動車組車尾保持場景的深度分析和優化建議
2023-09-27 11:00:26徐華沙張超凡
鐵路通信信號工程技術 2023年9期
關鍵詞:設備
徐華沙,張超凡
(1.中國國家鐵路集團有限公司駐成都安全監督管理特派員辦事處,成都 610081;2.中國鐵路南寧局集團有限公司南寧電務段,南寧 531000)
南寧動車所至南寧東站方向咽喉區3 條動走線分別設置有10 m 長的輪對踏面診斷設備(簡稱輪對診斷區),該區段限速15 km/h,長度40 m,而車組從股道發車至該區段限速為30 km/h。根據《CTCS-3 級列控車載設備技術規范(暫行)》(鐵運[2012]211 號)中5.7 和7.4.3.3 節對最限制速度曲線計算和速度監控的規定,裝備300T、300S 型ATP 車載設備動車組進入該區段會進行降速,而經過該區段后限速條件為30 km/h,故車組在經過該區段后會進行車尾保持處理。本文結合實際案例深入分析300S、300T 型ATP 車載設備對車尾保持的不同處理邏輯,同時對南寧動車所輪對診斷區后的應答器位置設置提出優化建議。
1 運行場景
重聯動車組11G 發車,車組走行距離為35 m時,經過編號為4184 的應答器組(出站信號機外方第一組應答器),預告前方4 段速度變化信息:1)前方20 m 開始限速30 km/h(即車組走行距離為35+20=55 m 處),限速區段長度468 m。2)前方523 m 開始限速15 km/h(即車組走行距離為35+20+468=523 m 處),限速區段長度40 m(即輪對診斷區)。3)前方563 m 開始限速30 km/h(即車組走行距離為35+20+468+40=563 m 處),限速區段長度182 m。4)前方745 m 開始限速40 km/h(即車組走行距離為35+20+468+40+182=745 m 處),限速區段長度2 545 m,如圖1 所示。
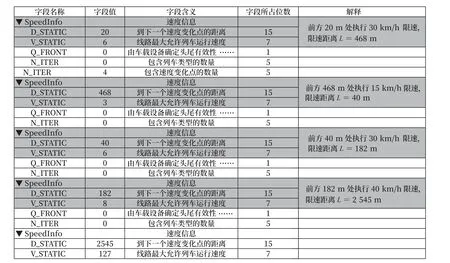
圖1 4184應答器組速度區段信息Fig.1 Speed restriction section information of balise group 4184
列車經過編號為4101 的應答器組(越過輪對診斷區進入區間第1 組應答器)時車組走行距離為954 m,預告前方2 段速度變化信息:1)限速40 km/h,限速區段長度3 130 m。2)限速80 km/h,限速區段長度1 465 m,如圖2 所示。
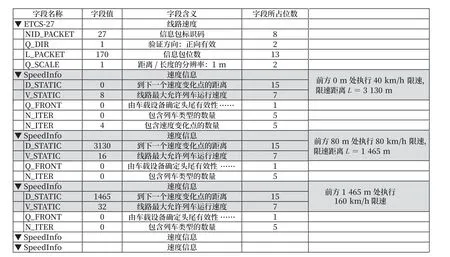
圖2 4101應答器組速度區段信息Fig.2 Speed restriction section information of balise group 4101
2 處理邏輯對比
結合應答器信息對300T、300S 型ATP 車載設備重聯車組執行車尾保持動作的不同處理邏輯進行對比,如圖3 所示。
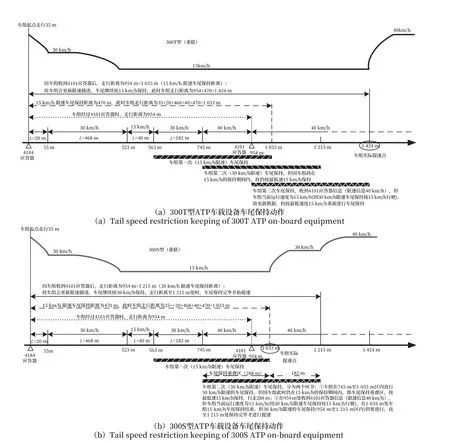
圖3 300T、300S型ATP車載設備車尾保持對比(重聯車組)Fig.3 Comparison of tail speed restriction keeping of 300T and 300S ATP on-board equipment (Recoupled trainset)
