干涉型光纖海洋參數(shù)傳感器的分布式測量方法研究
2023-09-27 23:34:10鄭洪坤呂日清林子婷劉睿杰
自動化學(xué)報 2023年9期
鄭洪坤 呂日清 趙 勇, 彭 昀 林子婷 劉睿杰
隨著我國綜合實(shí)力的提高,海洋在經(jīng)濟(jì)發(fā)展、軍事安全、科學(xué)研究等領(lǐng)域的作用也越來越重要,因而得到了廣泛的關(guān)注[1-2].傳感器作為獲取信息的一種重要手段,在海洋監(jiān)測方面也發(fā)揮著越來越大的作用.光纖傳感器作為一種新型的無源傳感器件,具有靈敏度高、體積小、抗電磁干擾等優(yōu)點(diǎn)[3-4],已經(jīng)在很多領(lǐng)域發(fā)揮作用.近年來,面向海洋監(jiān)測應(yīng)用的光纖傳感器也得到了快速發(fā)展,大量的海洋參數(shù)傳感方案被提出,目前主要涉及到海洋的溫度、鹽度和深度三個參數(shù)的測量[5].由于分布式光纖僅對溫度和應(yīng)變敏感,目前光纖傳感器的溫度鹽度深度測量以點(diǎn)式傳感器為主.
光纖光柵(Fiber bragg grating,FBG)通常結(jié)合敏感材料實(shí)現(xiàn)對海洋溫鹽深參數(shù)的測量,通過敏感材料實(shí)現(xiàn)靈敏度的放大.中科院半導(dǎo)體所的Wang等[6]通過將FBG 固定在毛細(xì)不銹鋼管中實(shí)現(xiàn)了對FBG 的溫度增敏,溫度分辨力可以達(dá)到0.01 ℃;通過將FBG 和彈性膜片增敏結(jié)構(gòu)相結(jié)合可以實(shí)現(xiàn)1.57 nm/MPa 的壓力測量靈敏度[7];將FBG 和水凝膠相結(jié)合[8],利用水凝膠的水分累積和擴(kuò)散特性將鹽度變化轉(zhuǎn)換為FBG 柵區(qū)的應(yīng)變變化,實(shí)現(xiàn)了靈敏度為9.5 nm/‰ 的鹽度測量.由于FBG 的光譜形狀為一個窄帶寬的峰值,光譜的大范圍高分辨率解調(diào)實(shí)現(xiàn)較為方便,而且可以通過波分復(fù)用技術(shù)實(shí)現(xiàn)多個傳感器的級聯(lián).但是基于該原理的傳感器靈敏度普遍偏低.
基于該種情況,研究者們提出了多種基于干涉原理的高靈敏海水溫度鹽度測量方案.2010 年,Liao等[9]通過飛秒激光刻蝕技術(shù)在光纖上形成Mach-Zehnder 干涉儀,直接將待測介質(zhì)作為傳感臂,傳感器的折射率靈敏度可以達(dá)到9148 nm/RIU,可以實(shí)現(xiàn)nm/‰量級的鹽度靈敏度.本課題組提出了一種同一結(jié)構(gòu)中兩種干涉效應(yīng)共存的傳感方案[10],在一個結(jié)構(gòu)中就可以對溫度和鹽度雙參數(shù)進(jìn)行解耦.之后,為了方便傳感器的布設(shè),降低外界拉伸對傳感器的影響,將透射式傳感結(jié)構(gòu)更改為反射式[11].這些基于干涉原理的傳感器雖然具有很高的測量靈敏度,但是傳感器的復(fù)用比較困難.基于干涉原理的光纖傳感器的光譜在波長域內(nèi)是準(zhǔn)正弦分布的,傳感器的靈敏度和測量范圍存在矛盾,雖然已經(jīng)通過干涉光譜解調(diào)算法解決了基于干涉原理的光纖傳感器靈敏度和測量范圍之間的矛盾[12-14],但是同一系統(tǒng)中通過頻分復(fù)用技術(shù)復(fù)用的傳感器數(shù)量也是有限的.為了解決干涉式光纖傳感器的復(fù)用問題,本文提出了一種基于調(diào)頻連續(xù)波(Frequency modulated continuous wave,FMCW)技術(shù)的復(fù)用方案,將反射端面返回的光與參考臂的光形成Mach-Zehnder 干涉儀,用于確定傳感器的位置;通過同一傳感器不同反射端面間的拍頻恢復(fù)傳感器的光譜.搭建了用于傳感器分布測試的系統(tǒng),編寫了數(shù)據(jù)處理軟件用于光譜的采集與處理,通過在系統(tǒng)中接入用于溫度鹽度測試的級聯(lián)法布里-珀羅干涉儀(Fabry-Perot interferometer,FPI)探頭和用于應(yīng)變測試的FPI 探頭,分別對應(yīng)海洋環(huán)境測試中的溫度、鹽度、深度這三個基本參數(shù),并測試了實(shí)驗系統(tǒng)中傳感器的響應(yīng)特性.
