基于浸入與不變原理的水輪機調節(jié)系統(tǒng)簇發(fā)振蕩控制
2023-09-05 02:11:28李冬航張宏立
振動與沖擊 2023年16期
李冬航, 王 聰, 張宏立, 馬 萍
(新疆大學 電氣工程學院,烏魯木齊 830047)
水輪機調節(jié)系統(tǒng)是由機械、電氣、水力耦合的復雜非線性系統(tǒng)[1],凌代儉等[2]指出其調節(jié)對象具有非線性、最小相位特性;郭鵬程等[3-4]也論證了水輪機調節(jié)系統(tǒng)復雜的非線性動力學行為。由于其穩(wěn)定性關系到整個水電機組甚至是電網的正常運行,因此,對水輪機調節(jié)系統(tǒng)進行非線性動力學分析并設計合理的控制策略具有重要的研究意義。
近年來,水輪機調節(jié)系統(tǒng)中混沌現象的分析和抑制問題受到越來越多的重視[5],許多先進控制理論被應用到其控制中。陳帝伊等[6]將滑模控制應用到混沌狀態(tài)的水輪機調節(jié)系統(tǒng)中,消除了水輪機調節(jié)系統(tǒng)由于比例-積分-微分(proportion-integral-derivative,PID)參數選取不當而引起的混沌現象;王斌等[7]針對混沌狀態(tài)的水輪機調節(jié)系統(tǒng)設計了終端滑模有限時間控制器,通過引入新的非奇異終端滑模面,克服了傳統(tǒng)滑模面的奇異性問題;Rajagopal等[8]分析了分數階水輪機調節(jié)系統(tǒng)中的混沌現象,通過引入模糊規(guī)則設計了模糊PID控制器,將水輪機調節(jié)系統(tǒng)控制在了穩(wěn)態(tài)。
然而,在參數激勵下或考慮其機械、電氣、水力部分的響應速度時,水輪機調節(jié)系統(tǒng)是多尺度耦合的系統(tǒng),受快慢動力學效應的影響,其極易產生簇發(fā)振蕩行為[9]。Zhang等[10-11]通過將傳遞系數等效為周期激勵或考慮水輪機調節(jié)系統(tǒng)機械部分的慢時間尺度,將原水輪機調節(jié)系統(tǒng)劃分為兩尺度耦合的系統(tǒng),分析出水輪機調節(jié)系統(tǒng)存在快慢動力學行為;Li等[12]在此基礎上進一步分析了高階水輪機調節(jié)系統(tǒng)的簇發(fā)振蕩現象。簇發(fā)振蕩的存在會影響水輪機調節(jié)系統(tǒng)的穩(wěn)定運行,但是以上研究大多是基于水輪機調節(jié)系統(tǒng)混沌現象的分析和抑制,且針對其簇發(fā)振蕩的研究也局限于現象的分析,較少考慮簇發(fā)振蕩的抑制問題。
