服務(wù)器無感知計(jì)算場景下基于時(shí)空特征的函數(shù)調(diào)度
2023-09-22 06:21:24吳秉陽劉方岳章梓立賈云杉
計(jì)算機(jī)研究與發(fā)展 2023年9期
金 鑫 吳秉陽 劉方岳 章梓立 賈云杉
(北京大學(xué)計(jì)算機(jī)學(xué)院 北京 100871)
(高可信軟件技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室(北京大學(xué)) 北京 100871)
(xinjinpku@pku.edu.cn)
隨著云計(jì)算技術(shù)的發(fā)展,在云計(jì)算平臺(tái)上開發(fā)和部署應(yīng)用已經(jīng)成為一種主流方式.傳統(tǒng)云計(jì)算平臺(tái)將資源以虛擬機(jī)和容器等形式提供給用戶.除了開發(fā)應(yīng)用邏輯外,用戶還需要進(jìn)行虛擬機(jī)和容器等資源的配置和管理.服務(wù)器無感知計(jì)算[1]是一種新興的以函數(shù)為中心的云計(jì)算范式.服務(wù)器無感知計(jì)算向用戶提供高層次的函數(shù)抽象在云計(jì)算平臺(tái)開發(fā)和部署應(yīng)用程序,讓用戶可以專注于應(yīng)用邏輯的開發(fā),而無需關(guān)注資源的配置和管理.
服務(wù)器無感知計(jì)算(serverless computing)以函數(shù)為粒度分配資源.用戶基于函數(shù)抽象編寫應(yīng)用程序,并將其打包為函數(shù)鏡像部署于服務(wù)器無感知計(jì)算平臺(tái).當(dāng)函數(shù)請求到來時(shí),函數(shù)請求被發(fā)往服務(wù)器無感知計(jì)算調(diào)度器,由調(diào)度器負(fù)責(zé)函數(shù)請求的調(diào)度和執(zhí)行.調(diào)度器在集群中找到空閑服務(wù)器,在空閑服務(wù)器上加載相應(yīng)的函數(shù)鏡像,將函數(shù)鏡像啟動(dòng)為一個(gè)函數(shù)實(shí)例運(yùn)行來處理請求.
服務(wù)器無感知計(jì)算平臺(tái)使用函數(shù)鏡像存儲(chǔ)系統(tǒng)來保存函數(shù)鏡像.當(dāng)加載函數(shù)鏡像時(shí),服務(wù)器需要通過網(wǎng)絡(luò)從函數(shù)鏡像存儲(chǔ)系統(tǒng)將所需函數(shù)鏡像傳輸?shù)奖镜兀写罅康木W(wǎng)絡(luò)傳輸和存儲(chǔ)系統(tǒng)讀取開銷,本地函數(shù)運(yùn)行時(shí)也需要加載相關(guān)依賴庫和進(jìn)行初始化操作,加載時(shí)間長.從遠(yuǎn)程函數(shù)鏡像存儲(chǔ)系統(tǒng)加載和啟動(dòng)容器及函數(shù)運(yùn)行時(shí)的過程稱為冷啟動(dòng).為了優(yōu)化函數(shù)啟動(dòng)時(shí)間,服務(wù)器無感知計(jì)算平臺(tái)通常會(huì)在服務(wù)器本地對(duì)函數(shù)鏡像進(jìn)行緩存.當(dāng)所需函數(shù)鏡像在本地緩存時(shí),服務(wù)器可以直接啟動(dòng)該函數(shù)鏡像,而無需再從遠(yuǎn)程函數(shù)鏡像存儲(chǔ)系統(tǒng)加載.除此之外,容器和函數(shù)運(yùn)行時(shí)也可以預(yù)先啟動(dòng)等待執(zhí)行函數(shù)代碼,這個(gè)函數(shù)啟動(dòng)過程稱為熱啟動(dòng).
函數(shù)完成時(shí)間是從函數(shù)請求到來直到函數(shù)執(zhí)行結(jié)束所經(jīng)過的時(shí)間,其直接反映函數(shù)應(yīng)用的性能,是衡量服務(wù)器無感知計(jì)算平臺(tái)的重要指標(biāo).影響函數(shù)完成時(shí)間的因素主要包括排隊(duì)時(shí)間、啟動(dòng)時(shí)間和執(zhí)行時(shí)間3 個(gè)方面.函數(shù)排隊(duì)時(shí)間指函數(shù)請求在調(diào)度器隊(duì)列中等待被調(diào)度的時(shí)間.如果函數(shù)服務(wù)器本地沒有緩存函數(shù)鏡像,則需要通過冷啟動(dòng)從遠(yuǎn)程函數(shù)鏡像存儲(chǔ)系統(tǒng)加載并啟動(dòng)函數(shù)鏡像和函數(shù)運(yùn)行時(shí),產(chǎn)生額外的冷啟動(dòng)開銷.函數(shù)執(zhí)行時(shí)間指函數(shù)鏡像加載和啟動(dòng)后,函數(shù)實(shí)例運(yùn)行處理函數(shù)請求的時(shí)間.
在服務(wù)器無感知計(jì)算場景下,對(duì)函數(shù)請求進(jìn)行調(diào)度來優(yōu)化函數(shù)完成時(shí)間是一項(xiàng)挑戰(zhàn),其主要面臨問題規(guī)模大和動(dòng)態(tài)性強(qiáng)2 個(gè)難點(diǎn).
1)問題規(guī)模大.服務(wù)器無感知計(jì)算平臺(tái)以函數(shù)為粒度進(jìn)行調(diào)度,需要在短時(shí)間內(nèi)調(diào)度大量并發(fā)的函數(shù)來執(zhí)行處理函數(shù)請求.這要求調(diào)度器有很好的可擴(kuò)展性,限制了調(diào)度器為每個(gè)函數(shù)維護(hù)過多的調(diào)度信息.
2)動(dòng)態(tài)性強(qiáng).來自用戶的函數(shù)請求動(dòng)態(tài)性強(qiáng),不同函數(shù)執(zhí)行時(shí)間、資源需求等時(shí)空特征差異較大,并且在調(diào)度時(shí)無法知道未來函數(shù)請求精確的任務(wù)時(shí)空特征,不能基于所有信息直接做約束求解.
現(xiàn)有服務(wù)器無感知計(jì)算相關(guān)工作使用先來先服務(wù)(first come first serve,F(xiàn)CFS)算法作為函數(shù)調(diào)度算法[2-4].當(dāng)隊(duì)頭請求的函數(shù)執(zhí)行時(shí)間很長,或者本地沒有該函數(shù)鏡像的緩存,冷啟動(dòng)時(shí)間很長時(shí),會(huì)導(dǎo)致隊(duì)頭阻塞(head-of-line blocking),排在隊(duì)列后面的請求需要等待很久才能被執(zhí)行,使得整個(gè)系統(tǒng)的平均函數(shù)完成時(shí)間變長.最短任務(wù)優(yōu)先(shortest job first,SJF)策略是一種經(jīng)典的解決隊(duì)頭阻塞問題的策略.然而,在服務(wù)器無感知計(jì)算場景下,經(jīng)典的最短任務(wù)優(yōu)先策略不能完全解決隊(duì)頭阻塞問題,因?yàn)榕旁陉?duì)頭的請求可能因?yàn)槔鋯?dòng)造成較長的完成時(shí)間,影響隊(duì)列后面請求的執(zhí)行,仍舊造成隊(duì)頭阻塞.除此之外,最短任務(wù)優(yōu)先策略等經(jīng)典算法也沒有考慮不同函數(shù)在資源消耗方面的空間特征,這導(dǎo)致資源消耗較大的函數(shù)任務(wù)可能阻礙后續(xù)多個(gè)資源消耗較少的任務(wù)并發(fā)執(zhí)行,進(jìn)而加劇隊(duì)頭阻塞.
目前有一些工作通過設(shè)計(jì)函數(shù)鏡像緩存策略降低函數(shù)冷啟動(dòng)率[3-6].AWS 和Azure 等商用平臺(tái)以及OpenWhisk 等開源平臺(tái)使用固定函數(shù)鏡像緩存策略.該策略在函數(shù)執(zhí)行完成后,將運(yùn)行時(shí)環(huán)境保存一個(gè)固定時(shí)間長度(例如10 min).一些工作對(duì)緩存策略進(jìn)行了優(yōu)化,比如利用貪心對(duì)偶大小頻率(greedy-dual size frequency,GDSF)緩存算法等.這些工作側(cè)重于設(shè)計(jì)更好的緩存策略來降低冷啟動(dòng)概率,但沒有將冷啟動(dòng)與調(diào)度進(jìn)行綜合考慮.這些工作在調(diào)度上使用基礎(chǔ)的FCFS 調(diào)度策略,即使通過緩存策略降低了冷啟動(dòng)概率,還是會(huì)遇到由于調(diào)度順序不佳造成的隊(duì)頭阻塞問題,影響整個(gè)系統(tǒng)的平均函數(shù)完成時(shí)間.
為此,本文研究了服務(wù)器無感知計(jì)算場景下的函數(shù)調(diào)度問題,提出了針對(duì)服務(wù)器無感知計(jì)算的函數(shù)調(diào)度方案,主要貢獻(xiàn)有3 個(gè)方面:
1)分析了服務(wù)器無感知計(jì)算場景下的函數(shù)調(diào)度問題,并定位了3 個(gè)影響函數(shù)完成時(shí)間的因素,分別是排隊(duì)時(shí)間、啟動(dòng)時(shí)間和執(zhí)行時(shí)間.基于該分析,提出了數(shù)學(xué)模型對(duì)服務(wù)器無感知計(jì)算場景下函數(shù)調(diào)度問題進(jìn)行形式化建模,為函數(shù)調(diào)度問題提供優(yōu)化目標(biāo).
2)設(shè)計(jì)了基于函數(shù)時(shí)空特征的服務(wù)器無感知計(jì)算調(diào)度算法FuncSched,綜合考慮時(shí)間和空間2 個(gè)維度的特征.在時(shí)間維度上,利用時(shí)間分析器評(píng)估函數(shù)執(zhí)行時(shí)間,并利用預(yù)熱的函數(shù)鏡像的狀態(tài)和函數(shù)請求對(duì)應(yīng)的位置預(yù)測函數(shù)啟動(dòng)時(shí)間;在空間維度上,考慮函數(shù)運(yùn)行時(shí)的資源占用量.該策略根據(jù)時(shí)間和空間維度的特征計(jì)算函數(shù)請求優(yōu)先級(jí),基于優(yōu)先級(jí)進(jìn)行調(diào)度,并根據(jù)運(yùn)行時(shí)狀態(tài)對(duì)優(yōu)先級(jí)進(jìn)行動(dòng)態(tài)更新.
3)針對(duì)服務(wù)器無感知計(jì)算場景下函數(shù)調(diào)度問題,為了驗(yàn)證本文所提調(diào)度算法的有效性,實(shí)現(xiàn)了原型系統(tǒng),并使用了真實(shí)世界服務(wù)器無感知計(jì)算負(fù)載數(shù)據(jù)集進(jìn)行實(shí)驗(yàn).實(shí)驗(yàn)結(jié)果表明所提調(diào)度算法可以有效降低平均函數(shù)完成時(shí)間,并對(duì)性能提升原因進(jìn)行了分析.實(shí)驗(yàn)還評(píng)估了所提調(diào)度算法與不同緩存策略的兼容性,表明所提調(diào)度算法在多種緩存策略下都能有效降低平均函數(shù)完成時(shí)間,從而驗(yàn)證了本文所提調(diào)度算法的有效性.
