到目標或無法正確計算目標位置。
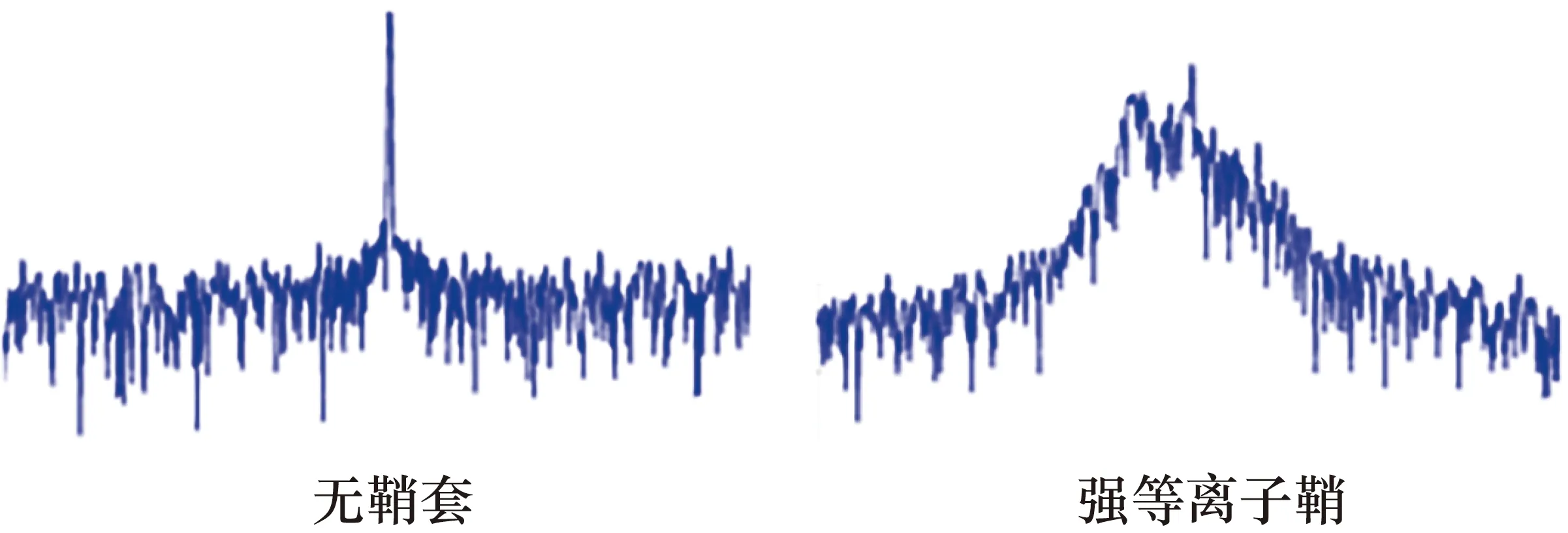
圖4 等離子鞘套下目標脈沖雷達回波距離拓展
2 相控陣雷達探測策略
2.1 增加信號帶寬
雷達采用的線性調頻基帶信號為
(1)
常規線性調頻信號脈沖壓縮處理時存在距離-多普勒耦合特性,導致其在跟蹤等離子鞘套目標時性能變差。距離-多普勒耦合是指如果目標具有一定徑向速度,則雷達回波經過脈沖壓縮處理后,得到的目標位置與目標真實位置會有一定距離偏差,偏差的大小與其速度大小成正比。等離子鞘套中處于同一位置的不同速度的散射點經過脈沖壓縮處理后,在距離維上被拉開,回波脈壓結果表現為一個很寬的包絡,其拓展范圍可以用式(2)表示。
(2)
式中:fd目鞘為目標與最低速等離子鞘套的多普勒差;c為光速;K為線性調頻信號的調頻斜率。由式(2)可知,在雷達脈寬和波長相同的情況下,等離子鞘套多普勒耦合距離單元散布范圍與線性調頻信號的調頻斜率成反比,帶寬大的線性調頻信號散布的包絡較小。因此增加信號帶寬可以對雷達LFM信號脈壓產生的包絡進行壓縮,一般將雷達窄帶跟蹤帶寬成倍提高,可以有效改善雷達對等離子鞘套下返回艙的跟蹤效果。