針對上述不足,本文采用基于浸入與不變原理的自適應反步滑模控制策略抑制水輪機調節(jié)系統(tǒng)的簇發(fā)振蕩行為。其中,滑模控制具有較強的魯棒性,但是其良好的控制性能是通過控制量的高頻抖動換取的,在實際應用中受到一定的限制。而反步法是基于Lyapunov函數逐步遞推的控制方法,在設計上具有更大的靈活性且不存在抖振的現象。本文將兩者結合[13]進行水輪機調節(jié)系統(tǒng)控制器的設計。自適應控制常應用于具有復雜擾動的非線性系統(tǒng),但是傳統(tǒng)的基于等價原則的自適應控制方法在系統(tǒng)的參數估計上具有一定的局限性。浸入與不變原理是通過對擾動估計誤差建立流形并保持其吸引與不變來維持系統(tǒng)穩(wěn)定的,其在電機、機器人、電力電子等領域的應用均取得了很好的效果[14-16],但在水力發(fā)電領域尚未應用。本文將這一思想應用到水輪機調節(jié)系統(tǒng)的參數估計中,在其參數的估計中引入的額外補償項增加了設計的自由度且此補償項的引入使得傳統(tǒng)自適應方法中參數估計的積分作用轉化為了比例積分作用,比例積分形式的補償項使得對擾動估計的收斂速度不斷提升,在提高參數估計的靈活性的同時也改善了系統(tǒng)的控制性能。本文所提出的控制方案保證了水輪機調節(jié)系統(tǒng)的穩(wěn)定運行,為其簇發(fā)振蕩的控制研究提供了一定的參考,具有重要的研究意義。
1 水輪機調節(jié)系統(tǒng)的建模及簇發(fā)振蕩分析
1.1 兩時間尺度水輪機調節(jié)系統(tǒng)模型
以剛性水擊條件下的混流式水輪機調節(jié)系統(tǒng)為研究對象,其組成部分主要包括水輪機、發(fā)電機、液壓隨動系統(tǒng)和引水系統(tǒng)。水流經由引水系統(tǒng)到達水輪機,之后由水輪機將水流的勢能和動能轉化為機械能,再由發(fā)電機將機械能轉化為電能饋入電網。其中,液壓隨動系統(tǒng)是負責驅動導水機構進而控制進入水輪機的水流大小以實現機組轉速調整的裝置。其在剛性水擊時的非線性模型[17]如式(1)所示
(1)

由于液壓伺服系統(tǒng)中慣性的存在,導葉開度的變化量明顯慢于其他3個狀態(tài)變量,因此,可以加入時間標度因子ε(0<ε<1)來建立兩時間尺度耦合的水輪機調節(jié)系統(tǒng)無量綱模型如式(2)所示
