一種坦克炮長瞄準鏡系統狀態評估的方法
2023-09-07 10:18:06解寶琦李英順王德彪隋歡歡
兵工學報 2023年8期
關鍵詞:模型
解寶琦, 李英順, 王德彪, 隋歡歡
(1.廣西科技大學 電氣電子與計算機科學學院, 廣西 柳州 545000; 2.大連理工大學 控制科學與工程學院, 遼寧 大連 116200;3.沈陽順義科技有限公司, 遼寧 沈陽 110027)
0 引言
隨著軍事領域的高速發展,裝備系統的集成化、信息化程度不斷的提高,帶來了一系列新的故障問題,傳統裝備故障檢測和維修保障已不能滿足其維修保障的需求,坦克火控系統在這方面表現尤為明顯。炮長瞄準鏡系統作為坦克輸出主要來源之一,是其中重要的組成部分,為其設計專門的狀態評估系統[1-2],能夠提高系統的可靠性和可用性。
目前,常用的裝備健康狀態評估算法可以分為模型計算法、機器學習法和評估分析法[3]。模型計算法通過構建一個融合計算模型或者比較模型計算出裝備的健康度,其中組合賦權法被不斷地應用于健康狀態評估領域。文獻[4]通過組合賦權法確定權重,在根據灰云聚類融合方法和最小二乘法進行立磨機的健康度評估。然而,因為裝備監測數據問題使得數學模型難以確定。機器學習法通過大量數據訓練各種機器學習進行裝備狀態評估。近些年來國內外越來越多的學者將各種各樣的神經網絡應用到健康狀態評估上[5-7],其中自組織映射(SOM)神經網絡因其具有抗噪聲干擾能力強的特點,使得其在健康狀態評估上的取得了較好的效果[8-9]。評估分析法在健康狀態評估的應用也越來越廣泛,模糊理論[10]和證據理論[11-16]是其中比較成熟的方法,在裝備狀態評估中已經得到較多的應用。此外,一種將統計數學和模糊數學相結合的云模型[17-20]在狀態評估也有一定應用,縱觀現有文獻云模型在評估的例子還不多,值得深入研究。
為建立一種準確、高效、客觀的坦克炮長瞄準鏡系統的健康狀態評估,本文針對坦克炮長瞄準鏡系統在健康狀態評估工作中存在的問題,提出一種改進云模型相結合的健康狀態評估算法。一方面考慮到炮長瞄準鏡系統信號復雜的問題,采用組合賦權法確定系統各個指標權重。另一方面,針對現有方法主要通過專家評價確定指標閾值的問題,建立SOM神經網絡對系統運行數據進行聚類,根據聚類結果確定各個指標閾值,用于確定云模型的云化區間。同時,考慮到相鄰狀態的連續性和模糊性,通過改進云模型構建狀態評估模型,并引入超熵用于坦克炮長瞄準鏡系統在健康狀態等級的評估等級結果判定。