2.2 慢門限CFAR檢測
在提升雷達LFM信號窄帶跟蹤帶寬的前提下,當等離子鞘套引起的距離-多普勒耦合回波脈壓拓展超過一定距離范圍后,使用快門限CFAR檢測會出現無法檢測到超過檢測門限的點的情況,導致雷達跟蹤丟失。快門限CFAR檢測是根據回波采樣數據率滑窗式計算檢測基準,分別加上雷達搜索門限值和跟蹤門限值,作為搜索和跟蹤檢測門限。當快門限CFAR無法檢測到目標時,需要調整為慢門限CFAR檢測。
慢門限CFAR檢測是以熱噪聲統計均值幅度為基準,分別加上雷達搜索檢測門限值和跟蹤檢測門限值,作為搜索和跟蹤檢測門限。慢門限CFAR檢測的優點在于熱噪聲均值相對固定的情況下,檢測門限值是固定的,等離子鞘套下返回艙雷達回波脈壓包絡都可以在檢測門限值之上,不會出現無法檢測到目標的情況。慢門限CFAR檢測也存在過門限點過多的缺點,可以通過凝聚送點的方式進行優化。凝聚送點指將超過門限的連續檢測點視為一個整體(信號島),從島中凝聚送點輸出。
2.3 寬窄帶交替跟蹤
脈沖雷達在窄帶情況下目標的回波信號是目標上不同散射中心回波信號疊加的矢量和,對測量精度帶來很大影響,而寬帶情況下,目標各散射中心分布在不同的距離單元,對目標的測量更加精確[16]。寬帶信號具有多普勒-距離耦合小的特性,可以有效降低等離子鞘套下返回艙雷達回波脈壓包絡覆蓋的距離單元。