(2)
1.2 水輪機調節(jié)系統(tǒng)簇發(fā)振蕩分析
為了分析時間尺度對水輪機調節(jié)系統(tǒng)非線性動力學行為的影響,系統(tǒng)參數取值如表1所示。

表1 水輪機調節(jié)系統(tǒng)參數Tab.1 Parameters of hydro turbine governing system
在MATLAB環(huán)境下對式(2)進行數值仿真。求解算法采用ode45,狀態(tài)變量初值選取(0.001,0.001,0.001,0.001),迭代步長0.013,迭代次數4 200次。取ε=0.16進行仿真,相軌跡圖和狀態(tài)變量時序圖如圖1所示。

圖1 水輪機調節(jié)系統(tǒng)快慢動力學行為Fig.1 Fast-slow dynamic behavior of hydraulic of hydraulic turbine governing system
觀察圖1可知,水輪機調節(jié)系統(tǒng)由于時間尺度差異而表現出明顯的快慢動力學行為,轉速相對偏差、機械力矩相對偏差、導葉開度相對偏差在時序圖和相圖中表現為沉寂態(tài)和激發(fā)態(tài)之間的來回轉遷,經過6 s左右的振蕩后即進入典型的周期簇發(fā)狀態(tài)。其中,轉速相對偏差和導葉開度相對偏差的高頻振蕩主要出現在峰值附近,而機械力矩相對偏差的高頻振蕩出現在額定值附近,且機械力矩相對偏差的波動范圍更大。考慮到簇發(fā)振蕩會影響水輪機調節(jié)系統(tǒng)的穩(wěn)定運行,因此需要設計控制器來抑制此現象。
2 水輪機調節(jié)系統(tǒng)的控制器設計
反步控制的原理是把原高階系統(tǒng)劃分成多個低階子系統(tǒng),然后分別對各個子系統(tǒng)構造Lyapunov函數和虛擬控制量,最后再通過一步步反推來設計系統(tǒng)的控制律。但是單獨的反步控制抗干擾性能較差,可以引入對不確定擾動的自適應律設計,同時加入滑模控制克服原系統(tǒng)的不確定性。
首先,將式(2)改寫為嚴格反饋形式,如式(3)所示
2.1 自適應反步滑模控制器設計
通過分析上述系統(tǒng)的結構可知,控制狀態(tài)變量δ,ω趨于穩(wěn)定即可實現對整個水輪機調節(jié)系統(tǒng)的控制。所以,針對式(4)所示系統(tǒng)進行控制律的設計可以實現推導過程的簡化。