1 理論介紹
圖1 給出了FMCW 的技術(shù)原理圖,FMCW 技術(shù)利用可調(diào)諧激光器(Tunable laser source,TLS)發(fā)出頻率隨時間變化的光,反射光因在光纖中傳輸表現(xiàn)出相對于參考光的延時特性,通過探測器(Photoelectric detector,PD)探測到參考光和傳感光形成的干涉光,通過干涉光的頻率反推得到反射端面的位置信息[15-16].假設(shè)入射光是調(diào)頻速度為γHz/s的線性掃頻光,入射光經(jīng)過耦合器分到參考臂和傳感臂上,參考臂的電場表達(dá)式可以寫為:
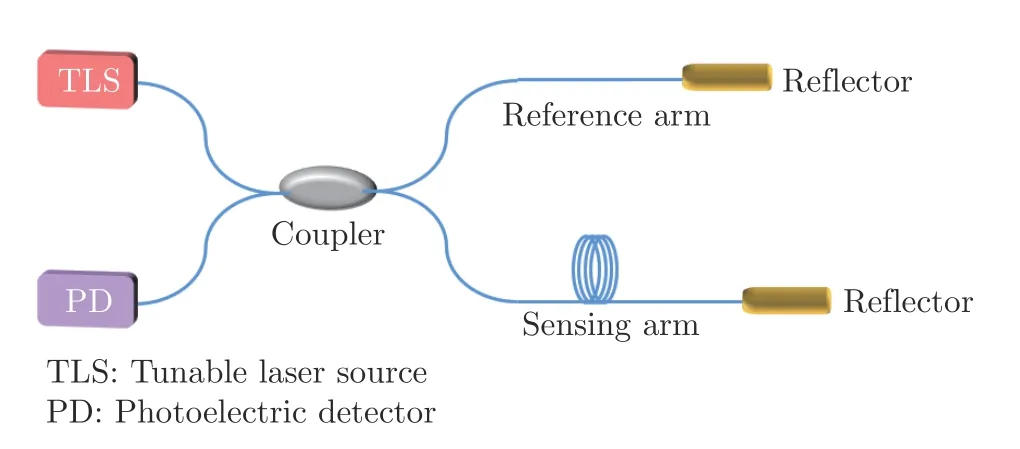
圖1 FMCW 原理示意圖Fig.1 Schematic graph of FMCW
其中f0表示掃頻光的起始頻率,E0為入射電場的幅值,a表示耦合器到參考臂的分光比.
當(dāng)入射光從反射面返回時,可以表示為一個與入射光存在時間延時的掃頻信號:
其中τ表示由于參考臂與傳感臂臂長差造成的時延差,具體可以計算為τ=2n?l/c.r表示傳感器端面的反射率.兩束光相干之后通過探測器對相干光進(jìn)行探測,探測得到的光強(qiáng)可以表示為:
可以看出,拍頻信號與參考光和傳感臂間的時延存在線性對應(yīng)關(guān)系,進(jìn)而可以通過該方法確定傳感臂與參考臂的長度差.圖2 給出了參考臂和傳感臂光頻率的變化情況,兩束具有時延的光形成了一個具有固定頻率差的干涉信號,這與式(3)是相同的.當(dāng)系統(tǒng)中的傳感臂中存在多個反射面時,會形成多個與參考臂具有不同光程差的干涉信號,根據(jù)光程差可以確定反射面所處的位置,通過不同反射端面與參考臂形成的干涉光譜間的拍頻,可以反推得到干涉光譜的信息,進(jìn)而可以實(shí)現(xiàn)單個傳感器干涉光譜的還原.

圖2 參考臂和傳感臂頻率隨時間的變化Fig.2 Frequency changing of reference beam and sensing arm with time
2 仿真分析
本文編寫了MATLAB 代碼對基于FMCW 技術(shù)的傳感器復(fù)用系統(tǒng)進(jìn)行了仿真,仿真中采用的系統(tǒng)如圖3 所示,仿真中設(shè)置可調(diào)諧激光器的波長掃描范圍為1530 nm~1570 nm,掃頻速度大致為10 THz/s,將99%注入到傳感系統(tǒng)的傳感臂中用于得到較強(qiáng)的反射光.環(huán)形器將光注入到復(fù)用在傳感臂上的傳感器中并收集傳感器的反射光.用于傳感器分光的耦合器分光比為95: 5,并在系統(tǒng)的4 m、5 m 和6 m 位置處設(shè)置三個FPI 傳感器,通過平衡探測器(Balanced photoelectric detector,BPD)對相干光進(jìn)行探測.