1 評價指標權重確定方法
1.1 改進模糊層次分析法
本文采用相對于與傳統層次分析法(AHP)計算精度更高的模糊層次分析法(FAHP)[13-14]并引入更符合人類的思維模式的決策機制的三標度法對其進行改進。其具體過程如下:
1) 通過三標度法[15]構建優先判斷矩陣F=(fij)n×n,i,j=1,2,…,n,F=(fij)n×n為模糊判斷矩陣,fij為根據指標i與指標j的比較取值(見表1)。

表1 模糊判斷矩陣比較取值
2) 根據模糊判斷矩陣,求得模糊一致性判斷矩陣R=(rij)n×n,其中rij公式為
(1)
3) 將R=(rij)n×n轉換為互反型矩陣E=(eij)n×n,其中:
(2)
4) 通過歸一法計算出權重向量W(0),其中:
(3)
5) 通過特征值法將 經過迭代進一步計算出更精確的權重向量[10]。
1.2 改進熵權法
熵權法是利用評估指標的信息熵計算各個指標客觀權重的方法。為了避免評價過程中,可能造成的權重失真[17]的問題,本文對熵權法進行改進。其具體過程如下:
1) 根據指標體系構建評價指標矩陣Q=(qij)n×m,i=1,2,…,n,j=1,2,…,m,其中qij為第j個指標的第i個實際值。
2) 對評價指標矩陣Q進行一致化處理消除綱量得到標準矩陣P=(pij)n×m,其中pij為
(4)
計算評價指標的信息熵Ej,計算公式為
(5)
3) 通過式(5)計算出第j個指標的權重wj,計算公式為
(6)
針對熵權法存在的問題對式(6)進行改進,計算公式為
(7)
1.3 組合賦權法
組合賦權法是一種既能包容主觀賦權法因專家意愿的主觀性,又能忽略客觀賦權法因過于依賴數據局限性的方法。為此,本文提出一種基于改進博弈論法的組合賦權法。
針對博弈論法在計算組合權重時可能會出現權重系數為負數的情況。本文通過加入約束條件建立最優化模型對傳統博弈論法進行改進[18],具體步驟如下:
