基于Logistic指數(shù)型函數(shù)的孤島微電網(wǎng)下垂控制
2023-09-20 10:36:32邊曉燕
計算機仿真 2023年8期
關(guān)鍵詞:系統(tǒng)
曹 璟,徐 麗,邊曉燕
(1. 上海電力大學(xué)數(shù)理學(xué)院,上海 200090;2. 上海電力大學(xué)電氣學(xué)院,上海 200090)
1 引言
孤島微電網(wǎng)中的分布式電源通常以下垂控制為基礎(chǔ)的逆變器并聯(lián)技術(shù)組網(wǎng)運行[1,2]。下垂控制是通過測量局部有功功率和無功功率并根據(jù)下垂的增益來調(diào)節(jié)電壓和頻率[3]。由于下垂控制無需通信,故可靠性高、靈活性好,得到了廣泛的應(yīng)用[3-9]。然而,下垂控制缺點也十分明顯,下垂控制器降低頻率和電壓幅度[4],以便于模擬同步發(fā)電機調(diào)節(jié)功率,這將導(dǎo)致系統(tǒng)穩(wěn)定性差,輸出電壓的頻率和幅值有偏差,有功功率或者無功功率不能夠合理分配,影響微電網(wǎng)系統(tǒng)的電能質(zhì)量[4-7]。
為克服微電網(wǎng)傳統(tǒng)下垂控制的缺點,文獻(xiàn)[8]提出了在下垂系數(shù)處引入PI控制環(huán)節(jié)改進(jìn)方法,修正后的下垂系數(shù)更容易調(diào)節(jié),能夠提高系統(tǒng)的適應(yīng)性。文獻(xiàn)[9]提出了基于S形曲線的下垂控制策略,能夠根據(jù)負(fù)載實時變化動態(tài)調(diào)節(jié)功率,從而實現(xiàn)動態(tài)調(diào)節(jié)微電網(wǎng)系統(tǒng)的頻率,達(dá)到減小頻率波動的效果。文獻(xiàn)[10]提出了一種反S形曲線下垂控制方法,通過采用曲直結(jié)合,分段處理,在兼顧電能質(zhì)量的同時能夠?qū)β拾慈萘坑行Х峙洹N墨I(xiàn)[11]提出了一種下垂系數(shù)隨功率變化的自適應(yīng)下垂控制方法,能夠及時地調(diào)節(jié)下垂系數(shù)和反映出功率的變化趨勢,有效提高了系統(tǒng)的穩(wěn)定運行性能。
本文在上述研究基礎(chǔ)上,改進(jìn)了傳統(tǒng)下垂控制方程,以解決頻率對系統(tǒng)穩(wěn)定的影響。基于Logistic指數(shù)型函數(shù)的兩端飽和特性,改進(jìn)了下垂控制方程,能夠保障頻率穩(wěn)定和改善功率控制精度。通過合理配置參數(shù),可以實現(xiàn)投切負(fù)載時,更好地進(jìn)行功率分配,滿足負(fù)載變化的需求,維持系統(tǒng)電壓和頻率的穩(wěn)定性,并通過兩個算例驗證所提出方法的有效性。
2 傳統(tǒng)下垂控制
圖1為傳統(tǒng)下垂控制系統(tǒng)原理框圖[4]。首先通過實時采樣系統(tǒng)的輸出電壓Uo和電流Io。將系統(tǒng)輸出電壓和電流測量輸入功率計算模塊,計算出實際輸出功率。利用傳統(tǒng)下垂控制算法得到參考電壓Eref。電壓電流雙閉環(huán)根據(jù)參考電壓Eref得到空間矢量脈寬調(diào)制調(diào)制波SVPWM,從而控制來自系統(tǒng)的輸出電壓,實現(xiàn)整體的精確控制。

圖1 傳統(tǒng)的下垂控制原理框圖
為研究孤島模式下微電網(wǎng)中下垂控制原理,以兩臺分布式電源(distributed generation, DG)并聯(lián)運行為例,其等效模型如圖2。

圖2 多微源并聯(lián)運行模型
由基爾霍夫定律可知,逆變器輸出電流為

(1)
第i臺(i=1,2)逆變器輸出的有功功率Pi和無功功率Qi分別表示為:

(2)

(3)
式中:Zi和θi分別為線路阻抗值和阻抗角;Ei和δi分別為微電源的電壓幅值和相角;V為系統(tǒng)母線電壓幅值。
設(shè)線路阻抗中Xi?Ri,可以忽略線路阻抗的阻性分量;由于相角較小,故sinδi≈δi,cosδi≈1。基于以上兩點,可將上式簡化為