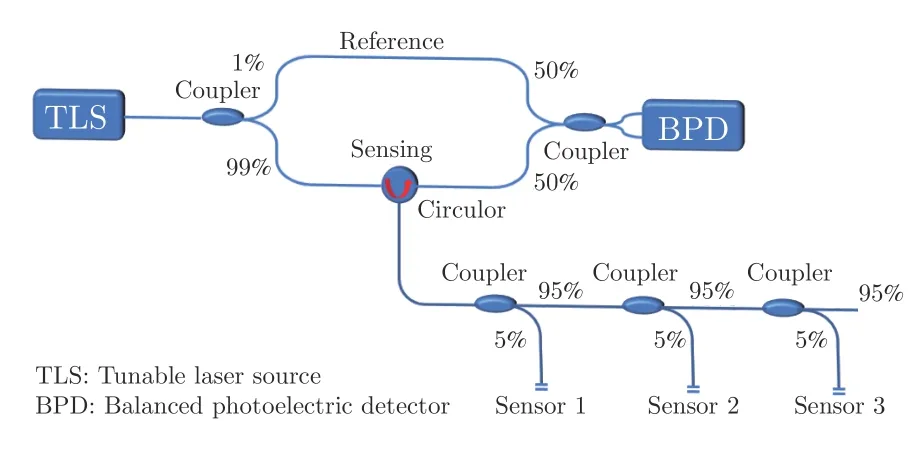
圖3 分布式傳感仿真系統(tǒng)圖Fig.3 Simulation configuration of the distributed sensing system
圖4 給出了系統(tǒng)的仿真光譜,仿真光譜包含了不同位置處反射面的光譜疊加情況,從時域光譜上很難區(qū)分不同反射面,采用快速傅里葉變換(Fast Fourier transform,FFT)對疊加光譜進(jìn)行了頻譜分析,可以得到不同反射端面的位置信息.圖5(a)給出了傅里葉分析的結(jié)果,可以看出,在頻譜的4 m、5 m、6 m 位置處出現(xiàn)了3 個特征頻率,頻譜中的1 m和2 m 處的特征頻率則是由于3 個FPI 傳感器之間拍頻形成的.由于傳感臂的反射光很弱,因而傳感器間拍頻信號的強(qiáng)度也會很弱,可以通過提高參考臂信號強(qiáng)度的方法進(jìn)一步提高參考光與傳感光拍頻信號強(qiáng)度,降低傳感器之間光譜拍頻對光譜恢復(fù)的影響.由于每個FPI 都是由相鄰很近的兩個反射面構(gòu)成的,為了實(shí)現(xiàn)對干涉光譜的恢復(fù),對4 m 處的頻譜進(jìn)行了放大,由圖5(b)給出,發(fā)現(xiàn)兩個端面在頻域是可以區(qū)分的,因而可以實(shí)現(xiàn)對傳感器光譜的還原.

圖4 仿真得到的系統(tǒng)光譜Fig.4 Simulated spectrum of the system

圖5 仿真光譜的頻譜特性圖((a)仿真光譜頻譜特性圖;(b)仿真光譜頻譜特性分析放大圖)Fig.5 Frequency spectrum of the simulated spectrum((a)Frequency spectrum of the simulated spectrum;(b)Partial enlarged drawing of the frequency spectrum)
之后對FPI 光譜的恢復(fù)方法進(jìn)行了研究,利用矩形窗將傳感器特征頻譜處的復(fù)頻譜信號截取出來,補(bǔ)零后對其進(jìn)行反傅里葉變換,得到還原光譜,如圖6 所示.信號通過帶通濾波器后會產(chǎn)生延時,延時的大小與濾波器設(shè)置的參數(shù)有關(guān),通過將濾波后數(shù)據(jù)延時點(diǎn)刪除可以消除濾波延時的影響.由于恢復(fù)的傳感器光譜為同一傳感器兩個反射面與參考臂形成的干涉光譜間的拍頻,兩個信號的延時特性一致,因而對恢復(fù)信號的影響可以忽略.此外,由于系統(tǒng)中同一傳感器的延時參數(shù)是統(tǒng)一的,即使帶通濾波對系統(tǒng)響應(yīng)光譜有微小影響也是可以忽略的.