(4)
式中:u為待設計的控制律;d為外部總擾動;f為中間變量,如式(5)所示
定義擾動估計誤差
(6)

狀態(tài)δ的跟蹤誤差
e1=δ-δd
(7)
式中,δd為狀態(tài)變量δ的期望軌跡。
取其虛擬控制量
(8)
狀態(tài)ω的跟蹤誤差
(9)
(10)
(11)
設計滑模面
s=λe1+e2
(12)
由式(12)可推出
(13)
取Lyapunov函數
(14)

(15)
取控制器如式(16)所示
式中,系數h,η,σ均大于0。
將式(16)代入式(15),得
構造正定矩陣
(18)
可得

(19)
取擾動自適應律為
(20)
即可使式(19)非負,穩(wěn)定性證明完畢。
2.2 基于浸入與不變原理的自適應反步滑模控制器設計
針對自適應反步滑模控制對擾動估計誤差的動態(tài)變化不可調節(jié)的不足,引入浸入與不變理論,對誤差估計建立流形如式(21)所示。
式中,β(δ,ω)為補償函數。
若上述流形保持不變,則待設計控制器的系統(tǒng)方程可表示為
(22)
式中:w為自適應律;z為擾動估計誤差。
只需設計合適的自適應律w和補償函數β即可保證流形M的不變和吸引。其中,基于浸入與不變原理的自適應反步滑模控制器(immersion and invariance-adaptive backstepping sliding mode controller,I &I-ABSMC)的初始設計部分和2.1節(jié)式(7)~式(10)完全相同,結合式(22)可得
(23)
設計滑模面
s1=λ1e1+e2
(24)
由式(24)可推出

(25)
取控制器如式(26)所示

[hs1+ηtanh(s1/σ)]+ke1
(26)
對擾動估計誤差z求導得
(27)
將式(22)代入式(27)得

(28)
通過分析式(28),取擾動自適應律w為
(29)
由式(28)和式(29)可得
(30)
取Lyapunov函數:V3=0.5z2,求導可得
(31)
令

(32)
由式(30)~式(32)可得
(33)
z=c2e-γ1t
(34)
式中:c2與z的初值相關;z呈指數收斂。

s1{ke1-z-[hs1+ηtanh(s1/σ)]}
(35)
取η>max|z|,c1+λ1>0,h>0,1+k=0,即可保證V4負定,基于浸入與不變原理的自適應反步滑模控制器設計完畢。
3 仿真驗證
3.1 I &I-ABSMC的參數分析