部分LFM體制脈沖相控陣雷達具備寬帶跟蹤功能,在探測中可以完成對目標的成像測量。針對航天返回艙等離子鞘套會有多個強散射點甚至形成雷達回波脈壓包絡的情況,采用寬帶信號進行返回艙位置測量,可以壓縮回波脈壓包絡,減小點與航跡關聯錯誤導致跟蹤不穩定的概率。由于寬帶測角存在角度閃爍問題,難以滿足返回艙測量需求,因此,可以采取“寬窄帶交替跟蹤”方式,即寬帶測距、窄帶測角,具體流程如圖5所示。
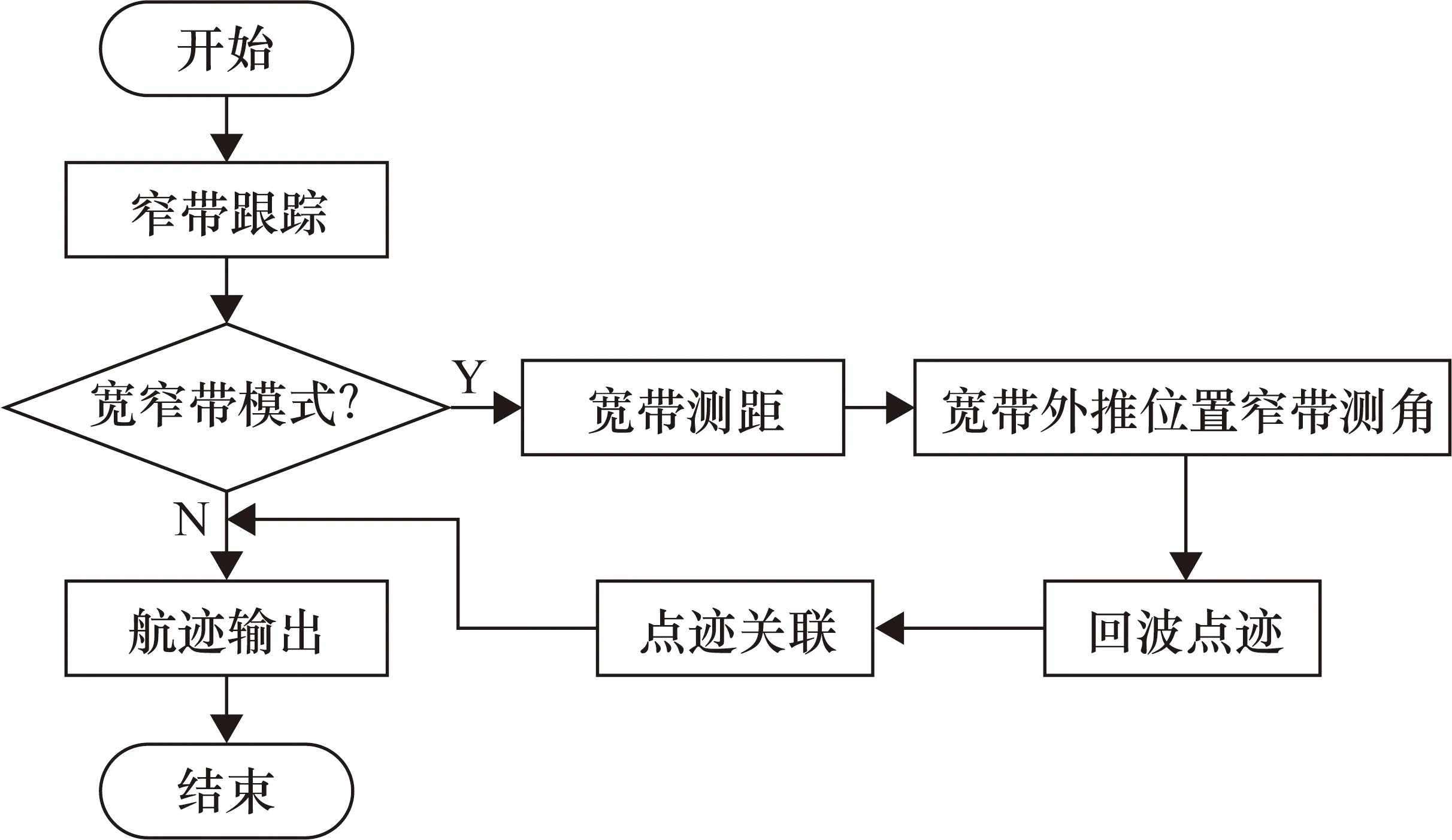
圖5 雷達寬窄帶交替跟蹤流程圖
寬窄帶交替跟蹤模式下,雷達先采用窄帶跟蹤目標,再切換為寬窄帶交替跟蹤模式,寬帶和窄帶測量交替進行,一幀窄帶一幀寬帶,當寬帶檢測到目標信號并提取出目標距離信息后,根據目標速度外推出下一幀窄帶對應時刻的目標位置信息,窄帶波束以寬帶外推的位置為波門中心獲得測角信息,結合寬帶測得的距離信息形成點跡,最后進行航跡關聯形成穩定的航跡信息。