1 相關(guān)工作
1.1 服務(wù)器無感知計(jì)算函數(shù)性能優(yōu)化
函數(shù)性能優(yōu)化是當(dāng)前服務(wù)器無感知計(jì)算領(lǐng)域的重要研究方向.眾多工作基于檢查點(diǎn)/恢復(fù)、自模版啟動(dòng)、運(yùn)行時(shí)環(huán)境預(yù)啟動(dòng)等多種技術(shù)縮減冷啟動(dòng)開銷,減少用戶請求的響應(yīng)延遲.接下來,我們分類概述已有相關(guān)工作,并將其與本文工作進(jìn)行比較分析.
當(dāng)用戶請求對(duì)應(yīng)的鏡像文件未存儲(chǔ)在本地時(shí),云平臺(tái)需要首先從遠(yuǎn)端下載鏡像文件,而后再啟動(dòng)運(yùn)行時(shí)環(huán)境,這一過程的耗時(shí)可能長達(dá)數(shù)秒.為了優(yōu)化鏡像文件的下載速度,文獻(xiàn)[7]基于共享網(wǎng)絡(luò)文件系統(tǒng)對(duì)鏡像文件進(jìn)行存儲(chǔ)和拉取,并基于延遲加載加速容器啟動(dòng).文獻(xiàn)[8]和文獻(xiàn)[9]通過分布式文件系統(tǒng)存儲(chǔ)鏡像文件以提升讀取效率.文獻(xiàn)[10]使用P2P 結(jié)構(gòu)加速容器鏡像文件的分發(fā).文獻(xiàn)[11]基于樹狀P2P 網(wǎng)絡(luò)加速虛擬機(jī)鏡像文件的傳輸.文獻(xiàn)[12]將虛擬機(jī)組織為動(dòng)態(tài)變化的樹結(jié)構(gòu)以完成虛擬機(jī)鏡像文件的快速分發(fā),并采用樹平衡算法在大型服務(wù)器無感知計(jì)算平臺(tái)的高可變環(huán)境下保證樹結(jié)構(gòu)穩(wěn)定.
部分工作將已就緒的運(yùn)行時(shí)環(huán)境打包為快照文件并存儲(chǔ)起來,在后續(xù)的用戶請求到來時(shí)直接復(fù)現(xiàn),從而縮減運(yùn)行時(shí)環(huán)境的啟動(dòng)時(shí)間.文獻(xiàn)[13]將用戶函數(shù)代碼、語言解釋器、依賴庫在內(nèi)的運(yùn)行時(shí)狀態(tài)打包為Unikernels[14]快照文件以優(yōu)化其后續(xù)啟動(dòng)速度.文獻(xiàn)[15]通過多個(gè)容器間的狀態(tài)共享支持高并發(fā)的負(fù)載場景.文獻(xiàn)[16]基于類似思路實(shí)現(xiàn)了虛擬機(jī)間的即時(shí)編譯(just-in-time compilation,JIT)文件共享.文獻(xiàn)[17]同時(shí)對(duì)快照文件中的應(yīng)用狀態(tài)(如內(nèi)存使用)及系統(tǒng)狀態(tài)(如文件打開情況)進(jìn)行按需恢復(fù)與延遲恢復(fù),進(jìn)一步加速其啟動(dòng)速度.
部分工作為使用相似運(yùn)行時(shí)環(huán)境的一類函數(shù)創(chuàng)建普適的運(yùn)行時(shí)環(huán)境模板,從而用戶函數(shù)可以自模版快速啟動(dòng).文獻(xiàn)[5]借鑒了安卓系統(tǒng)中的Zygotes[18]機(jī)制,將常用的依賴庫安裝在本地,并以只讀方式掛載到容器當(dāng)中以跳過Python 依賴庫的安裝與加載過程.文獻(xiàn)[19]利用調(diào)用頻率較低的空閑容器創(chuàng)建Zygotes 容器.在Zygotes 容器中安裝所有用戶函數(shù)的依賴包,從而后續(xù)函數(shù)請求在函數(shù)執(zhí)行過程中無需再進(jìn)行依賴包加載.
在服務(wù)器無感知計(jì)算中,函數(shù)執(zhí)行的時(shí)間通常只有數(shù)秒[3],而函數(shù)的冷啟動(dòng)時(shí)間包括函數(shù)鏡像拉取開銷和函數(shù)運(yùn)行所依賴環(huán)境的啟動(dòng)開銷,往往也需要幾秒的時(shí)間[3],因此優(yōu)化函數(shù)的冷啟動(dòng)是服務(wù)器無感知計(jì)算系統(tǒng)的重要目標(biāo).通過提前啟動(dòng)運(yùn)行時(shí)環(huán)境可以避免冷啟動(dòng)的發(fā)生.主流商用及開源服務(wù)器無感知平臺(tái)[2,20-22]通常在函數(shù)執(zhí)行結(jié)束之后將運(yùn)行時(shí)環(huán)境在集群中保留固定時(shí)長(例如10 min),由此調(diào)用頻繁的用戶函數(shù)能夠?qū)崿F(xiàn)穩(wěn)定熱啟動(dòng),這類策略規(guī)則簡單,但帶來了顯著的資源浪費(fèi).
部分工作基于調(diào)用預(yù)測針對(duì)性地預(yù)啟動(dòng)運(yùn)行時(shí)環(huán)境.文獻(xiàn)[3]從周期性角度對(duì)函數(shù)進(jìn)行分類,對(duì)于周期性較差的函數(shù)使用ARIMA[23]等標(biāo)準(zhǔn)時(shí)間序列預(yù)測算法,而對(duì)于具有明顯周期性的函數(shù)則使用基于直方頻率分布的啟發(fā)式規(guī)則進(jìn)行負(fù)載預(yù)測,在函數(shù)最可能被調(diào)用的時(shí)段內(nèi)維持預(yù)啟動(dòng)環(huán)境.文獻(xiàn)[6]基于傅里葉變化對(duì)函數(shù)未來并發(fā)數(shù)進(jìn)行預(yù)測.在此基礎(chǔ)上,根據(jù)預(yù)測結(jié)果調(diào)整運(yùn)行時(shí)環(huán)境在集群內(nèi)的部署位置,將有更大可能被調(diào)用的運(yùn)行時(shí)環(huán)境部署在高性能服務(wù)器上,調(diào)用概率較低的則部署在低性能服務(wù)器上,從而降低維持預(yù)啟動(dòng)環(huán)境的花費(fèi).文獻(xiàn)[24]設(shè)計(jì)了長短直方預(yù)測(long-short term histogram,LSTH)算法,綜合分析函數(shù)在天和小時(shí)粒度下的周期性特征,以適應(yīng)機(jī)器學(xué)習(xí)任務(wù)以天為粒度的周期性特征以及以小時(shí)/分鐘為粒度的偶然性波動(dòng).文獻(xiàn)[25]基于長短期記憶(long short-term memory,LSTM)網(wǎng)絡(luò)對(duì)函數(shù)調(diào)用歷史進(jìn)行特征抓取,在此基礎(chǔ)上基于貝葉斯優(yōu)化對(duì)預(yù)啟動(dòng)資源池進(jìn)行動(dòng)態(tài)調(diào)整.
在負(fù)載預(yù)測之外,部分工作優(yōu)化固定內(nèi)存大小下的實(shí)例集合以降低函數(shù)冷啟動(dòng)率.部分工作借鑒緩存策略管理預(yù)啟動(dòng)環(huán)境,將運(yùn)行時(shí)環(huán)境視為緩存對(duì)象,將冷啟動(dòng)與熱啟動(dòng)分別視為緩存未命中和緩存命中,從而將緩存策略應(yīng)用于服務(wù)器無感知計(jì)算領(lǐng)域.文獻(xiàn)[5]使用最近最少使用(least recently used,LRU)策略管理運(yùn)行時(shí)環(huán)境的緩存.文獻(xiàn)[4]則借鑒貪心對(duì)偶大小頻率(greedy-dual size frequency,GDSF)緩存算法[26],綜合考慮運(yùn)行時(shí)環(huán)境的調(diào)用頻率、大小、用戶函數(shù)冷啟動(dòng)時(shí)間、最近調(diào)用間隔等因素,在內(nèi)存中保留優(yōu)先級(jí)最高的運(yùn)行時(shí)環(huán)境.此外,部分工作致力于縮減單個(gè)運(yùn)行時(shí)環(huán)境的內(nèi)存占用,從而增加固定內(nèi)存中可容納的運(yùn)行時(shí)環(huán)境實(shí)例個(gè)數(shù).例如,文獻(xiàn)[27]針對(duì)服務(wù)器無感知場景縮減USB 等虛擬機(jī)構(gòu)件,從而將內(nèi)存開銷壓縮至QEMU 的數(shù)十分之一;文獻(xiàn)[28]同樣通過優(yōu)化虛擬機(jī)開銷將單個(gè)安全容器的內(nèi)存占用壓縮至數(shù)百M(fèi)B.
雖然已有工作從多個(gè)角度優(yōu)化了服務(wù)器無感知計(jì)算場景下的函數(shù)完成時(shí)間,然而由于本節(jié)工作均未意識(shí)到調(diào)度算法對(duì)函數(shù)完成時(shí)間的影響,從而仍舊無法避免函數(shù)請求在高負(fù)載場景下的隊(duì)頭阻塞問題.與之相對(duì)的,本文提出了基于函數(shù)時(shí)空特征的服務(wù)器無感知計(jì)算函數(shù)調(diào)度算法FuncSched,降低函數(shù)完成時(shí)間.
1.2 任務(wù)調(diào)度
任務(wù)調(diào)度器通過調(diào)整任務(wù)執(zhí)行順序來優(yōu)化任務(wù)完成時(shí)間.SJF 算法[29]能夠有效避免長任務(wù)對(duì)后續(xù)多個(gè)短任務(wù)的長時(shí)間阻塞.最短剩余時(shí)間(shortest remaining time first,SRTF)優(yōu)先算法[30]允許新到來的短任務(wù)搶占正在運(yùn)行的長任務(wù),以實(shí)現(xiàn)更優(yōu)的任務(wù)完成時(shí)間.Gittins 索引策略[31]能夠在用戶任務(wù)耗時(shí)不定,但符合特定分布時(shí)降低平均任務(wù)完成時(shí)間,而多級(jí)反饋隊(duì)列(multi-level feedback queue,MLFQ)算法[32]以及最小獲得服務(wù)者優(yōu)先(least attained service,LAS)算法[33]等啟發(fā)式算法則規(guī)避了文獻(xiàn)[29-31]所述算法必須對(duì)任務(wù)運(yùn)行時(shí)間具有先驗(yàn)知識(shí)的弊端,從而適用于機(jī)器學(xué)習(xí)等難以估計(jì)任務(wù)運(yùn)行時(shí)間的場景[34].此外,文獻(xiàn)[35]通過頻繁搶占長任務(wù)保證短任務(wù)的優(yōu)先執(zhí)行,從而優(yōu)化尾部延遲.
