海面角反射體電磁散射特性與雷達鑒別研究進展與展望
2023-09-15 01:37:16李郝亮陳思偉
雷達學報 2023年4期
關鍵詞:特征
李郝亮 陳思偉
(國防科技大學電子科學學院 長沙 410073)
1 引言
精確制導武器的作戰效能是決定戰爭勝敗的關鍵,世界各軍事強國都在大力加強精確制導技術的研究和應用。導引頭是精確制導武器的“眼睛”,引導導彈實現對目標的精準打擊。雷達作為一種主動傳感器,可支持導引頭在復雜戰場環境下實現全天時、全天候、遠距離、高精度制導和打擊的作戰需求[1-5]。因此,雷達導引頭成為精確制導武器末制導的核心設備,在保證現代導彈打擊精度方面發揮著重要作用。
在對海攻擊時,雷達導引頭面臨著復雜電磁干擾的嚴重威脅。除了攔截彈硬毀傷方案外,艦載/舷外有源誘餌[6-8]、箔條[9]和角反射體[10-12]是3種最主要的誘騙干擾手段。其中,海面角反射體具有易攜帶、便于存儲使用等優點,布放后能快速形成雷達假目標,且具有全角域穩定的電磁能量反射性能,覆蓋頻段廣,干擾持續時間長[3],在散射特性、頻譜特性、極化特性及抗相參性等方面均具有自身優勢,可對雷達制導的武器系統產生明顯的干擾、欺騙和誘偏作用。因此,海面角反射體得到了國際主要軍事強國的高度重視和實際部署[11-14]。例如,英國研制的海面角反射體干擾系統(又被稱為“橡皮鴨”),已出口至美國、法國、荷蘭、西班牙等國家,并裝備于“伯克”級等主戰艦艇。
海面角反射體的應用對反艦導彈突防構成了極大威脅。作為攻擊方的反艦導彈,抗干擾技術是其核心能力之一,是決定戰場成敗的關鍵[4]。然而,由于角反射體信號與目標信號在時域、頻域、空域的顯性特征差異嚴重壓縮,角反射體雷達鑒別成為反艦對抗中的重難點問題。因此,研究海面角反射體雷達鑒別技術意義重大。角反射體電磁散射特性研究是提升角反射體雷達鑒別能力的基礎。通過揭示艦船和角反射體的電磁散射特性差異是實現角反射體雷達鑒別的重要途徑,當前已經形成了一系列代表性方法。本文從海面角反射體裝備與戰術運用、電磁散射特性以及雷達鑒別3個方面,對海面角反射體雷達鑒別技術的研究進行全面綜述,并總結出未來的技術發展趨勢。
2 海面角反射體裝備與戰術運用
2.1 海面角反射體裝備發展
在海戰場中,角反射體裝備大量涌現。海面角反射體的首次實戰應用是在1982年的英阿馬島海戰中[12]。由于表現出良好的干擾性能,世界各國相繼開始研制和部署海面角反射體,其中海面充氣式角反射體成為主流裝備。
海面充氣式角反射體通常由輕質復合材料制成,表面涂覆金屬,折疊收縮存放,使用時依靠自身重力或者高壓氣體進行布放,離舷后自動充氣展開成型,漂浮于海面形成干擾誘餌。比較有代表性的是英國的DLF系列。20世紀80年代初,英國埃文宇航公司研發出舷外充氣式角反射體干擾系統DLF-1[15]。DLF-1系統采用在甲板上先充氣后投放的方式,由于無法快速部署且性能不佳,該公司又先后研制出DLF-2和DLF-3等系統。DLF-2研制于20世紀80年代中期,該角反射體在結構上采用八象限三角形對稱結構。DLF-2的雷達散射截面(Radar Cross Section,RCS)相當于一艘護衛艦,可以在X波段形成2000~3000 m2的RCS,在4級海況條件下作用時間可達3小時[12]。由于具有較強的作戰性能,該系統已出口到美國、法國、意大利等海軍。美國海軍引進后命名為AN/SLQ-49(如圖1所示),并應用于1991年海灣戰爭。DLF-3于1996年開始投入使用,采用二十面體三角形結構,由60個大小相等的等腰直角三角形構成(如圖2所示)。DLF-3的雷達回波反射能力更強,且RCS在全角域范圍內更穩定,同時干擾頻率范圍可覆蓋2~40 GHz[4,6]。該系統采用高壓氣體彈射誘餌載荷的方式,并使用拉火索來激活內部充氣系統為角反射體充氣,可在數秒內快速成型部署。DLF-3目前仍在服役,并已裝備于英海軍護衛艦和驅逐艦等多型主戰艦艇。2013年,DLF-3出口至美國,經改進后命名為MK-59充氣式角反射體系統[13],并裝備于“伯克”級等導彈驅逐艦上。DLF-3角反射體裝備彌補了先前角反射體方向性、能量以及工作帶寬的不足,能夠更加逼真地模擬真實艦船目標的散射特征,欺騙作用更加明顯。
2.2 海面角反射體戰術運用研究
根據干擾原理與時機不同,海面角反射體可對末制導雷達形成沖淡式干擾和質心式干擾兩種主要干擾樣式[16]:(1)沖淡式干擾應用于末制導雷達開機前。在末制導雷達的搜索范圍內施放多個角反射體假目標,從而使雷達在搜索階段捕捉艦船目標的概率降低。(2)質心式干擾應用于末制導雷達跟蹤階段。施放的角反射體與艦船同處在末制導雷達的波束內和距離波門內。此時末制導雷達因無法分辨兩個目標,從而跟蹤艦船和角反射體的能量質心。隨著艦船的快速機動,末制導雷達的跟蹤點逐漸落在角反射體上,最終丟失艦船目標。圖3為沖淡式干擾和質心式干擾示意圖。