圖6 還原光譜與真實(shí)光譜對比((a)周期不匹配的情況;(b)周期匹配的情況)Fig.6 Comparison between the retrieved and real spectrum ((a)Mismatch phenomenon;(b)Match phenomenon)
雖然真實(shí)光譜和還原光譜具有近似的譜形,但是還原光譜的谷值處較為尖銳,因為在反傅里葉變換(Inverse FFT,IFFT)后對信號進(jìn)行取模運(yùn)算,導(dǎo)致信號沒有負(fù)值部分,這會造成信號的失真.通過分析,發(fā)現(xiàn)信號在拍頻時導(dǎo)致了頻率的減半,具體原因可以由式(4)給出,可以看出兩個信號在進(jìn)行拍頻之后會形成一個高頻和低頻信號的乘積,拍頻后的低頻信號頻率為兩個信號頻率差的一半.因而可以通過倍頻的方法將信號頻率調(diào)整為一致,即對信號做一個平方,本方案中利用積化和差公式將拍頻信號倍頻,使得拍頻信號與真實(shí)信號頻率相同.
之后對系統(tǒng)中可以復(fù)用的傳感器數(shù)量進(jìn)行理論計算,第N個端面的反射強(qiáng)度為:
其中Pin表示輸入到參考臂中的光,rm表示光纖反射端面的反射率,Pout是反射面反射到探測器的能量.rc1,N表示第N個耦合器第1 個端口的輸出能量比,rc2,n表示第n個耦合器第2 個端口的輸出能量比,平方表示光在耦合器中傳播一個來回,αN表示第N個耦合器的插入損耗.假設(shè)本系統(tǒng)中采用99: 1 的耦合器將光分配給系統(tǒng)中的傳感器,傳感器法蘭間的連接沒有損耗,所有FPI 傳感器端面都置于鹽水(折射率近似為1.33)中,端面的反射率rm大概為0.0025,進(jìn)入傳感臂的光功率為10 mW,傳感器中第500 個傳感器的反射能量為2.2× 10-10mW,如果參考臂的輸入光功率為20 μW,那么兩束光相干后的光功率約為4.2 nW.這個光強(qiáng)度大于探測器的噪聲等效功率,可以通過光電探測器探測得到.
本方案中采用的方案為相干探測方案,最大的傳感長度需要綜合考慮系統(tǒng)中光源的線寬、數(shù)據(jù)采集卡的采樣率以及可調(diào)諧激光器的波長掃描速度;根據(jù)光源線寬和相干長度之間的關(guān)系: ?v=c/(2nL),本方案中采用的可調(diào)諧激光器的線寬為60 kHz,光源的相干長度為1.66 km.按照本方案中設(shè)置的采樣率(62.5 MHz)和波長掃描速度(80 nm/s),為了利用參考干涉儀光譜實(shí)現(xiàn)等頻率重采樣,參考干涉儀每個周期至少有5 個采樣點(diǎn),根據(jù)干涉光譜計算公式 ?λ=λ2/(2nL),系統(tǒng)的最大傳感距離為125 m.
3 實(shí)驗系統(tǒng)搭建
為了對系統(tǒng)的特性進(jìn)行測試,搭建了實(shí)驗測試系統(tǒng),為了實(shí)現(xiàn)高的距離分辨力,系統(tǒng)中采用的光頻率掃描范圍應(yīng)該設(shè)置的盡可能大,本文采用的可調(diào)諧激光器是等波長間隔掃描的,然而干涉光譜在波長域并不是標(biāo)準(zhǔn)的正弦分布,根據(jù)干涉儀的干涉光譜公式y(tǒng)=cos(2π2nl/λ),波長位于正弦函數(shù)的分母上,雖然波長相對于腔長較小,得到的干涉光譜隨波長是一個類正弦信號,但是這也會導(dǎo)致FFT分析結(jié)果不準(zhǔn)確,尤其是在波長范圍較大的情況下.為了消除激光器非線性掃頻的影響,本方案中采用了附加干涉儀作為重采樣的標(biāo)準(zhǔn),利用干涉光譜在頻域是標(biāo)準(zhǔn)三角函數(shù)的特點(diǎn),三角函數(shù)在零點(diǎn)之間的間隔是確定的,通過利用參考干涉儀的零點(diǎn)實(shí)現(xiàn)光譜的等頻率間隔重采樣.
搭建了實(shí)驗系統(tǒng)如圖7 所示的帶有附加干涉儀的傳感系統(tǒng).采用的光源為波長范圍為1480 nm~1640 nm,品牌為Santec,型號為TSL770 的可調(diào)諧激光器,調(diào)諧速度為0~200 nm/s.系統(tǒng)中使用品牌為Conquer,型號為KG-PR-200 M 的光探測器,探測帶寬為200 MHz,用于獲取參考部分的干涉信號,所選的PD 的波長探測范圍為850 nm~1650 nm.通過 Thorlabs 品牌的PDB570C 型號的BPD 將傳感部分的參考臂與傳感臂的干涉光進(jìn)行相干探測.本方案中采用的BPD 工作波長范圍可以覆蓋1200 nm~1700 nm,探測帶寬可以覆蓋0~400 MHz.