部分工作通過任務(wù)分類與資源預(yù)留避免任務(wù)阻塞,優(yōu)化任務(wù)完成時(shí)間.例如文獻(xiàn)[36]將用戶請求劃分為長任務(wù)和短任務(wù),并專門預(yù)留部分資源處理短任務(wù),以避免短任務(wù)阻塞.另一些工作則通過提高調(diào)度效率縮減任務(wù)完成時(shí)間,例如文獻(xiàn)[37]和文獻(xiàn)[38]將長任務(wù)和短任務(wù)分別部署在集中式和分布式調(diào)度器上,由此避免巨量短期任務(wù)在調(diào)度過程中被阻塞.文獻(xiàn)[39]和文獻(xiàn)[40]則采用了工作竊取策略,允許空閑工作線程“竊取”高負(fù)載工作線程的任務(wù)隊(duì)列,從而在分布式調(diào)度場景中實(shí)現(xiàn)良好的負(fù)載均衡,避免不必要的任務(wù)阻塞.其他工作則同時(shí)考慮到不同任務(wù)的延遲要求,例如BVT 算法[41]計(jì)算任務(wù)的排隊(duì)時(shí)間與目標(biāo)延遲時(shí)間的比值,并優(yōu)先調(diào)度比值最大的任務(wù).而文獻(xiàn)[42]則允許用戶通過聲明式語言為高優(yōu)先級(jí)任務(wù)預(yù)留部分計(jì)算資源,從而避免高優(yōu)先級(jí)任務(wù)被低優(yōu)先級(jí)任務(wù)阻塞.
文獻(xiàn)[29-41]所述的工作沒有考慮服務(wù)器無感知計(jì)算場景的時(shí)空特點(diǎn),時(shí)間上不同的函數(shù)請求的執(zhí)行時(shí)間差異很大,最高可差8 個(gè)數(shù)量級(jí)[3];空間上不同的函數(shù)請求的資源占用差異也很大[3].這些工作無法直接應(yīng)用于服務(wù)器無感知計(jì)算場景的函數(shù)調(diào)度.本文根據(jù)函數(shù)時(shí)空特性,設(shè)計(jì)了面向服務(wù)器無感知計(jì)算場景的調(diào)度算法,在保證調(diào)度器高效運(yùn)行的前提下優(yōu)化函數(shù)完成時(shí)間.
2 問題定義和建模
2.1 問題分析
本文旨在研究面向服務(wù)器無感知計(jì)算場景的函數(shù)調(diào)度算法.服務(wù)器無感知計(jì)算平臺(tái)提供基于函數(shù)的高層次抽象,使得用戶無需顯式配置和管理云資源,只需要編寫和提交應(yīng)用邏輯相關(guān)的函數(shù).服務(wù)器無感知計(jì)算平臺(tái)負(fù)責(zé)調(diào)度函數(shù)、分配資源和執(zhí)行函數(shù),圖1 展示了服務(wù)器無感知計(jì)算平臺(tái)的框架和工作流程.在這一框架中,控制平面的調(diào)度器需要結(jié)合函數(shù)時(shí)間分析器和資源管理器決定具體的函數(shù)執(zhí)行順序.在這種執(zhí)行模式下,調(diào)度算法和函數(shù)鏡像緩存策略[4,6]會(huì)極大影響函數(shù)執(zhí)行性能.因此,本文研究的問題是在服務(wù)器無感知計(jì)算場景下的函數(shù)調(diào)度,以優(yōu)化函數(shù)完成時(shí)間.
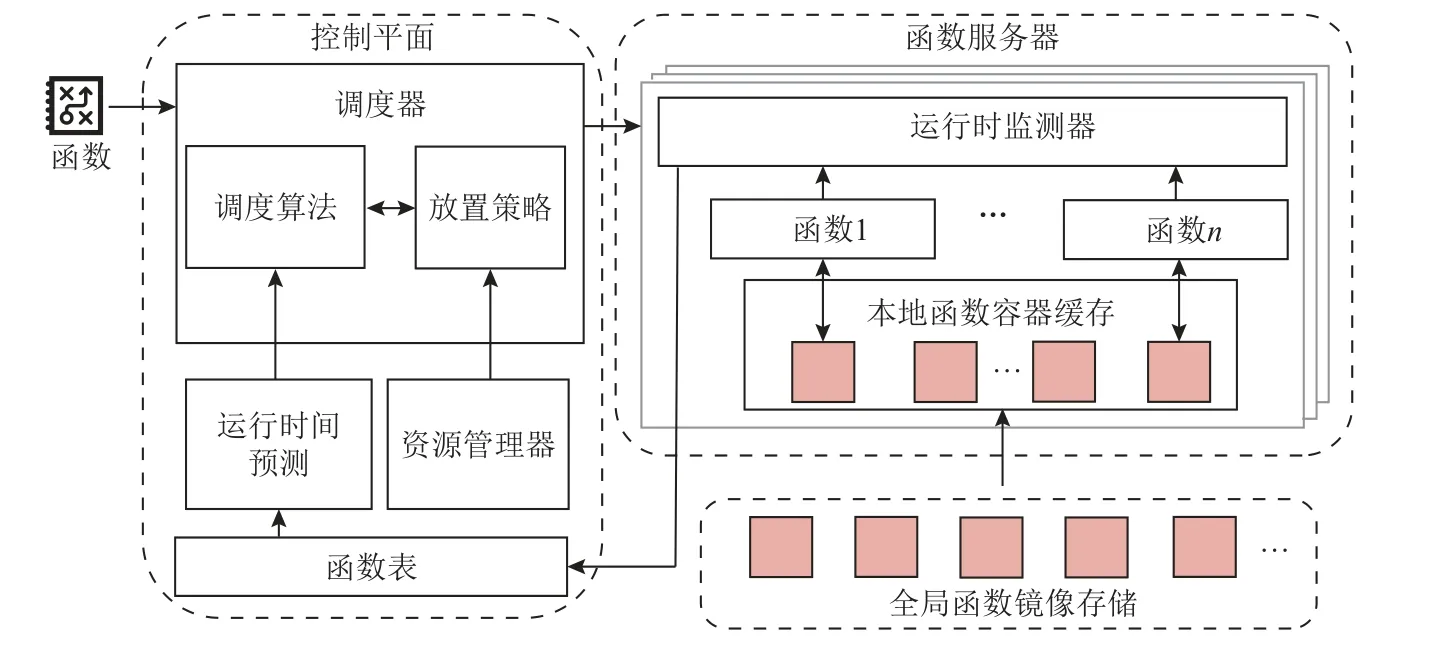
Fig.1 Architecture overview圖1 架構(gòu)概覽
2.2 問題建模
1)系統(tǒng)建模.我們將服務(wù)器無感知計(jì)算平臺(tái)的集群資源建模成一個(gè)大小為m×n的矩陣M.集群包含m個(gè)函數(shù)服務(wù)器,計(jì)算負(fù)載包含n個(gè)函數(shù).M[i,j]=1表示第i個(gè)函數(shù)服務(wù)器上緩存了第j個(gè)函數(shù)對(duì)應(yīng)的鏡像;E(j)表示函數(shù)j的執(zhí)行時(shí)間;D(j) 表示函數(shù)j對(duì)應(yīng)的冷啟動(dòng)時(shí)間.
2)任務(wù)建模.總共有l(wèi)個(gè)函數(shù)請求,函數(shù)請求的集合是F,F(xiàn)[k]表示第k個(gè)函數(shù)請求對(duì)應(yīng)的函數(shù)編號(hào),F(xiàn)[k]a表示第k個(gè)函數(shù)請求的到達(dá)時(shí)間,F(xiàn)[k]s表示第k個(gè)函數(shù)請求被系統(tǒng)調(diào)度開始執(zhí)行的時(shí)間,F(xiàn)[k]e表示第k個(gè)函數(shù)請求被執(zhí)行完成的時(shí)間,O為順序數(shù)組[1,2,…,l]的置換數(shù)組.本文中主要符號(hào)及含義如表1所示.
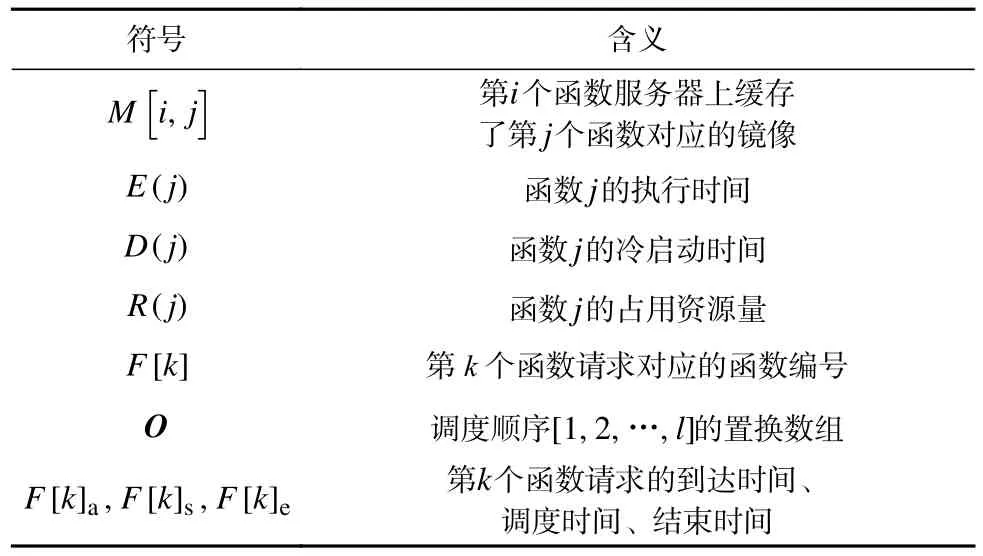
Table 1 Symbol Table表1 符號(hào)表
基于上述問題建模,本文的研究問題包含如何設(shè)計(jì)函數(shù)調(diào)度算法和決定函數(shù)的執(zhí)行順序,以優(yōu)化平均函數(shù)完成時(shí)間.
2.3 問題定義
對(duì)于第k個(gè)函數(shù)請求,如果要調(diào)度該函數(shù)到函數(shù)服務(wù)器i,其完成時(shí)間為F[k]e-F[k]a=E(F[k])+D(F[k])×M[i,F[k]]+F[k]s-F[k]a,由執(zhí)行時(shí)間、冷啟動(dòng)時(shí)間和排隊(duì)時(shí)間組成.要優(yōu)化的目標(biāo)是所有函數(shù)請求的平均完成時(shí)間,那么目標(biāo)函數(shù)歸約為:
式(1)中,不確定的變量有函數(shù)的調(diào)度時(shí)間F[k]s和函數(shù)的放置位置i.其中M[i,F[k]]表示函數(shù)是否是熱啟動(dòng),如果是熱啟動(dòng)則不需要從全局函數(shù)鏡像存儲(chǔ)拉取鏡像,對(duì)應(yīng)的函數(shù)冷啟動(dòng)開銷為0.