寬窄帶交替跟蹤模式的限制在于需要雷達先用窄帶完成對目標的跟蹤,寬窄帶交替跟蹤檢測到的目標數要多于窄帶跟蹤,需要在大量的距離鄰近的目標中識別返回艙目標。當雷達寬帶帶寬較小時,離子鞘套下返回艙雷達回波脈壓包絡的壓縮效果也受到限制。
2.4 復雜波形設計
2.4.1 正負斜率線性調頻信號
線性調頻信號的距離多普勒耦合方向與信號的正負斜率以及目標運動方向相關,正斜率信號耦合距離相比負斜率正好相反。利用這一特性,可以根據等離子鞘套快時變相關性差、返回艙性態穩定相關性強的特點,通過互相關處理,解算出返回艙的實際位置,而等離子鞘套反射回波因相關性差,有效點跡提取困難。
雷達波形設計可以采用正負斜率線性調頻信號跟蹤,雷達將原來1個脈沖重復間隔(Plus Repetition Interval,PRI)內發射的脈寬為τ、調制斜率為k的1個脈沖信號進行拆分,變為發射2個調制斜率分別為k1和-k1的脈沖信號,即正負斜率雙脈沖,同時接收后作慢門限處理,如圖6所示。
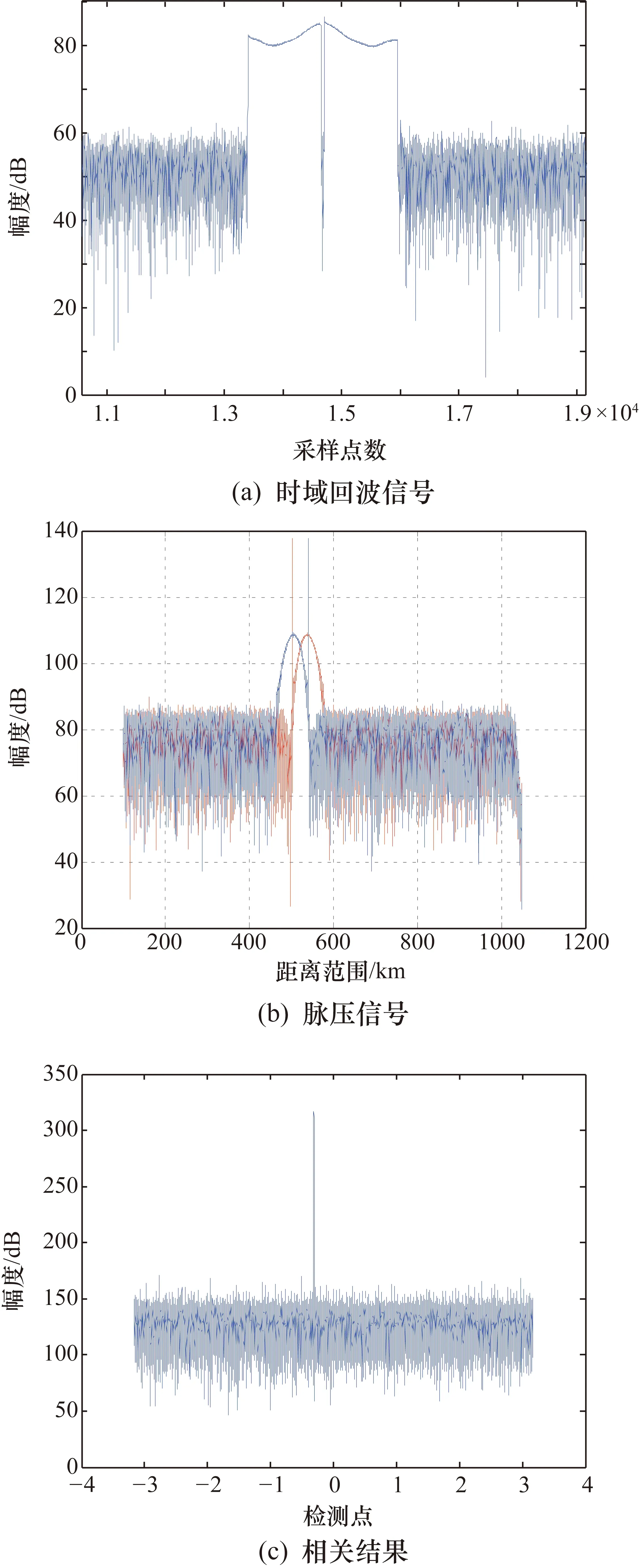
圖6 正負線性調頻信號仿真結果
2.4.2 相位編碼
在雷達信號設計中,雷達信號模糊函數占有非常重要的地位。當輸入為多普勒頻移響應x(t)exp(j2πFDt)時波形x(t)的匹配濾波器輸出為