300T、300S 型ATP 車載設備在以下方面處理邏輯一致。
1)車組由低速區段進入升速區段時,按最不利限速曲線(MRSP)計算車尾保持。
2)車尾保持長度為車長420 m(重聯車組長度)+50 m(安全距離)=470 m。
3)車尾保持期間,若經過應答器收到新的限速描述(靜態限速SSP、臨時限速TSR),由于CTCS-2 系統中應答器數據采用覆蓋式更新(即直接采用更新后數據,不檢查與之前既有數據的一致性),則根據新限速數據重新計算MRSP 時要考慮應答器數據更新之前的限速值。若更新之前的限速值低于更新后的應答器描述限速值,則進行車尾保持,保持的長度仍是車長420 m(重聯車組長度)+50 m(安全距離)=470 m。由圖3 看出,車組在走出最低限速15 km/h(L=40 m)后進入提速區段(30 km/h,L=182 m),300T、300S均按MRSP 進行車尾保持。兩者車頭走出限速為15 km/h 區段并進行車尾保持后的走行距離均為:35+20+468+40+470=1 033 m。
300T、300S 型ATP 車載設備在車尾保持期間的限速更新有不同的處理邏輯。
1)對于4184 應答器組中第3 條靜態速度的處理
a.300T 型車載設備處理邏輯:因該限速區段仍在4184 應答器第2 條靜態速度描述的15 km/h車尾保持期間(30 km/h 起點為563 m 處,15 km/h車尾保持結束點為1 033 m 處),則其雖對新限速數據重新計算MRSP,但因之前的限速值(15 km/h)低于新限速值(30 km/h),則MRSP 仍按最低速度(15 km/h)進行車尾保持,即忽略更新限速。
b.300S 型車載設備處理邏輯:車頭走出限速為15 km/h 區段(L=40 m)后,對新限速數據重新計算MRSP,但之前的限速值(15 km/h)低于新限速值(30 km/h),則MRSP 按最低速度(15 km/h)進行車尾保持。當車頭走出限速為30 km/h 的區段(L=182 m)后,將同步進行兩個車尾保持處理,其一為15 km/h 限速剩余的車尾保持距離(1 033-745=288 m),在該區段內車組按最低速度(15 km/h)運行;其二為開始進行30 km/h 限速的車尾保持。對新限速數據(4184 應答器組中第4 條靜態速度描述)重新計算MRSP,因之前的限速值(30 km/h)低于新限速值(40 km/h),則MRSP 按最低速度(30 km/h)進行車尾保持。圖3 中15 km/h 和30 km/h 車尾保持的過程中有一段288 m 的重疊區,取最低限速(15 km/h)進行車尾保持。在車組走行至1 033 m 處時,15 km/h 車尾保持結束,車組繼續按30 km/h 進行車尾保持,故車組提速至30 km/h。
2)4101 應答器組中第1 條靜態速度的處理