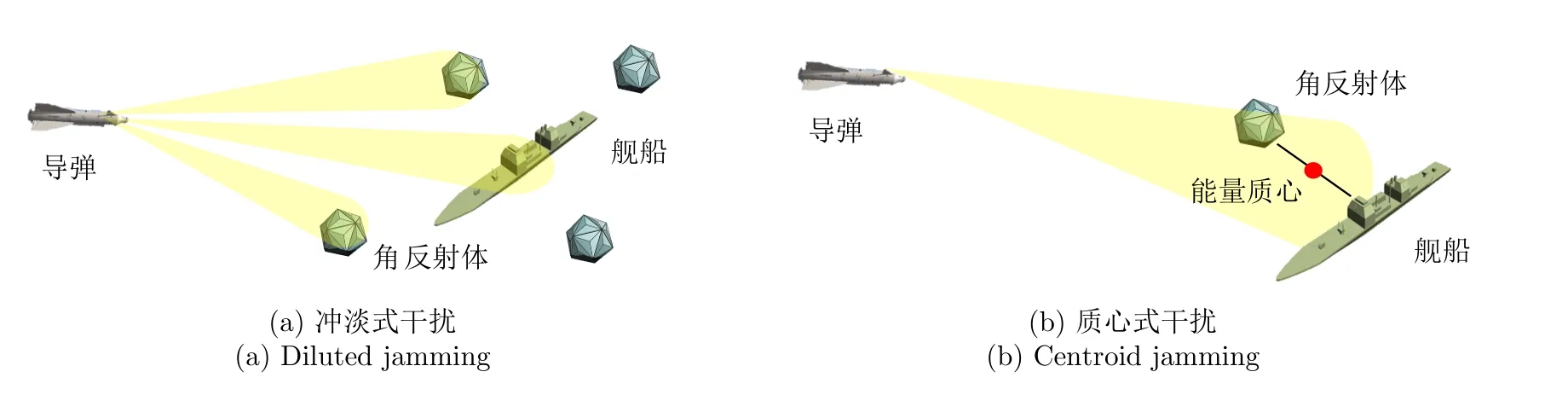
圖3 沖淡式干擾和質心式干擾示意圖Fig.3 Diagram of diluted jamming and centroid jamming
海面角反射體的戰術運用主要包括角反射體投放時機、投放距離、布放間隔、布放數量以及艦船機動方向、機動速度等因素,通常采用數據建模開展研究[17]。當艦上電子戰系統探測到雷達導引頭威脅時,艦船需要在數秒內快速做出對抗策略。只有迅速獲取敵方信息,準確把握角反射體投放時機,才能增加干擾的成功率[18-23]。為增強角反射體陣列干擾效能,研究人員首先參照箔條開展了針對浮空式角反射體陣列布放尋優的研究[24-27]。文獻[28]利用探索性分析方法建立了浮空式角反射體質心干擾的探索空間體系。針對海面角反射體,文獻[29]綜合利用RCS,高分辨率距離像(High Resolution Range Profile,HRRP)和極化特征,開展了角反射體陣列尋優研究。該研究結果表明,11個角反射體兩兩間隔5 m布放,能夠發揮更好的干擾效果。為了更進一步優化角反射體干擾策略,文獻[17]仿真模擬了艦船在面臨導彈追蹤時,角反射體投放和艦船規避的動態過程,為角反射體質心干擾的實際應用提供了理論依據。
除此之外,角反射體還通常與箔條等其他無源干擾和有源干擾配合使用。作為重要無源干擾手段之一,箔條在海上電子戰中一直有著廣泛的應用。利用角反射體和箔條組合干擾方式實現干擾互補,通過采取一種動靜結合、隱誘相稱的質心式干擾策略,可以解決角反射體干擾效果受限于自身展開時間的問題[30]。當前,世界上先進反艦導彈多采用復合制導方式以提高制導精度。針對主被動復合制導雷達,研究人員提出一種結合有源干擾的復合干擾策略[31,32]。具體地,利用艦載有源干擾對末制導雷達實施距離波門拖引,同時在偏離艦船方向上投擲復合誘餌。該復合誘餌由充氣式角反射體和有源干擾機組成,可使得主被動雷達均失去跟蹤目標,從而保障我方艦船的安全。
因此,隨著海面角反射體裝備的不斷改進以及戰術運用,角反射體對抗難度越來越大。此時角反射體雷達鑒別技術尤為關鍵,這對提高雷達導引頭系統在復雜電磁環境中的打擊能力和實用效能,具有重要的理論價值和現實意義。
3 海面角反射體電磁散射特性研究
電磁散射特性研究有助于準確解譯目標的電磁散射機理,為雷達目標檢測與識別提供必要的理論支撐[33-36]。為實現對角反射體電磁散射特性的準確分析,首先需要獲取高置信度的目標數據。相較于目標實驗測量[37,38]和微波暗室縮比測量[17,39-41],建模仿真具有低成本、易重復的優勢,成為研究角反射體電磁散射特性的重要手段之一。建模仿真可分為理論建模仿真和電磁軟件仿真兩種主要方式。
(1) 理論建模仿真
基于理論建模仿真的電磁散射計算方法主要包括低頻數值算法和高頻近似算法。低頻數值算法可以根據麥克斯韋方程組獲得計算結果,通常具有較高的精度,如矩量法(Method of Moment,MoM)[42]、有限元法(Finite Element Method,FEM)[43]和時域有限差分法(Finite Difference Time-Domain,FDTD)[44]等。但是上述低頻數值算法計算過程復雜且難以求解大尺寸目標和高頻散射。
高頻近似算法是基于電磁學中的簡化模型或者假設對求解參數進行近似,從而提高計算效率并降低內存需求。研究人員分別將幾何光學法(Geometrical Optics,GO)[45]、物理光學法(Physical Optics,PO)[46-48]、迭代物理光學法(Iterative Physical Optics,IPO)[49]、幾何繞射理論(Geometrical Theory of Diffraction,GTD)[50]、物理繞射理論(Physical Theory of Diffraction,PTD)[51]和彈跳射線法(Shooting and Bouncing Rays,SBR)[52-54]等高頻近似算法用于角反射體的電磁散射計算。此外,研究人員嘗試將不同算法特別是性能互補的算法進行融合,相繼提出了基于GO-區域投影(Area Projection,AP)混合法[55-58]、PO-AP混合法[59,60]、SBRMoM混合法[61]、IPO-PTD混合法[62]和基于POSBR[63]混合法的角反射體電磁散射計算方法,有效提升了角反射體的電磁計算精度和計算效率。