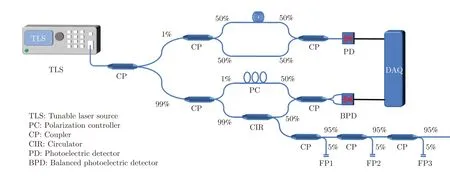
圖7 實(shí)驗搭建的FMCW 系統(tǒng)Fig.7 FMCW system configuration in experiment
選用Advantech 公司的PCIE-1840 采集卡(Data acquisition,DAQ)作為信號采集器件將探測器得到的信號讀入電腦中,該采集卡可以實(shí)現(xiàn)4通道16 位分辨率的信號采集,每個通道的采樣率可以達(dá)到125 MHz,在本實(shí)驗中將采集卡的采樣率設(shè)置為62.5 MHz,實(shí)驗中可調(diào)諧激光器的波長范圍為1530 nm~1570 nm,波長調(diào)諧速度為80 nm/s,數(shù)據(jù)每次采樣時間為0.5 s.需要用到采集卡的三個通道,一個通道用作采集卡的觸發(fā)信號,一個通道用于參考信號的采集,一個通道用于傳感信號的采集.在利用參考干涉儀的光譜進(jìn)行重采樣時,將參考信號作為參考時鐘,信號的等波數(shù)采樣可以通過硬件法或者軟件法實(shí)現(xiàn).硬件法是通過將PD 探測得到的參考信號作為外部時鐘信號輸入到采集卡中.軟件法則是將PD 探測到的參考采樣信號和BPD 探測到的傳感信號同時輸入到采集卡的信號通道中.由于每次掃描產(chǎn)生的參考信號不能連續(xù)穩(wěn)定存在,因而不能作為一個可靠的外部時鐘.此外,采集卡對外部時鐘的頻率是有限制的,參考時鐘的頻率應(yīng)該為10 MHz 左右才可以滿足外部時鐘采集需求.故采用了軟件法對光譜進(jìn)行重采樣.
為了實(shí)現(xiàn)對系統(tǒng)光譜的處理與單個傳感器的光譜恢復(fù),基于LabView 開發(fā)環(huán)境編寫了用于數(shù)據(jù)處理的軟件,用于系統(tǒng)光譜的實(shí)時顯示與處理.圖8給出了數(shù)據(jù)處理軟件的前面板,前面板包含多個用于設(shè)置采集系統(tǒng)的輸入控件,主要包括可調(diào)諧激光器的起始掃描波長、終止波長、掃描速度的輸入,采集卡的采樣速率也可以通過輸入控件進(jìn)行設(shè)置,信號通道下拉菜單可以對信號的輸入通道進(jìn)行選擇.此外,為了提高數(shù)據(jù)的讀取效率,設(shè)置了用于調(diào)整采樣段長與采樣段數(shù)的輸入控件.為了直觀地顯示光譜信息,圖中右側(cè)的4 個波形圖分別用于顯示原始采樣光譜、重采樣后的光譜、重采樣光譜的頻譜特性圖以及還原后傳感器的干涉光譜.理論上可以做到全部傳感器光譜的顯示,由于目前復(fù)用規(guī)模較小,為了清晰地顯示單個光譜的變化情況,顯示面板中只顯示了單個傳感器光譜的恢復(fù),之后會考慮進(jìn)行多個傳感器光譜的同時處理,利用還原光譜顯示控件作為帶通濾波的參數(shù)選擇參考,構(gòu)建多個傳感器光譜濾波參數(shù)數(shù)組,實(shí)現(xiàn)多個傳感器光譜同時恢復(fù).

圖8 數(shù)據(jù)采集處理軟件前面板Fig.8 Front panel of the data processing software
圖9 給出了數(shù)據(jù)采集處理軟件的后面板,后面板中對數(shù)據(jù)的主要操作包括采集卡配置、信號重采樣、FFT 頻譜分析、IFFT 光譜還原以及光譜存儲幾個部分,這3 個過程都涉及到大量的數(shù)據(jù)操作,開始時采用了LabView 內(nèi)置的VI 函數(shù)對光譜數(shù)據(jù)進(jìn)行處理,由于光譜數(shù)據(jù)量較大,處理效率較低.之后改用LabView 內(nèi)置的MATLAB 腳本VI 函數(shù)作為數(shù)據(jù)處理函數(shù),大大地提高了數(shù)據(jù)處理速度.本實(shí)驗中利用參考干涉儀作為參考時鐘對傳感光譜進(jìn)行等頻率重采樣,為了方便信號采樣,將時鐘信號減去基值后通過比較器將波形從正弦波轉(zhuǎn)換為方波,當(dāng)方波兩個相鄰采樣點(diǎn)出現(xiàn)正負(fù)跳變時,采集一個傳感信號點(diǎn),通過該種方法可以實(shí)現(xiàn)快速的傳感光譜重采樣.利用FFT 對重采樣的信號進(jìn)行頻譜特征分析,之后通過矩形窗截取傳感光譜的特征頻譜,實(shí)現(xiàn)傳感器光譜的恢復(fù).