a.300T 型車載設備處理邏輯:在收到4101應答器組描述的40 km/h 報文處,仍在4184 應答器第2 條靜態速度描述的15 km/h 車尾保持期間(40 km/h 起點為954 m 處,15 km/h 車尾保持結束點為1 033 m 處)。則其雖對該新限速數據重新計算MRSP,但因之前的限速值(15 km/h)低于新限速值(40 km/h),則MRSP 按最低速度(15 km/h)重新進行車尾保持。在行至1 424 m處954+470=1 424 m 處時車尾保持結束,車組開始提速至40 km/h。
b.300S 型設備處理邏輯:車頭走出限速為30 km/h 區段后,行至954 m 處收到4101 應答器描述的40 km/h 報文,此時車組仍在15 km/h 和30 km/h 的車尾保持期間。對新限速數據重新計算MRSP,仍按最低速度(15 km/h)進行車尾保持;行至1 033 m 處時,車組15 km/h 車尾保持結束,但此時車組還在30 km/h 的車尾保持期間,故限速提至30 km/h;行至1 215 m 處時,車組30 km/h車尾保持結束,車組開始提速至40 km/h。
由以上分析可知,300S 型車載設備在收到新限速描述后升速區段的車尾保持是同時進行計算的。300T 型車載設備在收到新限速描述后,若升速區段在前一段低限速的車尾保持期間,則仍按前一段低限速重新進行車尾保持。兩者對比,在本案例中升速點相差1 424-1 033=391 m。
3 改進方案
結合上述分析可知,兩種設備執行車尾保持動作期間接收到同一組應答器信息后,實際提速位置不同,在本案例中300T 型設備相較于300S 型設備要“多”走行391 m 才進行提速。有以下3 個建議改進方案。
3.1 方案一
兩種設備對于車尾保持的處理邏輯雖不同,但均依據《CTCS-3 級列控車載設備技術規范(暫行)》(鐵運[2012]211 號)文件5.7 節和7.4.3.3 節對最限制速度曲線計算和速度監控的規定中對車尾保持的處理邏輯沒有給出具體的約束要求,故不同廠家間會有所異同。而從運輸效率來看,300S 型車載設備對于不同限速的車尾保持處理是同時進行計算的,能夠較快執行限速條件,效率會更高。300T 型車載設備對車尾保持處理雖進行了更嚴格的約束,但對運輸效率會有一定影響,如本案例中4184 應答器組中第3條靜態速度30 km/h 的限速條件對于該型設備而言“形同虛設”。故改進方案一是參照300S 型車載設備對車尾保持的處理邏輯,修改300T 型車載設備車尾保持邏輯,使兩者一致。
3.2 方案二
修改地面應答器信息。在本案例中4184 應答器組中第3 條靜態速度30 km/h(L=182 m)的限速條件,300S 型設備實際執行起點為1 033 m 處至1 215 m 處結束,而300T 型設備未按預期報文執行。故可考慮將4184 應答器組中第2 條靜態速度15 km/h(L=40 m)與第3 條靜態速度30 km/h(L=182 m)信息合并修改為靜態速度15 km/h(L=222 m),同時將4101 應答器組中第1 條靜態速度40 km/h(L=0 m)修改為靜態速度40 km/h(L=79 m)。目的主要是為避免300T 型設備的第3 次車尾保持,而將其提前至1 215 m 處(比之前提早1 424-1 215=209 m),如圖4 所示。
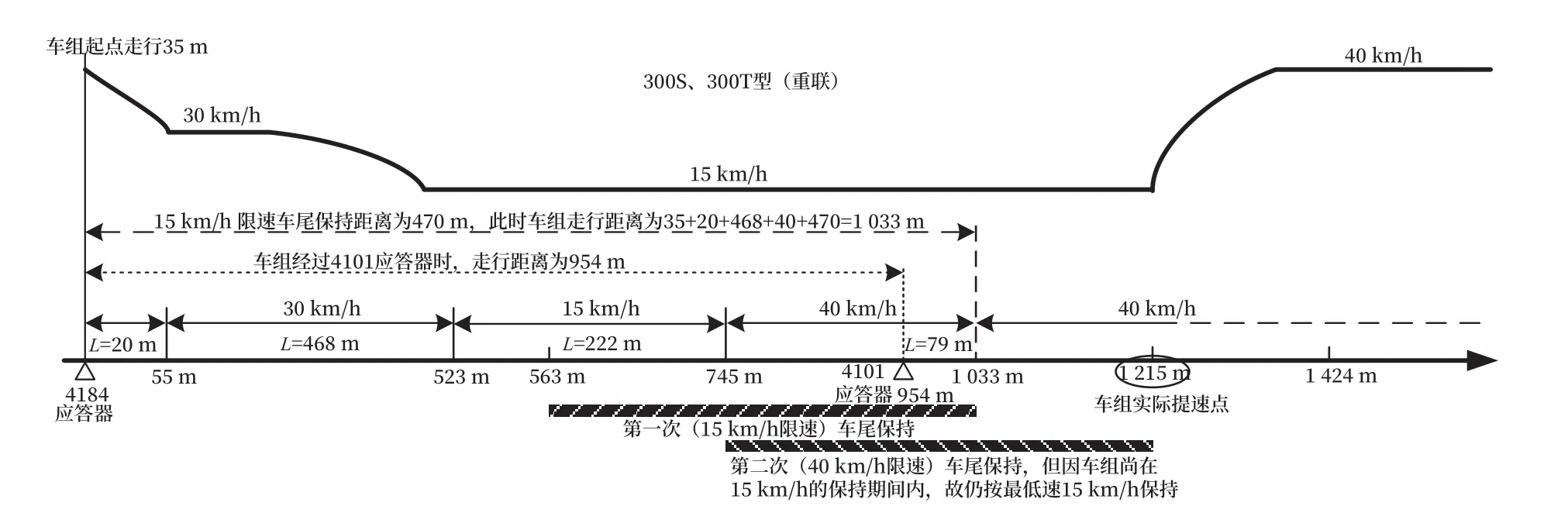