1) 由目標函數以及約束條件,建立最優化模型。
(8)
式中:aj為組合權重系數;wi、wj分別為主、客觀權重向量。
2) 構建拉格朗日函數。

(9)
3) 對(9)求偏導,由極值條件可得由計算可得組合系數為
(10)
(11)
5) 由組合賦權法可得最終權重w*T為
(12)
2 基于改進云模型的裝備狀態評估
2.1 裝備狀態等級特征
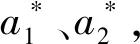
隨著裝備技術和維修理論的發展,采用故障和正常二值函數來描述裝備的技術,已難以滿足實際需求,因此從生物領域引用健康狀態來描述復雜裝備所處的工作狀態,依據健康狀態分級原則,從健康管理的角度將裝備技術狀態分為5個等級。裝備健康等級描述如表2健康狀態等級描述所示。
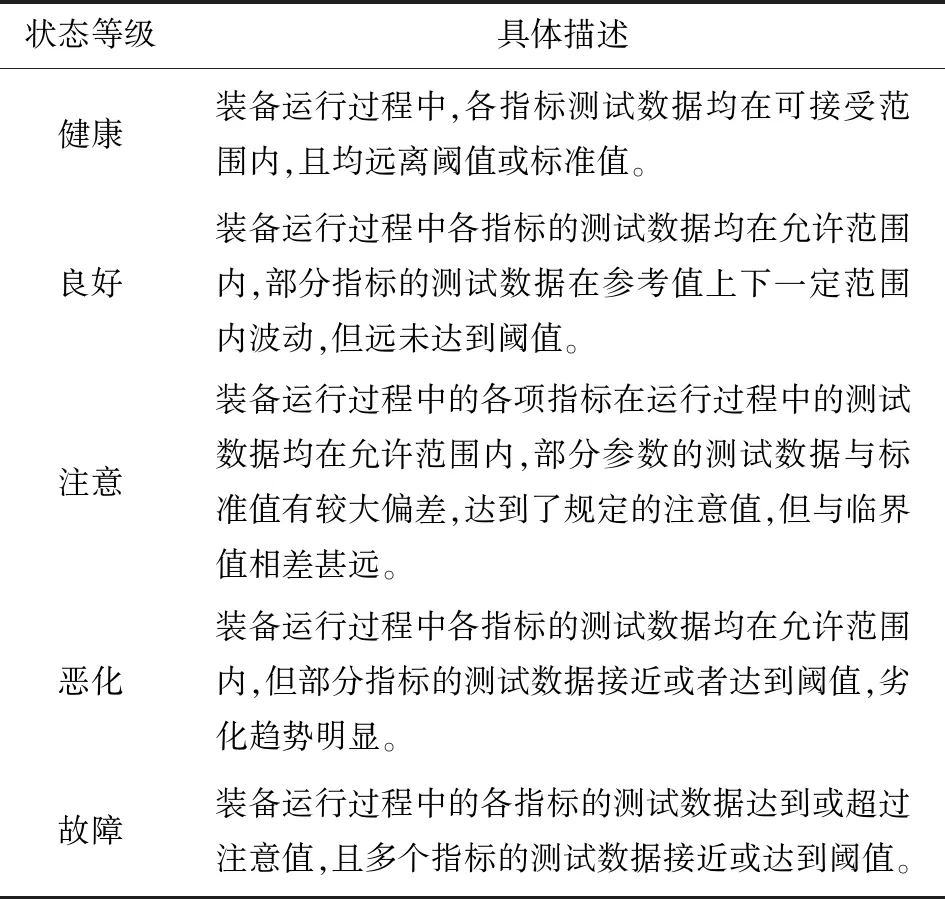
表2 健康狀態等級描述
2.2 基于SOM神經網絡確定狀態等級的云化區間
根據如表2所示將經過歸一化后的裝備狀態數據分為健康、良好、注意、惡化和故障這5個數值區間,其中1為故障,0為健康。在將狀態等級云概念化,確定對應狀態的云化區間,再將計算出的云重心代入到云評估模型中,得到裝備狀態等級。
目前,狀態評估區間大多僅是通過多名維修專家進行打分確定,這樣使得結果受到主觀人為影響。針對該問題,本文根據裝備運行過程的測試數據,通過SOM神經網絡進行聚類,再根據聚類結果確定各指標閾值,進而確定等級云化區間參數。
SOM是一種能夠進行自組織、自適應地改變網絡參數與結構的無監督學習網絡。其能夠很好地處理非線性數據,并具有抗噪聲干擾能力強的優點。
SOM神經網絡結構如圖1所示,主要通過競爭層基于輸入層對輸入數據的響應程度競爭輸出得到輸入數據的拓撲網絡分布,根據獲勝神經元對附近神經元的影響程度實現聚類,具體過程如下:
圖1 SOM神經網絡結構示意圖
1) 初始化設置。對輸入數據進行歸一化處理后,設置競爭層初始權重向量wi,確定拓撲鄰域半徑σ0以及初始學習率η0。
2) 確定獲勝神經元。根據輸入向量xi與權重向量wi最小歐式距離確定獲勝神經元i(x):
i(x)=‖xi-wi‖
(13)