(3)
雷達模糊函數表示匹配濾波器的輸出,標稱目標的反射回波位于模糊函數的原點,在非原點的值代表了不同于標稱目標的某個距離和多普勒目標的回波。理想的模糊函數應該是完美的“圖釘形”,其僅在原點處有1尖峰,其他處全部為0。
相位編碼信號通過信號的時域非線性調相達到擴展等效頻寬的目的,從而提高距離分辨力。在相位編碼中,一個長的點頻信號被分為等寬的子脈沖,每一段子脈沖被額外增加一個相位調制。相位編碼的模糊函數為近圖釘形。相比于線性調頻信號,其不存在距離-多普勒耦合,相位編碼的多普勒容限低,對一個點目標進行脈壓時,使用的多普勒速度濾波器與目標真實多普勒不一致則脈壓就無法得到目標。采用相位編碼信號,可以在高信噪比的條件下,基于速度信息清晰區分出返回艙本體、等離子鞘套和尾流。
2.5 復制跟蹤
由于返回艙再入過程中等離子鞘套在三維空間分 布是一個非平穩時變的隨機過程,涉及高度、速度、姿 態、湍流、壓力脈動、大氣和燒蝕在內的多種因素,在測 控、通信和探測等領域中常常能觀測到隨機現象。等離子鞘套對不同波段雷達電磁波影響是不一致的,雷達布站因素導致電磁波入射的等離子鞘套區域也會隨著返回艙的飛行過程改變。因此,雷達采用單一跟蹤方式不能完美地應對返回艙再入過程中因等離子鞘套變化導致的探測精度變差、目標丟失等問題。