圖4 改進方案二Fig.4 Improvement plan II
3.3 方案三
修改地面應答器信息。將4184 應答器組中第3 條靜態速度30 km/h(L=182 m)信息與第4 條靜態速度40 km/h 信息進行合并,統一修改為限速40 km/h(L=2 727 m),同時將4101 應答器組中第1 條靜態速度40 km/h(L=0 m)修改為靜態速度40 km/h(L=79 m)。目的是為避免300T 型設備的第3 次車尾保持,而將其提前至1 033 m 處(比之前提早1 424-1 033=391 m)。修改后兩種設備實際提速點可歸為一致,均為1 033 m 處,如圖5 所示。
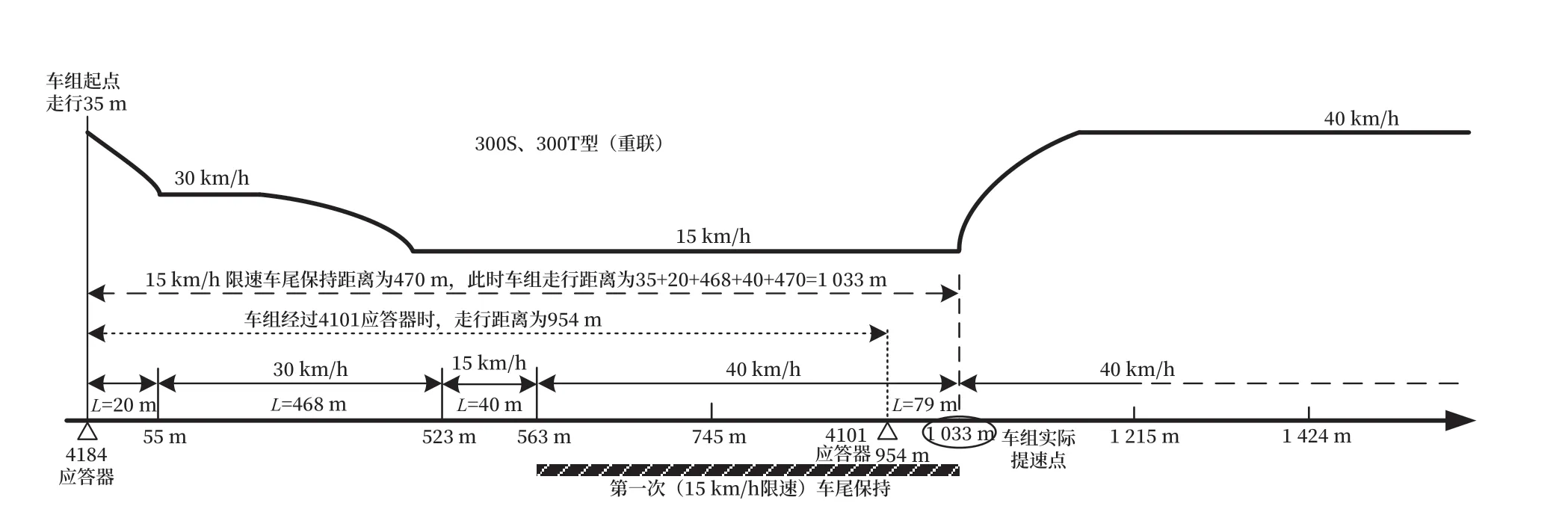
圖5 改進方案三Fig.5 Improvement plan III
3.4 改進方案優缺點比較
方案一:只在車載設備側進行改進(修改軟件),不涉及地面設備,相對操作比較簡單。但文中所提及的場景并非普遍存在,且修改ATP 設備軟件需經過非常嚴格的調研審批、試驗認證等環節,周期長、耗費人力物力大,故修改軟件可能性很小。方案二:修改后兩種設備實際提速點(40 km/h)可歸為一致,均為1 215 m 處。且1 215 m 處之后地面設備滿足40 km/h 的走車條件(修改前300S 型提速至40 km/h 起點即為1 215 m 處)。但修改前300S 型設備在1 033 m 處至1 215 m 處區段內第一次提速為30 km/h 將走行182 m,而修改后運行速度將變為40 km/h,且實際提速點后移(1 215-1 033=182 m),如圖4 所示。方案三:該方案將兩種設備40 km/h 實際提速點歸為一致,均為1 033 m 處。從運輸效率看可行性最高,但在1 033 m 處至1 215 m 處的182 m 區段內,只有300S 型設備以30 km/h 的速度運行過,且將4184 應答器組中第3 條靜態速度由30 km/h 提升為40 km/h,須與設計部門進一步論證確認該區段內的地面設備是否滿足40 km/h 的走車條件。
4 結束語
結合動車組通過南寧動車所至南寧東站方向咽喉區輪對踏面診斷設備區段車尾保持場景和地面應答器設置情況,動車組運行速度沒有及時提速和通過速度低(15 km/h 以下),司機操控困難、影響動車組通過咽喉區的效率等實際情況,對比300T、300S 型ATP 的車尾保持處理邏輯分析,提出改進方案。依據4184 的應答器組第4 條報文描述(745 m處可提速至40 km/h,如圖1 所示)及4101 的應答器組第1 條報文描述(954 m 處可提速至40 km/h,如圖2 所示),說明設計條件在745 m 處之后即允許運行40 km/h,同時通過對現場設備進行調研,1 033 m 處至1 215 m 處182 m 區段內的地面設備滿足40 km/h 的走車條件。與設計部門進一步論證確認實施后,可緩解南寧動車所至南寧東站方向咽喉區動車組通過效率,提高運輸效益。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00