圖9 數(shù)據(jù)處理軟件后面板Fig.9 Back panel of the data processing software
4 實(shí)驗驗證
在所設(shè)計的大容量傳感器復(fù)用系統(tǒng)中進(jìn)行了應(yīng)變和鹽度實(shí)驗.本文側(cè)重于分布式干涉式光纖傳感器的實(shí)現(xiàn),因而選取了應(yīng)變模擬壓力的測量效果,海洋的壓力通過增敏結(jié)構(gòu)以應(yīng)變的形式傳遞到光纖傳感器結(jié)構(gòu)上.在系統(tǒng)中接入了3 個傳感器,傳感器1 和傳感器3 為常見的基于單模-空心-單模結(jié)構(gòu)的光纖FPI 應(yīng)變傳感器,該傳感器通過在單模光纖中間熔接一段空心光纖制作;傳感器2 為利用單模光纖錯位熔接制作的雙FPI 級聯(lián)的溫鹽傳感器,該傳感器的制作方法可以參考本課題組的論文[12].首先將傳感器接入到FMCW 系統(tǒng)中,經(jīng)過采集軟件的重采樣之后,得到的復(fù)合光譜如圖10 所示.

圖10 重采樣后的復(fù)合傳感光譜Fig.10 Composite sensing spectrum after resampling
之后用FFT 分析了復(fù)合光譜的頻率特性,圖11展示出了光譜的頻譜特性,子圖中給出了接入3 個傳感器的頻譜情況,對應(yīng)整體頻譜中藍(lán)色橢圓圈出的部分.可以看出,由于本方案中采用的波長掃描范圍較大,所以光譜的頻率分辨力較高,可以區(qū)分同一傳感器內(nèi)的不同反射端面.圖中紫色的特征峰值是由于光纖法蘭連接處的反射造成的.可以明顯地看出,傳感器3 的光強(qiáng)遠(yuǎn)大于傳感器1 和傳感器2 的光強(qiáng),這是為了能夠區(qū)分傳感器位置.傳感器3接入的光為95%,傳感器3 的反射光強(qiáng)度接近前兩個傳感器的20 倍,且3 個傳感器是等間隔分布的,通過這種方法可以快速地找出系統(tǒng)中3 個傳感器的特征頻率.圖中綠色的特征頻率是由于傳感器以及法蘭之間的反射光拍頻形成的.
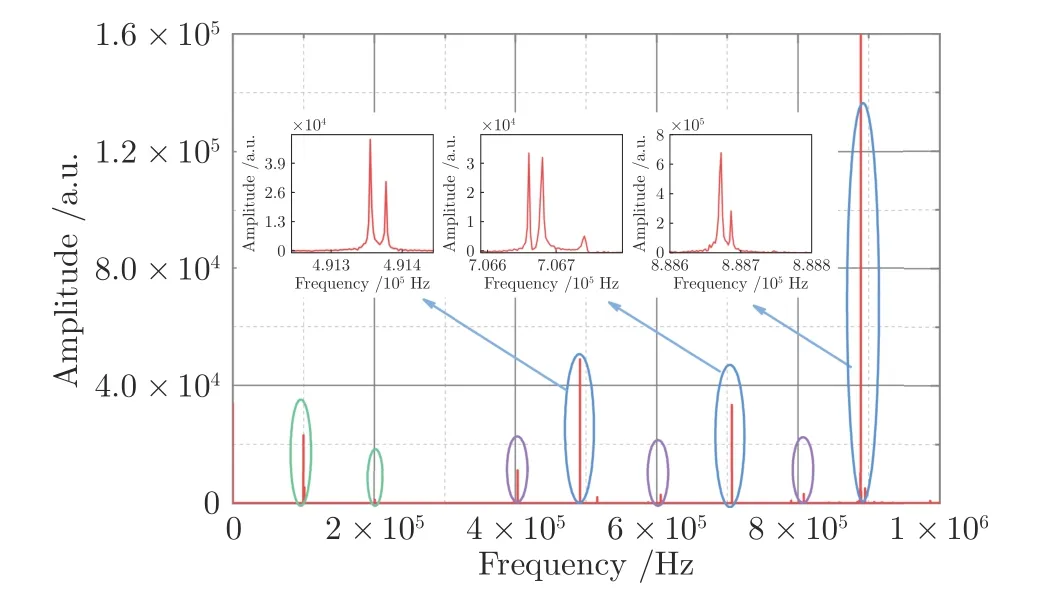
圖11 重采樣光譜的頻譜圖Fig.11 Frequency spectrum of the resampled spectrum
圖12 給出了傳感器的應(yīng)力測試系統(tǒng),通過三維位移滑臺用于固定光纖,鐵架臺用于懸掛光纖,將砝碼懸掛在光纖自由端,用于給傳感結(jié)構(gòu)施加定量的應(yīng)力.在彈性范圍內(nèi),光纖的應(yīng)力和所施加的質(zhì)量之間存在線性對應(yīng)關(guān)系.因為砝碼的質(zhì)量精度可以做到很高,本文采用砝碼懸掛法對光纖實(shí)現(xiàn)精確的應(yīng)變控制.