3) 更新學習率和拓撲鄰域半徑,并確定以獲勝神經元為中心拓撲鄰域N(t)。更新后,學習率η(t)、拓撲鄰域半徑σ(t)及拓撲鄰域N(t)分別為
η(t)=η0×e-t/(T/3)
(14)
σ(t)=σ0×e-t/((T/3)/lnσ0)
(15)
N(t)=e-‖wi-wi(x)‖2)/2(σ(t))2
(16)
式中:t為當前訓練次數;T為總訓練次數。
4) 更新權重向量。
wij(t+1)=wij(t)+η(t)×N(t)×(xk-wij(t))
(17)
式中:xk為第k個輸入數據。
5) 判斷是否收斂。如果達到預設迭代次數,結束訓練,否則進行下一次訓練。
根據SOM神經網絡聚類結果確定如表3所示的狀態等級云化區間定義,表3中a、b、c、d分別為各個狀態等級的轉折閾值。
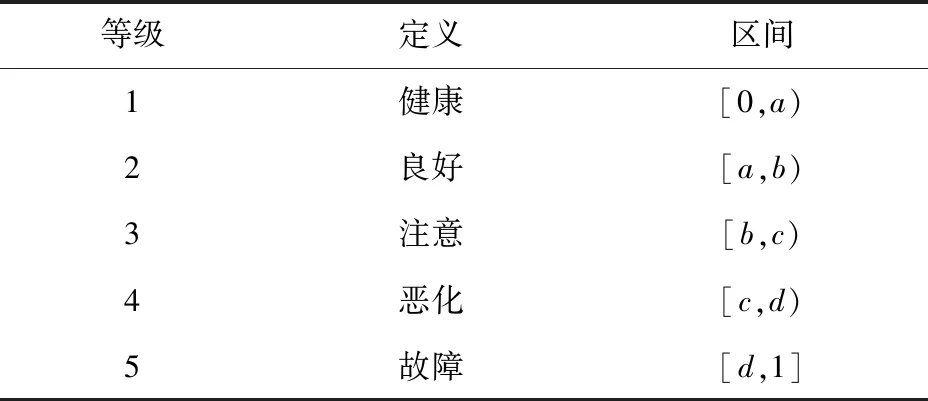
表3 狀態等級的云化區間定義
2.3 云模型的建立
云模型將統計數學和模糊數學相結合,實現了定性概念和定量描述的自然轉化[20]。目前,云模型已經成功的應用在大系統的效能評估、智能控制等眾多領域。
2.3.1 云模型的定義
假設C是定量論域U上的定性概念,若x∈U是C的一次隨機實現,并且x對C的隸屬度μ(x)∈[0,1]是有穩態分布的隨機數:
μ(x)∶U→[0,1]?x∈U
(18)
則稱x在定量論域U上的分布為云模型,每一個x為一個云滴其中μ(x)能夠反映x對C的隸屬度。
云模型將一個定性概念由期望、熵和超熵共同表達,反映概念的不確定性。并且將模糊性和隨機性集成到一起,構成定量與定性相互間的映射關系,其數字特征曲線如圖2所示。圖2中,En為熵,He為超熵,通常取任意常數。
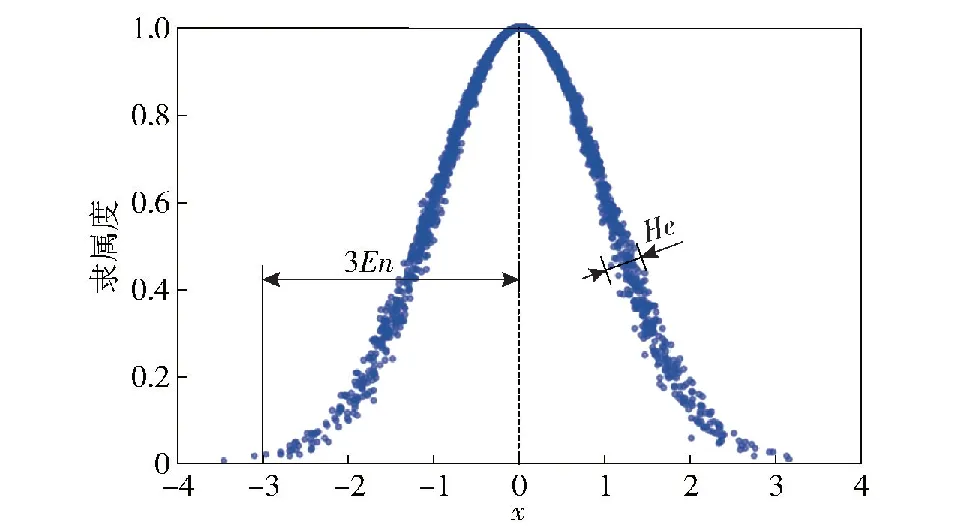
圖2 云模型數字特征曲線
2.3.2 云模型各參數確定方法
由組合權重與SOM神經網絡計算出的指標閾值合理求得云化區間后,需要根據合理的方法確定云模型的(Ex,En,He)這3個數字特征,生成多維評價云模型,Ex為期望。設裝備某一狀態的云化區間定性概念描述為[a,b],傳統云模型的3個數字特征參數的求解過程如下:
(19)
2.3.2.1 熵的確定方法
