一種無線充電循跡小車控制系統(tǒng)的探究與設(shè)計
2023-09-27 14:20:48郝覃卓韓帥龍江成茹鵬佟維妍
電子制作 2023年17期
郝覃卓,韓帥龍,江成,茹鵬,佟維妍
(沈陽工業(yè)大學 化工過程自動化學院,遼寧遼陽,111003)
0 引言
近年來,使用無線充電技術(shù)的循跡小車在許多文獻中均有涉及,例如《基于超級電容和OpenMV4 的無線充電循跡電動小車設(shè)計》一文中提出利用磁耦合共振的方法,將直流電轉(zhuǎn)換為交流高頻電,經(jīng)整流后為超級電容組充電,并通過OpenMV4 攝像頭視覺處理循跡行駛;《動態(tài)無線充電循跡小車系統(tǒng)的設(shè)計與實現(xiàn)》一文中設(shè)計驅(qū)動模塊由兩個法拉電容、核心驅(qū)動模塊以及兩個電機構(gòu)成。本文借鑒融合其中的優(yōu)點并改進不足,提出一種新的無線充電循跡小車控制系統(tǒng)。
1 總體設(shè)計方案
該系統(tǒng)使用無線充電裝置對小車進行無線動態(tài)充電,該無線充電裝置由無線供電發(fā)射模塊和無線供電接收模塊組成。無線供電發(fā)射模塊通過逆變電路和諧振電路將直流電轉(zhuǎn)換為高頻交流電,送至發(fā)射線圈內(nèi),無線供電接收模塊的接收線圈在電磁感應作用下接收高頻交流電,再通過整流濾波電路將交流電轉(zhuǎn)換為直流電,產(chǎn)生的電能被存儲在超級電容中。
超級電容由4 個2F、5.5V 法拉電容并聯(lián)組成,輔以二極管保護。因為法拉電容的放電過程不均勻,而單片機卻需要穩(wěn)定的電壓供應,所以使用超低功耗的DC-DC 升降壓芯片—TPS63001 進行穩(wěn)壓。無線充電模塊接收到的電壓通過DC-DC 轉(zhuǎn)換為5V 恒流電源電壓,為超級電容充電,并且通過OLED 屏幕顯示電量。充電1 分鐘后充電裝置斷電,單片機通過ADC 檢測供電接收模塊的電壓輸出情況來判斷充電是否結(jié)束,通過兩個紅外循跡模塊返回的電信號,處理后控制左右電機的運動來實現(xiàn)循跡功能。隨后小車自啟動并進入自動循跡行駛模式。總體框圖如圖1 所示。

圖1 總體設(shè)計框圖
2 硬件電路設(shè)計
本系統(tǒng)主處理器采用MSP430F149 單片機,具有快速蘇醒、低電壓、超低功耗等特點。通過控制系統(tǒng)調(diào)控紅外循跡模塊和電機驅(qū)動模塊,使小車在規(guī)定軌道內(nèi)循跡行駛。外部電源經(jīng)過無線供電模塊轉(zhuǎn)換后,對控制系統(tǒng)提供5V/1A的直流電源輸入。
■2.1 主控模塊
通過該模塊可控制無線充電裝置的自動啟停和小車循跡行駛。MSP430F149 微處理器通過ADC 檢測供電接收模塊的電壓輸出情況來判斷充電是否結(jié)束,通過兩個紅外循跡模塊返回的電信號,處理后控制左右電機的轉(zhuǎn)動來實現(xiàn)循跡功能。
■2.2 無線供電發(fā)射接收模塊
無線供電發(fā)射接收模塊包含XKT-510 芯片(發(fā)射端)和T3168 芯片(接收端)兩個無線供電模塊,與使用線圈耦合的方案相比,本方案具有體積小、能源轉(zhuǎn)變效率高、設(shè)計簡單的優(yōu)勢。無線供電發(fā)射模塊及接收模塊原理圖如圖2所示。