對傳感器中傳感器1 進(jìn)行應(yīng)力測試后,從數(shù)據(jù)處理軟件上得到了不同應(yīng)變下的光譜,對光譜數(shù)據(jù)進(jìn)行了處理.對獲取的干涉光譜進(jìn)行平滑與尋峰操作,得到了不同質(zhì)量下的干涉峰值,對不同質(zhì)量下的干涉峰值進(jìn)行擬合,得到的擬合結(jié)果如圖13(a)所示,可以看出,隨著所施加砝碼質(zhì)量的增加,干涉光譜的峰值波長表現(xiàn)出紅移響應(yīng),傳感器的靈敏度可以達(dá)到23.35 pm/g,擬合線性度可以達(dá)到0.997.圖13(b)給出了傳感器1 在同一質(zhì)量下連續(xù)監(jiān)測38 次的波長變化情況,測量標(biāo)準(zhǔn)差(Standard deviation,SD)可以達(dá)到40.85 pm,這可能是由于環(huán)境波動以及光源抖動等因素造成的.

圖13 應(yīng)力傳感器響應(yīng)特性((a)不同質(zhì)量下諧振波長擬合效果;(b)固定質(zhì)量下傳感器波長監(jiān)測)Fig.13 Responses of the strain sensor ((a)Wavelength fitting result under different weights;(b)Wavelength record under a fixed weight)
之后對雙FPI 級聯(lián)的溫鹽傳感器的鹽度(折射率)響應(yīng)特性進(jìn)行測試,將傳感器2 放置于設(shè)計的鹽度傳感平臺上.通過膠頭滴管向傳感平臺一側(cè)滴加鹽水,通過吸水紙從另一側(cè)吸收鹽水,將待測濃度的鹽水進(jìn)行3 次沖刷用于減小濃度差的影響.本方案中采用吸水紙的原因在于鹽水的表面張力相對于有機(jī)溶液較大,鹽水無法可靠浸入傳感結(jié)構(gòu)(或者傳感器的響應(yīng)時間較長),影響測試結(jié)果的準(zhǔn)確性.在實(shí)際應(yīng)用中不需要更換液體,只需要保證待測液體浸入到傳感器即可,可以考慮事先將傳感器結(jié)構(gòu)浸泡于有機(jī)溶液中.由于本傳感器結(jié)構(gòu)較小,浸泡需要的有機(jī)溶劑較少,對實(shí)際測量產(chǎn)生的影響可以忽略,測試環(huán)境由圖14 給出.鹽度測試采用的是海洋國家計量中心生產(chǎn)的中國系列標(biāo)準(zhǔn)海水.

圖14 傳感器鹽度特性測試裝置Fig.14 Salinity characteristic test device of the sensor
圖15 給出了傳感器的光譜情況,圖15(a)表示傳感器的原始光譜,這包含兩個FPI 傳感器的混疊光譜,通過帶通濾波器將兩個傳感器的光譜進(jìn)行恢復(fù),對鹽度敏感的傳感器光譜在圖15(b)中給出,對溫度敏感的傳感器光譜在圖15(c)中給出.可以看出,使用帶通濾波器可以很好地區(qū)分兩個傳感器光譜.

圖15 傳感器2 的光譜分解效果Fig.15 Spectrum decomposition of sensor2
本實(shí)驗中僅對鹽度響應(yīng)特性進(jìn)行測試,對不同鹽度下的響應(yīng)光譜進(jìn)行了分析.分析結(jié)果在圖16中給出,對光譜的特征峰值與鹽水濃度進(jìn)行了線性擬合,光譜隨著鹽度的增加表現(xiàn)出右移響應(yīng).傳感器的鹽度靈敏度可以達(dá)到242.58 pm/‰,擬合線性度可以達(dá)到0.9996,傳感器的鹽度和波長之間具有很好的響應(yīng)特性.該傳感器的鹽度靈敏度與文獻(xiàn)[17]基本是一致的,可以認(rèn)為傳感器的性能不受到復(fù)用系統(tǒng)影響.傳感器隨鹽度變化的波長移動量達(dá)到9.7 nm,光譜移動量接近光譜周期的2 倍,采用光譜峰值追蹤法無法進(jìn)行有效的光譜處理.本次實(shí)驗中,結(jié)合經(jīng)驗法對光譜進(jìn)行尋峰,之后的實(shí)驗可以考慮采用干涉光譜腔長解調(diào)技術(shù)對光譜進(jìn)行解調(diào)[12],就可以實(shí)現(xiàn)大動態(tài)范圍、高分辨力的光譜解調(diào).