首先分析函數(shù)請求的執(zhí)行順序O所帶來的約束條件.對(duì)于k=O[u],即順序中的第u個(gè)函數(shù)請求,對(duì)應(yīng)函數(shù)請求集合中的第k個(gè)元素.排在其順序之前的所有函數(shù)請求(O[1],O[2],…,O[u-1])都應(yīng)該比O[u]有更高的優(yōu)先級(jí),即需要滿足約束條件:
即O[u]的調(diào)度時(shí)間一定不早于排在其前面的函數(shù)請求的調(diào)度時(shí)間.其次是集群資源的限制,令時(shí)刻t函數(shù)服務(wù)器i的空閑資源量為Vi(t),函數(shù)請求O[u]可以在函數(shù)服務(wù)器i上執(zhí)行的約束條件是:
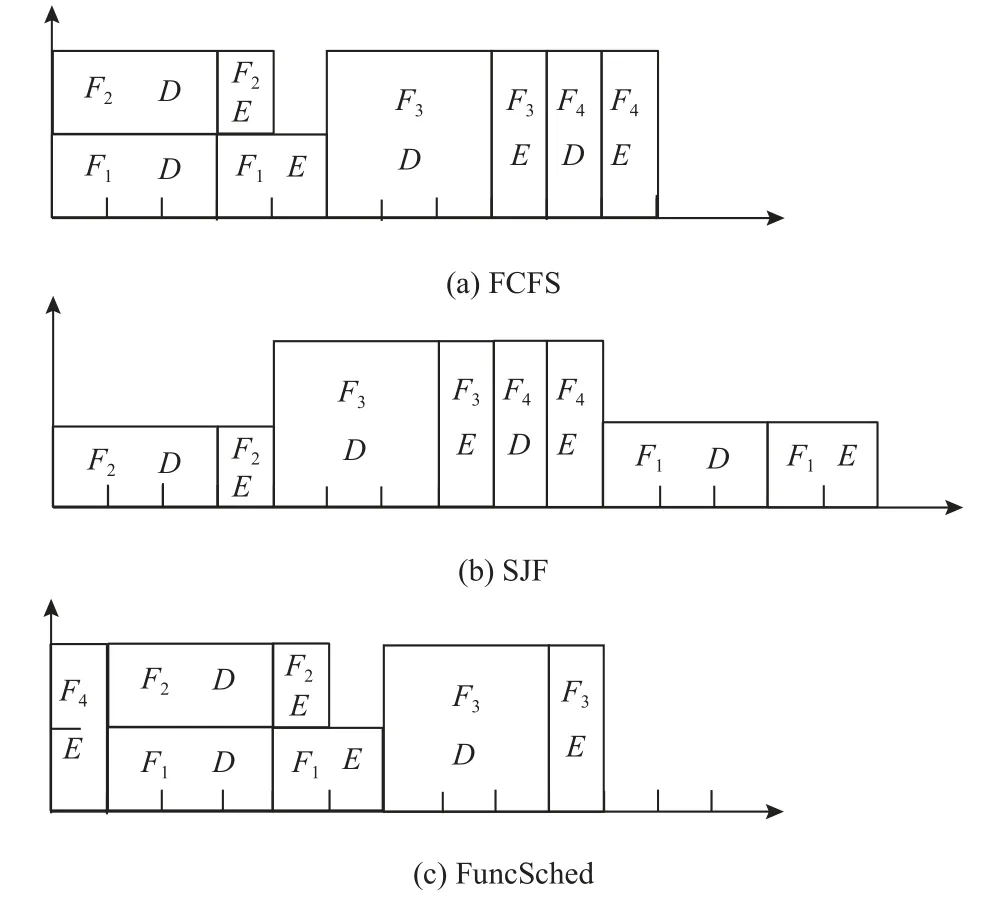
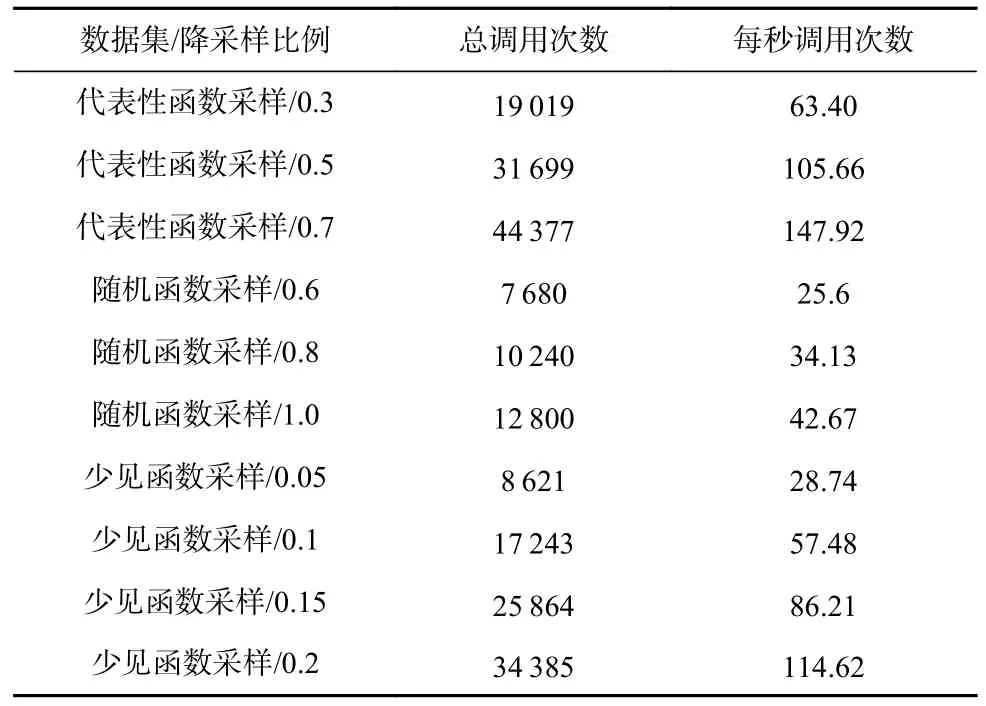
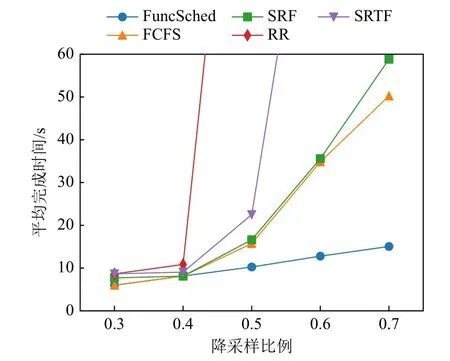
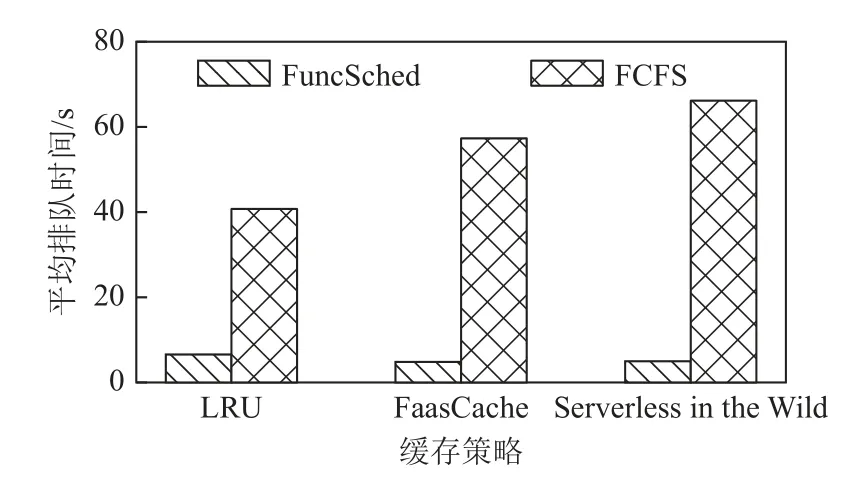
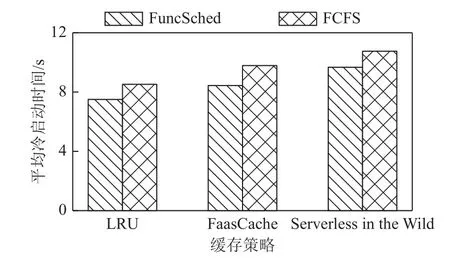
即要求目標(biāo)放置服務(wù)器的空閑資源數(shù)量足夠容納即將要調(diào)度的函數(shù)請求,假設(shè)數(shù)組A表示函數(shù)請求放置的服務(wù)器標(biāo)號(hào),那么在決定O[u]的放置策略時(shí),?q 綜上所述,該問題的數(shù)學(xué)模型為: 目標(biāo)函數(shù): 約束條件,即式(2)(3): 約束條件(2)保證了調(diào)度的優(yōu)先級(jí),約束條件(3)保證了有資源執(zhí)行對(duì)應(yīng)函數(shù). 在第2 節(jié)的問題建模指導(dǎo)下,本文分析了服務(wù)器無感知計(jì)算調(diào)度的挑戰(zhàn)和現(xiàn)有算法的局限性.基于問題建模和現(xiàn)有調(diào)度算法現(xiàn)狀,本節(jié)針對(duì)服務(wù)器無感知計(jì)算的特點(diǎn),提出了一個(gè)基于函數(shù)時(shí)空特征的服務(wù)器無感知計(jì)算函數(shù)調(diào)度算法FuncSched,在兼容現(xiàn)有其他服務(wù)器無感知計(jì)算優(yōu)化模塊的基礎(chǔ)上,實(shí)現(xiàn)更低的平均函數(shù)完成時(shí)間. 服務(wù)器無感知計(jì)算旨在讓用戶只需編寫跟實(shí)際業(yè)務(wù)邏輯相關(guān)的代碼,無需關(guān)心底層資源調(diào)度、機(jī)器配置、分布式執(zhí)行等復(fù)雜底層硬件集群細(xì)節(jié)和日常運(yùn)維難點(diǎn).這一計(jì)算編程模型雖然減輕了用戶開發(fā)負(fù)擔(dān)并降低了用戶運(yùn)維成本,但是也極大增加了服務(wù)器無感知計(jì)算調(diào)度的難度.具體來說,服務(wù)器無感知計(jì)算調(diào)度存在問題規(guī)模大和動(dòng)態(tài)性強(qiáng)2 個(gè)技術(shù)難點(diǎn). 首先,由于用戶編寫的服務(wù)器無感知計(jì)算框架代碼需要以函數(shù)粒度來進(jìn)行調(diào)度,服務(wù)器無感知計(jì)算調(diào)度器需要在短時(shí)間內(nèi)調(diào)度大量并發(fā)函數(shù)執(zhí)行[3].這要求服務(wù)器無感知計(jì)算調(diào)度算法要有很好的可擴(kuò)展性.此外,對(duì)于每個(gè)函數(shù)不能維護(hù)過多的信息,因?yàn)檫@會(huì)極大增加調(diào)度器的資源消耗和復(fù)雜度.第2 節(jié)針對(duì)函數(shù)調(diào)度優(yōu)化建模的約束求解問題難以在短時(shí)間內(nèi)解出,這是因?yàn)槠浣3龅募s束求解問題本身就已經(jīng)難于整數(shù)線性規(guī)劃問題,屬于NP 問題,不能在線性時(shí)間復(fù)雜度內(nèi)解出.而在約束求解問題中,變量O可能達(dá)上百乃至上千量級(jí).如此大規(guī)模的函數(shù)調(diào)度問題不能采用指數(shù)級(jí)的約束求解器來給出調(diào)度方案.許多函數(shù)執(zhí)行時(shí)間很短,指數(shù)級(jí)時(shí)間復(fù)雜度的約束求解器調(diào)度本身的時(shí)間消耗很可能遠(yuǎn)大于函數(shù)執(zhí)行時(shí)間本身,造成極大性能損耗. 其次,服務(wù)器無感知計(jì)算調(diào)度需要面對(duì)動(dòng)態(tài)性強(qiáng)的函數(shù)執(zhí)行請求.在第2 節(jié)的問題建模中,函數(shù)請求到達(dá)時(shí)間F[k]a很難在每次調(diào)度執(zhí)行時(shí)知道其全部信息.因此,服務(wù)器無感知計(jì)算調(diào)度也不能基于所有信息的情況直接做約束求解,進(jìn)而也不能達(dá)到最優(yōu)調(diào)度計(jì)劃.現(xiàn)有研究也表明函數(shù)請求到達(dá)規(guī)律很難用泊松分布、定時(shí)執(zhí)行等模型來完全擬合[3],因此也很難基于預(yù)測來得到較好的調(diào)度方案最優(yōu)近似解. 服務(wù)器無感知計(jì)算平臺(tái)中的函數(shù)鏡像緩存模塊也影響服務(wù)器無感知計(jì)算調(diào)度.函數(shù)鏡像緩存模塊有自己的存儲(chǔ)策略.在設(shè)計(jì)函數(shù)調(diào)度算法時(shí),需要考慮與函數(shù)鏡像緩存模塊的兼容,并通過優(yōu)化調(diào)度算法進(jìn)一步降低平均函數(shù)完成時(shí)間. 現(xiàn)有服務(wù)器無感知計(jì)算框架,例如OpenWhisk,Knative 等,通過預(yù)熱(prewarm)、延遲函數(shù)鏡像存活時(shí)間(keep-alive)等機(jī)制[2-3]優(yōu)化函數(shù)性能.最新的相關(guān)研究工作也從緩存策略等方面對(duì)服務(wù)器無感知計(jì)算進(jìn)行優(yōu)化提升[4-5].但這些工作都是優(yōu)化單一用戶函數(shù)應(yīng)用的執(zhí)行性能和資源分配.當(dāng)大量用戶函數(shù)請求同時(shí)被觸發(fā)時(shí),用戶函數(shù)間會(huì)產(chǎn)生資源競爭.如何在用戶函數(shù)調(diào)用請求間進(jìn)行資源調(diào)度,目前的實(shí)踐和最新研究都深度不夠. 具體來說,目前的服務(wù)器無感知計(jì)算框架,當(dāng)面對(duì)大量同時(shí)到達(dá)的用戶函數(shù)調(diào)用請求時(shí),采用的是FCFS 算法進(jìn)行調(diào)度,即 這樣的調(diào)度算法優(yōu)勢在于其調(diào)度算法執(zhí)行開銷較小,不會(huì)較大影響函數(shù)調(diào)用的端到端完成時(shí)間.另一方面,這一調(diào)度算法會(huì)產(chǎn)生隊(duì)頭阻塞.當(dāng)一個(gè)函數(shù)請求執(zhí)行時(shí)間較長時(shí),后繼的函數(shù)請求將經(jīng)受很長的等待時(shí)間,進(jìn)而造成函數(shù)性能下降. 針對(duì)3.1 節(jié)和3.2 節(jié)所述的問題和挑戰(zhàn),本文提出了一個(gè)面向服務(wù)器無感知計(jì)算場景的基于時(shí)空特征的函數(shù)調(diào)度算法FuncSched 以優(yōu)化函數(shù)完成時(shí)間,并且能兼容服務(wù)器無感知計(jì)算的函數(shù)鏡像緩存模塊.這一算法從經(jīng)典的SJF 算法泛化而來,但是Func-Sched 同時(shí)考慮到了函數(shù)任務(wù)的時(shí)間和空間2 個(gè)維度的特征. 3.3.1 函數(shù)時(shí)間特征估測 在時(shí)間維度上,本文利用了服務(wù)器無感知計(jì)算平臺(tái)中的用戶函數(shù)會(huì)被反復(fù)調(diào)用的特點(diǎn),提前利用時(shí)間分析器評(píng)估每個(gè)用戶函數(shù)需要執(zhí)行的時(shí)間E(j).服務(wù)器無感知計(jì)算調(diào)度器以這個(gè)時(shí)間指標(biāo)指導(dǎo)函數(shù)調(diào)度.