無人機傾斜攝影測量在農村不動產測量中的應用
2023-09-25 07:23:32曾毅
智能城市 2023年8期
曾 毅
(長江空間信息技術工程有限公司(武漢),湖北 武漢 430010)
利用無人機進行地籍測量的主要工作就是收集土地及其附著物的土地基本信息,以數據、圖表的形式表現,滿足土地稅收、土地利用規劃及土地產權保護等土地利用需求,為相關部門提供相應數據支持[1]。目前,在進行大比例尺小范圍的地籍測繪作業時,運用無人機攝影測量技術獲取正射影像和三維模型數據已成為一種經濟合理的手段。傳統地籍測量通常采用解析法進行野外界址點坐標的測量,解析法包括極坐標法、內外測距法和支導線法[2]。運用極坐標法可以測量到待測范圍內的全部界址點,但所測的坐標值會受導線最薄弱點、分支導線點和圖根點誤差傳遞的影響,導線邊和水平角也會受到誤差影響[3]。采用無人機測量技術測繪地籍圖,是在空三加密過程中運用光束法平差或區域網平差的方法獲取權屬界址點坐標,得到的坐標精度分布均勻,且不存在誤差傳遞,尤其是在建筑物比較密集的城區或鄉鎮,利用無人機技術進行測量能夠節省大量的時間和精力。
1 無人機傾斜攝影測量原理及關鍵技術
1.1 無人機攝影測量原理
無人機技術是通過無線電波的遠程操縱,在無人駕駛的情況下完成。無人機的飛行遙控平臺包括3種飛行方式,分別是人工操控、半自主飛行或是全自主飛行。目前無人機測量飛行平臺主要搭載傳感器設備(非量測數碼相機),在待測區域進行像控點的選擇,在無人機操作系統中規劃飛行區域與飛行線路,獲得低空遙感影像數據,通過圖像處理軟件進行像片的接邊,獲得數字正射影像圖。無人機測量技術的作業流程包括飛行任務的提出、技術準備、航攝分區、航線設計、像控點布設與量測、航空攝影和觀測后數據檢查等步驟。無人機測量技術是一種可以實時自動獲取測繪工作所需的空間信息,再以圖像處理軟件作為輔助技術支持的全新測繪技術[4]。與傳統的航飛方式相比,無人機以其低風險、低空機動性能好、操作簡易、方便攜帶、性價比高、成本低廉等獨特優勢,得到廣泛應用[5]。
1.2 傾斜攝影測量的關鍵技術
1.2.1 多視影像的聯合平差
多視點圖像不僅包含各種垂直式立體攝影的圖像數據,還包含了各種傾斜式立體攝影的圖像數據。在視點圖像的各種角度層次上對多個同名點圖像進行自動角度匹配和采用自由格光束法平差,獲得更良好的圖像同名點自動匹配顯示效果[6]。同時建立了多視點影像自檢區域網平差中連接點、連接線、控制點坐標和GPS/IMU輔助數據的全網誤差分析計算處理方程,通過相互之間聯合的解析運算,保證了全網平差處理結果的計算準確性。
1.2.2 多視影像的密集匹配