(4)

(5)
逆變器輸出的有功功率P可有功率角δ控制,無功功率Q的輸出可以通過改變電壓幅值V來實現(xiàn)。因此,下垂控制的模型可以描述為
f=fn-a(P-Pn)
(6)
U=Un-b(Q-Qn)
(7)
式子中:f、U分別為輸出電壓的頻率、輸出電壓的幅值,P、Q分別為輸出有功功率、無功功率,fn、Un分別為頻率參考值、電壓參考值,Pn、Qn分別為有功功率額定值、無功功率額定值。a、b分別為下垂系數(shù)。
微電網(wǎng)下垂控制模擬了發(fā)電機的一次調(diào)頻和調(diào)壓特性。在小信號干擾的情況下,它可以通過其獨特的特性恢復(fù)穩(wěn)態(tài)運行,獲得發(fā)電機的一般動態(tài)響應(yīng)能力。然而,當(dāng)負(fù)荷投入或切出時,系統(tǒng)的頻率波動將導(dǎo)致與電網(wǎng)頻率不匹配的問題。因此,有必要對傳統(tǒng)下垂控制進(jìn)行改進(jìn)。
3 改進(jìn)下垂控制方法
3.1 新型下垂控制方程
在孤島模式中出現(xiàn)大容量微電源或大負(fù)荷投切時,微電網(wǎng)系統(tǒng)在傳統(tǒng)下垂控制模塊作用下,系統(tǒng)的頻率幅值將會超出限值,并且這個狀態(tài)將維持一定時間。這個問題將會導(dǎo)致微電網(wǎng)系統(tǒng)電能質(zhì)量下降,文獻(xiàn)[10]中所提出的改進(jìn)下垂控制方法,對P-f下垂特性采取曲直結(jié)合,分段處理,對頻率偏差嚴(yán)重的工況采用反S曲線下垂控制方法,當(dāng)微電網(wǎng)系統(tǒng)受到投切大負(fù)荷時,能夠保障微電網(wǎng)系統(tǒng)的電能質(zhì)量,但是該模型相對復(fù)雜。對于傳統(tǒng)下垂控制的改進(jìn)方法,核心是對下垂控制方程進(jìn)行改造[12],故本文采用Sigmoid型函數(shù)中的Logistic函數(shù),它是一種典型的反S形函數(shù),依據(jù)該函數(shù)性質(zhì),對傳統(tǒng)下垂控制方程進(jìn)行改進(jìn)。
Logistic函數(shù)定義為
(8)
根據(jù)式(4),顯然P-f呈線性關(guān)系,該函數(shù)為兩端飽和函數(shù),通過設(shè)置參數(shù)可將頻率穩(wěn)定在50Hz。

(9)
當(dāng)m(P-Pn)足夠大時,f將無限趨于fn,從而實現(xiàn)跟蹤參考頻率,使系統(tǒng)頻率穩(wěn)定。系數(shù)m分別取不同量級時,對應(yīng)在負(fù)荷變化時系統(tǒng)頻率如表1所示,當(dāng)m取(0.00001,0.001)內(nèi),能夠兼顧頻率變化幅度和恢復(fù)時間。

表1 不同m值對應(yīng)的系統(tǒng)頻率

表2 算例1的微電網(wǎng)參數(shù)設(shè)置
3.2 新型下垂控制方程穩(wěn)定性分析
根據(jù)圖3可知,電壓外環(huán)傳遞函數(shù)與內(nèi)環(huán)傳遞函數(shù)分別為

圖3 逆變器控制框圖

(10)
Gi(s)=kip
(11)
io(s)
(12)
將式(12)改寫為二端口形式

(13)

(14)

(15)
式(14)和(15)中,G(s)是電感電流反饋控制下電壓閉環(huán)的傳遞函數(shù),Zo(s)是逆變器的等效輸出阻抗。逆變器電壓電流控制環(huán)的小信號模型可以表示為

(16)
由圖1所示,經(jīng)過功率計算模塊,實時計算出有功功率與無功功率。將計算出的有功功率和無功功率輸入到下垂控制模塊,得到參考相位和參考電壓,其中d軸參考電壓Ed,q軸參考電壓為Eq。功率計算小信號方程表示為
Δp=(UodΔIod+ΔUoqIoq)
(17)
Δq=(UoqΔIod-ΔUodIoq)
(18)
下垂控制環(huán)輸出小信號方程為
Δω=-kp(s)Δp
(19)
ΔEd=-bΔq
(20)
ΔEq=0
(21)
逆變器輸出電壓小信號模型表示為
ΔUo=-GU(s)Δq-Zo(s)Δio
(22)
逆變器輸出電流小信號型為