在實際應用場景中,角反射體干擾漂浮于海面上,復雜海面與角反射體存在多次散射的耦合效應,這使得海面和角反射體的復合電磁散射建模成為需要解決的重要難題[34,36,64]。4路徑模型是模擬海面與目標之間多徑效應的經典模型[65]。文獻[66]利用PO算法和4路徑模型計算了海面與目標的復合總散射場,圖4為海面角反射體多路徑散射示意圖。路徑1為目標單獨的散射(根據目標結構考慮多次散射);路徑2為“雷達-海面-目標-雷達”的多次散射;路徑3為“雷達-目標-海面-雷達”的多次散射;路徑4為“雷達-海面-目標-海面-雷達”的多次散射。同時結合目標在海面的6自由度運動模型和對應參數下的海雜波,實現了海面目標動態回波仿真。在此基礎上,研究人員綜合分析了角反射體和艦船目標的時域、頻域和時頻域特性。文獻[67]提出了一種基于PO-SBR的復合電磁散射建模方法,有效提高了海面和角反射體復合電磁散射的計算效率。基于該方法,研究人員分析了雷達參數和海面環境對海面角反射體復合電磁散射特性的影響。但是頻域算法計算效率較低,而時域計算方法在寬頻段和瞬態計算中具有天然優勢。文獻[68]采用時域彈跳射線法(Time-Domain SBR,TDSBR)仿真了“海面-艦船-角反射體”復合模型的時域電磁散射特性。圖5為入射角為45°,方位角為0°,脈沖中心頻率為10 GHz,帶寬4 GHz的TDSBR時域回波仿真結果。場景中角反射體陣列沿航行方向排列于艦船后方。從圖5(a)可以看出,3個角反射體產生了3個離散的尖峰;艦船目標由于結構復雜,存在多個散射中心,因此其回波呈現為多峰。圖5(b)為寬頻帶RCS結果。可以看出,RCS隨頻率變化呈現較大起伏,且RCS主要來源于艦船和角反射體的貢獻。
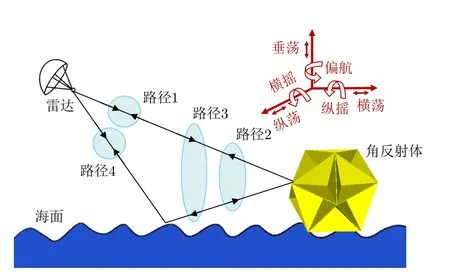
圖4 海面角反射體多路徑散射示意圖Fig.4 Schematic of multipath scattering from sea corner reflector
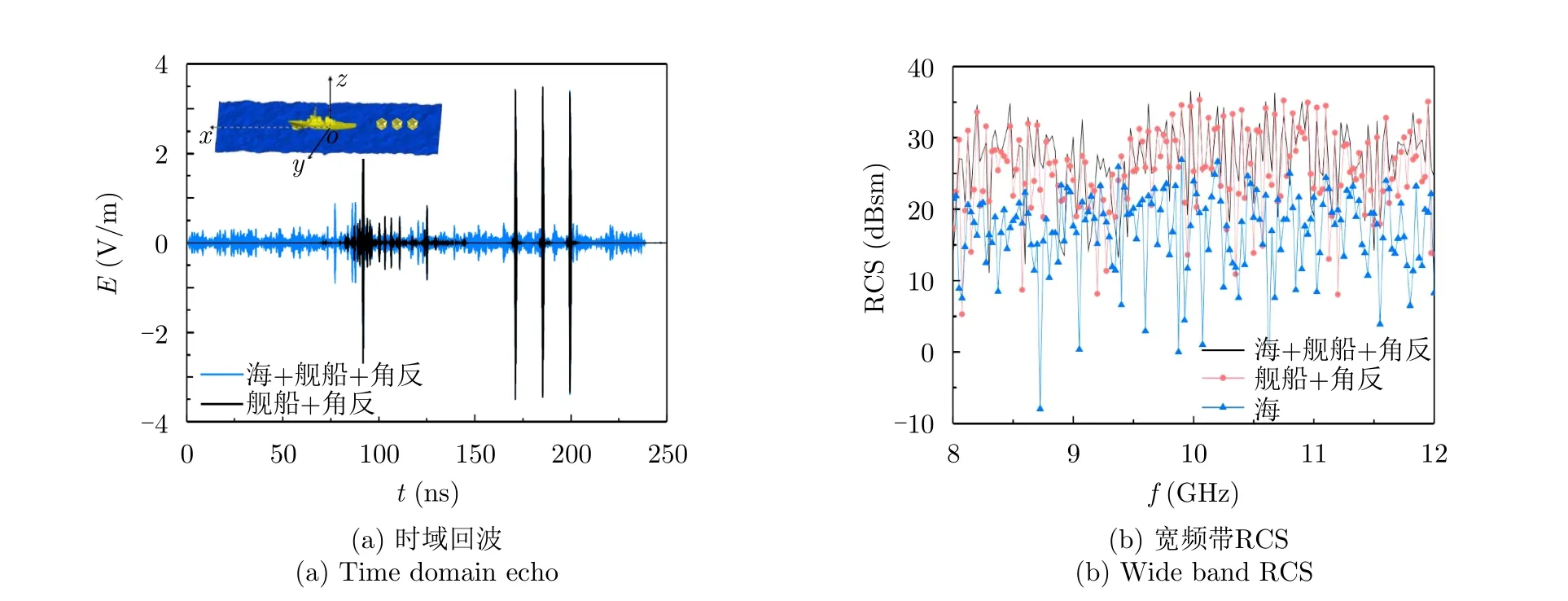
圖5 TDSBR時域回波仿真結果[68]Fig.5 Time domain echo simulation results by TDSBR[68]
(2) 電磁軟件仿真
XPATCH,FEKO,CST等電磁計算仿真軟件是獲取雷達目標全極化數據的有效手段[69-75]。基于電磁計算數據,研究人員開展了大量針對角反射體的電磁散射特性分析。文獻[69,76]仿真分析了制作偏差對三角形角反射體RCS的影響,為角反射體的生產加工和實際應用提供了指導。文獻[77]對二十面體角反射體的RCS進行統計分析,并驗證了Burr模型對二十面體角反射體RCS具有較好的擬合效果。圖6和圖7為八面體角反射體和二十面體角反射體全空域RCS電磁仿真結果。仿真頻率為10 GHz,俯仰角為0°~90°,方位角-45°~45°。可以看到,兩種角反射體的共極化通道的RCS明顯高于交叉極化通道。二十面體角反射體的共極化通道的RCS在整個空域內變化更為穩定,覆蓋范圍更廣。文獻[78-81]進一步研究了角反射體雙站RCS特性,揭示了雙基地雷達與角反射體之間的幾何關系對角反射體RCS的影響規律。文獻[82]結合海面生成模型構建了角反射體/艦船與不同海況海面的復合三維模型并進行電磁計算,復合模型示意圖如圖8所示。圖9和圖10為仿真頻率10 GHz時海面與角反射體復合模型的極化散射分布。從圖中可以看出,海況對海面與角反射體的復合散射影響比較明顯。隨著海況等級的增大,共極化通道的RCS起伏加快,交叉極化通道的RCS增大。
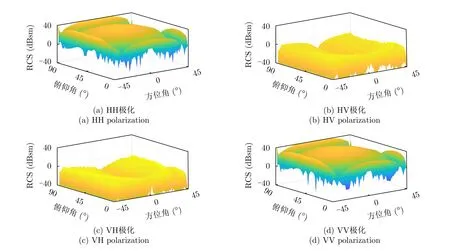
圖6 八面體角反射體RCS仿真結果Fig.6 RCS simulation results from octahedral corner reflector
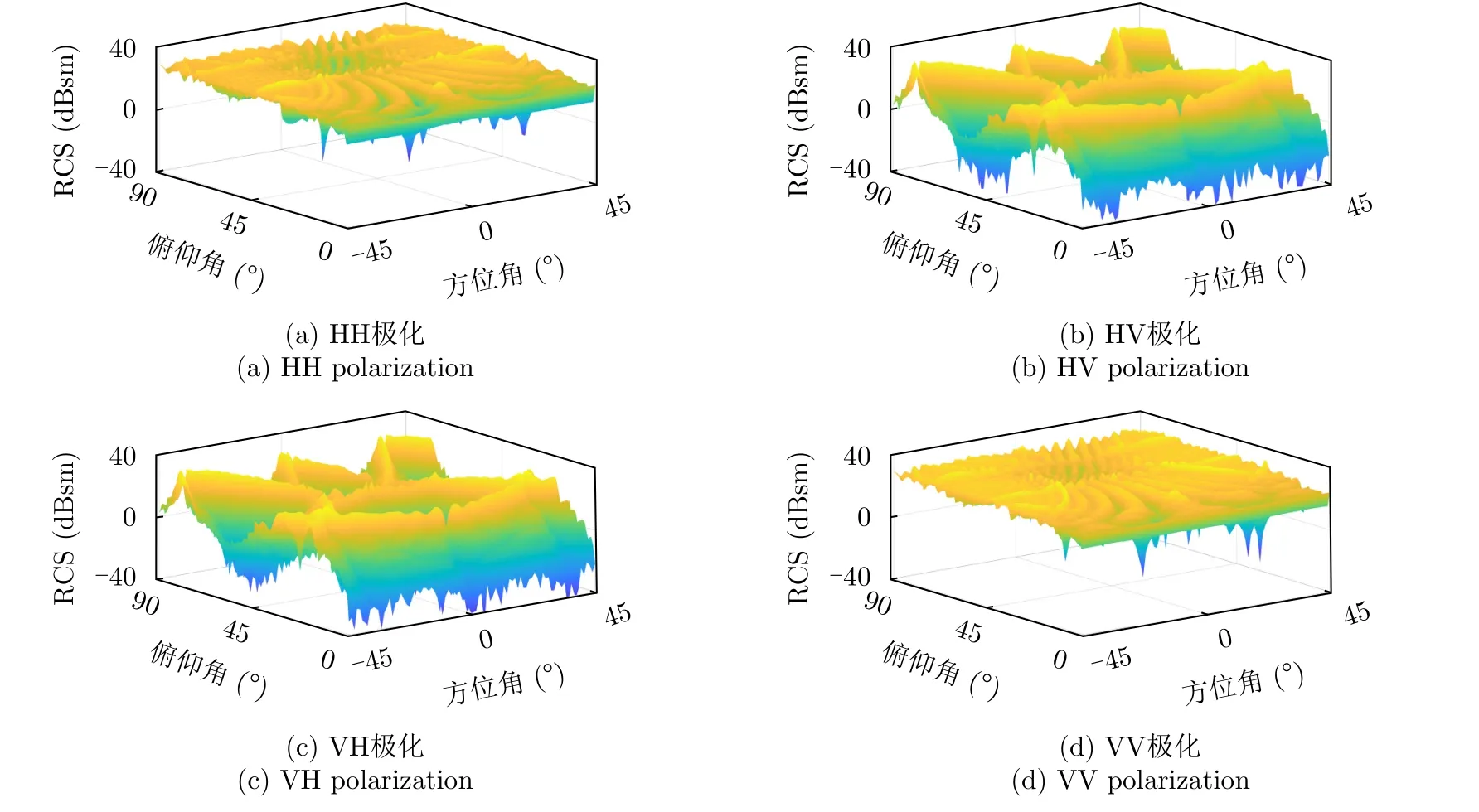
圖7 二十面體角反射體RCS仿真結果Fig.7 RCS simulation results from icosahedral corner reflector
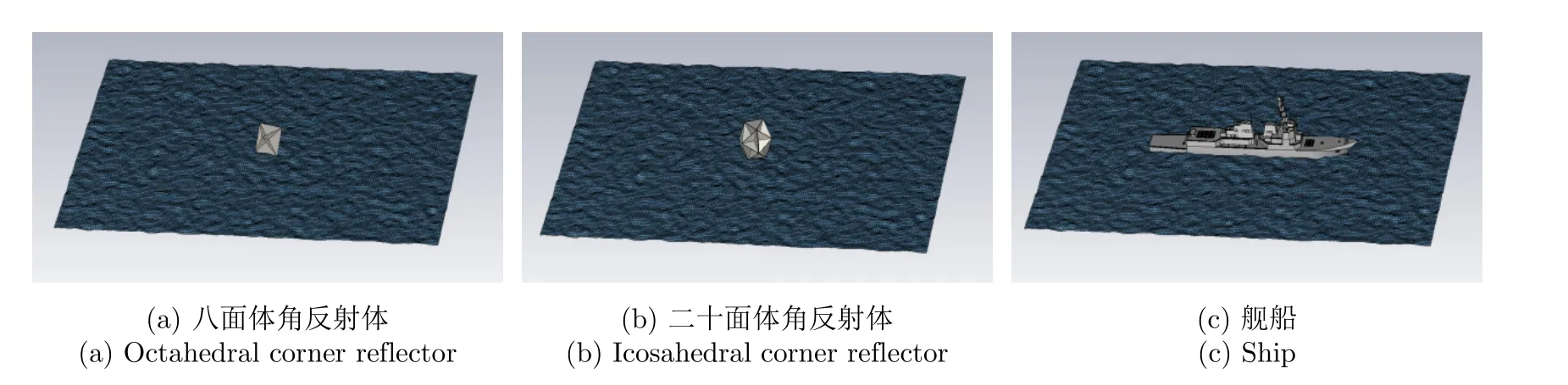
圖8 海面與目標的復合模型[82]Fig.8 Composite models from sea surface and target[82]
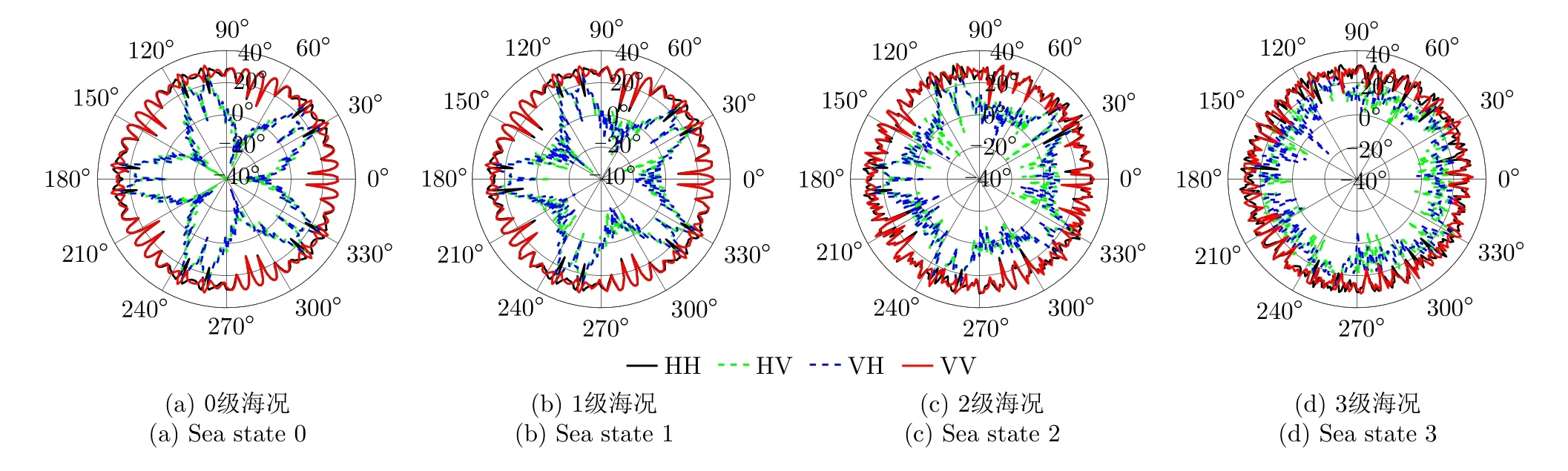
圖10 海面與二十面體角反射體復合模型的極化散射分布[82]Fig.10 Polarimetric scattering distribution of composite model from sea surface and icosahedral corner reflector[82]