由于I &I-ABSMC的不同控制參數會對水輪機調節(jié)系統(tǒng)的狀態(tài)變量收斂以及擾動跟蹤的效果產生較大影響,所以進行了控制器參數變化時的對比試驗。其中,系統(tǒng)參數的選取參照表1,假設外部擾動d=12cos(0.1t),初始條件(0.001,0.001,0.001,0.001),δd=0。補償函數的偏導數γ1變化時機械力矩相對偏差的收斂曲線以及擾動跟蹤曲線如圖2所示,其余控制器參數選取:λ=1,c1=3,h=3,η=2,σ=0.1,λ1=1,k=-1。由圖2(a)可以觀察出,雖然不同的γ1取值均可以使控制器在有限時間內跟蹤到擾動的給定值,但是隨著γ1的不斷增大,基于浸入與不變原理的自適應反步滑模控制器對擾動跟蹤的超調量會明顯增加,且擾動的估計值會更慢地收斂到給定值。而且由圖2(b)可以分析出,γ1取不同值時機械力矩相對偏差收斂曲線完全重合,即改變γ1的取值不會影響機械力矩相對偏差的收斂狀況。
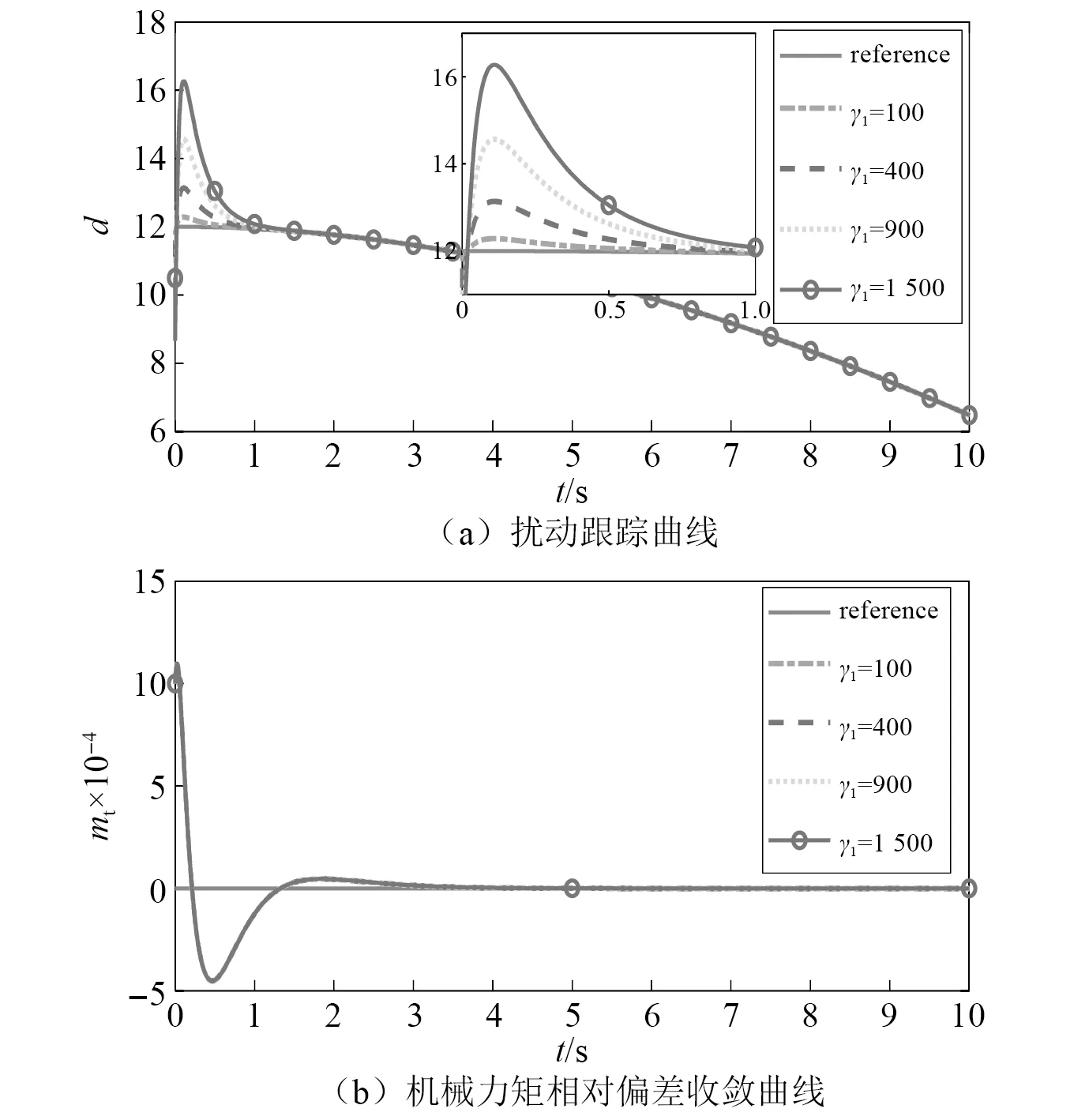
圖2 γ1變化時系統(tǒng)的響應曲線Fig.2 Response curve of the system when γ1 changes
控制器中參數σ的選取對水輪機調節(jié)系統(tǒng)的響應曲線的影響如圖3所示,此時其他控制參數的選取:λ=1,c1=3,h=3,η=2,λ1=1,σ=0.1,γ1=100,k=-1。從圖3(a)可知,隨著σ的增大,本控制器作用下的水輪機調節(jié)系統(tǒng)擾動估計值的超調量有一定的降低,但是在跟蹤擾動給定值的速度方面會更慢。由圖3(b)可以觀察出,更大的σ值會使其機械力矩相對偏差收斂曲線的超調更明顯,且收斂速度更慢。
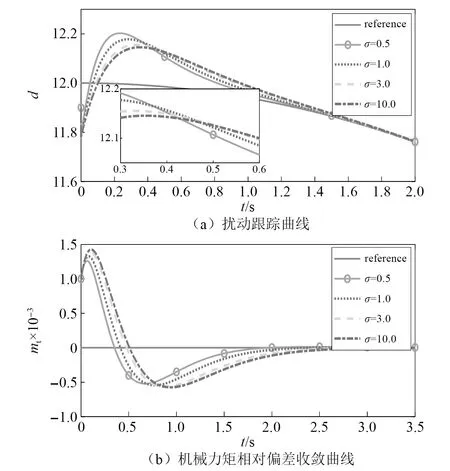
圖3 σ變化時系統(tǒng)的響應曲線Fig.3 Response curve of the system when σ changes
由以上分析可知,控制器參數應在合理的范圍內選取,γ1和σ取值越小則控制效果越好,為了不失一般性,本控制器取γ1=100,σ=0.1。其他控制參數的分析過程類似,不再贅述。其余控制器參數選取:λ=1,c1=3,h=3,η=2,λ1=1,k=-1。
3.2 不同控制器的控制效果對比
為了驗證I &I-ABSMC控制效果,將其與ABSMC和基于非線性干擾觀測器的自適應反步滑模控制器(nonlinear disturbance observer-ABSMC,NDO-ABSMC)進行對比試驗。