影像匹配是實現攝影測量的根本性問題之一。多視影像技術具備覆蓋廣、分辨率高的優勢,因此多視影像匹配的第一步就是快速、準確地從多視點的地物上獲取三維信息[7]。近年來,多基元、多視點圖像匹配逐漸成為研究的熱點。目前,建筑物可通過搜索更直觀的二維圖像特征,例如邊緣、墻體結構和其紋理,幫助確定二維向量數據集的結構,將不同視角的二維圖像特征轉化成三維。在確定建筑物的墻面時,可以選擇多個參數因素給予一定權重,將建筑物的墻面區域劃分為不同形狀和類別,進行平面化掃描和分割,得到相應的建筑物側邊區域。對側邊部件結構進行再造,提取出建筑物屋頂的層次及其輪廓。
2 無人機測量技術進行地籍測量中的應用
2.1 像控點布設
為提高內業操作的準確性,控制點應選用較尖的標記;控點標志的尺寸應大于70 cm,具體點位應明確標示;控點應盡可能平坦,以避免有遮擋;可以根據地圖的不同選擇持久性存在的事物,例如噴涂、膠布等,像控點上的標記物應該與其他地表的顏色有鮮明對比。
為了確保最終數據的準確性,在拍攝前必須布設像控點標志。在混凝土路面、瀝青路面等硬地面上選擇圖像控制點時,一般采用油漆對圖像控制點進行標記;圖像控制點選擇在土壤較軟的地方時,通常使用黏土粉作為圖像控制點標記。
2.2 試驗區概況
本次試驗區域為陜西某縣,總面積600 km2,地勢平坦,地形高差在10 m以內。主要地物為1~3層房屋,農田、池塘、樹林等。無人機作業時間為13:00~15:00,在該時間段內,測區內天氣晴朗,光線適中,1~2級微風,適合飛行。
2.3 航線規劃方案和航飛參數設計
(1)本實驗測量區域為村莊,面積較小且位置分布、覆蓋范圍較廣,計劃兩天完成飛行任務,采用CGCS2000坐標系,1985國家高程基準,明確成果格式為原始航拍影像格式、像控點點之記等。
(2)確定無人機機型,選擇輕小型翼無人機,相機型號為PSDK102S1075Y,焦距為35.652 mm,影像尺寸為6 000 像素×4 000 像素。
(3)明確航飛區域,是否為禁飛區,利用奧維地圖查看測區地況,確認無飛行限制。
(4)掌握測量當天的天氣情況,在日出到9:00、15:00到日落兩個時間段完成飛行任務。
(5)結合實際地形,將航高適當降低,按優于規定分辨率的要求進行航飛。
(6)重疊度設置需要滿足規定的要求。
(7)旋偏角設置不大于15°,滿足重疊度情況下,不大于30°。
(8)檢查單張影像是否存在欠曝、過曝、云層較多等情況;檢查整個測區(用生產快視拼圖查看)是否存在漏片、錯拍、空洞等情況,發現后須及時進行補拍。
本試驗設計航高為90 m,地面分辨率(GSD)為1.5 cm,按照常規地籍測量航向80%旁向重疊度70%進行作業。航片地物輪廓清晰、色彩均勻,滿足項目的使用要求。