由式(19)可知,傳統云模型的云滴的生成是基于3En法則生成的。這種方式生成的云模型,其云區間內的云滴貢獻率通常可以達到99%以上,這就說明,若采用基于3En法則構建裝備狀態云模型,那么相鄰的云之間基本不會出現重疊[21]。而實際情況下,相鄰的兩個裝備狀態等級之間存在著一定的連續性和模糊性。因此,各狀態等級的評價云之間通常是存在交集的,顯然這種方式與實際評估不相適應。
為解決上述問題,本文分別計算云滴x分別在Ex+En、Ex+2En和Ex+3En處的隸屬度并進行對比,其隸屬分別為:μ(Ex+En)≈0.607,μ(Ex+2En)≈0.135,μ(Ex+3En)≈0。
由此可知云滴x分別在[Ex-En]∪[Ex+En]、[Ex-2En]∪[Ex+2En]、[Ex-3En]∪[Ex+3En]上對定性概念依次變弱。根據計算結果分析可知,在Ex+2En處的隸屬度為0.15,說明在該處附近的云滴相對于相鄰的兩個評價云的隸屬度均較弱,并且難以根據隸屬關系直觀進行判斷,能夠較好地表示相鄰的兩個裝備狀態等級之間的連續性和模糊性。此外,根據以上結論采用基于2En法則生的云模型,其云區間內的云滴的貢獻率也達到了95.44%,說明基于2En法則的評價云仍然可行。因此,采用改進的2En法則相對傳統云模型更加貼合實際。
由2.2節可知裝備狀態共分為5個等級,當等級i為2、3、4時評價云為完整云模型,其期望Exi和熵En求解過程為
(20)
當等級i為1或者5時評價云采用半云模型,其期望Exi和熵Eni求解過程為
(21)
2.3.2.2 超熵的確定方法
云模型的超熵并沒有確定的取值方法,由文獻[22]可知,當超熵He較大,云會發生霧化。文獻中指出,當He
2.3.3 炮長瞄準鏡系統狀態評估流程
基于云重心的裝備狀態評估是一種利用構建對應等級的云圖進行評估的方法。其具體流程如下:
1) 通過SOM神經網絡計算出各指標狀態等級[23]的閾值進而確定云化區間;
2) 利用組合賦權法確定各個指標權重;
3) 根據狀態等級的云化區間和指標權重,構建各個狀態等級的云模型;
4) 根據各個指標的權重計算出云重心,得出評分值。
5) 激活云發生器,確定坦克炮長瞄準鏡系統的狀態評估等級。
