基于混沌粒子群算法的壓電微納平臺遲滯模型參數(shù)辨別
2023-09-12 07:26:14趙一炘
探測與控制學(xué)報(bào) 2023年4期
趙一炘,須 穎,安 冬
(沈陽建筑大學(xué)機(jī)械工程學(xué)院,遼寧 沈陽 110168)
0 引言
壓電陶瓷作為一種智能材料,經(jīng)過多年的發(fā)展,已經(jīng)在工業(yè)制造上獲得了廣泛的應(yīng)用[1]。目前,以壓電材料作為驅(qū)動元件的微納定位平臺已經(jīng)在顯微鏡、納米制造系統(tǒng)中廣泛應(yīng)用并取得了良好的效果[2]。我國目前在粗定位技術(shù)上已經(jīng)比較成熟,但是在精確定位技術(shù)上仍然還有許多不足。因此,對壓電微納平臺的深入研究,對我國精密運(yùn)動控制以及精密儀器的工業(yè)制造具有重要意義。
壓電微納系統(tǒng)的驅(qū)動設(shè)備是壓電陶瓷驅(qū)動器,其優(yōu)勢在于輸出位移的高穩(wěn)定性以及良好的重復(fù)性,能適應(yīng)高納米級動態(tài)分辨率的技術(shù)要求。然而,由于壓電陶瓷的材料特性,驅(qū)動器的電壓輸入與位移輸出間存在明顯且較為復(fù)雜的遲滯非線性現(xiàn)象[3-4]。由于Bouc-Wen模型具有模擬各種遲滯行為的能力,被廣泛應(yīng)用于模擬具有遲滯特性的結(jié)構(gòu)材料與系統(tǒng)中[5-7]。
可由于實(shí)際的遲滯回線通常是不對稱的,而標(biāo)準(zhǔn)Bouc-Wen模型是近似中心對稱模型,所以對遲滯曲線的描述并不完全準(zhǔn)確。為了解決這個(gè)問題,文獻(xiàn)[8]提出了一種歸一化Bouc-Wen模型,利用對內(nèi)部的遲滯變量進(jìn)行歸一化處理去消除冗余參數(shù)。文獻(xiàn)[9]改變原模型的單變量形式,提出了一種新的多變量滯后Bouc-Wen模型。雖然他們都對Bouc-Wen模型進(jìn)行了相應(yīng)的改進(jìn),但仍然無法達(dá)到非常精確地對遲滯現(xiàn)象進(jìn)行描述。本文通過增加一個(gè)遲滯非線性項(xiàng),將原對稱模型改為非對稱模型,添加初值補(bǔ)償因數(shù),更加真實(shí)地對系統(tǒng)的初始情況進(jìn)行反映。改進(jìn)后的Bouc-Wen模型可更為準(zhǔn)確地描述壓電微納平臺的遲滯情況。
遲滯模型的精確程度決定了能否準(zhǔn)確地對遲滯現(xiàn)象進(jìn)行描述,遲滯模型的參數(shù)較多會使得辨識出來的參數(shù)精確度不高,所以要尋找簡單有效的方法對遲滯模型的參數(shù)進(jìn)行識別[10]。本文通過使用粒子群算法對改進(jìn)后的遲滯模型進(jìn)行參數(shù)識別。但由于傳統(tǒng)粒子群算法,容易陷入局部極值。對多參數(shù)對象辨識時(shí),會出現(xiàn)效率低、模型準(zhǔn)確率差等問題。為解決此問題,本文引入混沌映射,選用Logistic混沌作為混沌粒子群優(yōu)化算法中的慣性權(quán)重,來增強(qiáng)粒子群的優(yōu)化能力,實(shí)現(xiàn)更為準(zhǔn)確的遲滯曲線擬合。