圖4給出了兩時間尺度水輪機調節(jié)系統(tǒng)的狀態(tài)變量在3種控制器作用下的收斂曲線。由圖4可得,上述3種控制器都可以實現水輪機調節(jié)系統(tǒng)簇發(fā)振蕩的抑制。但是,相比于其他2種控制方式,基于浸入與不變原理的自適應反步滑模控制具有收斂時間更短、過渡過程更平滑、狀態(tài)變量過沖更小的特點。由圖4(a)和圖4(b)可以分析出,發(fā)電機轉子角度相對偏差和轉速相對偏差在自適應反步滑模控制器的作用下收斂時間最長,過沖明顯更大。由圖4(c)和圖4(d)可以分析出,機械力矩相對偏差和導葉開度相對偏差在非線性干擾觀測器作用下的過沖更大,尤其是導葉開度相對偏差的最大過沖接近于其他2種控制方式的30倍且振蕩持續(xù)整個控制過程,在收斂時間較長時會進一步加劇系統(tǒng)的不穩(wěn)定。
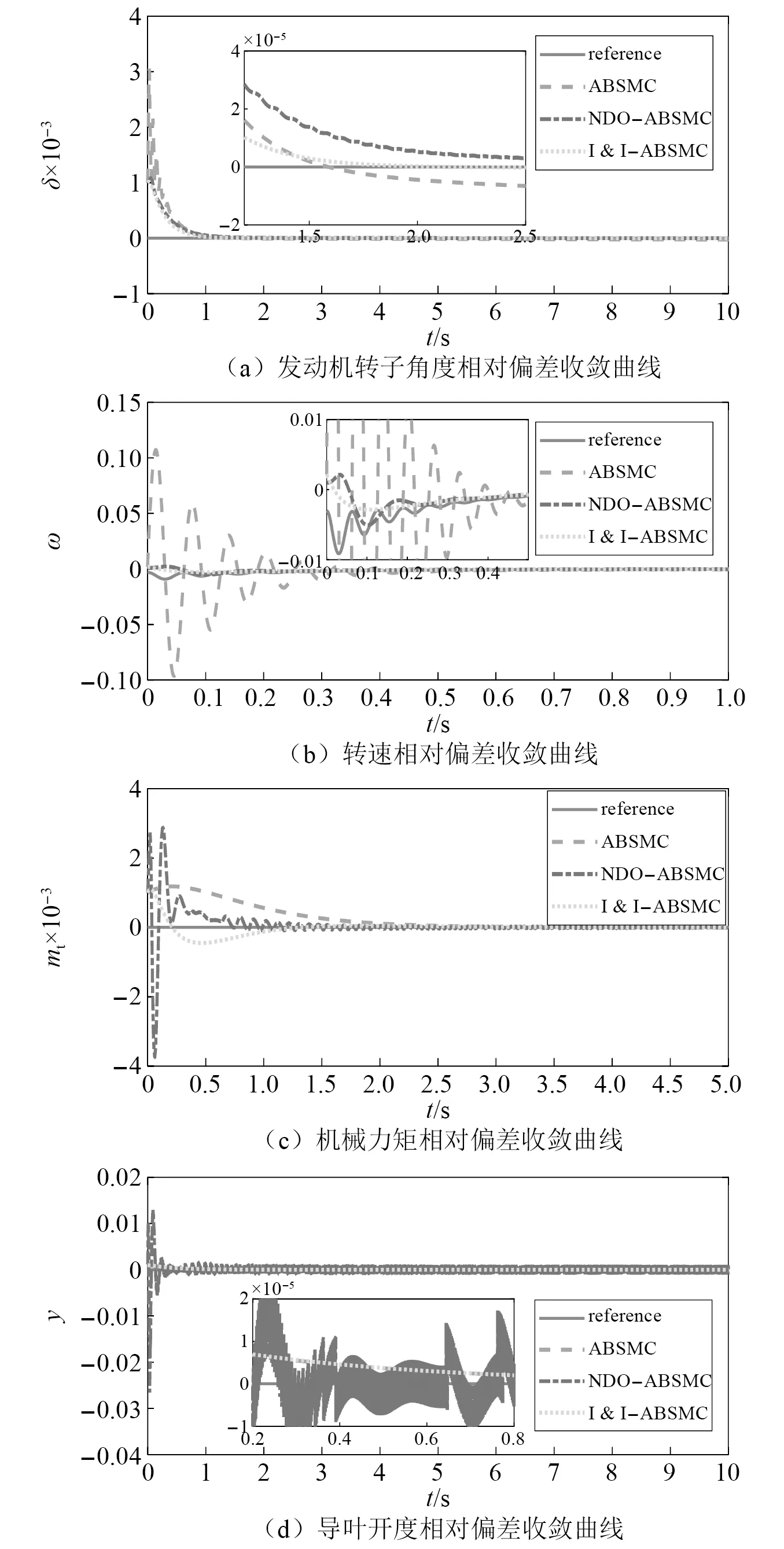
圖4 不同控制器時的狀態(tài)變量收斂曲線Fig.4 Convergence curves of state variables with different controllers
圖5顯示了3種控制器對擾動的估計情況,由圖5可以分析出,自適應反步滑模控制跟蹤擾動的速度明顯最慢且初始階段誤差最大。雖然基于浸入與不變原理的自適應反步滑模控制器和基于非線性干擾觀測器的反步滑模控制器在跟蹤擾動的速度方面相差無幾,但前一種控制器的擾動估計值和實際值之間的誤差明顯更小。
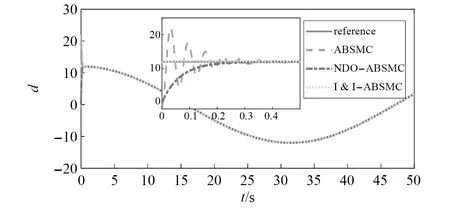
圖5 不同控制器時的擾動估計Fig.5 Estimation of disturbance with different controllers
可以看出,引入浸入與不變流形后,系統(tǒng)的簇發(fā)振蕩現象得到抑制的同時,其狀態(tài)變量的收斂速度和對外部擾動的適應能力相比于其他兩種控制策略都得到了一定的提高。