2.4 數據處理及模型效果
2.4.1 空三結果
將前端獲得的數據經Context Capture數據處理軟件整理后,輸入所布設的實測的像控點坐標,在圖像上刺點,得益于相機出色的光學組件,空三解算一次通過,未發生分層等問題。
2.4.2 模型效果
本項目建立的模型效果較好,無拉花、破洞現象,墻面平直,邊角較為分明,適合后期DLG的生產。
模型效果如圖1所示。
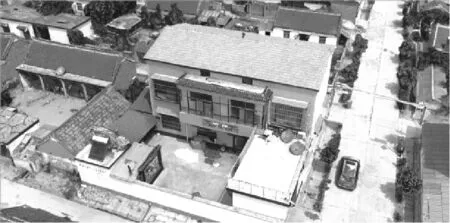
圖1 模型效果
三維模型精度檢查如表1所示。
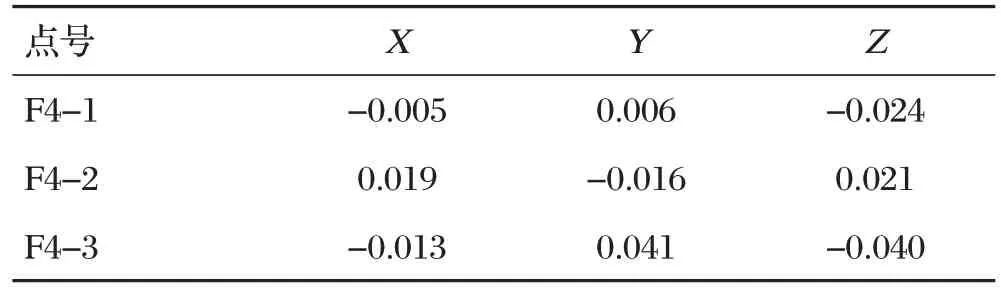
表1 三維模型精度檢查 單位:m
點位誤差值最大為4.0 cm,最小值為0.7 cm,X方向最大誤差是1.9 cm,Y方向最大誤差是4.1 cm。對模型進行整體分析,模型整體精度較高,上述誤差均滿足規定項目精度需求和平面精度規范要求。
2.4.3 地籍圖繪制
基于項目完成的真三維模型,使用EPS軟件,以模型為基礎繪制了DLG,并進行了精度驗證,驗證的結果滿足項目要求。地籍圖繪制如圖2所示。
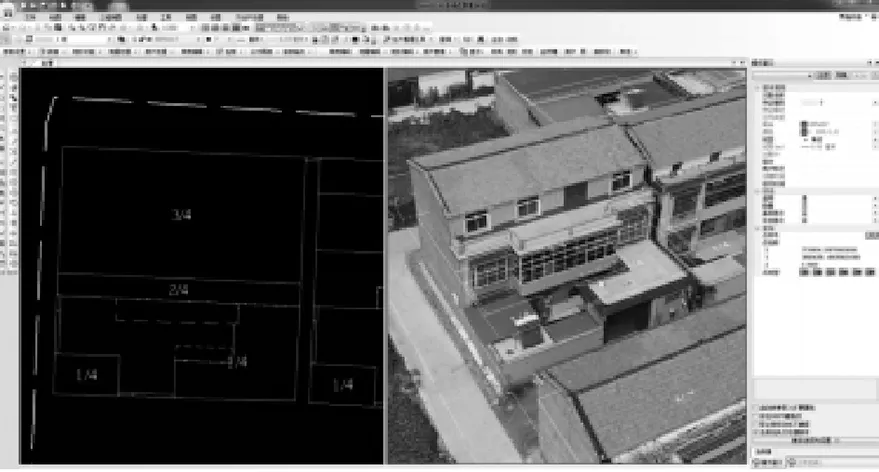
圖2 地籍圖繪制
2.5 界址點點位精度結果統計
以最終繪制的DLG為基礎,檢驗界址點的實測精度與繪圖精度差值,精度校驗結果如表2所示。檢核點平面點位中誤差2.89 cm,滿足《國家基本比例尺地形圖更新規范》(GB/T 14268—2008)、《地籍調查規程》(TD/T 1001—2012)等規范中的不大于5.00 cm的要求,最大允許誤差≤10.00 cm的要求,故將傾斜攝影測量應用到房地一體中具有可行性,滿足項目要求,充分彌補了傳統單點式地籍測量作業的局限性。
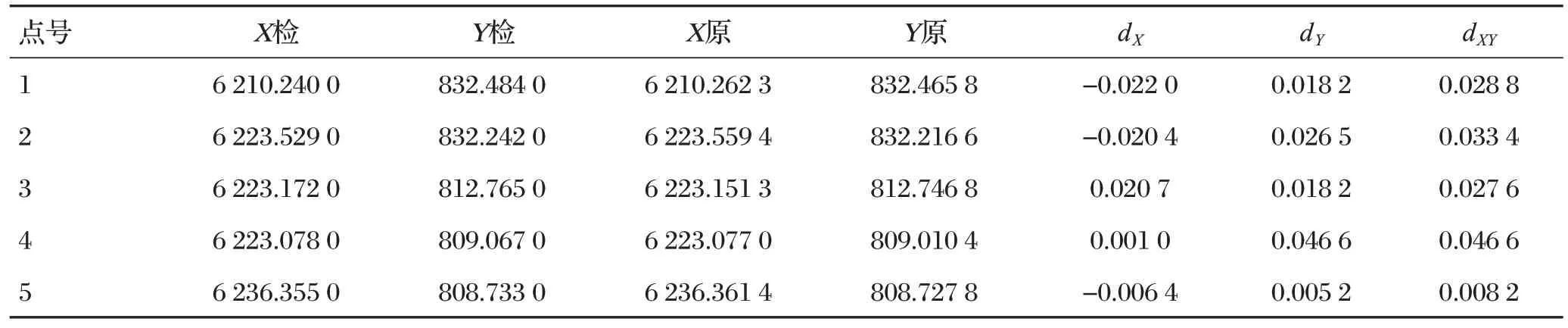
表2 界址點點位精度統計 單位:m
3 結語
本項目采用無人機航空攝影測量作為技術手段,通過無人機外業航飛、像控測量、三維模型制作、線劃圖采集等流程,獲取農村房屋不動產登記所需的地籍和房產測量數據。無人機加多鏡頭相機的組合模式,相較于傳統人工測圖方式,在效率方面大幅度提高,減小了測繪外業人員的工作強度,經實地采集檢查點進行數學精度檢查,界址點成果精度完全滿足地籍測繪成果精度要求,成果數據可靠,將傾斜攝影測量運用到不動產測量中,使用Context Capture軟件進行內業數據處理,具有較好的可行性,未來將成為地籍數據獲取的重要技術方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03