1 壓電微納平臺遲滯模型
1.1 平臺原理與遲滯機(jī)理
壓電微納平臺主要是由壓電驅(qū)動器和機(jī)械結(jié)構(gòu)平臺兩部分構(gòu)成,主要利用壓電陶瓷的逆壓電效應(yīng)。當(dāng)電場作用于介質(zhì)極化方向時(shí),在一定的方向上會發(fā)生壓力或變形,外加電場消失時(shí)變形和應(yīng)力也會隨之恢復(fù),這一過程將電能轉(zhuǎn)化為機(jī)械能。壓電微納平臺能夠引起位移變化正是利用了壓電材料的逆壓電效應(yīng)。
在外加驅(qū)動電壓的控制下,壓電陶瓷的位移輸出未達(dá)到理想的線性關(guān)系,表現(xiàn)為升壓階段與降壓階段曲線并不是斜率恒定的曲線,且輸入與輸出曲線不重合,存在明顯的位移差,這種現(xiàn)象就稱為壓電陶瓷的遲滯現(xiàn)象。
1.2 Bouc-Wen遲滯模型
Bouc-Wen模型的數(shù)學(xué)表達(dá)式簡單,模型參數(shù)數(shù)量不多,當(dāng)對模型參數(shù)進(jìn)行調(diào)整時(shí)能夠得到各種遲滯環(huán)。這些遲滯環(huán)可以描述出大部分遲滯特性,因此在對遲滯特性進(jìn)行擬合時(shí)常選用Bouc-Wen模型。Bouc-Wen模型是一種典型的由微分方程式所建立,來表示輸出信號隨輸入信號的變化關(guān)系的模型。本文主要對Bouc-Wen模型進(jìn)行研究。具有遲滯特性的壓電陶瓷執(zhí)行器可以用Bouc-Wen模型[11]表示為
(1)
式(1)中,h表示Bouc-Wen遲滯模型的遲滯部分,參數(shù)k0和k1為權(quán)重系數(shù),A、B、C、n為Bouc-Wen遲滯模型的用于描述遲滯特性的參數(shù),t為時(shí)間,用微分方程來表征輸出位移y隨輸入電壓u的變化關(guān)系。
雖然傳統(tǒng)Bouc-Wen模型可詳細(xì)描述出對稱的遲滯現(xiàn)象,但是實(shí)際的遲滯回線通常是不對稱的。所以本文根據(jù)壓電微納定位平臺實(shí)際情況,對傳統(tǒng)的Bouc-Wen模型進(jìn)行改進(jìn)。
2 改進(jìn)Bouc-Wen遲滯模型參數(shù)辨識
2.1 改進(jìn)Bouc-Wen遲滯模型
由于傳統(tǒng)Bouc-Wen模型是近似中心對稱模型,而實(shí)際系統(tǒng)所形成的遲滯曲線通常是不對稱的。并且傳統(tǒng)Bouc-Wen模型不能反映系統(tǒng)真實(shí)的初始情況,所以需要對標(biāo)準(zhǔn)Bouc-Wen模型進(jìn)行改進(jìn)。
改進(jìn)的方法是在標(biāo)準(zhǔn)Bouc-Wen模型的基礎(chǔ)上,首先增加一個(gè)遲滯非線性項(xiàng)φ,以便于將原對稱模型改為非對稱模型。然后增加一個(gè)初值補(bǔ)償因數(shù)d,更加真實(shí)地對系統(tǒng)的初始情況進(jìn)行反映。改進(jìn)的Bouc-Wen模型如下:
(2)
式(2)中,h表示Bouc-Wen模型改進(jìn)部分,遲滯特性參數(shù)分別為α、φ1、φ2、φ3、φ4,d為初值補(bǔ)償因數(shù)。
為了驗(yàn)證改進(jìn)Bouc-Wen模型可以有效地模擬壓電微納平臺遲滯回線情況,采用頻率為1 Hz的正弦波作為輸入,采用粒子群算法分別對傳統(tǒng)Bouc-Wen遲滯模型和改進(jìn)Bouc-Wen模型進(jìn)行參數(shù)辨識,得出電壓與位移曲線。圖1為標(biāo)準(zhǔn)Bouc-Wen遲滯模型擬合情況,圖2為改進(jìn)Bouc-Wen遲滯模型擬合情況。

圖1 標(biāo)準(zhǔn)Bouc-Wen遲滯模型擬合情況

圖2 改進(jìn)Bouc-Wen遲滯模型擬合情況
從圖1、圖2中可以看出標(biāo)準(zhǔn)Bouc-Wen遲滯模型可以基本描述壓電微納定位平臺的遲滯現(xiàn)象,但是擬合情況仍存有較大誤差。改進(jìn)后的Bouc-Wen遲滯模型則明顯可以更好地模擬真實(shí)遲滯曲線,說明本文的改進(jìn)Bouc-Wen模型比原模型對遲滯情況的描述更為精準(zhǔn)。
2.2 粒子群算法
粒子群算法[12]是于1995年由計(jì)算機(jī)專家Ebberhar等提出的。粒子群算法的結(jié)構(gòu)設(shè)計(jì)較為簡單,不需要像遺傳算法一樣,對個(gè)體進(jìn)行交叉和變異等操作,運(yùn)算速度較快。粒子群算法是從隨機(jī)初始值出發(fā),經(jīng)過不斷搜索尋找最佳解。通過跟蹤當(dāng)前的局部最優(yōu)預(yù)測值來確定全局最優(yōu)解[13-14]。
基本的粒子群算法步驟如下:
1) 初始化粒子群:對粒子位置xi、速度vi、集群的大小N、最大迭代數(shù)G和學(xué)習(xí)因子c1、c2等粒子速度和位置進(jìn)行初始化;
2) 計(jì)算適應(yīng)度值:將每個(gè)粒子數(shù)據(jù)引入到Bouc-Wen模型中,經(jīng)過計(jì)算后獲得輸出值,將數(shù)據(jù)帶入到適應(yīng)度函數(shù)中,算出適應(yīng)度值;
3) 計(jì)算模型精度,判斷其是否滿足要求;
4) 對粒子的速度和位置進(jìn)行更新;
5) 步驟循環(huán):對上述步驟循環(huán),直至種群適應(yīng)度值滿足模型的精度要求,或者達(dá)到最大迭代數(shù),則退出循環(huán)。
在粒子群算法中,模型中粒子速度和位置如下:
(3)
式(3)中,pi是自身最佳的位置,p是整個(gè)種群的最佳位置,w為慣性權(quán)重,c1和c2為學(xué)習(xí)因子,r1和r2為[0,1]范圍內(nèi)的隨機(jī)數(shù),vi為粒子速度,xi為粒子位置,k為當(dāng)前迭代次數(shù),kmax為最大迭代次數(shù),wmax為迭代開始時(shí)的慣性權(quán)重,wmin為迭代結(jié)束時(shí)的慣性權(quán)重。