傳統(tǒng)的SJF 算法以任務(wù)執(zhí)行時(shí)間E(j)為標(biāo)準(zhǔn),優(yōu)先調(diào)度E(j)最小的任務(wù)執(zhí)行,從而避免了先到達(dá)的任務(wù)因?yàn)閳?zhí)行時(shí)間較長阻塞后續(xù)任務(wù)的問題.與之不同的是,F(xiàn)uncSched 同時(shí)綜合考慮了函數(shù)執(zhí)行時(shí)間和函數(shù)在服務(wù)器無感知計(jì)算平臺(tái)的啟動(dòng)時(shí)間.設(shè)計(jì)背景在于,細(xì)粒度函數(shù)的執(zhí)行時(shí)間通常較短,而函數(shù)的啟動(dòng)時(shí)間反而會(huì)對(duì)函數(shù)任務(wù)最終的端到端完成時(shí)間產(chǎn)生較大影響.當(dāng)函數(shù)處于熱啟動(dòng)狀態(tài)時(shí),函數(shù)可以立刻執(zhí)行;當(dāng)函數(shù)處于冷啟動(dòng)狀態(tài)時(shí),即使函數(shù)執(zhí)行時(shí)間較短,較長的函數(shù)啟動(dòng)時(shí)間也會(huì)阻塞后繼函數(shù). 函數(shù)啟動(dòng)時(shí)間,其不僅與函數(shù)自身代碼邏輯緊密相關(guān),也受服務(wù)器無感知計(jì)算框架的函數(shù)鏡像緩存模塊的影響.函數(shù)鏡像緩存模塊的決策具有動(dòng)態(tài)性,其會(huì)基于現(xiàn)有負(fù)載、用戶要求等在運(yùn)行時(shí)做出決策,從而影響函數(shù)啟動(dòng)時(shí)間.對(duì)于這一動(dòng)態(tài)變化的函數(shù)運(yùn)行開銷,一個(gè)設(shè)計(jì)背景是,函數(shù)鏡像緩存模塊只會(huì)影響預(yù)熱的函數(shù)鏡像的狀態(tài)和函數(shù)請求對(duì)應(yīng)的位置F[k].因?yàn)榉?wù)器無感知調(diào)度平臺(tái)中的函數(shù)鏡像緩存模塊對(duì)調(diào)度器白盒可見,因此調(diào)度器可以提前預(yù)測后繼函數(shù)請求需要經(jīng)歷的啟動(dòng)時(shí)間.具體來說,F(xiàn)uncSched 會(huì)維護(hù)一個(gè)變量W(j),表示函數(shù)j可以被熱啟動(dòng)的函數(shù)請求數(shù)量.當(dāng)函數(shù)j的鏡像被預(yù)熱或有函數(shù)j請求結(jié)束時(shí),調(diào)度器即可立即將W(j)加1,表示新增一個(gè)可以熱啟動(dòng)的函數(shù)請求容量.當(dāng)函數(shù)j的鏡像被驅(qū)逐或有函數(shù)j請求開始執(zhí)行時(shí),調(diào)度器立即將W(j)減1,表示減少一個(gè)可以熱啟動(dòng)的函數(shù)請求容量.通過維護(hù)變量W(j),F(xiàn)uncSched 可以實(shí)時(shí)感知函數(shù)鏡像緩存模塊對(duì)函數(shù)啟動(dòng)時(shí)間的影響,進(jìn)而增強(qiáng)對(duì)函數(shù)整體運(yùn)行時(shí)間的把控.除此之外,利用W(j)進(jìn)行函數(shù)調(diào)度的過程還將函數(shù)啟動(dòng)時(shí)間的判定從每輪函數(shù)調(diào)度邏輯的關(guān)鍵路徑上移除,降低了大規(guī)模調(diào)度細(xì)粒度函數(shù)的開銷.并且,這一數(shù)據(jù)結(jié)構(gòu)所需存儲(chǔ)空間小,不會(huì)讓調(diào)度器產(chǎn)生額外的存儲(chǔ)壓力. 3.3.2 函數(shù)空間特征估測 在空間維度上,F(xiàn)uncSched 調(diào)度時(shí)考慮了每個(gè)函數(shù)的運(yùn)行時(shí)資源占用情況.傳統(tǒng)的調(diào)度算法,無論是FCFS 算法或者SJF 算法,其都是基于時(shí)間維度的調(diào)度算法.但是在服務(wù)器無感知計(jì)算環(huán)境中,函數(shù)資源占用差異較大,如果單純按照函數(shù)運(yùn)行時(shí)間進(jìn)行任務(wù)調(diào)度,仍然很難達(dá)到較低平均函數(shù)完成時(shí)間.例如,一個(gè)資源消耗量非常大的函數(shù)請求,即使其完成時(shí)間很短,也可能會(huì)導(dǎo)致很多可以并行執(zhí)行且資源消耗很少的函數(shù)請求被阻塞,進(jìn)而產(chǎn)生更長的平均函數(shù)完成時(shí)間.因此,函數(shù)的資源消耗情況也是函數(shù)調(diào)度需要考慮的關(guān)鍵因素.在資源消耗的度量上,F(xiàn)uncSched 選擇采用函數(shù)占用內(nèi)存作為表示函數(shù)資源消耗的中間量,其原因有2 個(gè)方面:這一方面是因?yàn)橛脩粼谔峤缓瘮?shù)給服務(wù)器無感知計(jì)算平臺(tái)時(shí),會(huì)指定用戶函數(shù)需要的內(nèi)存大小,該信息調(diào)度器比較容易被獲取;另一方面,根據(jù)商用服務(wù)器無感知計(jì)算平臺(tái)AWS Lambda 的測算[27],內(nèi)存成本大約占服務(wù)器成本的40%,是服務(wù)器中最重要的資源之一. 3.3.3 FuncSched 調(diào)度算法整體流程 通過綜合考慮每個(gè)函數(shù)的時(shí)間特征和空間特征,本文提出了一個(gè)新型的函數(shù)請求優(yōu)先級(jí)指標(biāo)P(k).對(duì)于使用函數(shù)容器j的函數(shù)請求k,P(k)計(jì)算為 基于這一優(yōu)先級(jí)P[k],F(xiàn)uncSched 將優(yōu)先調(diào)度P[k]最小的函數(shù)請求. 對(duì)于一個(gè)函數(shù)而言,它的整個(gè)生命周期如圖2所示.首先在函數(shù)鏡像提交時(shí),F(xiàn)uncSched 的性能分析器會(huì)基于提交的函數(shù)鏡像測算出該函數(shù)的冷啟動(dòng)時(shí)間D(j)、任務(wù)執(zhí)行時(shí)間E(j)以及函數(shù)資源消耗量R(j),并將這些數(shù)據(jù)保存在函數(shù)性能數(shù)據(jù)存儲(chǔ)庫中.當(dāng)該函數(shù)的函數(shù)請求到達(dá)時(shí),調(diào)度器會(huì)從函數(shù)性能數(shù)據(jù)存儲(chǔ)庫中將該函數(shù)的時(shí)間特征、空間特征取出,并結(jié)合函數(shù)鏡像緩存模塊提供的空閑可用的函數(shù)容器數(shù)W(j)來綜合算出該請求的優(yōu)先級(jí)P(k).當(dāng)該函數(shù)優(yōu)先級(jí)最高時(shí),調(diào)度器會(huì)觸發(fā)函數(shù)服務(wù)器執(zhí)行該函數(shù).根據(jù)函數(shù)鏡像實(shí)時(shí)情況,調(diào)度器會(huì)相應(yīng)更新W(j)的值,并更新其待執(zhí)行的函數(shù)請求的優(yōu)先級(jí)P(k).最后,這些請求將根據(jù)優(yōu)先級(jí)重新排序,具體算法如算法1 所示. 算法1.基于時(shí)間感知的函數(shù)調(diào)度算法. 3.3.4 調(diào)度示例 圖3 展示了一個(gè)不同調(diào)度算法的示例.該示例中,一個(gè)包含2 個(gè)單位內(nèi)存的函數(shù)服務(wù)器需要服務(wù)4 個(gè)依次到來的函數(shù)請求F1,F(xiàn)2,F(xiàn)3,F(xiàn)4,其中只有F4有已經(jīng)預(yù)熱的函數(shù)鏡像,F(xiàn)1,F(xiàn)2占用一個(gè)單位內(nèi)存,F(xiàn)3,F(xiàn)4占用2 個(gè)單位內(nèi)存.D表示函數(shù)請求的冷啟動(dòng)時(shí)間,若函數(shù)請求為熱啟動(dòng)則不存在D;E表示函數(shù)請求的執(zhí)行時(shí)間.可以看到,F(xiàn)CFS,SJF 和FuncSched 的平均函數(shù)完成時(shí)間分別是7.25,9.25 和5.5.因?yàn)镕uncSched考慮了緩存機(jī)制的影響和函數(shù)的空間特性,會(huì)優(yōu)先執(zhí)行F4函數(shù)請求,這樣一方面減少了函數(shù)請求的等待時(shí)間,另一方面也增大了函數(shù)的熱啟動(dòng)概率,進(jìn)而實(shí)現(xiàn)了最優(yōu)的平均函數(shù)完成時(shí)間.