2.3.4 評估流程評估等級的確定
若加權綜合權重得到的云重心位置為xa,由云模型性質可知xa與各個評價云對于的隸屬度μi(xa)為
(22)
當xa位于兩片評價云之間時,單單依靠μi(xa)很難判斷裝備狀態等級。針對該問題,本文通過引入云模型在xa處的超熵進行判斷。
設相鄰兩裝備狀態評價云的數值特征分別為TCi=(Exi,Eni,Hei)與TCi+1=(Exi+1,Eni+1,Hei+1)以及在xa處的隸屬度μi(xa)和μi+1(xa)。若|μi(xa)-μi+1(xa)|<δ(δ為閾值,通常取0.1),即xa位于兩片評價云之間時,通過激發逆向云發生器[24-26]。對裝備狀態進行判斷,其判斷流程如下:
1) 確定評價云在xa處的云滴個數n。



3 實例分析
由于炮長瞄準鏡系統結構復雜,信號繁多,受篇幅限制無法對炮長瞄準鏡系統整體做狀態評估,故本文以某型坦克上反射鏡平臺力矩電機為實例對象。以上反射鏡發生碰框時力矩電機的運行狀態為例對本文的算法進行驗證。
炮長瞄準鏡系統的上反射鏡力矩電機主要分為垂直控制力矩電機模塊、水平控制力矩電機模塊和電源模塊3個模塊,垂直控制力矩電機模塊和水平控制力矩電機模塊分別由瞄準鏡控制盒中的垂直控制板和水平控制板控制,電源信號模塊主要負責電機、垂直控制板和水平控制板的供電,控制板的工作主要負責觀瞄系統工況的選擇,裝表信號的輸入和輸出以及瞄準鏡碰框的信號反饋。由層次分析可得上反射鏡碰框時力矩電機運行狀況層次分解圖,如圖3所示。
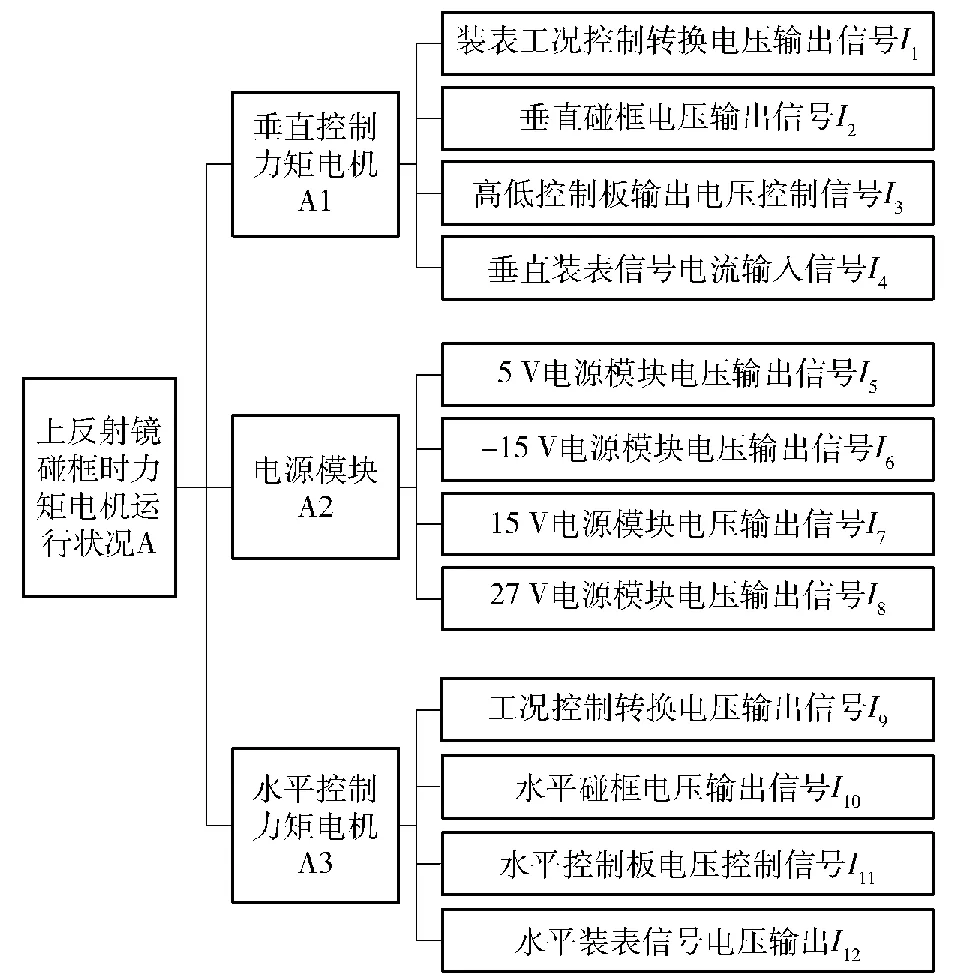
圖3 上反射鏡碰框時力矩電機運行狀況層次圖
3.1 評估流程評估等級的確定
3.1.1 主觀權重的確定

綜上所述,結合1級指標權重和2級指標權重得到各個指標相對于上反射鏡碰框時力矩電機運行狀況的主觀權重w1為

3.1.2 客觀權重的確定
由于不同指標的大小和數量級之間存在差異,在確定各個指標的客觀權重前,首先,對各個指標參數通過式(23)進行歸一化處理:
(23)
式中:max{xij}、min{xij}分別為指標x的信號值的最大值和最小值。