(23)
其中Gm為逆變器等效導(dǎo)納,Zm為逆變器等效阻抗將式(22)與式(23)代入式(17)可得

(24)
由式(24)可得
(A-E)·Δp=0,det(A-E)=0
(25)
根據(jù)式(25)得出系統(tǒng)特征根,繪制出奈奎斯特圖如圖4所示,根據(jù)廣義奈奎斯特穩(wěn)定判據(jù)[13],系統(tǒng)不經(jīng)過(-1,0)點,故系統(tǒng)理論上是穩(wěn)定的。

圖4 系統(tǒng)的奈奎斯特圖
4 微電網(wǎng)系統(tǒng)仿真分析
分別選取單個分布式電源系統(tǒng)和兩個分布式電源系統(tǒng)為實驗對象,基于MATLAB/Sim-ulink平臺搭建系統(tǒng)模型進(jìn)行仿真,圖5給出了微電網(wǎng)系統(tǒng)結(jié)構(gòu)仿真原理示意圖。

圖5 微電網(wǎng)算例仿真結(jié)構(gòu)圖
4.1 算例1:改進(jìn)傳統(tǒng)下垂控制方程的理論驗證
單個分布式電源微電網(wǎng)系統(tǒng)的仿真參數(shù)如表所示。微電網(wǎng)系統(tǒng)仿真時間為=~1s,0~0.2s系統(tǒng)處于空載狀態(tài),在0.2s時投入第一組負(fù)載,在0.5s時投入第二組負(fù)載。通過對比傳統(tǒng)下垂控制模型[7]和改進(jìn)后下垂控制模型來驗證本文提出的下垂控制方程能夠提高功率控制的精度。
圖6給出了系統(tǒng)頻率的仿真結(jié)果,可以看出,與傳統(tǒng)下垂控制方法相比,改進(jìn)后下垂控制的系統(tǒng)負(fù)載頻率能夠快速從暫態(tài)過度到穩(wěn)態(tài)。有功功率和無功功率的仿真結(jié)果如圖7和圖8所示,可以觀察到,在(0,0.2)內(nèi),由于DG系統(tǒng)處于空載運行狀態(tài),輸出的功率為0。在0.2s時刻,第一組負(fù)載投入,經(jīng)過暫態(tài)過程后,通過與投入負(fù)荷相比,傳統(tǒng)下垂控制輸出的有功功率和無功功率分別在ΔP=170W、ΔQ=1320Var波動。改進(jìn)下垂控制輸出有功功率和無功功率分別為ΔP=14W、ΔQ=60Var。在0.5s時刻投入第二組負(fù)載,經(jīng)過暫態(tài)過程后,通過與投入負(fù)荷相比,傳統(tǒng)下垂控制輸出的有功功率和無功功率分別在ΔP=364W、ΔQ=1907Var波動,改進(jìn)下垂控制輸出有功功率和無功功率分別為ΔP=23W、ΔQ=101Var。通過與負(fù)荷增加對比,改進(jìn)后的下垂控制提高了有功功率和無功功率控制精度,并且波形更平穩(wěn),有利于系統(tǒng)穩(wěn)定。圖9為仿真得到的參考電壓,與傳統(tǒng)方法相對,改進(jìn)方法的輸出電壓幅值跌落小,波形變化較平緩。
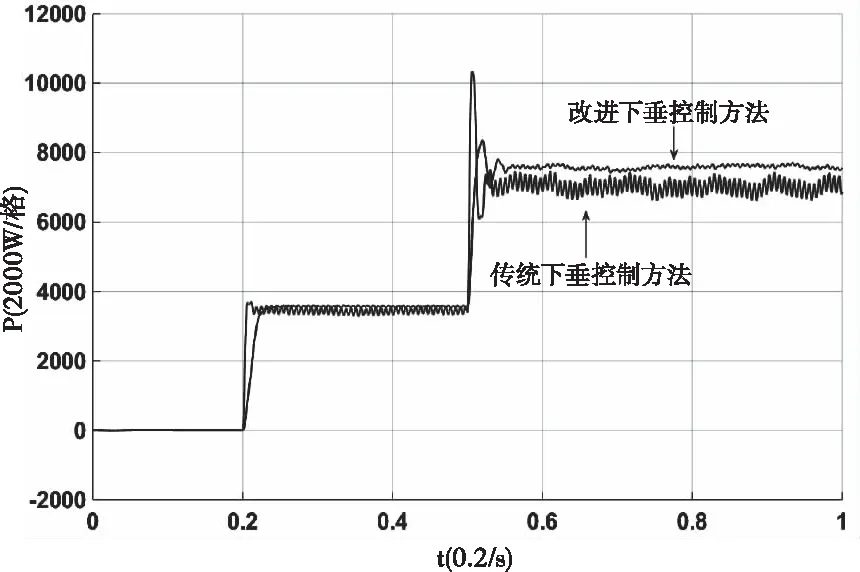
圖6 單個分布式電源系統(tǒng)不同下垂控制的有功功率對比