而FCFS,SJF 只考慮了函數(shù)請求的時(shí)間特性,嚴(yán)格要求函數(shù)請求按序執(zhí)行,忽略了緩存機(jī)制和函數(shù)空間特性,效果均不理想. Fig.3 Example of different algorithms圖3 不同算法的示例 3.3.5 函數(shù)執(zhí)行公平性 當(dāng)使用FuncSched 調(diào)度時(shí),如果優(yōu)先級(jí)P[k]較高的函數(shù)請求不斷到達(dá),可能會(huì)導(dǎo)致有些函數(shù)的饑餓.這是因?yàn)檎麄€(gè)服務(wù)器無感知計(jì)算平臺(tái)的資源可能會(huì)一直分配給不斷到達(dá)的函數(shù)高優(yōu)先級(jí)請求,而其他函數(shù)請求一直處于待執(zhí)行狀態(tài). 對(duì)于這種狀況,F(xiàn)uncSched 會(huì)維護(hù)一個(gè)更高的優(yōu)先級(jí)隊(duì)列Qstarve,并設(shè)置一個(gè)可調(diào)節(jié)的閾值StarveThreshold.當(dāng)一個(gè)函數(shù)請求的等待時(shí)間F[k]s-F[k]a>StarveThreshold時(shí),該請求將會(huì)被調(diào)入Qstarve.在Qstarve中,所有函數(shù)請求按照等待時(shí)間從大到小排序,隊(duì)頭函數(shù)請求將被FuncSched 調(diào)度器最先執(zhí)行.當(dāng)Qstarve為空時(shí),剩余函數(shù)請求再按照函數(shù)請求優(yōu)先級(jí)P[k]執(zhí)行.依靠這一機(jī)制,F(xiàn)uncSched 能夠避免低優(yōu)先級(jí)函數(shù)請求的饑餓情況. 3.3.6 FuncSched 調(diào)度性能優(yōu)化 每當(dāng)空閑可用的函數(shù)容器數(shù)W(j)發(fā)生變化時(shí),調(diào)度器就需要對(duì)所有依賴該函數(shù)鏡像的函數(shù)請求更新其優(yōu)先級(jí)P[k],并對(duì)這些函數(shù)請求進(jìn)行重排序.這有一定的調(diào)度開銷,尤其是在整個(gè)服務(wù)器無感知計(jì)算平臺(tái)負(fù)載很大的情況下. 針對(duì)這一問題,一個(gè)關(guān)鍵觀察是,對(duì)于同一函數(shù),其所有待執(zhí)行的函數(shù)請求優(yōu)先級(jí)P(k)相同.因此,可以將這些函數(shù)請求按照依賴的函數(shù)鏡像聚合在一起,形成按照時(shí)間排序的函數(shù)請求列表,在Qstarve為空時(shí),F(xiàn)uncSched 通過對(duì)聚合后的集合按照優(yōu)先級(jí)排序來進(jìn)行調(diào)度.微軟公司開源的服務(wù)器無感知計(jì)算平臺(tái)實(shí)際用戶函數(shù)執(zhí)行數(shù)據(jù)集Azure Functions顯示,大約20%的服務(wù)器無感知函數(shù)應(yīng)用產(chǎn)生了99.6%的函數(shù)請求[3],所以待執(zhí)行的函數(shù)請求所屬的函數(shù)鏡像是有限的.通過聚合函數(shù)請求能進(jìn)一步降低函數(shù)請求的調(diào)度開銷. 為了評(píng)估所提調(diào)度算法的性能,本文基于真實(shí)世界服務(wù)器無感知計(jì)算負(fù)載數(shù)據(jù)集,進(jìn)行了一系列實(shí)驗(yàn).本節(jié)首先對(duì)實(shí)驗(yàn)中算法的實(shí)現(xiàn)進(jìn)行詳細(xì)說明,然后介紹實(shí)驗(yàn)環(huán)境和數(shù)據(jù)集的選擇,最后展示實(shí)驗(yàn)結(jié)果并進(jìn)行深入分析. 本文基于開源的OpenWhisk 服務(wù)器無感知計(jì)算框架實(shí)現(xiàn)了原型系統(tǒng).通過修改中央控制器和工作結(jié)點(diǎn)代碼,實(shí)現(xiàn)了所提的基于時(shí)空特征的函數(shù)調(diào)度算法FuncSched,其能夠兼容各種函數(shù)鏡像緩存策略. 在中央控制器端,實(shí)現(xiàn)了基于時(shí)空特征的優(yōu)先級(jí)調(diào)度器.當(dāng)調(diào)度器接收到任務(wù)時(shí),它將任務(wù)插入一個(gè)優(yōu)先級(jí)隊(duì)列中.當(dāng)有空閑資源,包括空閑內(nèi)存或者空閑的熱容器時(shí),調(diào)度器會(huì)從優(yōu)先級(jí)隊(duì)列中選取具有最高優(yōu)先級(jí)的任務(wù),并將其下發(fā)到工作節(jié)點(diǎn)進(jìn)行執(zhí)行.為了配合優(yōu)先級(jí)隊(duì)列的實(shí)現(xiàn),實(shí)現(xiàn)了緩存容器統(tǒng)計(jì)組件以及函數(shù)冷啟動(dòng)和執(zhí)行時(shí)間測量統(tǒng)計(jì)組件,以支持優(yōu)先級(jí)的計(jì)算. 在工作節(jié)點(diǎn)端,在容器池的源代碼中復(fù)現(xiàn)了3 種現(xiàn)有函數(shù)鏡像緩存算法,分別是LRU 算法、Faas-Cache[4]的優(yōu)先級(jí)驅(qū)逐算法、Serverless in the Wild[3]的基于歷史統(tǒng)計(jì)的預(yù)熱和驅(qū)逐算法.為實(shí)現(xiàn)Serverless in the Wild 的預(yù)熱算法,修改了中央控制器與工作節(jié)點(diǎn)之間的通信機(jī)制,使系統(tǒng)能夠根據(jù)算法預(yù)測結(jié)果及時(shí)預(yù)熱和驅(qū)逐指定容器. 本文實(shí)驗(yàn)使用了一個(gè)由9 臺(tái)機(jī)器構(gòu)成的集群,其中1 臺(tái)機(jī)器用作控制節(jié)點(diǎn),另外8 臺(tái)機(jī)器用作工作節(jié)點(diǎn).每臺(tái)機(jī)器都配置了Ubuntu 18.04 操作系統(tǒng),并配備了硬件規(guī)格:1 個(gè)Xeon E5-2450 處理器(8 核,2.1 GHz)、16 GB 內(nèi)存(4×2 GB RDIMMs,1.6 GHz)、4 個(gè)500 GB 7.2K SATA 硬盤.通過Kubernetes 在這9 臺(tái)節(jié)點(diǎn)的集群上部署了OpenWhisk. 本文實(shí)驗(yàn)選取微軟Azure Functions 數(shù)據(jù)集[3],該數(shù)據(jù)集為Azure Functions 服務(wù)器無感知計(jì)算平臺(tái)上的函數(shù)樣本,包含超過5 萬個(gè)函數(shù),每個(gè)函數(shù)信息包含函數(shù)調(diào)用記錄、執(zhí)行時(shí)間和內(nèi)存占用大小. 為了評(píng)估所提調(diào)度算法在不同種類任務(wù)集上的性能,本文采取和文獻(xiàn)[4]相同的采樣方法,通過代表性函數(shù)采樣、少見函數(shù)采樣、隨機(jī)函數(shù)采樣3 種方法,采樣出具有不同降采樣比例的小樣本.每個(gè)小樣本集均包含200 個(gè)不同函數(shù)在5min 內(nèi)的數(shù)千次到數(shù)萬次調(diào)用.每個(gè)數(shù)據(jù)集分別選取從低到高多個(gè)不同的降采樣比例采樣,代表不同的負(fù)載量,以綜合評(píng)判測試算法在不同負(fù)載狀況下的性能.3 種采樣方法的具體采樣原理描述及其選取目標(biāo)為: 1)代表性函數(shù)采樣指以調(diào)用頻率為標(biāo)準(zhǔn),從數(shù)據(jù)集中調(diào)用頻率分布的四分位分別進(jìn)行采樣,總計(jì)采樣出200 個(gè)函數(shù)樣本.這樣的數(shù)據(jù)集既能包含較少調(diào)用的函數(shù),又能包含頻繁調(diào)用的函數(shù),可以檢驗(yàn)算法在典型工作場景下的性能. 2)少見函數(shù)采樣指200 個(gè)最少調(diào)用的函數(shù)的隨機(jī)樣本,這樣的函數(shù)常常導(dǎo)致冷啟動(dòng),可以檢驗(yàn)算法對(duì)冷啟動(dòng)的感知和利用. 3)隨機(jī)函數(shù)采樣指隨機(jī)采樣的200 個(gè)函數(shù)樣本. 