基于此特點設計了針對等離子鞘套下返回艙的復制跟蹤策略,即多個跟蹤通道采用不同方式同時跟蹤返回艙。LFM體制脈沖相控陣雷達的復制跟蹤流程如圖7所示。
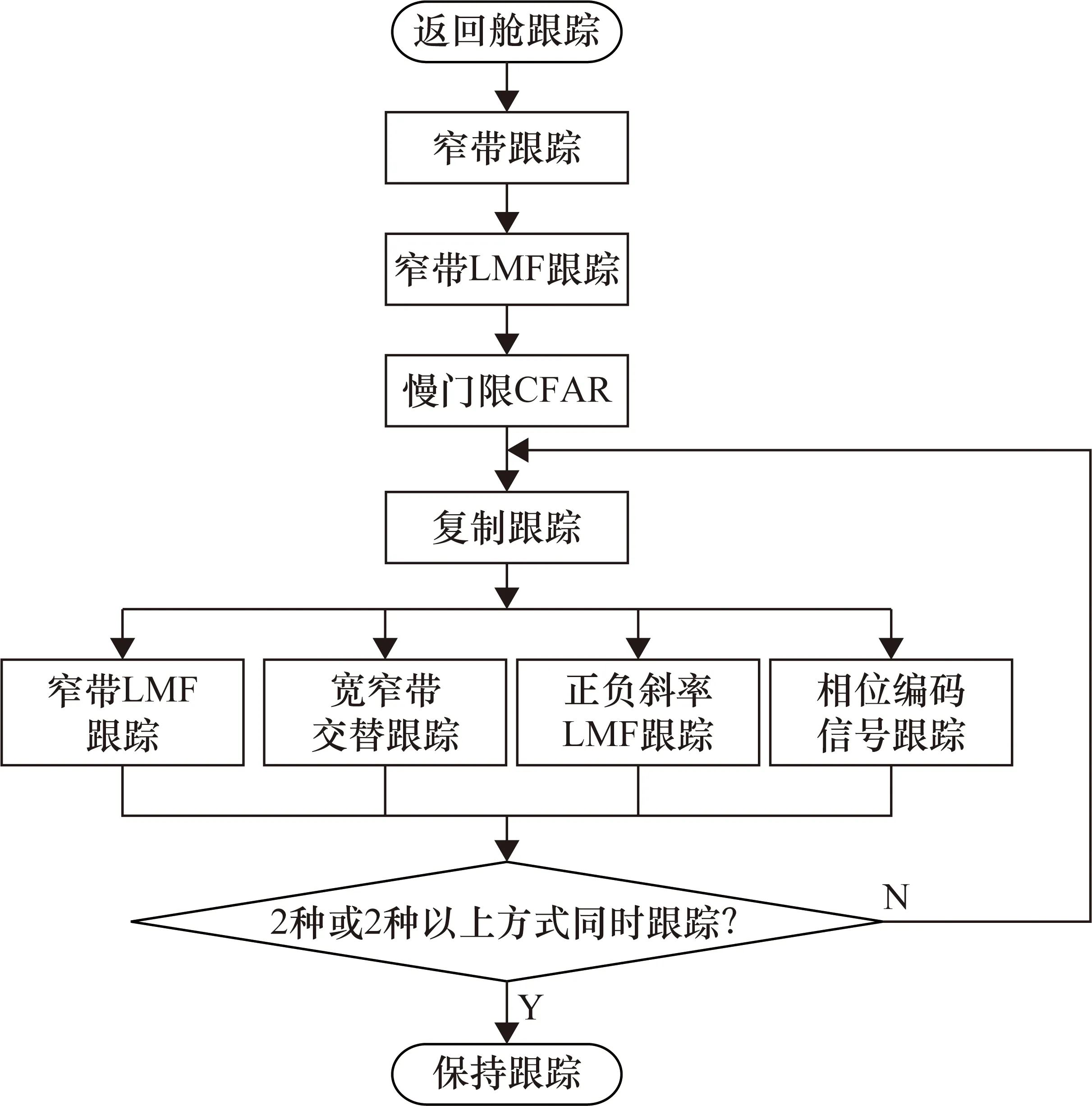
圖7 LFM體制脈沖相控陣雷達的復制跟蹤流程圖
雷達復制跟蹤策略的具體思路是:① 雷達采用窄帶LFM信號(快門限CFAR)在返回艙出現等離子鞘套前或等離子鞘套很弱的情況下(高度>100 km)跟蹤返回艙目標;② 等離子鞘套變強后可更改快門限CFAR為慢門限CFAR;③ 對窄帶LFM跟蹤通道進行復制跟蹤,復制通道分別采用寬窄帶交替、正負斜率LFM、相位編碼信號跟蹤,形成多個通道對返回艙的同時跟蹤;④ 當有2種或2種以上方式正常保持跟蹤時,跟蹤數據融合輸出;⑤ 如某種方式出現丟失時,可再次進行相應復制跟蹤,當出現4種方式均丟失目標跟蹤的極端情況時,采用LFM和相位編碼信號搜索目標。
3 跟蹤效果分析