圖2 無線供電發(fā)射及接收模塊原理圖
(1)發(fā)射端設(shè)計
發(fā)射電路的核心元件為XKT-510 芯片,XKT-510 電路簡單,具有電能傳送和電磁能量轉(zhuǎn)換效率高、穩(wěn)定性好、精確度高等優(yōu)勢,只需配合極少的外部元件就可以做成可靠性高、適用范圍廣的無線供電發(fā)射模塊。芯片能夠?qū)⒅绷麟娹D(zhuǎn)變?yōu)榻涣麟姡ㄟ^逆變電路和諧振電路將轉(zhuǎn)換后的交流電發(fā)送至發(fā)射線圈內(nèi),當發(fā)射線圈和接收線圈互相貼近時,接收線圈會在電磁感應作用下接收來自發(fā)射線圈的交流電,最后以直流電的形式向外輸出,為超級電容裝置充電。
直流電源可通過XKT-510 芯片實現(xiàn)自適應供電電壓調(diào)控,通過運用電容C 跟電感L 的儲能特性,使得電磁在這兩種元件之間交替轉(zhuǎn)化,產(chǎn)生高頻正弦波信號,從而生成交流電。再利用線圈的電磁感應作用把電能傳送到接收模塊中,諧振頻率可用公式F=計算。此模塊的設(shè)計頻率為200kHz。
(2)接收端設(shè)計
T3168 芯片是接收電路的核心元件,具有體積小、輸出功率大、電路簡單、適配度高的優(yōu)點,可用于多種電子產(chǎn)品的電池充電和無線供電。主體由外圍的并聯(lián)諧振電路、整流電路和濾波電路構(gòu)成。當發(fā)射、接收模塊的并聯(lián)諧振電路均處于諧振狀態(tài)時,高頻正弦波信號達到峰值,此時能量傳輸效率也達到峰值,線圈接收到的交流電經(jīng)過整流、濾波整合處理后,最終輸出5V 直流電,為小車提供穩(wěn)定的工作電壓。
■2.3 穩(wěn)壓電源模塊
超級電容由4 個2F、5.5V 法拉電容并聯(lián)組成,輔以二極管保護。無線供電模塊接收到的電壓通過PWM 控制型DC/DC 轉(zhuǎn)換器轉(zhuǎn)換為5V 恒流電源電壓,給超級電容充電。超級電容放電時電壓不斷下降,放電過程不均勻,為保證其他元器件供電正常,并盡可能充分利用其中的電能,就需要能夠自動升降壓的穩(wěn)壓電路。超低功耗的TPS63001 芯片是一款高效升降壓轉(zhuǎn)換器,具有穩(wěn)壓輸出和負載斷開時芯片自動關(guān)閉的功能,工作效率最高達到95%,可以作為無線充電小車的主要穩(wěn)壓電路,使超級電容在放電過程中穩(wěn)定輸出5V,從而實現(xiàn)系統(tǒng)的穩(wěn)定運行。超級電容模塊原理圖如圖3 所示,穩(wěn)壓模塊原理圖如圖4 所示。
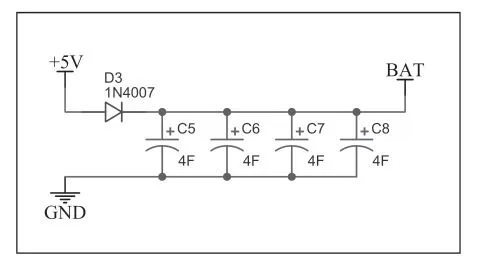
圖3 超級電容模塊原理圖

圖4 穩(wěn)壓模塊原理圖
■2.4 電機驅(qū)動模塊