每個(gè)樣本集在不同降采樣比例下的總函數(shù)調(diào)用次數(shù)和調(diào)用頻率如表2 所示. Table 2 Total Invocation Amount and Frequency in Traces表2 樣本數(shù)據(jù)集中函數(shù)調(diào)用總次數(shù)和頻率 本節(jié)說明評(píng)估FuncSched 算法綜合性能的實(shí)驗(yàn)指標(biāo)和對(duì)照組,展示實(shí)驗(yàn)結(jié)果并對(duì)所提算法在不同場景下的性能進(jìn)行分析. 采取平均函數(shù)完成時(shí)間作為性能指標(biāo).函數(shù)完成時(shí)間包括排隊(duì)時(shí)間、冷啟動(dòng)時(shí)間、執(zhí)行時(shí)間3部分. 在對(duì)照算法方面,實(shí)驗(yàn)選取OpenWhisk 默認(rèn)的FCFS 算法作為對(duì)照組. 綜合性能實(shí)驗(yàn)在代表性函數(shù)采樣、隨機(jī)函數(shù)采樣和少見函數(shù)采樣3 個(gè)數(shù)據(jù)集上進(jìn)行,計(jì)算了Func-Sched 調(diào)度算法在各參數(shù)下的平均完成時(shí)間加速比,即以對(duì)照算法的平均完成時(shí)間除以FuncSched 算法平均完成時(shí)間.在綜合性能的各項(xiàng)實(shí)驗(yàn)中,均采取了LRU 緩存策略作為函數(shù)鏡像緩存策略. 圖4 展示了綜合性能實(shí)驗(yàn)的結(jié)果.可以看到,在各個(gè)數(shù)據(jù)集上,F(xiàn)uncSched 均有高達(dá)2~6 倍的加速比. Fig.4 Average completion time on different traces with LRU algorithm圖4 結(jié)合 LRU 算法在不同數(shù)據(jù)集上的平均完成時(shí)間 如圖4(a)所示,在代表性函數(shù)采樣數(shù)據(jù)集上,當(dāng)降采樣比例為0.6 時(shí),可以取得2.7 倍的加速比.當(dāng)降采樣比例為0.7 時(shí),加速比提升到3.3 倍.在典型場景下,F(xiàn)uncSched 能實(shí)現(xiàn)較高加速比,能夠大幅提升系統(tǒng)在大多數(shù)場景下的性能. 如圖4(b)所示,即使是在隨機(jī)函數(shù)采樣數(shù)據(jù)集上,系統(tǒng)也取得了高達(dá)2.2 倍的加速比.隨機(jī)函數(shù)采樣往往包含大量執(zhí)行時(shí)間和頻率均較短的函數(shù),系統(tǒng)整體負(fù)載偏低,F(xiàn)uncSched 仍然能夠取得較大的性能提升,可見FuncSched 算法能夠普遍適用于服務(wù)器無感知計(jì)算的各個(gè)工作場景. 如圖4(c)所示,在少見函數(shù)采樣數(shù)據(jù)集上的加速比最為顯著.當(dāng)降采樣比例達(dá)到0.10 時(shí),F(xiàn)uncSched能實(shí)現(xiàn)5 倍的加速比.當(dāng)降采樣比例達(dá)到0.20 時(shí),加速比進(jìn)一步提高至6 倍.對(duì)于服務(wù)器無感知計(jì)算平臺(tái),由于函數(shù)請求特征差別較大,大量函數(shù)請求只需消耗較少資源,少數(shù)函數(shù)請求消耗大量資源,冷啟動(dòng)時(shí)間較長.故能實(shí)現(xiàn)在該類少見函數(shù)采樣上的性能優(yōu)化,對(duì)于整體系統(tǒng)性能提升至關(guān)重要. 下面分析平均完成時(shí)間隨降采樣比例增加的變化趨勢.在圖4 中可以看到,隨著降采樣比例的增加,F(xiàn)uncSched 的平均完成時(shí)間僅緩慢增加.相比之下,F(xiàn)CFS 算法在超過一定降采樣比例后,平均完成時(shí)間迅速增加,使其性能顯著差于FuncSched.這在代表性函數(shù)采樣和少見函數(shù)采樣數(shù)據(jù)集上效果尤為明顯.在代表性函數(shù)采樣數(shù)據(jù)集上,當(dāng)降采樣比例為0.4 時(shí)2 種算法性能基本一致;當(dāng)降采樣比例為0.5 時(shí)FuncSched 開始優(yōu)于FCFS;當(dāng)降采樣比例達(dá)到0.6 時(shí),F(xiàn)CFS 算法下的平均完成時(shí)間就已經(jīng)達(dá)到FuncSched算法的3 倍以上.同樣地,在少見函數(shù)采樣數(shù)據(jù)集中,降采樣比例為0.05 時(shí),兩算法性能基本一致;當(dāng)降采樣比例達(dá)到0.10 時(shí),F(xiàn)CFS 算法的平均完成時(shí)間達(dá)到FuncSched 算法的3 倍以上.故FuncSched 能夠承受遠(yuǎn)多于FCFS 算法負(fù)載,同時(shí)保持相對(duì)較低的平均完成時(shí)間. 為了進(jìn)一步對(duì)比FuncSched 和一些在操作系統(tǒng)等領(lǐng)域廣泛應(yīng)用的經(jīng)典調(diào)度算法的區(qū)別,本文在代表性函數(shù)采樣數(shù)據(jù)集上,分別采取不同參數(shù)進(jìn)行了實(shí)驗(yàn),記錄了函數(shù)請求的平均完成時(shí)間.除了FCFS外,實(shí)驗(yàn)比較了其余3 種經(jīng)典調(diào)度算法. 1)時(shí)間片輪轉(zhuǎn)調(diào)度(round robin,RR)算法.這是任務(wù)調(diào)度系統(tǒng)常用的算法,每個(gè)任務(wù)每次被調(diào)度時(shí)獲得至多固定長度的時(shí)間片.本文實(shí)驗(yàn)選取的時(shí)間片為100 ms. 2)最短剩余時(shí)間優(yōu)先(shortest remaining time first,SRTF)算法.相比FuncSched 算法,SRTF 算法只考慮時(shí)間特征,不考慮空間特征.該算法每次調(diào)度剩余執(zhí)行時(shí)間最短的函數(shù)請求執(zhí)行,調(diào)度器在每個(gè)函數(shù)請求執(zhí)行至多100 ms 后決定是否搶占. 3)最小運(yùn)行時(shí)內(nèi)存優(yōu)先(smallest runtime memory first,SRF)算法.相比FuncSched 算法,SRF 算法只考慮空間特征,不考慮時(shí)間特征,每次調(diào)度選取占用內(nèi)存最小的函數(shù)請求. 圖5 展示了FuncSched 與這些經(jīng)典調(diào)度算法的實(shí)驗(yàn)對(duì)比結(jié)果.可以看出,由于函數(shù)冷啟動(dòng)開銷較大,帶有搶占的算法,即RR 算法和SRTF 算法,會(huì)因?yàn)轭l繁搶占帶來頻繁的冷啟動(dòng)開銷,性能差于Open-Whisk 原始的FCFS 算法.另外,只考慮空間特征的算法SRF 因?yàn)橹豢紤]了函數(shù)的單一維度特征,性能差于FuncSched 算法.故可以說明綜合考慮空間特征和時(shí)間特征能使得服務(wù)器無感知計(jì)算調(diào)度器獲得更優(yōu)的性能. Fig.5 Average completion time of FuncSched and classical scheduling algorithms圖5 FuncSched 和經(jīng)典調(diào)度算法的平均完成時(shí)間 本節(jié)通過分析平均完成時(shí)間的各個(gè)組成部分,分析FuncSched 算法相對(duì)于FCFS 算法得到大比例性能提升的原因.函數(shù)完成時(shí)間包括排隊(duì)時(shí)間、冷啟動(dòng)時(shí)間和執(zhí)行時(shí)間.由于對(duì)于同一個(gè)數(shù)據(jù)集的同一個(gè)降采樣比例,平均執(zhí)行時(shí)間相同,平均排隊(duì)時(shí)間和平均冷啟動(dòng)時(shí)間不同,故本節(jié)對(duì)后兩者進(jìn)行分析. 圖6 展示了FuncSched 和對(duì)照算法在不同緩存策略下平均排隊(duì)時(shí)間的對(duì)比.數(shù)據(jù)集選取為代表性函數(shù)采樣,降采樣比例為0.7.從平均排隊(duì)時(shí)間上看,在Serverless in the Wild 的緩存策略下,F(xiàn)uncSched 減少了92.5%的排隊(duì)時(shí)間,而在排隊(duì)時(shí)間最低的 LRU緩存策略下,F(xiàn)uncSched 也減少了83.9%的排隊(duì)時(shí)間.