上述研究僅證明了I &I-ABSMC在系統(tǒng)發(fā)生簇發(fā)振蕩時具有較好的控制效果,為了驗證I &I-ABSMC在常規(guī)工況下的控制效果,取式(1)剛性水擊時的水輪機調節(jié)系統(tǒng)模型為被控對象,得到常規(guī)工況時系統(tǒng)在3種控制器作用下的狀態(tài)變量收斂曲線和擾動跟蹤效果如圖6所示。由圖6(a)和圖6(b)可知,機組常規(guī)工況下的發(fā)電機轉子角度相對偏差、轉速相對偏差在I &I-ABSMC的作用下收斂速度更快、超調量更小。但是在機械力矩相對偏差的收斂速度以及超調量方面,ABSMC表現較好。結合圖6(d)和圖6(e)的導葉開度相對偏差的收斂情況以及對擾動的跟蹤效果,I &I-ABSMC在全狀態(tài)范圍內的表現仍優(yōu)于其他2種控制策略。
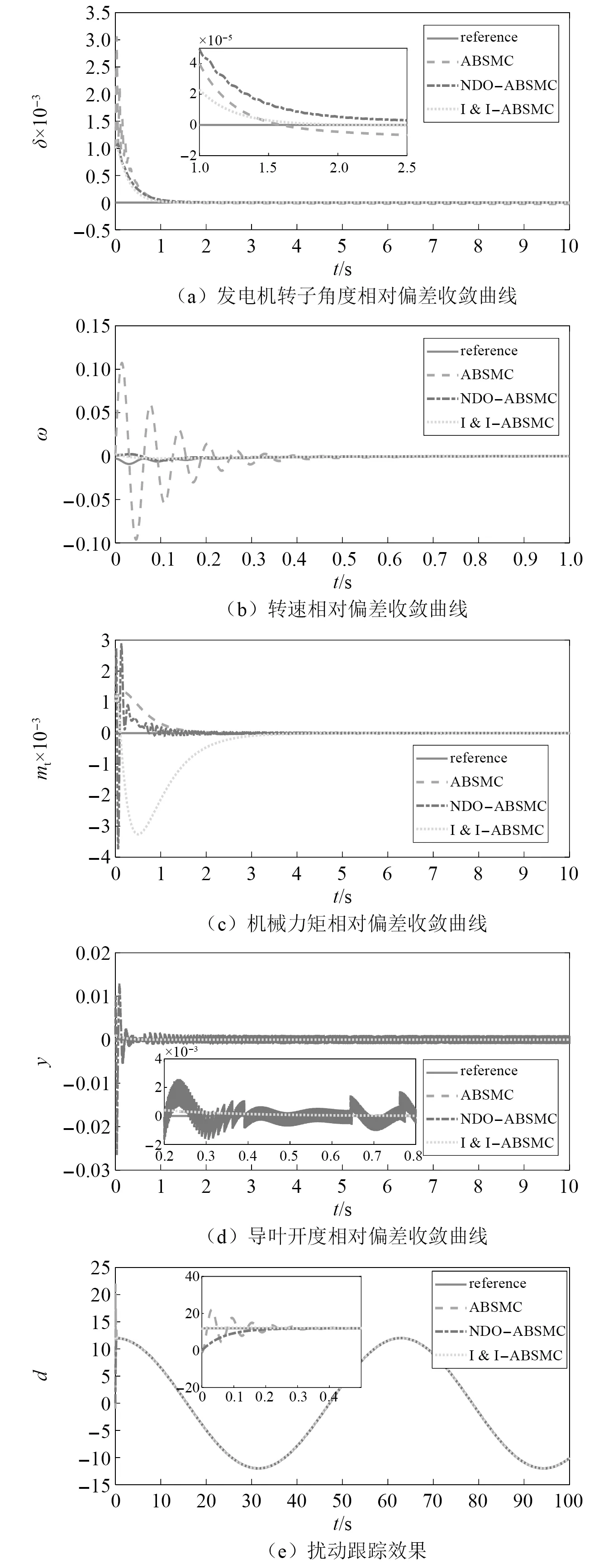
圖6 常規(guī)工況下的控制效果對比曲線Fig.6 Comparison curve of the control results under normal conditions
當機組在額定工況下運行時,水輪發(fā)電機組的功角應該等于電網的功角,即發(fā)電機轉子角度相對偏差δ=0;速度應該保持在額定速度,即轉速相對偏差ω=0;水輪機力矩應保持恒定,以維持水輪機轉速的穩(wěn)定,即水輪機機械力矩相對偏差mt=0;導葉開度為額定開度,即y=0[18]。考慮水輪機調節(jié)系統(tǒng)實際運行情況,若運行過程中發(fā)生失穩(wěn)行為會對整個系統(tǒng)造成極大的危害,為了證明本文所提方法對運行過程中失穩(wěn)行為的控制效果,假定在0.3 s時施加I &I-ABSMC控制器,其狀態(tài)變量的收斂曲線以及擾動的跟蹤效果如圖7所示。觀察圖7(a)~圖7(d)可知,加入控制器的瞬間,水輪機調節(jié)系統(tǒng)的發(fā)電機轉子角度相對偏差、轉速相對偏差、機械力矩相對偏差、導葉開度相對偏差經歷一定的過沖后均會在一定時間內收斂到穩(wěn)態(tài)。由圖7(e)可以分析出,擾動的估計值在加入控制器后出現了很大的超調,這與本控制器的控制參數γ1的選取有關,γ1取更小的值將極大的降低超調量。由圖7(f)可知,本系統(tǒng)中的基于浸入與不變原理的自適應反步滑模控制器的響應速度較快,控制量可以實現穩(wěn)定輸出。
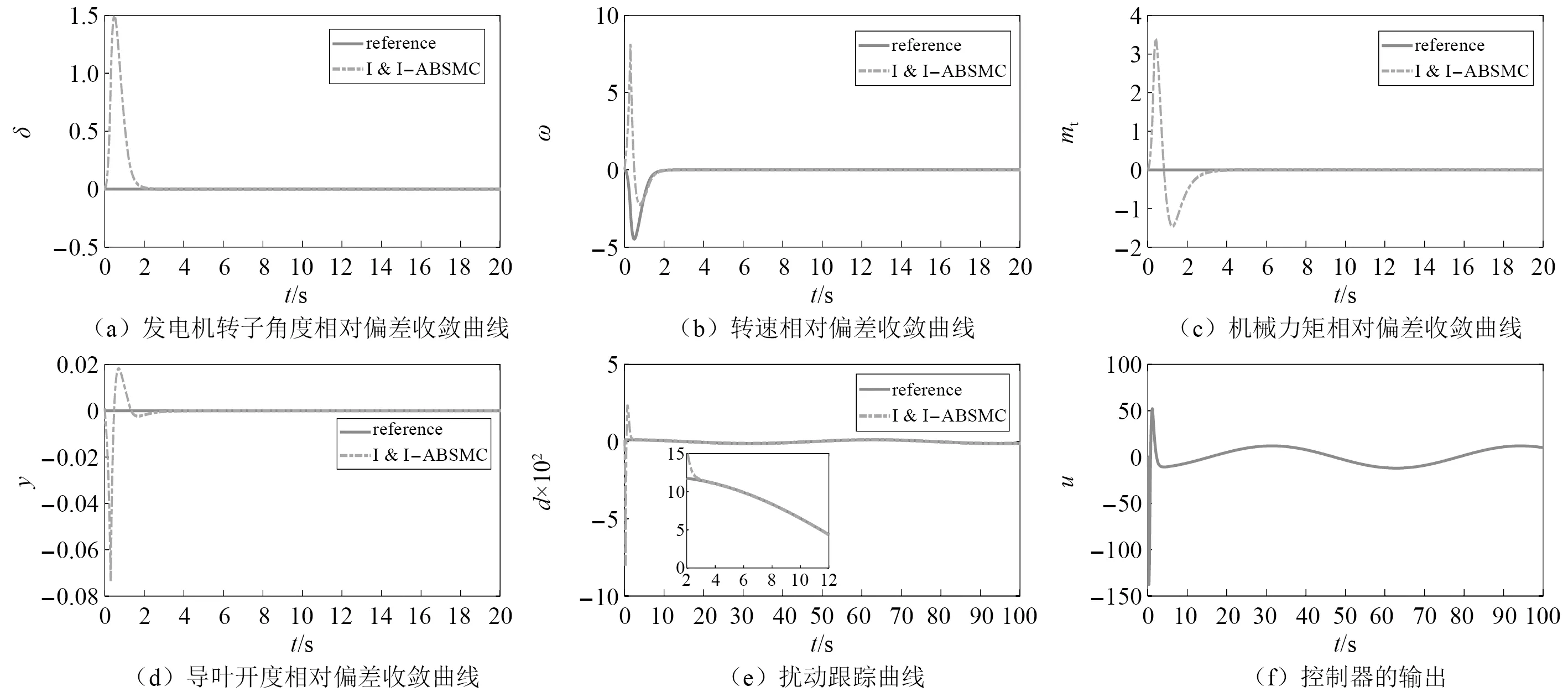
圖7 運行過程中加入控制器后的系統(tǒng)響應曲線Fig.7 Response curve of the system after adding controller during operation