HR8833-雙通道H 橋電機驅(qū)動芯片能在低壓狀態(tài)下運作,HR8833 有兩路H 橋驅(qū)動,可以驅(qū)動兩個直流有刷電機,或者一個雙極步進電機及其他感性負載。H 橋驅(qū)動器每一個橋的功率輸出模塊由N 通道功率MOSFET 組成,每個橋包含整流電路和限流電路,內(nèi)部關(guān)斷功能包含過流保護、欠壓鎖定保護、短路保護和過溫保護,并提供一個故障檢測輸出管腳。通過PWM 波輸入值A(chǔ)IN 與BIN 驅(qū)動電機運轉(zhuǎn),可調(diào)整PWM 波占空比與電機轉(zhuǎn)速,該設(shè)計實現(xiàn)了電機正轉(zhuǎn)、反轉(zhuǎn)的功能。系統(tǒng)啟動后,利用MSP430F149 微處理器I/O 口輸出的PWM 波驅(qū)動電機,通過分別控制左輪和右輪的速度和方向來完成無線充電循跡小車啟動、加速、減速、差速轉(zhuǎn)彎、剎車等功能。
■2.5 紅外循跡模塊
紅外循跡模塊主要由TCRT5000 傳感器構(gòu)成,TCRT5000的檢測反射距離適用區(qū)間為1mm~25mm,使用寬電壓LM393 比較器輸出,配有多圈可調(diào)精密電位器調(diào)節(jié)靈敏度,具有驅(qū)動能力強、信號干凈、波形工整的優(yōu)點。當不斷發(fā)射的紅外線未被反射或強度較弱時,紅外接收管斷路,此時傳感器輸出端為高電平,指示二極管熄滅;當物體出現(xiàn)在檢測范圍內(nèi)時,紅外線被反射回且強度足夠大,紅外接收管飽和,傳感器的輸出端為低電平,指示二極管亮起。根據(jù)此原理可實現(xiàn)小車循黑色軌跡行駛,遇到白色空地時停下。
3 軟件程序設(shè)計
軟件程序設(shè)計采用MSP430F149 微處理器作為主控元件,單片機接通電源時立刻開始計時,同時無線供電模塊開始給超級電容充電,定時器計時1min 后,單片機和穩(wěn)壓電源相連接的繼電器斷開后共同切斷無線供電模塊的電源,小車隨之被啟動,單片機的定時器模塊確保小車在連續(xù)充電1min 以后不再充電。行駛時紅外循跡模塊對規(guī)劃路線循跡,據(jù)此判斷小車中軸線是否偏離黑線及偏離程度,進而控制舵機的轉(zhuǎn)向以及使左、右側(cè)電機的轉(zhuǎn)速產(chǎn)生差異,實現(xiàn)差速轉(zhuǎn)彎。小車持續(xù)前進直到紅外循跡模塊識別到達指定地點。
MSP430F149 微處理器通過采樣可以檢測電機兩端電壓的大小和與循跡模塊紅外探頭并聯(lián)的電容電壓大小,以此控制微控制器輸出PWM 波的頻率。當PWM 波處于高電平時MOS 管導通,電機驅(qū)動工作,小車車輪轉(zhuǎn)動;當PWM波處于低電平時MOS 管不導通,電機驅(qū)動不工作,小車車輪停止轉(zhuǎn)動。PWM 的高電平和低電平交替產(chǎn)生,以此控制電機驅(qū)動。在動態(tài)充電過程中,電動小車遇到黑色的充電線圈時,循跡模塊紅外探頭的光敏電阻兩端電壓減小,MSP430F149 微處理器通過ADC 采樣的兩個通道同時檢測到兩端電阻電壓減小。程序片段如下:
4 測試結(jié)果
表1 中五個實驗組的超級電容均為4 個2F/5.5V 電容并聯(lián)組成。

表1 供電模塊數(shù)據(jù)
5 結(jié)語
本文給出了一種無線充電循跡小車控制系統(tǒng)的設(shè)計方案,此方案包括以MSP430F149 微處理器為核心的主控模塊、無線供電模塊、穩(wěn)壓電源模塊、電機驅(qū)動模塊與紅外循跡模塊。根據(jù)超級電容存儲電壓及距離測試結(jié)果數(shù)據(jù),均已論證本設(shè)計的合理性與可行性。