可見FuncSched 通過優(yōu)先調(diào)度執(zhí)行時(shí)間較短、內(nèi)存消耗較少的函數(shù),顯著減少了函數(shù)請求的平均排隊(duì)時(shí)間. Fig.6 Average queuing time of different policies圖6 不同策略的平均排隊(duì)時(shí)間 圖7 展示了FuncSched 和對(duì)照算法在不同緩存策略下平均冷啟動(dòng)時(shí)間的對(duì)比.數(shù)據(jù)集選取為代表性函數(shù)采樣,降采樣比例為0.7.平均冷啟動(dòng)時(shí)間減少了高達(dá)12.5%.在FuncSched 中仍存在的冷啟動(dòng)通常包括2 部分:一部分是因?yàn)檎{(diào)用十分稀少導(dǎo)致緩存性價(jià)比較低,故在調(diào)用時(shí)的冷啟動(dòng)是最佳選擇;另一部分是因?yàn)檎{(diào)用頻率很高,故需要維護(hù)大量容器盡快執(zhí)行該類函數(shù)的請求,以實(shí)現(xiàn)低服務(wù)延時(shí),這些較大數(shù)量的容器初始化時(shí)就會(huì)有相應(yīng)的冷啟動(dòng)開銷也是不可避免的.故可知FuncSched 以降低平均任務(wù)完成時(shí)間為目標(biāo),把冷啟動(dòng)時(shí)間考慮在優(yōu)先級(jí)內(nèi),優(yōu)先執(zhí)行熱啟動(dòng)函數(shù),從而減少冷啟動(dòng)發(fā)生率,使得冷啟動(dòng)時(shí)間幾乎減少到最低值. Fig.7 Average cold start time of different policies圖7 不同策略的平均冷啟動(dòng)時(shí)間 為了展現(xiàn)FuncSched 對(duì)于系統(tǒng)中單個(gè)函數(shù)的性能提升情況,實(shí)驗(yàn)統(tǒng)計(jì)了所有函數(shù)每次調(diào)用的完成時(shí)間.圖8 展示了函數(shù)完成時(shí)間的累計(jì)分布函數(shù)圖.這是在代表性函數(shù)采樣數(shù)據(jù)集、降采樣比例為0.7 下的實(shí)驗(yàn)結(jié)果.可以看出,F(xiàn)CFS 算法有大量函數(shù)完成時(shí)間顯著高于FuncSched 算法.FCFS 算法有25.9%的函數(shù)完成時(shí)間超過100 s,大量函數(shù)請求經(jīng)歷高完成延遲.相比之下,F(xiàn)uncSched 完成時(shí)間超過100 s 的只有5.2%,保持了較高的響應(yīng)速度.這表明FuncSched相對(duì)于原始OpenWhisk 在性能方面對(duì)于大部分函數(shù)都能使其性能明顯提升. Fig.8 Function completion time CDF圖8 函數(shù)完成時(shí)間累積分布函數(shù) 服務(wù)器無感知計(jì)算的函數(shù)請求有時(shí)存在服務(wù)級(jí)別目標(biāo)(service level objective,SLO),常見的例如延遲目標(biāo).圖9 展示了FCFS 算法和FuncSched 算法在不同SLO 下的任務(wù)完成率,F(xiàn)uncSched 算法能夠?qū)⑷蝿?wù)完成率提高27%~41%.由此可見,F(xiàn)uncSched 可以提升函數(shù)整體SLO 達(dá)成率,不會(huì)導(dǎo)致運(yùn)行時(shí)間較長的函數(shù)過多違背SLO. Fig.9 Function finish rate under SLO圖9 函數(shù)的 SLO 達(dá)成率 FuncSched 能夠兼容不同的函數(shù)鏡像緩存策略.在各個(gè)函數(shù)鏡像緩存策略下,F(xiàn)uncSched 相較于FCFS都能大幅減少函數(shù)請求的平均完成時(shí)間.為了驗(yàn)證這一點(diǎn),本文在3 個(gè)數(shù)據(jù)集上進(jìn)行了一系列實(shí)驗(yàn),將FuncSched 和FCFS 與LRU,FaasCache 和Serverless in the Wild 這3 種函數(shù)鏡像緩存策略相結(jié)合,并分別測量了平均完成時(shí)間.實(shí)驗(yàn)在代表性函數(shù)采樣數(shù)據(jù)集上進(jìn)行. 圖10 展示了在3 個(gè)數(shù)據(jù)集上,F(xiàn)uncSched 和FCFS采用不同緩存策略以及不同降采樣比例下的平均任務(wù)完成時(shí)間.在3 種緩存策略下,F(xiàn)uncSched 相較于FCFS 均有高達(dá)4~5 倍的加速比.在平均完成時(shí)間的絕對(duì)值上,當(dāng)降采樣比例不高于0.7 時(shí),F(xiàn)uncSched 都能將平均完成時(shí)間保持在15 s 以內(nèi),而FCFS 的平均完成時(shí)間會(huì)迅速上升至60 s 以上.實(shí)驗(yàn)結(jié)果表明Func-Sched 能夠兼容各種函數(shù)鏡像緩存策略,并能顯著降低函數(shù)平均完成時(shí)間. Fig.10 Average completion time under different cache policies圖10 不同緩存策略下的平均完成時(shí)間 本文研究了服務(wù)器無感知計(jì)算場景下的函數(shù)調(diào)度問題.通過對(duì)服務(wù)器無感知計(jì)算場景的分析和數(shù)學(xué)建模,提出了基于函數(shù)時(shí)空特征的服務(wù)器無感知計(jì)算函數(shù)調(diào)度算法FuncSched.FuncSched 通過分析函數(shù)的時(shí)間特征和空間特征,并且綜合考慮函數(shù)自身邏輯和服務(wù)器無感知計(jì)算平臺(tái)函數(shù)鏡像緩存機(jī)制的影響,實(shí)現(xiàn)了對(duì)函數(shù)性能的精準(zhǔn)評(píng)估.基于函數(shù)的時(shí)空特征,F(xiàn)uncSched 通過調(diào)度算法避免了函數(shù)請求的隊(duì)頭阻塞現(xiàn)象,進(jìn)而降低了平均函數(shù)完成時(shí)間.針對(duì)FunSched 原型系統(tǒng)的實(shí)驗(yàn)結(jié)果表明,F(xiàn)uncSched 能夠在各種函數(shù)請求場景中顯著降低平均函數(shù)完成時(shí)間,并且兼容各種服務(wù)器無感知計(jì)算函數(shù)鏡像緩存算法. 未來的工作包括3 個(gè)方面:1)考慮將函數(shù)運(yùn)行的生命周期分為函數(shù)拉取和函數(shù)執(zhí)行等多階段進(jìn)行異步調(diào)度,并考慮預(yù)測函數(shù)調(diào)用時(shí)間并預(yù)先異步拉取函數(shù)鏡像等機(jī)制和更細(xì)粒度的并發(fā)影響[43];2)研究本地函數(shù)鏡像緩存的預(yù)取策略,將預(yù)取策略與調(diào)度算法進(jìn)行協(xié)同設(shè)計(jì),進(jìn)一步優(yōu)化函數(shù)完成時(shí)間;3)將函數(shù)調(diào)度擴(kuò)展到函數(shù)工作流,根據(jù)函數(shù)工作流的函數(shù)依賴關(guān)系,設(shè)計(jì)面向函數(shù)工作流的函數(shù)調(diào)度算法,優(yōu)化函數(shù)工作流完成時(shí)間. 作者貢獻(xiàn)聲明:金鑫提出研究思路和算法設(shè)計(jì);吳秉陽、劉方岳和章梓立負(fù)責(zé)實(shí)驗(yàn)設(shè)計(jì)和完成實(shí)驗(yàn);賈云杉負(fù)責(zé)文獻(xiàn)調(diào)研;所有作者都參與了文章撰寫和修改.3 服務(wù)器無感知計(jì)算調(diào)度算法
3.1 服務(wù)器無感知計(jì)算調(diào)度的挑戰(zhàn)
3.2 現(xiàn)有服務(wù)器無感知計(jì)算調(diào)度的局限性
3.3 基于時(shí)空特征的函數(shù)調(diào)度算法FuncSched
4 實(shí)驗(yàn)結(jié)果與分析
4.1 調(diào)度算法實(shí)現(xiàn)
4.2 實(shí)驗(yàn)環(huán)境與數(shù)據(jù)集
4.3 綜合性能實(shí)驗(yàn)與分析

4.4 性能提升原因分析
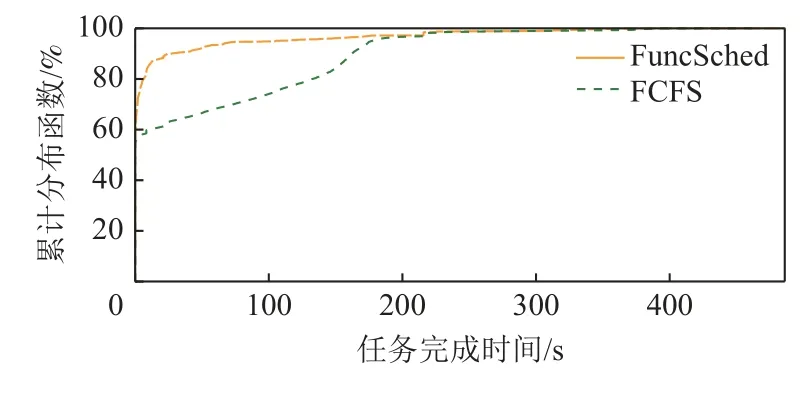
4.5 函數(shù)完成時(shí)間分布
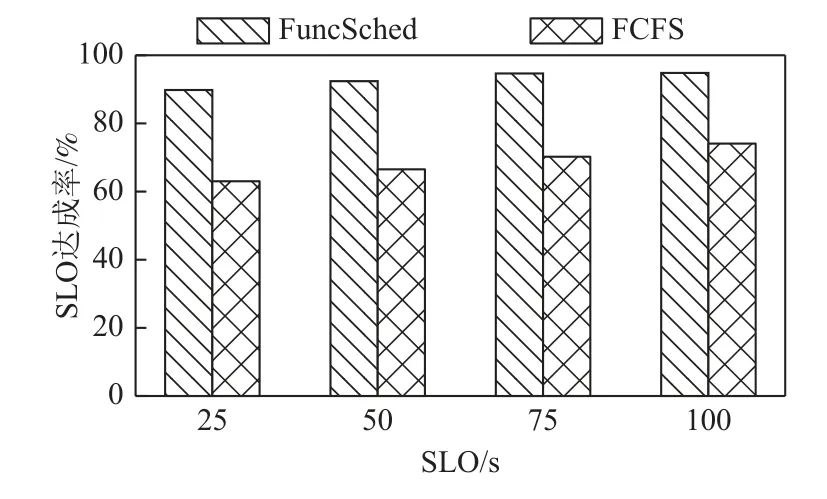
4.6 緩存策略兼容性
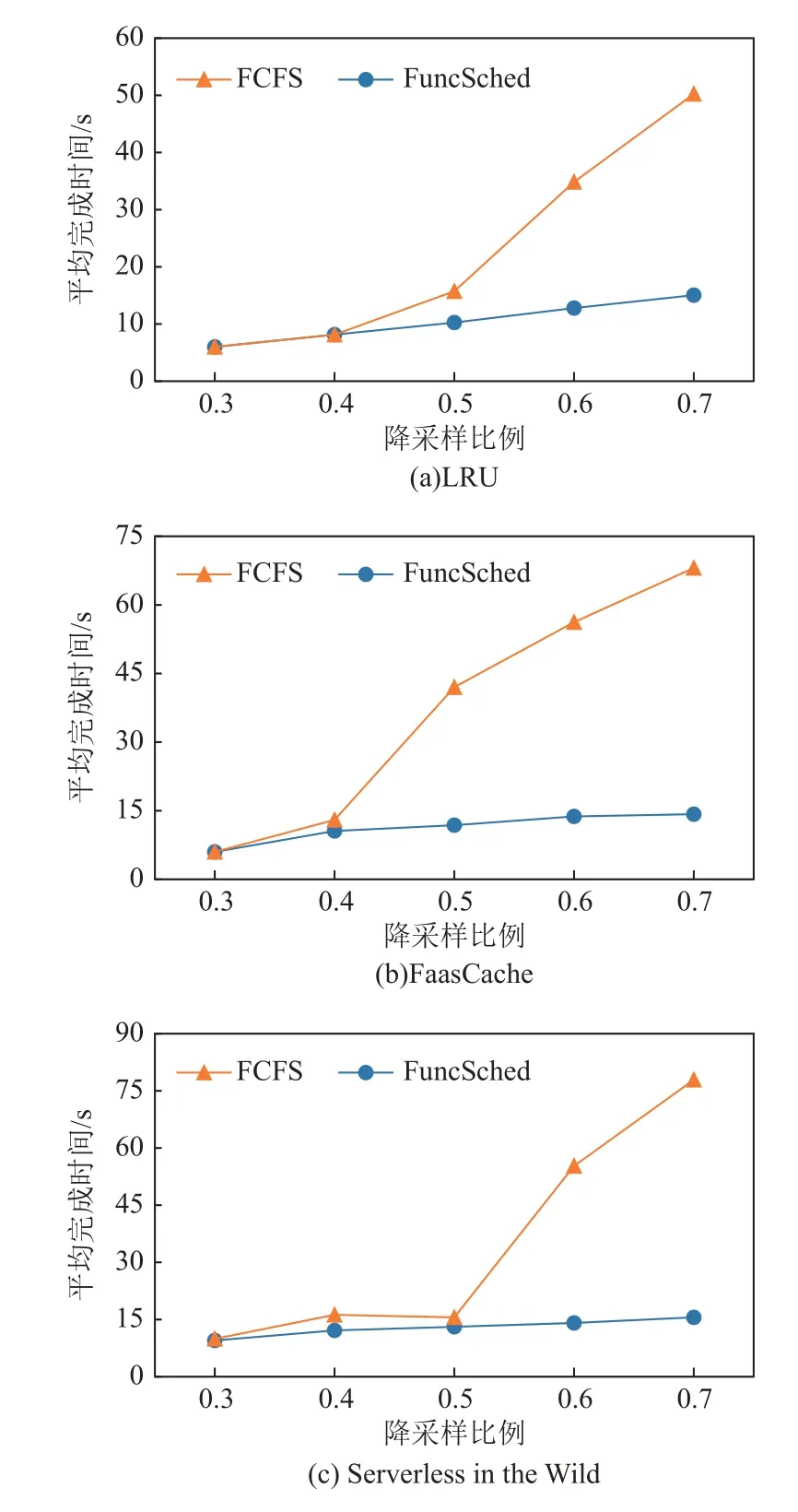
5 總結(jié)