上述分析均是在水輪機調節(jié)系統(tǒng)于初始時刻即存在擾動的情形下進行的,但是實際中擾動往往是在系統(tǒng)運行過程中突然加入,因此,為了進一步驗證控制器的魯棒性,假設在3 s時施加擾動d,其取值同3.1節(jié)。仿真結果如圖8所示,綜合圖8(a)~圖8(d)可知,突加擾動后,I &I-ABSMC作用下的水輪機調節(jié)系統(tǒng)各狀態(tài)變量的收斂速度和超調量方面仍然更優(yōu),其他兩種控制策略在部分狀態(tài)變量上表現尚可,但是在全狀態(tài)范圍內的表現較差,即具有較差的魯棒性。由圖8(e)可知,I &I-ABSMC以極快的速度跟蹤擾動,而NDO-ABSMC跟蹤擾動時雖然超調量和I &I-ABSMC幾乎一致,但是約0.3 s才實現完全跟蹤,速度明顯更慢。可以很明顯的看出,ABSMC在跟蹤擾動時超調量明顯更大,且擾動的估計值和實際值約0.4 s才重合。由以上分析可知,突加擾動時I &I-ABSMC依然具有更好的表現。
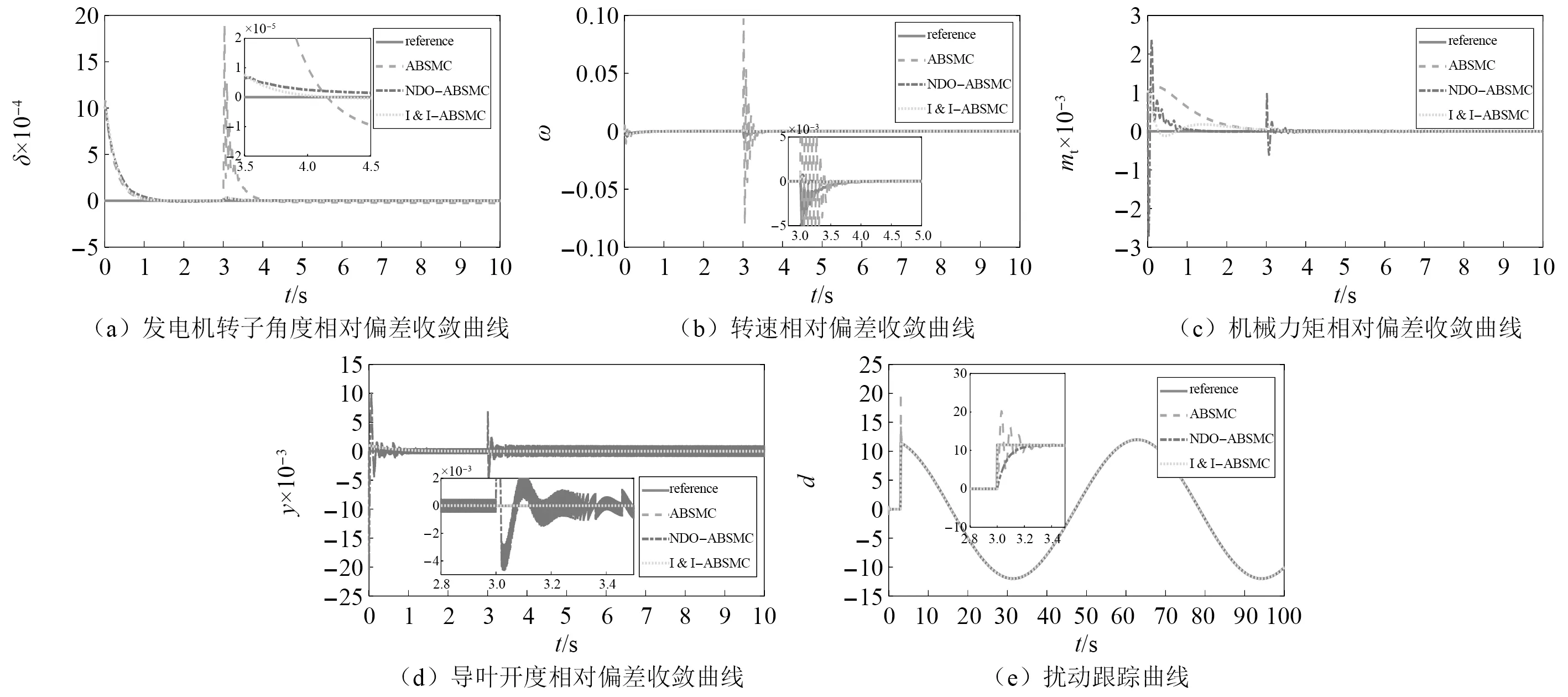
圖8 突加擾動的控制效果對比曲線Fig.8 Comparison curve of the control results after sudden disturbance
4 結 論
本文以水輪機調節(jié)系統(tǒng)為研究對象,利用兩時間尺度四階水輪機調節(jié)系統(tǒng)模型,通過相圖和時序圖分析了其簇發(fā)振蕩行為。對于水輪機調節(jié)系統(tǒng)的簇發(fā)振蕩抑制問題,設計了3種基于反步法和滑模理論的控制器進行對比試驗。相同條件下的仿真結果表明:在保證水輪機調節(jié)系統(tǒng)穩(wěn)定運行的前提下,相比于自適應反步滑模控制和基于非線性干擾觀測器的反步滑模控制,基于浸入與不變原理的自適應反步滑模控制解決了傳統(tǒng)方法對擾動的估計不足導致的跟蹤性能較差的問題。同時,機組常規(guī)工況下的對比試驗進一步驗證了基于浸入與不變原理的自適應反步滑模控制的通用性。通過進行水輪機調節(jié)系統(tǒng)實際運行過程中控制器的延時施加以及擾動的突然加入這兩組試驗,證明了本控制方法具有較強的魯棒性。本文所提控制策略亦可以應用到更高階的水輪機調節(jié)系統(tǒng)簇發(fā)振蕩行為的抑制中。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