2.3 混沌粒子群算法
粒子群算法在尋優(yōu)過程中,極易陷入局部極值。對多參數(shù)對象辨識時(shí),會出現(xiàn)效率低、模型準(zhǔn)確率差等問題。其主要原因是基礎(chǔ)的粒子群算法中的慣性權(quán)重和學(xué)習(xí)因子都是常量,不具有動態(tài)調(diào)節(jié)能力,無法隨著迭代的進(jìn)行而進(jìn)行實(shí)時(shí)改變,從而導(dǎo)致算法容易陷入局部最優(yōu)。為解決上述問題,本文通過利用混沌映射[15-16]的遍歷性和隨機(jī)性,實(shí)現(xiàn)粒子群算法的局部深搜索,增強(qiáng)其局部尋優(yōu)能力。本文利用混沌粒子群優(yōu)化算法進(jìn)行模型的參數(shù)辨別,選用Logistic混沌作為混沌粒子群優(yōu)化算法中的慣性權(quán)重,來增強(qiáng)粒子群的優(yōu)化能力。
Logistic混沌映射[17]的非線性方程如下:
(4)
式(4)中,μ表示控制參數(shù)。μ為4時(shí),Logistic混沌在[0,1]內(nèi)隨機(jī)分布。
2.4 改進(jìn)Bouc-Wen遲滯模型的參數(shù)辨識方法
為了獲取壓電微納平臺遲滯回線,采用理想位移是幅值為10 V,頻率為1 Hz的正弦信號激勵(lì)壓電微納平臺,得到壓電微納平臺的各種數(shù)據(jù)并將其保存。獲得數(shù)據(jù)后,接下來通過混沌粒子群算法對改進(jìn)Bouc-Wen模型進(jìn)行參數(shù)辨識。參數(shù)辨別流程如圖3所示。
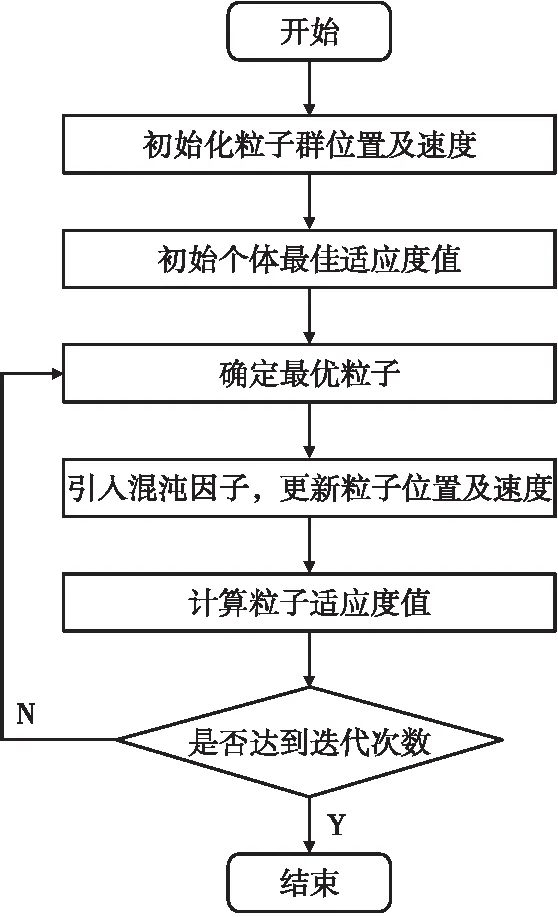
圖3 參數(shù)辨別流程圖
混沌粒子群算法步驟如下:
1) 初始化粒子群:對粒子位置xi、速度vi、集群的大小N、最大迭代數(shù)G和學(xué)習(xí)因子c1、c2等粒子速度和位置進(jìn)行初始化。
2) 計(jì)算適應(yīng)度值:本文的適應(yīng)度函數(shù)基于實(shí)驗(yàn)數(shù)據(jù)與改進(jìn)Bouc-Wen模型的建模數(shù)據(jù)來建立,公式為
(5)

3) 位置、速度更新:引入混沌粒子后0更新位置及速度為
(6)
式(6)中,μ表示控制參數(shù),xi為粒子位置,k為迭代次數(shù),vi為粒子速度,w為慣性權(quán)重,c1和c2為學(xué)習(xí)因子,r1和r2為[0,1]范圍內(nèi)的隨機(jī)數(shù),pi是自身最佳的位置,pg是整個(gè)種群的最佳位置。
4) 計(jì)算粒子更新后適應(yīng)度:將更新后參數(shù)代入適應(yīng)度函數(shù)中進(jìn)行計(jì)算。
5) 步驟循環(huán):判斷是否滿足迭代次數(shù)要求,未滿足繼續(xù)循環(huán),滿足要求則跳出循環(huán)。