基于電磁計算數據,還可以對“海面-艦船-角反射體”復合場景進行HRRP和二維成像仿真。圖11給出了“海面-艦船-角反射體”復合模型的HRRP仿真結果。其中,雷達入射俯仰角分別為30°,40°和50°,雷達方位角為20°,中心頻率10 GHz,帶寬100 MHz。沿船頭方向為方位角0°,垂直甲板向下為俯仰角0°。場景中設置了3個二十面體角反射體和一艘艦船,角反射體陣列沿艦船航行方向排列且與艦船相距一定間隔。海面大小300 m×200 m。從圖中可以看到,艦船目標HRRP與角反射體陣列都為離散的尖峰組成,兩者較為相似且難以區分。隨著俯仰角的變化,艦船目標HRRP各散射中心變化明顯,而角反射體變化較小。圖12給出了“海面-艦船-角反射體”復合縮比模型的二維成像仿真結果。其中雷達俯仰角為30°,中心頻率為10 GHz,距離和方位分辨率為0.15 m。場景中設置了6對二十面體角反射體和一艘艦船,海面大小15 m×10 m。圖12(a)和圖12(b)分別為雷達入射方位角0°和45°的二維成像結果。可以看到入射方位角為0°時,艦船和角反射體散射較強;而當入射方位角為45°時,海面散射強度增大,海面與目標耦合作用增強。
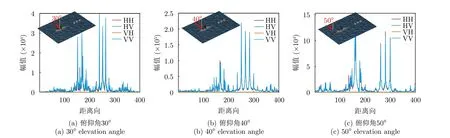
圖11 “海面-艦船-角反射體”復合模型的HRRP仿真結果Fig.11 HRRP simulation results of the ‘sea surface-ship-corner reflector’ composite model
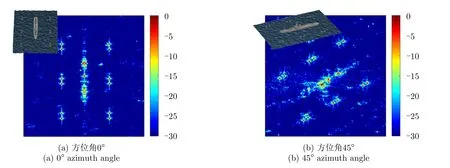
圖12 “海面-艦船-角反射體”復合模型的二維成像仿真結果Fig.12 2D imaging simulation results of the ‘sea surface-ship-corner reflector’ composite model
此外,針對當前角反射體數據樣本不足的問題,文獻[14]結合實測極化雷達數據和典型角反射體電磁計算數據,通過信號級成像疊加仿真生成了不同場景的極化雷達角反射體干擾仿真數據,其構建流程如圖13所示。電磁仿真計算為角反射體電磁散射特性分析與鑒別研究提供了豐富的數據樣本。
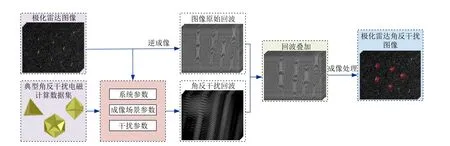
圖13 極化雷達角反射體干擾仿真數據構建流程Fig.13 Flowchart of polarimetric radar corner reflector jamming simulation data construction
4 海面角反射體雷達鑒別方法
海面角反射體雷達鑒別的常用方法是利用艦船目標和角反射體干擾的散射特性差異,人工提取出具有鑒別能力的特征,并利用分類器來確定干擾和目標類型。該類方法包括了基于HRRP特征的鑒別方法、基于運動特征的鑒別方法和基于極化特征的鑒別方法。隨著深度學習理論和方法的不斷發展與應用,基于數據驅動的深度學習方法能夠自動提取特征,且可以獲得更好的鑒別效果。目前,海面角反射體雷達鑒別方法大致分為基于特征提取的鑒別方法和基于深度學習的鑒別方法兩類。
4.1 基于特征提取的角反射體鑒別方法
(1) HRRP特征
雷達通過發射大帶寬信號,可以獲得目標距離上的高分辨率。HRRP可以反映目標的幾何形狀、尺寸大小、材料等信息[83]。由于艦船目標結構復雜,在電磁波照射下等效于多散射中心組成的連續擴展分布,其回波呈現為多峰。角反射體干擾等效于離散的點目標。通過提取HRRP的結構特征可以實現艦船目標和角反射體的有效辨識。受該思路啟發,文獻[84]基于強散射點包絡特征提出了連續統計跟蹤算法。通過連續統計相對最強散射點窗內高于閾值的單元數并與設定的單元數閾值進行比較,從而有效對抗角反射體質心干擾。文獻[38]對艦船和單個角反射體HRRP實測數據進行分析,并結合支持向量機(Support Vector Machine,SVM)分類器開展了鑒別實驗。針對角反射體陣列干擾,文獻[66]提取了散射中心數目、徑向尺寸和散射對稱性值等3個HRRP特征對角反射體陣列和艦船目標的可分性進行對比分析。圖14給出了上述3個特征在對海實測數據中的統計結果。數據中包含了角反射體陣列和一艘艦船,角反射體陣列由兩個充氣式二十面體角反射體組成。可以看到,艦船的散射中心數目、徑向尺寸和散射對稱性值都大于角反射體陣列,且都具有較好的可分性。文獻[85]提取了7個與目標物理結構密切相關的平移不變特征構建特征向量,用于艦船目標和角反射體陣列的鑒別。隨著壓縮感知技術的發展,文獻[86]利用稀疏字典學習對目標HRRP進行重構,提出一種基于重構誤差比值的角反射體鑒別方法。為便于研究人員參考,表1歸納了用于角反射體鑒別的HRRP特征。然而,由于HRRP敏感于雷達觀測角度,且隨著角反射體數量的增加,艦船與角反射體陣列在HRRP中的差異減小,進而導致上述基于HRRP特征的鑒別方法在實際角反射體陣列對抗應用中并不穩健。
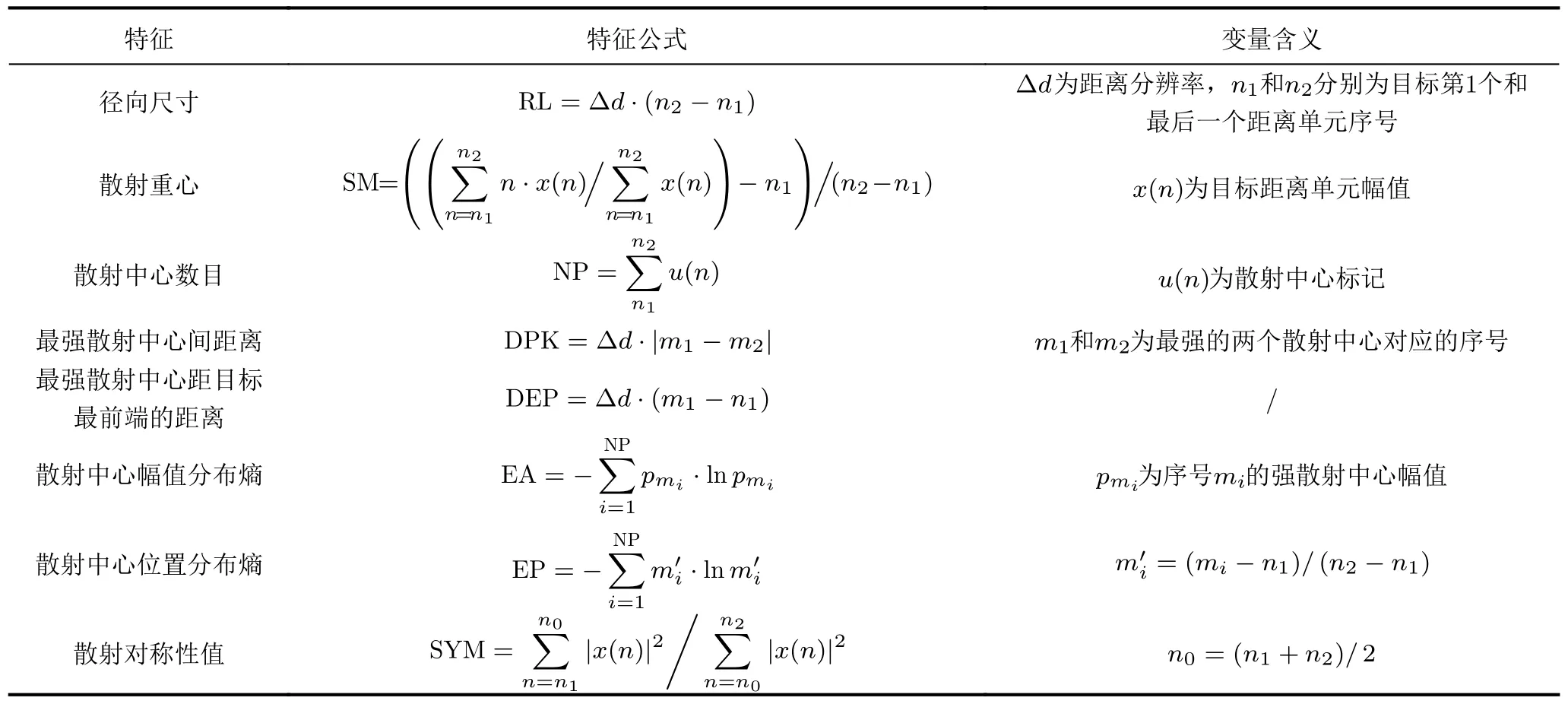