圖8 單個分布式電源系統(tǒng)不同下垂控制的無功功率對比

圖9 單個分布式電源系統(tǒng)不同下垂控制的輸出電壓幅值對比
4.2 算例2:改進(jìn)下垂控制方程對功率均分的驗證
實驗是對兩個分布式電源微電網(wǎng)系統(tǒng)進(jìn)行仿真。微電網(wǎng)系統(tǒng)仿真時間為0~1s,在初始時刻投入第一組負(fù)載,在0.5s時投入第二組負(fù)載,仿真參數(shù)如表3所示。通過對比傳統(tǒng)下垂控制模型來驗證改進(jìn)下垂控制方程能夠?qū)崿F(xiàn)功率均分。

表3 算例1的微電網(wǎng)參數(shù)設(shè)置
圖10和11分別給出了兩個分布式電源系統(tǒng)有功率功率和無功功率改進(jìn)前后的計算結(jié)果。可以發(fā)現(xiàn)改進(jìn)下垂控制后,有功功率計算準(zhǔn)確,能夠?qū)崿F(xiàn)兩個分布式電源有功功率均分,波形平穩(wěn),偏移量小,有利于系統(tǒng)穩(wěn)定。傳統(tǒng)下垂控制無功功率計算值偏大,與實際投入負(fù)荷值不符,且波形動蕩,影響穩(wěn)定性,而改進(jìn)下垂控制后,無功功率波形平緩,能夠?qū)崿F(xiàn)無功功率均分,但是計算值與實際投入負(fù)荷值不符合,需要進(jìn)一步改進(jìn)與完善。

圖10 兩個分布式電源系統(tǒng)不同下垂控制的有功功率分配
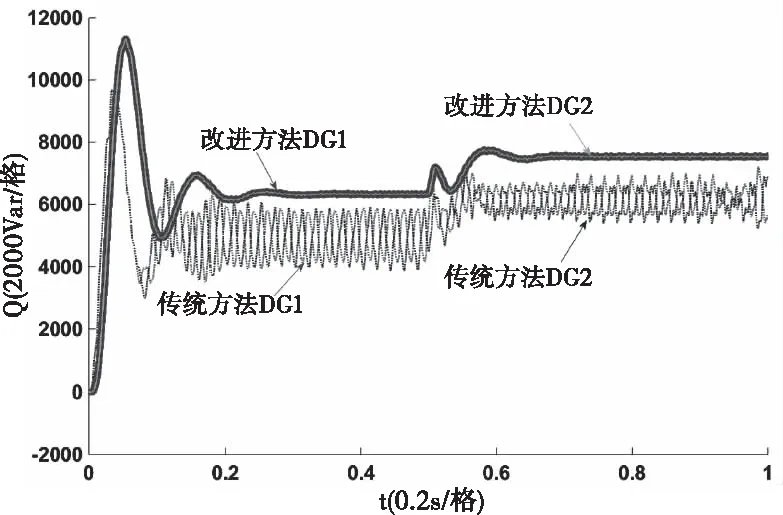
圖11 兩個分布式電源系統(tǒng)不同下垂控制的無功功率分配
5 結(jié)論
本文針對三相逆變器并聯(lián)系統(tǒng)提出了基于Logistic指數(shù)型函數(shù)的下垂控制方法。通過小信號分析法證明了系統(tǒng)在頻域上的穩(wěn)定性;通過兩個算例的時域仿真,驗證了改進(jìn)下垂控制方法相較于傳統(tǒng)下垂控制方法輸出波形更加平緩和穩(wěn)定,表明了所提出方法能夠提高功率控制的精度。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