選取一臺已知狀態的某型坦克炮長瞄準鏡系統的上反射鏡力矩電機分別在穩像工況和裝表工況條件下的10組監測數據進行評估,歸一化處理后的數據如表4所示。
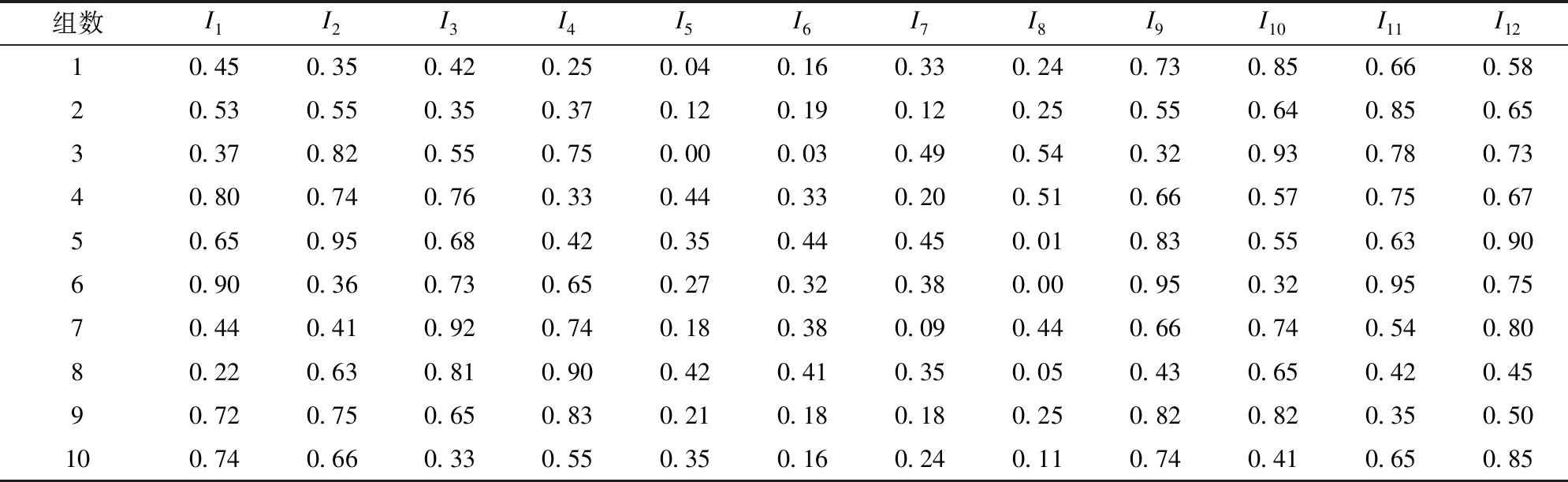
表4 試驗測試數據歸一化
根據表4數據,由本文采用的改進熵權法確定各個指標的客觀權重w2為

3.1.3 組合權重的確定
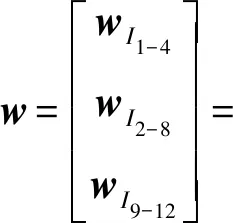
由上述所求主觀權重w1和的客觀權重w2,由式(12)分別計算出主、客觀權重的綜合權重,最后根據式(13)確定各個指標最終權重w:
3.2 裝備狀態云模型化
3.2.1 確定狀態等級的云化區間

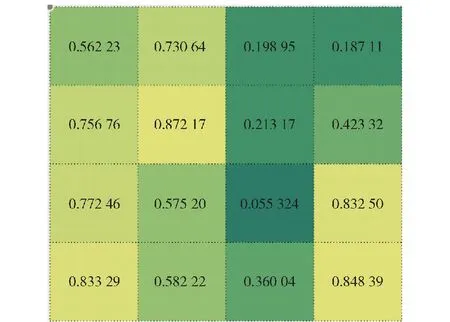
圖4 SOM神經網絡訓練輸出結果


根據確定的最終云化區間的轉折閾值,確定裝備各個狀態等級的云化區間如表5所示。

表5 狀態等級的云化區間
3.2.2 改進云模型的建立
由裝備各個狀態等級的云化區間,根據2En法及2.3節中的方法,確定各個狀態等級評價云[33]的各參數如表6所示。
表6 各評價云的云模型參數
根據表6,利用PyCharm軟件仿真基于改進云模型的狀態評估模型結果如圖5所示。
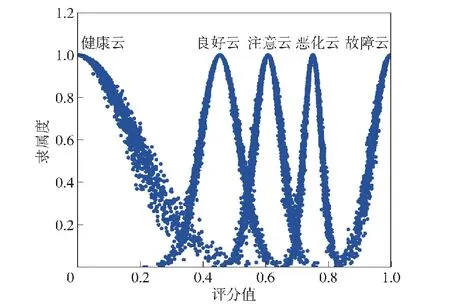
圖5 狀態評估模型仿真結果
3.2.3 云重心位置計算
利用本文之前所求的各個指標權重計算出某型坦克炮長瞄準鏡系統的上反射鏡碰框時力矩電機運行狀況實測第4組數據的綜合云重心位置xa=0.583 2,觸發良好云與注意云。注意狀態云的期望為0.608 2,根據式(22)可得狀態屬于注意狀態的隸屬度μ3=0.847,良好狀態云的期望為0.454 4,屬于注意狀態的隸屬度μ2<0.1。因此,此時上反射鏡碰框時力矩電機運行狀況的狀態等級[34]為注意。
3.3 綜合評估
根據3.2節所述狀態等級評估等級過程,對某型坦克炮長瞄準鏡系統的上反射鏡碰框時力矩電機運行狀況實測數據進行狀態等級的綜合評估,其各組數據的云重心如表7所示。

表7 云重心計算結果
根據表7計算出的云重心結果確定力矩電機運行狀況的狀態等級,其中e1~e5分別為健康、良好、注意、惡化以及故障等5個狀態等級,如圖6所示。