表1 用于角反射體雷達鑒別的HRRP特征歸納表Tab.1 Summary of HRRP features for corner reflector radar identification
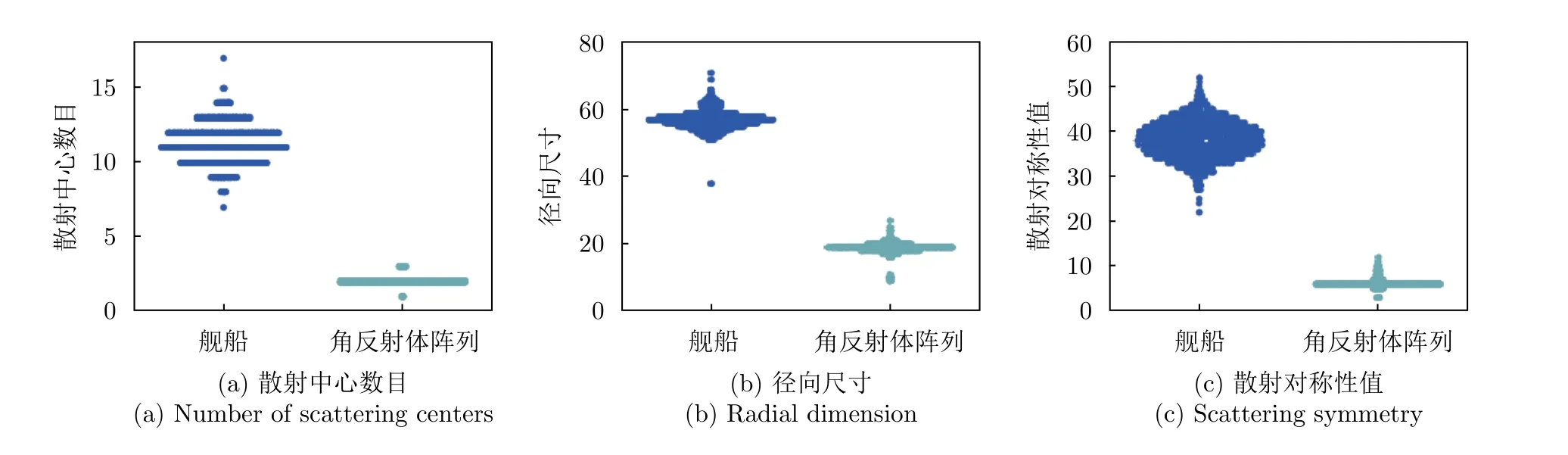
圖14 HRRP特征可分性Fig.14 Separability of HRRP features
(2) 運動特征
當投放角反射體后,艦船會進行合理的戰術機動。角反射體和艦船目標運動速度的差異會導致多普勒譜的變化。基于上述原理,文獻[66]對艦船目標和角反射體干擾的頻域功率譜特性進行了仿真分析,指出角反射體干擾的多普勒展寬小于艦船目標,并提取了功率譜變化區間特征用于角反射體鑒別。文獻[87]利用多普勒頻移計算雷達與目標的相對徑向速度,并提出了一種基于速度線性方程組總剩余范數的真假目標識別算法。文獻[84]綜合利用艦船和角反射體干擾的多普勒頻移和多普勒展寬的特性差異進行角反射體干擾鑒別,并在車載實測數據上進行了驗證,結果如圖15所示。然而上述方法只適用于艦船目標和角反射體存在速度差異的情況下。拖曳式角反射體的運動方向和速度與艦船目標近似相同,這種情況下上述方法將會失效[16]。
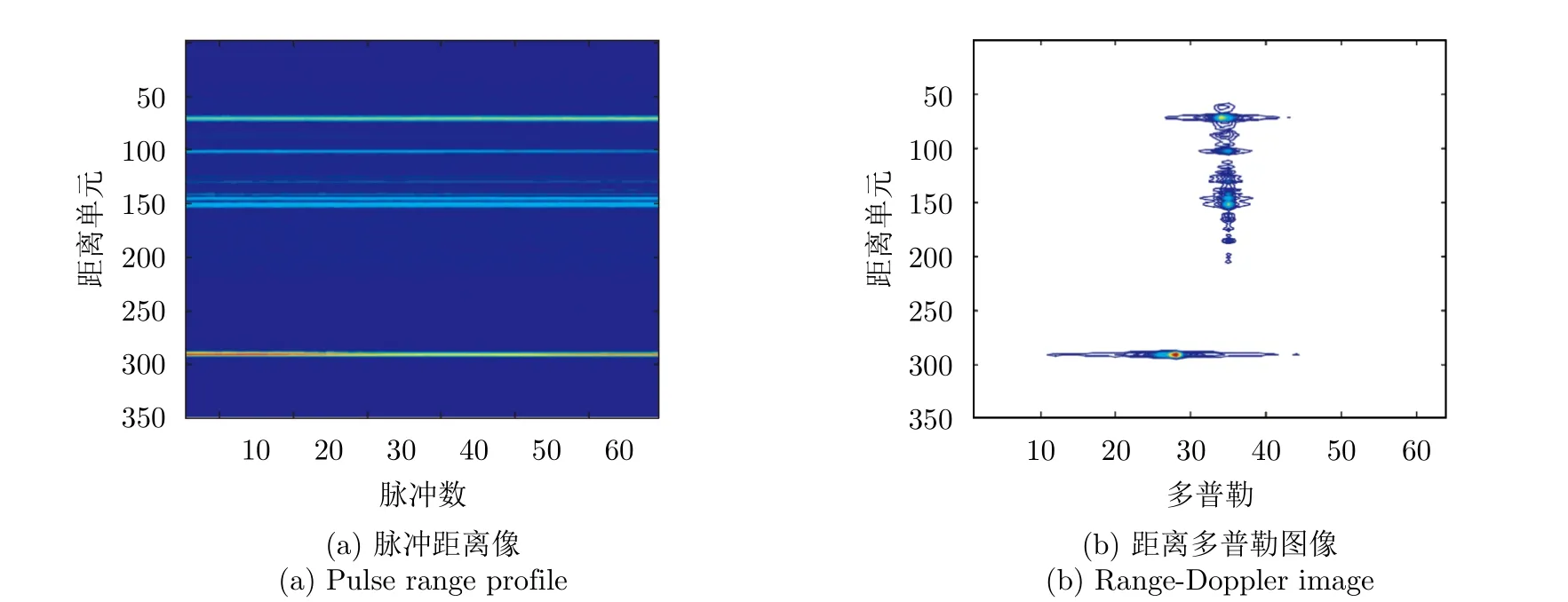
圖15 基于多普勒特性鑒別角反射體干擾[84]Fig.15 Corner reflector jamming identification based on Doppler characteristics[84]
此外,目標會隨海浪起伏伴有進動和擺動等形式的運動,加之艦船自身產生微動的零部件多,使艦船具有豐富的微動特性。微動會對電磁波頻率進行調制,從而引發不同目標回波具有不同的微多普勒[88,89]。通過短時傅里葉變換(Short-Time Fourier Transform,STFT)、平滑偽魏格納-維爾分布(Smoothed Pseudo Wigner-Ville Distribution,SPWVD)等時頻分析方法可以提取目標微動信息。文獻[66]對海面艦船和角反射體的時頻特性開展了研究,圖16為3級海況下仿真的艦船和角反射體時頻分布圖。仿真的雷達中心頻率為17 GHz,帶寬為100 MHz,脈沖重復周期為150 μs。可以看出,角反射體的微多普勒頻率隨時間變化幅度較大,且近似于正弦曲線;而艦船的微多普勒頻率隨時間變化幅度很小。兩者微多普勒的差異源于艦船和角反射體本身尺寸和重量的不同。相比于艦船,角反射體隨海浪起伏較大且起伏速度快。文獻[90]基于X波段雷達導引頭實測數據開展分析并得到了相同的特性結果。由于目標的微動特征能反映目標結構、尺寸等內在屬性,且測量不受雷達信號帶寬限制[88],因此微動特征可以作為角反射體干擾鑒別的又一重要特征參數。
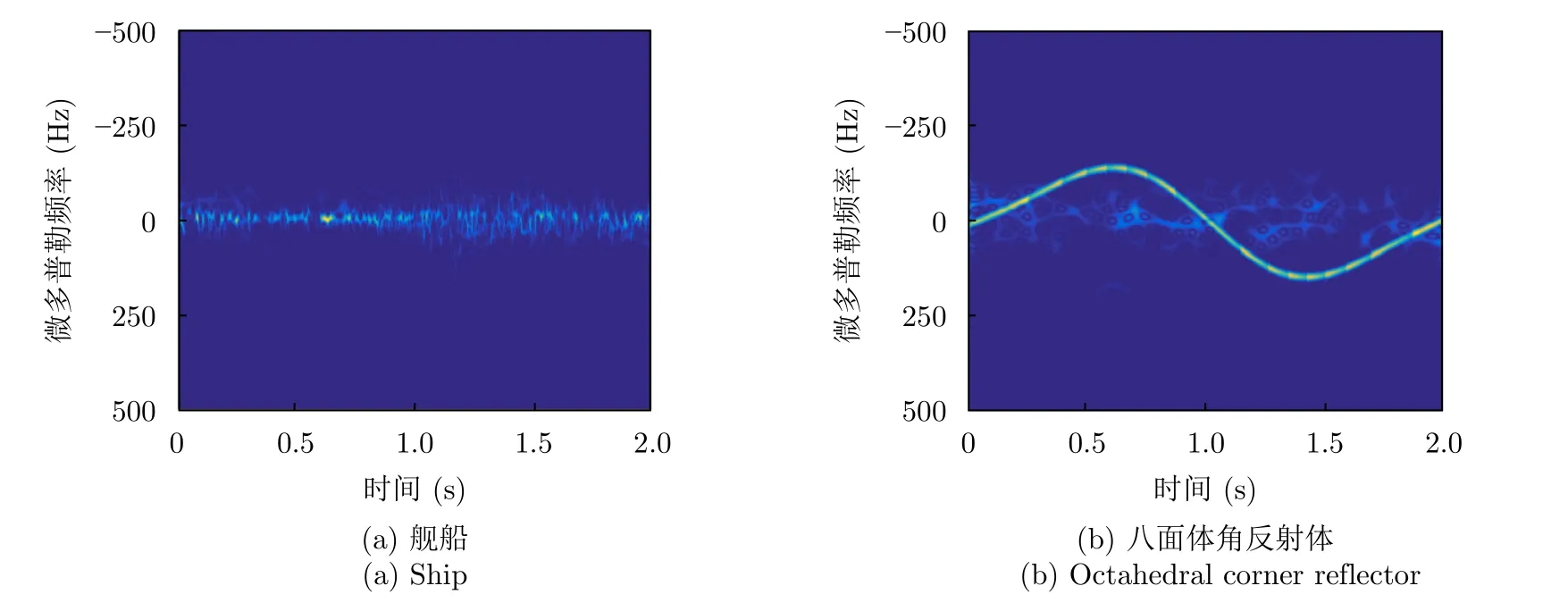
圖16 艦船和角反射體時頻分布圖[66]Fig.16 Time-frequency distribution of ship and corner reflector[66]
文獻[66]提取出用于度量瞬時微多普勒頻率震蕩幅度的瞬時微多普勒頻率全變差:
其中,N為蒙特卡羅實驗次數,fN(n) 為第N次實驗第n時刻的微多普勒頻率。
文獻[91]結合海況等級和角反射體載體的水動力系數,構建了不同海況下海面艦船目標和角反射體的運動仿真模型。通過對目標回波的微多普勒譜進行分析,提取出微多普勒主頻率周期特征[92]:
其中,MD(d)為 微多普勒譜,D為傅里葉變換的采樣點數。MF表征了目標微多普勒的主頻率分量,反映了目標的固有諧振頻率大小。艦船目標由于尺寸和重量較大,擺動幅度小于角反射體,故二者的微多普勒主頻率周期特征存在差異。通過設定鑒別閾值可有效區分艦船和角反射體干擾,鑒別結果如圖17所示。可以看出,在信噪比大于0 dB的條件下,角反射體干擾的正確鑒別率大于95%。
除上述特征外,文獻[37]還從目標回波的微多普勒譜中提取出時頻譜熵和微多普勒半周期頻差最大值用于描述目標的時頻特性:
其中,ρ(tm,f)為 微多普勒譜密度,f(tm)為瞬時頻率值,為周期頻差平均值。
基于MF,EF和DF 3種微多普勒特征,研究人員提出了一種結合三參數的角反射體干擾鑒別方法[37]。然而,基于微多普勒特征的角反射體干擾鑒別方法受海面強雜波與目標運動影響較大,對目標微多普勒的觀測本身需要的條件也非常苛刻,可能導致實際鑒別效果有限。
(3) 極化特征
極化是電磁波的本質屬性,是幅度、頻率、相位外又一可資利用的重要信息。雷達目標具有變極化效應,即目標回波的極化狀態相對于入射波會發生改變,其與目標的姿態、尺寸、結構、材料等物理屬性密切相關。在水平垂直極化基(H,V)下,極化雷達獲取的目標全極化信息可以由極化散射矩陣表征:
其中,SHV表示垂直極化發射、水平極化接收的復散射系數,矩陣中其他3個元素可類似定義。極化信息的處理和利用對提升雷達導引頭的探測能力具有極大潛力。
極化目標分解是目標極化散射建模與解譯的主流理論工具[93-95]。相干極化目標分解通常被用于人造目標解譯,代表性方法有Pauli分解[96]、Krogager分解[97]和Cameron分解[98]。由于幾何結構上具有顯著不同的差異,艦船和角反射體具有不同的極化散射機理。角反射體主要以奇次散射為主,而艦船目標主要以偶次散射為主,且包含表面散射、體散射、螺旋散射等多種散射機理。通過分解得到的極化參數可以用來區分艦船目標和角反射體。基于上述原理,文獻[99,100]利用Krogager分解特征開展了角反射體干擾鑒別。考慮到海雜波對目極化散射解譯的影響,文獻[101]優化了艦船的偶次散射模型和角反射體的奇次散射模型,并結合極化相似性參數實現了對角反射體和艦船的有效區分。然而,單獨利用極化信息難以全面反映目標的散射特性,文獻[102]利用4個HRRP特征和2個極化特征實現了雙極化雷達的角反射體鑒別。文獻[103]提出一種基于歸一化互信息的全局最優特征選擇算法,從39個全極化HRRP特征中優選出辨別力強、冗余度低的特征。圖18為利用K最近鄰(K-Nearest Neighbor,K-NN)分類器輸出的不同特征集尺寸下的目標分類正確率。每條曲線表示不同方位角度域的目標數據。結果表明特征子集尺寸為25時可以達到最高的分類正確率。此外,針對Krogager分解受噪聲影響大的問題,文獻[104]提出了一種基于主極化的角反射體分解方法,可以在雜波中準確得到角反射體的奇次散射和偶次散射系數。在此基礎上,通過構建描述時空特性的均方誤差參數,提出了一種基于空-時-極化聯合域的角反射體鑒別方法。但是,雷達目標散射響應具有很強的方位敏感性,極化目標分解方法存在散射機理解譯失真問題[93],其鑒別量性能不夠穩健。
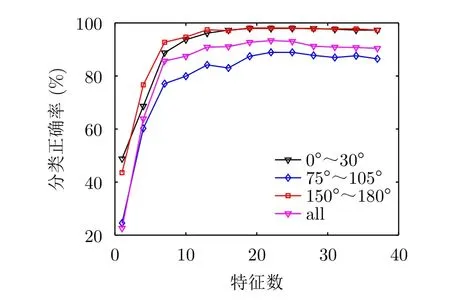
圖18 不同特征集尺寸下的分類正確率[103]Fig.18 Classification accuracy with different feature set sizes[103]
為了緩解雷達目標散射響應的方位敏感性,研究人員將極化旋轉不變特征(Polarimetric Roll-Invariant,PRI)用于角反射體鑒別[105-107],其在繞雷達視線上具有與目標方向無關的重要特性[108]。文獻[109]利用Cloude-Pottier極化分解和極化旋轉不變特征構建特征向量,并結合SVM實現了較好的角反射體鑒別效果。但是部分極化旋轉不變特征敏感于目標尺寸,進而會影響角反射體鑒別效果。
雷達目標的后向散射敏感于目標姿態與雷達視線的相對幾何關系,這種散射多樣性中也蘊含著豐富的極化散射信息,文獻[110,111]提出一種在繞雷達視線旋轉域解譯目標散射機理的新思路,建立了極化旋轉域解譯理論,用于挖掘目標散射多樣性中的隱含信息,近年來也得到研究人員的高度重視[112-117]。文獻[82,118]利用極化旋轉域相關方向圖解譯工具揭示了全方位角度下八面體角反射體和二十面體角反射體的極化旋轉域特性演化規律。圖19給出了角反射體與艦船的極化旋轉域特征流形圖。發現在整個俯仰角和方位角范圍內,角反射體均有大量滿足旋轉不變性的區域;而艦船目標通常結構更為復雜,不具備幾何結構的中心對稱性,因此不具有極化旋轉不變性。這給角反射體的準確鑒別提供了新途徑。基于此,研究人員開展了角反射體干擾的極化旋轉域鑒別研究[14,82,119-121]。通過優選高辨識度的極化鑒別特征量,提出了基于極化相關方向圖特征(Polarimetric Correlation Pattern,PCP)的角反射體干擾鑒別方法,并利用極化雷達角反射體干擾仿真數據開展對比實驗,鑒別結果如圖20所示。圖中綠色方框代表正確鑒別的艦船,紅色方框代表正確鑒別的角反射體,黃色方框代表錯誤鑒別。對比結果驗證了PCP方法優勢明顯。此外,最近有研究表明,通過極化域變焦處理調控雷達收發極化,可以有效提升雷達信息獲取能力,從而增強角反射體干擾鑒別的能力[122,123]。

圖20 不同角反射體鑒別方法與PCP的對比結果[14]Fig.20 Comparison results among different corner reflector identifier with PCP[14]
表2歸納了用于角反射體干擾鑒別的極化特征,以便于研究人員參考。為了定量評估上述極化特征對角反射體干擾的鑒別性能,利用構建的極化雷達角反射體干擾仿真數據開展分析。一般來講,信干比(Signal-to-Jamming Ratio,SJR)越大表示該極化特征對于角反射體干擾的抑制效果越好,能獲得更好的鑒別性能。分別選取10個艦船樣本和10個角反射體樣本,得到的極化特征信干比均值如圖21所示。可以看到,極化相關起伏度、極化相關對比度和極化相關特征反熵的信干比最高,在區分艦船和角反射體方面具有顯著優勢。