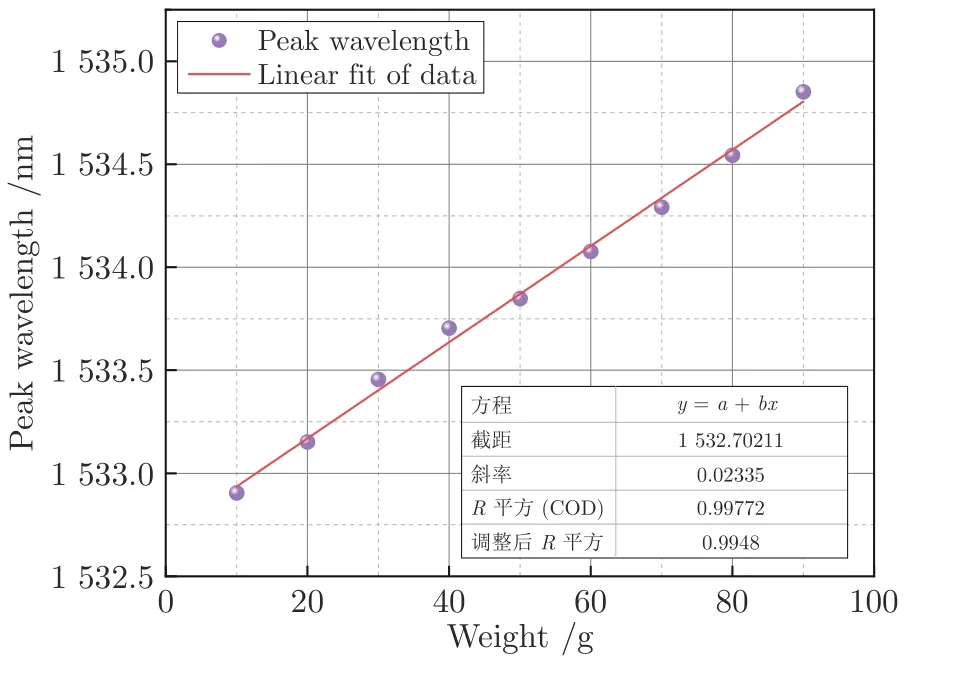
圖16 傳感器2 鹽度響應(yīng)特性擬合Fig.16 Salinity response characteristic fitting result of sensor 2
圖17 給出了傳感器在同一鹽度下光譜特征峰值連續(xù)監(jiān)測的效果,通過計算得到該傳感器的波長標(biāo)準(zhǔn)差為20.68 pm,對應(yīng)鹽度的標(biāo)準(zhǔn)差為0.085‰.連續(xù)監(jiān)測結(jié)果表明,傳感器在該復(fù)用系統(tǒng)中仍然可以實(shí)現(xiàn)較好的傳感效果.

圖17 傳感器2 鹽度光譜的連續(xù)監(jiān)測效果Fig.17 Continuous wavelength record of the salinity spectrum of sensor 2
5 結(jié)論
本文提出了一種基于FMCW 原理的干涉式光纖傳感器的復(fù)用方法,利用傳感器的反射端面和參考臂形成的Mach-Zehnder 干涉光譜之間的拍頻實(shí)現(xiàn)傳感器光譜還原,搭建了用于大容量傳感器復(fù)用的實(shí)驗系統(tǒng),編寫了用于數(shù)據(jù)采集與處理的軟件,實(shí)現(xiàn)了數(shù)據(jù)的實(shí)時采集以及對系統(tǒng)內(nèi)單個傳感器光譜的還原,測試了系統(tǒng)中傳感器的溫度和鹽度響應(yīng)特性,實(shí)驗結(jié)果表明,該復(fù)用系統(tǒng)在實(shí)現(xiàn)大容量傳感器復(fù)用的同時不影響單個傳感器的傳感性能.所提出的復(fù)用方法可以用于基于光纖傳感器陣列的海洋參數(shù)立體剖面監(jiān)測以及多點(diǎn)溫度監(jiān)測等應(yīng)用場合.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25