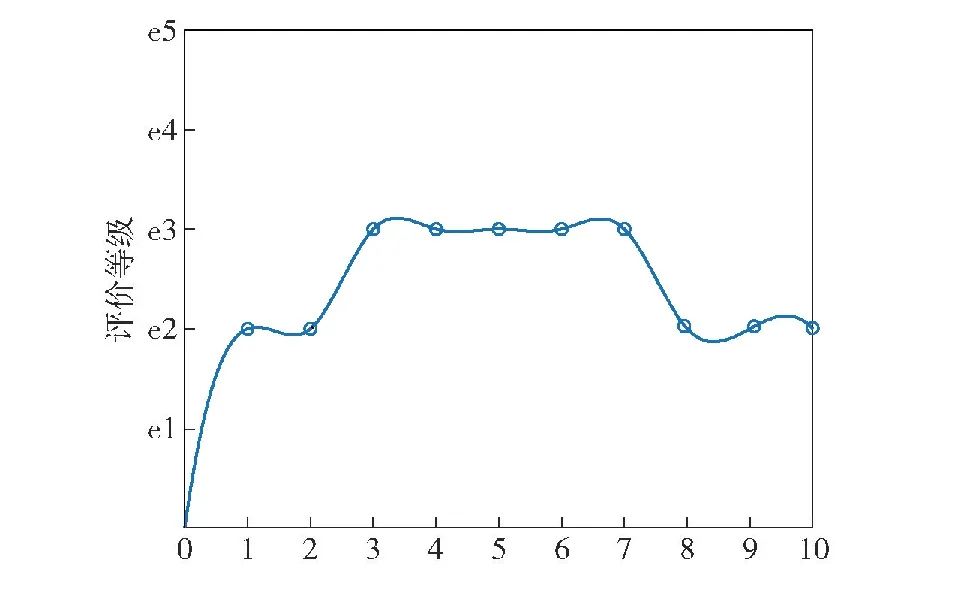
圖6 上反射鏡碰框時力矩電機運行狀態趨勢圖
仿真結果顯示,設備開始處于良好狀態,從第3組數據開始時設備轉為注意狀態。經過對各個指標的評估發現其中多個指標出現了異常,其中,垂直控制力矩電機指標信號的現象尤為明顯。經后續維修人員排查發現高低控制板發生故障,更換后設備狀態轉為良好。由此可得,本文的評估結果比較貼合實際,能夠幫助維修人員在裝備維修時提供一定的參考。
3.4 評估算法對比
選取另外10臺同型號的坦克炮長瞄準鏡系統上反射鏡碰框時力矩電機測得10組運行狀態數據,分別采用傳統云模型以及其他以應用的如文獻[16]的改進白化權函數的方法與本文提出的方法分別對10臺力矩電機進行綜合評估,具體評估結果如圖7所示。
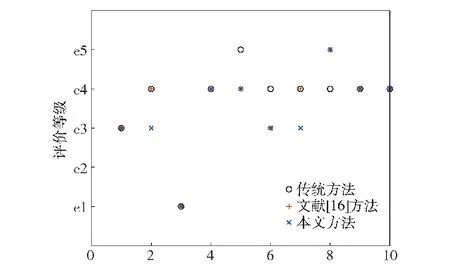
圖7 評估對比結果
由圖7可知,本文方法與傳統云模型在2組、5組、6組、8組的評估結果發生了分歧。根據分析,評估結果不同的主要原因是傳統云模型并沒有考慮到相鄰狀態的關聯性和模糊性。而文獻[16]中的方法在2組、8組的評估結果發生了跳變,是因為該方法雖然考慮到了等級之間的關聯性,但是忽略了其中的模糊性,導致了結果的偏差,從而驗證了本文所建立的評估模型是合理并且科學有效的。
4 結論
本文針對某型坦克的炮長瞄準鏡系統提出了一種健康狀態評估的方法,并通過上反射鏡碰框時力矩電機運行數據進行驗證。得出以下主要結論:
1) 通過改進組合賦權法確定的各個指標的最終權重更加科學且合理。
2) 通過SOM神經網絡對炮長瞄準鏡運行數據進行聚類分析得到的裝備各個狀態等級的云化區間更加合理。
3) 根據各個狀態等級的云化區間,基于2En法則生成的評價云模型能夠較好地表示相鄰的兩個裝備狀態等級之間的連續性和模糊性。
本文提出的評估方法的評估結果科學并且客觀,有助于為裝備運行狀態的檢修提供指導,并為后續的裝備健康管理提供了參照。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19