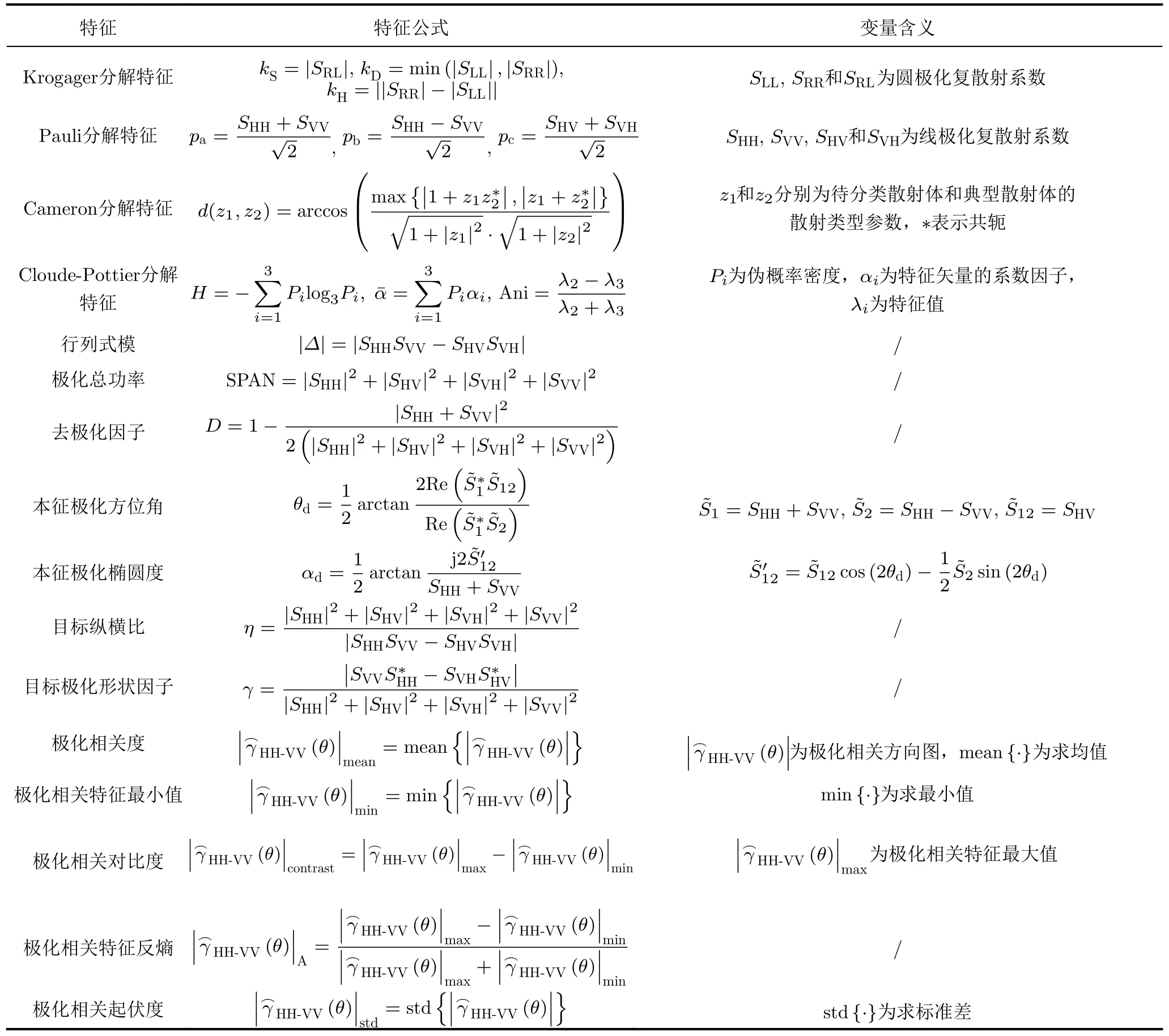
表2 用于角反射體雷達鑒別的極化特征歸納表Tab.2 Summary of polarimetric features for corner reflector radar identification
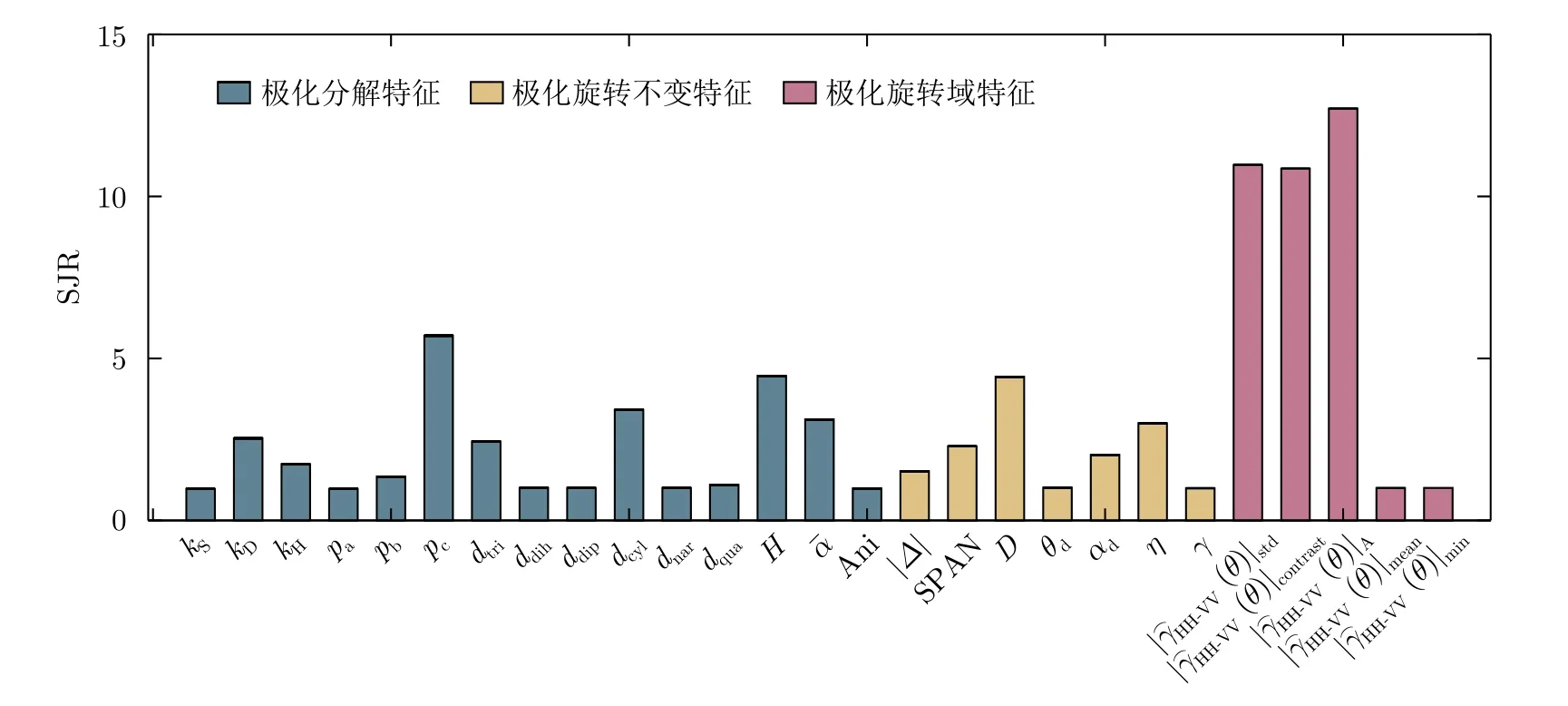
圖21 艦船和角反射體的極化特征信干比Fig.21 SJR values of the polarimetric features of ships and corner reflectors
4.2 基于深度學習的角反射體鑒別方法
近年來,深度學習方法在光學目標檢測和識別領域取得了巨大的成功,其核心是通過層次化的特征提取結構(即深層結構)來表征原始數據。相較于傳統的人工特征提取方法,深度學習方法具有自動特征提取和深度數據挖掘的優點,能夠克服手動設計特征和分類器帶來的局限性,同時在目標分類和識別任務中能夠獲得更高的精度[124-126]。研究人員也將深度學習推廣應用于角反射體干擾雷達鑒別研究。文獻[127]提出了一種適用于浮空式角反射體識別的深度神經網絡(Deep Neural Network,DNN)優化模型,采用mini-batch梯度下降法和Adam優化算法分別提高模型訓練效率和降低異常樣本子集的干擾,同時引入L2正則化和隨機Dropout方法提高網絡在驗證集上的泛化能力,鑒別效果明顯。文獻[128]針對實時性和穩定性要求較高的角反射體干擾鑒別場景,提出一種基于極限學習機(Extreme Learning Machine,ELM)的角反射體干擾鑒別方法,通過挖掘目標HRRP的隱含相關性從而克服方位敏感問題。相較于深度置信網絡(Deep Belief Network,DBN)和SVM分類器,該方法能夠獲得更好的鑒別性能,對比結果如圖22所示。
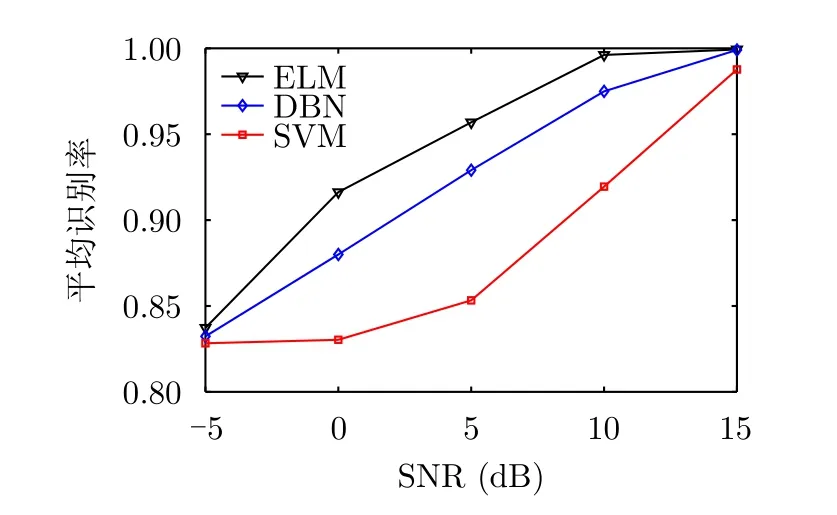
圖22 不同分類器與ELM的對比結果[128]Fig.22 Comparison results between different classifiers and ELM[128]
除此之外,理論研究表明,分類器聯合能夠提高基分類器的泛化能力,由精確且互補的分類器組成的集成分類器將優于性能最好的基分類器[10]。文獻[106]采用加權平均法聯合極限梯度提升(eXtreme Gradient Boosting,XGB)分類器和長短期記憶(Long Short-Term Memory,LSTM)分類器。這種結合方式避免了單一算法陷入局部最小值,從而獲得較高的角反射體鑒別率。文獻[85]通過集成學習的思想,提出了一種異構分類器聯合的角反射體目標雷達識別方法,利用LM-BP (Levenberg Marquardt-Back Propagation)神經網絡作為聯合器對基分類器的輸出進行融合。為了進一步提高目標識別的泛化能力,文獻[129]利用元學習(META-Learning)取代傳統的分類器融合策略,對基分類器的結果進行“再學習”,從而使元分類器的分類精度優于所有基分類器。集成間隔與基分類器的多樣性密切相關,傳統集成間隔往往忽視了樣本權值、分類器權值等影響集成性能的重要因素。針對這一問題,文獻[130]提出一種基于集成間隔優化的靜態選擇集成算法(Static Selection Ensemble based on Margin Optimization,SSE-MO)用于角反射體鑒別。為了進一步提高復雜干擾環境下對海雷達目標識別的泛化性和實時性,文獻[131]提出一種基于聚類和隨機參考分類器(K-Medoids Random Reference Classifier,KMRRC)的角反射體目標雷達識別算法。但是原始基分類器數目較多且個體精度良莠不齊,往往會影響KMRRC算法的效率和性能。針對這一問題,文獻[10]提出一種綜合靜態優化和動態選擇的混合分類器集成選擇算法(Optimization and Dynamic Selection,ODS)。圖23給出了上述4種集成算法對于6種艦船和角反射體陣列仿真數據的分類結果,可以看出ODS方法鑒別性能最好。然而,有限的學習樣本和難解釋性嚴重制約著深度學習方法的實際應用。結合目標散射機理解譯和極化特征挖掘的專家知識驅動網絡模型優化,構建物理可解釋深度學習是提高泛化性的可行途徑[114]。文獻[132]利用Pauli極化分解特征驅動BP神經網絡,從而達到了較好的角反射體干擾鑒別性能。