最后將所有辨識出來的參數(shù)帶入到改進(jìn)Bouc-Wen模型中得到遲滯曲線,將其與實(shí)際測量出來的壓電微納平臺的遲滯曲線進(jìn)行比較。
3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)裝置
為了驗(yàn)證混沌粒子群對改進(jìn)Bouc-Wen模型參數(shù)辨識的有效性,建立了壓電微納平臺的實(shí)驗(yàn)系統(tǒng)。實(shí)驗(yàn)系統(tǒng)主要由德國PI公司生產(chǎn)的P563.3CD型壓電陶瓷驅(qū)動器PEA、壓電放大器E-725、PEA內(nèi)置電容式位移傳感器和由Matlab的仿真系統(tǒng)組成。利用參考位移yd信號頻率為1 Hz位移區(qū)域?yàn)椤?0的正弦波和方波來完成實(shí)驗(yàn)。
3.2 實(shí)驗(yàn)結(jié)果
改進(jìn)的Bouc-Wen模型分別有權(quán)重系數(shù)k0和k1,遲滯性參數(shù)α、φ1、φ2、φ3、φ4以及初值補(bǔ)償系數(shù)d。為了彌補(bǔ)傳統(tǒng)粒子群算法的不足,使用混沌粒子群對改進(jìn)的Bouc-Wen模型參數(shù)進(jìn)行辨識。
以頻率為1 Hz的正弦波和三角波為輸入,使用最小二乘法(LS)、遺傳算法(GA)粒子群(PSO)與混沌粒子群優(yōu)化算法(CPSO)對改進(jìn)Bouc-Wen模型進(jìn)行參數(shù)辨識。正弦波輸出位移滯后曲線和位移誤差圖如圖4、圖5所示,三角波輸出位移滯后曲線和位移誤差圖如圖6、圖7所示,正弦波適應(yīng)度曲線如圖8所示。

圖4 正弦波輸出位移滯后曲線圖

圖5 正弦波誤差對比圖

圖6 三角波輸出位移滯后曲線圖
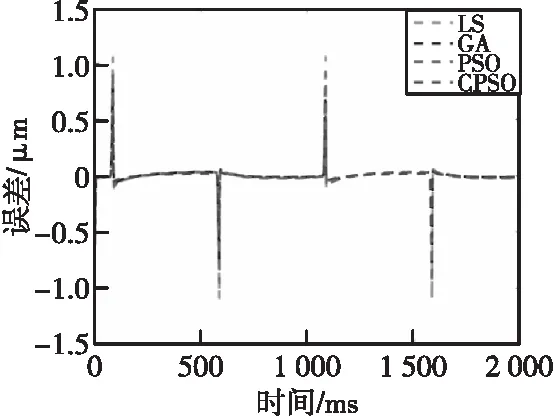
圖7 三角波誤差對比圖
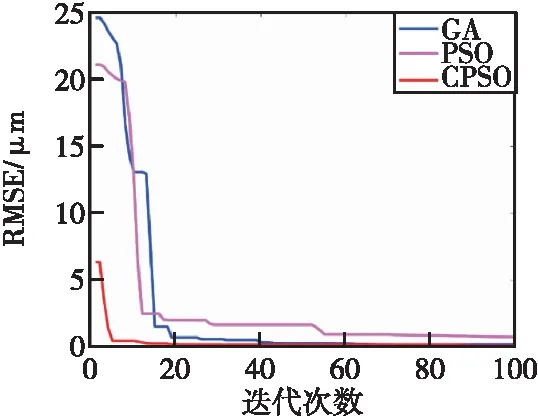
圖8 正弦波適應(yīng)度曲線圖
從圖4和圖6中可以看出,最小二乘法獲得參數(shù)的擬合圖偏差最大,遺傳算法和粒子群算法辨識參數(shù)要優(yōu)于最小二乘法。而混沌粒子群相較于其他三種算法辨識參數(shù)額數(shù)據(jù)擬合精度有較大提高。而圖5和圖7中顯示的誤差對比圖也說明了混沌粒子群參數(shù)辨識的有效性。同時(shí)從圖8可以看出,混沌粒子群算法在10代左右就達(dá)到了收斂,而粒子群算法在40代后才開始收斂,遺傳算法在100代都沒有到達(dá)收斂。而且混沌粒子群優(yōu)化的平均誤差和均方根誤差都要小于其他算法,因此可說明混沌粒子群算法更加適用于改進(jìn)Bouc-Wen模型的參數(shù)辨識。
表1所示為混沌粒子群算法辨識出的改進(jìn)Bouc-Wen模型輸如頻率為1 Hz的正弦波與三角波參數(shù)。

表1 CPSO識別改進(jìn)Bouc-Wen模型參數(shù)