在實際跟蹤測量任務中,起始段采用常規LFM信號進行跟蹤,跟蹤穩定后,對主目標進行臨空復制操作,復制3個目標分別采用±LFM波形跟蹤、PE波形跟蹤和寬窄帶跟蹤。任務中若某種波形跟蹤丟失,可利用其他波形跟蹤的目標進行復制跟蹤操作,繼續該波形跟蹤。圖8為幾種典型的信號波形跟蹤航天器再入返回段任務時實測數據與理論彈道高度差曲線。不同時段各個波形跟蹤效果各不相同,綜合應用各種波形相互替補可保持對航天器目標全程連續跟蹤。
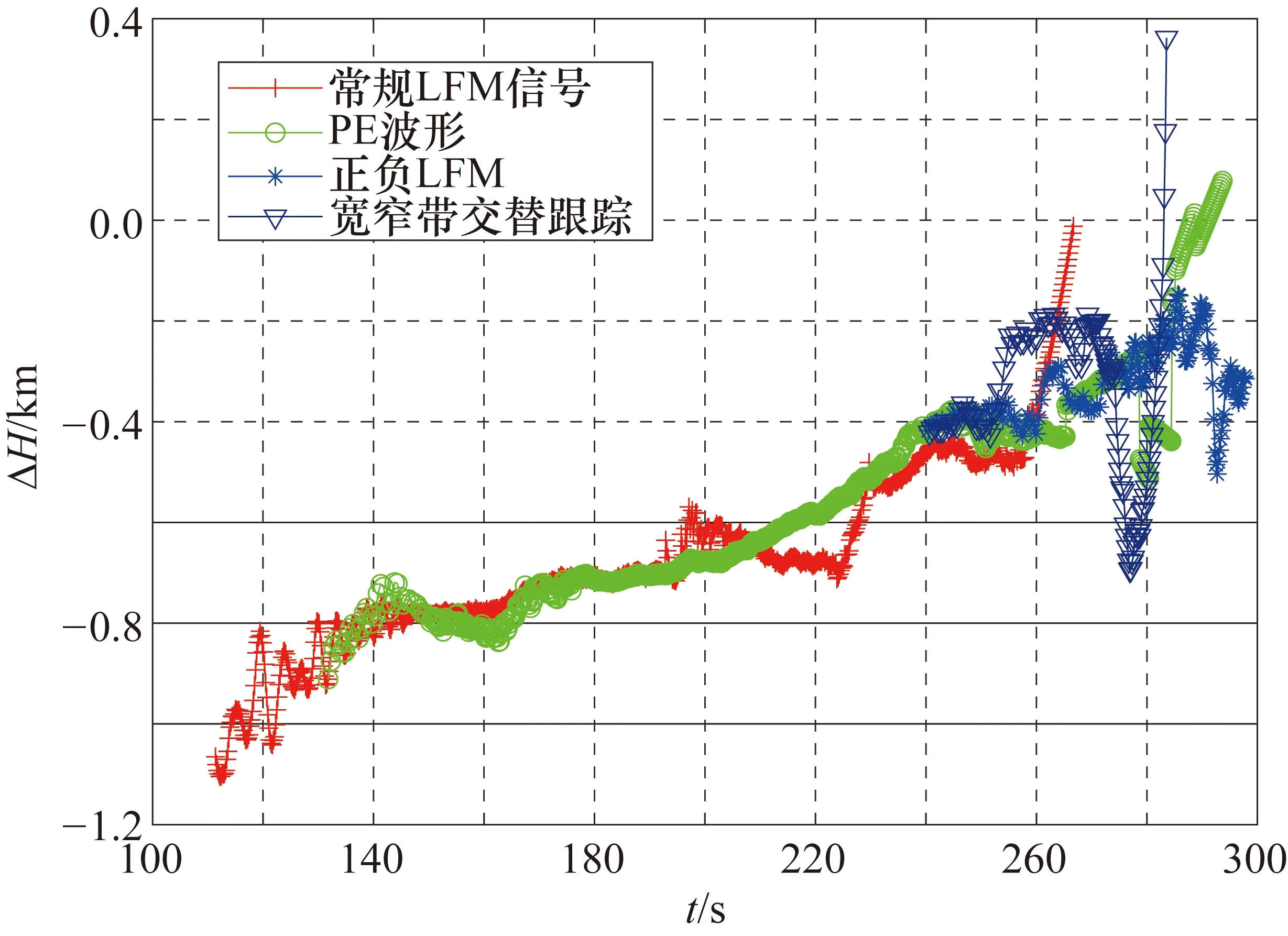
圖8 各種波形復制跟蹤效果
4 結束語
本文針對LFM體制脈沖相控陣雷達在航天返回艙再入段探測過程中存在的黑障探測問題,基于等離子鞘套特性分析了其對雷達探測的影響機理,提出了增加信號帶寬、使用慢門限CFAR檢測、寬窄帶交替跟蹤、正負斜率LFM跟蹤、相位編碼信號跟蹤和復制跟蹤策略,為雷達連續穩定探測提供了思路。探測策略 不僅適用于雷達對等離子鞘套下航天返回艙的探測, 也適用于探測臨近空間高超聲速飛行器,但是實際探測數據的檢驗還比較缺乏。雷達探測等離子鞘套包覆下目標技術難點多、專業跨度大,后續還需要各專業聯合技術攻關開展研究工作。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