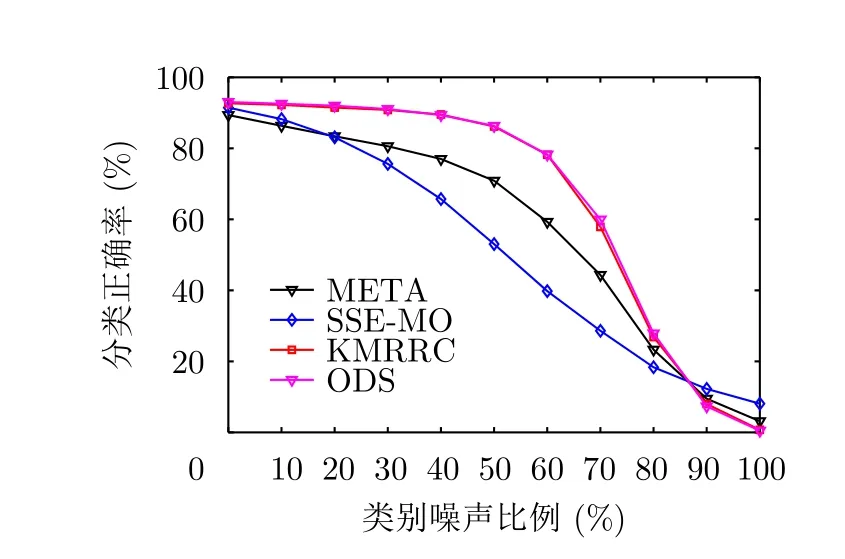
圖23 4種集成算法分類結果對比[10]Fig.23 Comparison of classification results from four ensemble algorithms[10]
4.3 其他方法
除上述主流方法外,研究人員還利用新體制雷達或戰術策略開展角反射體干擾雷達鑒別研究。文獻[133]基于認知雷達的思想提出了雷達波形分集抗角反射體干擾的方法。其核心思想是通過脈內混合調制實現雷達波形在時間上的分集,并利用信息距離最大化的準則選擇能夠最大限度區分艦船目標與角反射體的波形,從而實現抗角反射體干擾的目的。多體制復合制導是當前精確制導技術發展的重要方向之一,復合制導能夠充分利用多種制導模式的優點,實現對目標的精確捕獲和跟蹤[134,135]。由于艦船上存在電子裝備和動力系統等熱輻射源,而角反射體作為無源干擾,一般沒有熱輻射特征,因此基于該特點可利用雷達/紅外雙模制導技術對抗角反射體干擾[16,136,137]。此外,還可采用包括多平臺多彈齊射、多種反艦導彈齊射和真假導彈次序攻擊等戰術策略,提升反艦導彈的角反射體鑒別能力[4,16,138]。
本節詳細梳理了角反射體雷達鑒別方法的技術途徑及存在的問題,為了便于不同鑒別方法的比較,表3總結了各類方法的適用場景和優缺點。
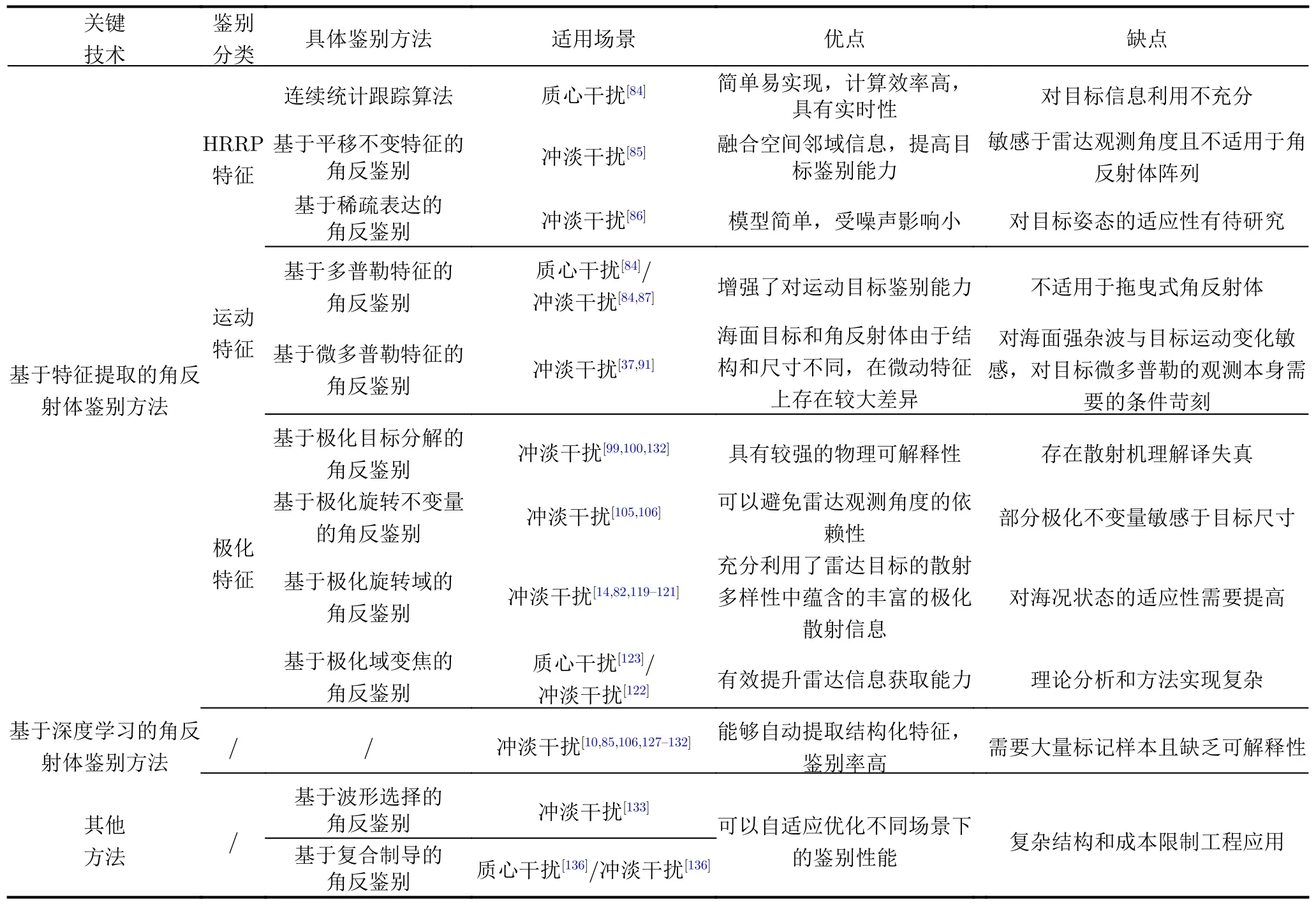
表3 角反射體雷達鑒別方法適用場景和優缺點總結Tab.3 Applicable scenarios and pros &cons summary of corner reflector radar identification
5 海面角反射體雷達鑒別研究展望
近年來,隨著海戰場日趨復雜的電磁環境,如何實現角反射體的高效鑒別仍是一大挑戰。面向海戰場射頻制導攻擊重大需求,以下方面仍需展開深入研究:
(1) 復雜場景下角反射體電磁散射特性研究
在實際應用場景中,充氣式角反射體漂浮于隨機時變的海面上,海洋表面包括毛細波、折浪、碎浪、泡沫等精細結構。海浪復雜多變的幾何形態及其與電磁波的復雜相互作用機理是當前復合電磁散射建模需要解決的重要難題。此外,充氣式角反射體是由復合材料、介質材料和金屬涂層等組成,需要構建高置信目標電磁模型,研究不同材料和結構對電磁散射特性的影響。同時還需考慮艦載/舷外有源誘餌、箔條等多種干擾的影響,為以戰場態勢感知為特點的角反射體對抗策略提供理論基礎。
(2) 角反射體實驗研究與數據集構建
角反射體雷達數據資料的匱乏是制約角反射體雷達鑒別技術發展的重要原因。相比暗室縮比測量和電磁計算仿真,外場測量是獲取目標電磁散射特性手段更直接、數據更真實的途徑。但是由于實驗測量成本昂貴、數據獲取難度高,目前針對角反射體干擾與復雜海上環境的復合電磁散射的外場測量實驗相對較少。因此,開展外場實驗方案設計獲取實驗數據,并結合電磁計算仿真,構建實測數據與仿真數據的融合數據庫,能夠有效支撐角反射體干擾雷達鑒別技術的理論發展和應用驗證。
(3) 角反射體高辨識度特征提取
雷達回波中蘊含著目標豐富的散射信息,利用時域、頻域、空域及極化域等不同變化域和不同層面的目標散射信息,能夠深入揭示角反射體電磁散射特性及演化規律,提取和設計適用于角反射體鑒別的高辨識度特征。此外,有限維度的信息難以反映目標真實的散射信息,應結合特征優選構建深層次多域多維特征集,增強干擾與目標在特征空間中的可分性,實現角反射體的準確鑒別。
(4) 角反射體鑒別與人工智能
隨著深度學習技術的日趨成熟,結合深度學習技術可為角反射體的智能識別提供可行途徑。然而受限于有效樣本的數目和樣本集構建的昂貴代價,在光學領域獲得成功應用的深度學習模型難以直接應用于成像雷達領域。如何在訓練樣本有限的情況下,利用深度學習對角反射體進行智能識別,同時保持良好的泛化性能,是目前面臨的一個重要挑戰。傳統的目標電磁散射機理解譯方法具有清晰的物理可解釋性。結合目標散射精細化解譯專家知識,開展融合物理模型機理的深度學習模型設計,有望為小樣本條件下雷達目標分類識別提供可行途徑,具有重要的科學和應用價值。
(5) 新型角反射體與雷達鑒別
常規角反射體一旦加工完成,其電磁特性就很難改變,且反射性能依賴于入射波長,因此干擾效果受到限制。隨著電子技術的發展,精確制導武器的突防能力和打擊精度不斷提升。為制約導彈作戰功效發揮,角反射體在結構[139-142]和材料[143-147]等方面也在不斷創新和發展,特性靈活可調的新型角反射體是未來角反射體裝備的發展趨勢。與此同時,也將涌現出諸如新型角反射體的特性與應用、新型角反射體雷達對抗技術等許多新的值得深入探索的前沿性、基礎性科學問題,需要開展更深入的理論創新和實驗研究。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