表2所示為各種算法辨識參數(shù)優(yōu)化下正弦波與三角波的辨識誤差。為了判斷數(shù)據(jù)的整體準(zhǔn)確性和數(shù)據(jù)預(yù)測精密度,本文使用平均誤差和均方根誤差來確認(rèn)預(yù)測數(shù)據(jù)的準(zhǔn)確性。其中,平均誤差表示所有值的隨機(jī)誤差的算數(shù)平均值,可以顯示整體數(shù)據(jù)的準(zhǔn)確性,而均方根誤差對數(shù)據(jù)中特大和特小誤差反應(yīng)非常靈敏,所以,均方根誤差能更好地反映出數(shù)據(jù)預(yù)測的精密度。實(shí)驗(yàn)數(shù)據(jù)表明,混沌粒子群能夠更加準(zhǔn)確地對改進(jìn)Bouc-Wen模型的遲滯現(xiàn)象進(jìn)行描述。

表2 辨識誤差
由表1和表2可知,本文使用的CPSO算法在優(yōu)化結(jié)果上均優(yōu)于其他三種對比算法,在平均誤差和和均方根誤差都小于其他算法優(yōu)化結(jié)果。綜合來看本文算法在微納米平臺遲滯研究中參數(shù)辨識結(jié)果最優(yōu),進(jìn)一步分析得出
1) 本文所使用混沌粒子優(yōu)化群算法在10代左右達(dá)到收斂,而其他算法達(dá)到收斂的迭代次數(shù)遠(yuǎn)遠(yuǎn)高于混沌粒子群算法,說明本文引入混沌因子方法可有效避免模型出現(xiàn)局部極值問題,具有更快的收斂速度和更好的辨識精度。
2) 粒子群算法相比最小二乘法和遺傳算法無論正弦波還是三角波誤差都有較大程度降低。以正弦波為例,平均誤差降低了0.061 μm和0.016 7 μm,均方根誤差降低了0.068 2 μm和0.015 4 μm。說明選用粒子群算法為基礎(chǔ)算法對改進(jìn)Bouc-Wen模型進(jìn)行參數(shù)辨別更為有效。
3) 本文所使用混沌粒子優(yōu)化群算法比未進(jìn)行改進(jìn)的粒子群算法對實(shí)際遲滯曲線描述誤差更小。以正弦波為例,平均誤差降低了0.022 2 μm,均方根誤差降低了0.024 6 μm。說明引入混沌因子后,模型學(xué)習(xí)因子具有動態(tài)調(diào)節(jié)能力,增強(qiáng)了模型局部尋優(yōu)能力,提升了計(jì)算精度。
4 結(jié)論
由于傳統(tǒng)Bouc-Wen模型無法準(zhǔn)確描述壓電微納平臺的遲滯現(xiàn)象,本文通過引入遲滯因子對傳統(tǒng)Bouc-Wen模型進(jìn)行改進(jìn),使用粒子群算法對其進(jìn)行參數(shù)辨識,證明改進(jìn)模型與真實(shí)遲滯曲線擬合情況更好。針對改進(jìn)Bouc-Wen模型參數(shù)多、難以辨識的特點(diǎn),使用了混沌粒子群優(yōu)化算法對慣性權(quán)重、個(gè)體學(xué)習(xí)因子和社會學(xué)習(xí)因子進(jìn)行改進(jìn),以此改善算法的收斂速度和整體優(yōu)化能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03