汽車ESC系統干預轉向不足性能測評與研究*
2023-09-04 08:10:18牛成勇吳昆倫王戡蘇占領周祥祥
汽車文摘 2023年9期
牛成勇 吳昆倫 王戡 蘇占領 周祥祥
(1.招商局檢測車輛技術研究院有限公司 國家智能網聯汽車質量檢驗檢測中心(重慶),重慶401329;2.汽車主動安全測試技術重慶市工業和信息化重點實驗室,重慶401329;3.自動駕駛系統及智能網聯汽車技術研發與測試應用重慶市工程研究中心,重慶401329)
0 引言
汽車電子穩定性控制系統(Electronic Stability Control,ESC)是一種輔助駕駛員有效控制車輛的主動安全設備,其通過對車輪制動力和發動機輸出扭矩進行調整,限制車輛側偏角發生急轉,并保證車輛側偏角始終處于一定范圍內,以獲得足夠的橫擺力矩增益。據美國高速公路交通安全局(NHTSA)的分析數據表明,使用ESC 能減少34%的乘用車和59%的SUV單車碰撞事故,還可有效地預防71%的乘用車和84%的SUV翻車事故[1-2]。
目前,隨著汽車智能化、電動化的不斷發展以及消費者對車輛安全性的關注日益提高,加之國家相關標準法規的陸續發布、實施,ESC系統已大量裝備于汽車上,其在行車安全上的優勢已被全球汽車生產廠家和汽車使用者認可,使其成為繼ABS 技術之后,保護車內駕乘人員生命安全非常重要的主動安全技術[3-4]。
鑒于不同ESC生產企業的ESC控制策略差異所帶來的系統性能優劣性,裝備ESC系統的車輛必須滿足法規規定試驗的性能要求,以保證其對車輛極限工況下出現的轉向過度(后軸側滑)、轉向不足(前軸側滑)問題有足夠的干預,使車輛進入穩定工況。然而,在國內外ESC性能測試及評價體系中只涉及系統對車輛過度轉向的控制性能測試,均未對極限工況(或危險工況)下ESC干預轉向不足的性能試驗及評價指標作明確規定。也就是說,如何有效解決車輛在極限工況(或危險工況)的轉向不足,并制定合理的評價指標,評價ESC系統轉向不足控制性能在國內外尚屬于空白領域。
根據國內外ESC系統測試與評價研究現狀,其在干預轉向不足性能測試技術方面主要存在以下3個問題:
(1)試驗方案的合理性
NHTSA 實施的正弦延遲試驗(Sine With Dwell,SWD)能較好地評價系統對過度轉向的干預性能,而對轉向不足的干預性能卻無能為力。在低附著系數路面上更容易激發出車輛嚴重的轉向不足趨勢,但試驗結果很難明確地對ESC 控制轉向不足的性能進行評價。因此,制定合理的試驗方案是評價ESC 控制轉向不足性能的關鍵。
(2)評價指標的客觀性
針對可能激發出車輛嚴重轉向不足的試驗工況,如冰雪路面上的雙移線或穩態回轉試驗,都會受駕駛員輸入的影響,很難對ESC 性能進行定量評價。即使根據經驗選取一些評價指標,但其評價指標是否客觀、合理,有待于試驗驗證和進一步考量。因此,制定客觀的評價指標是評價ESC控制轉向不足性能的重點。
(3)試驗場地的規范性
目前,在國內符合法規標準要求的ESC 試驗場地主要由企業建設,存在一些諸如路面附著系數測定方面問題。盡管在低附著系數路面(如冰雪路面、灑水路面)更容易激發出車輛因轉向不足而引發的前軸側滑,但是缺乏相關的標準試驗場地開展轉向不足試驗研究和驗證工作。因此,建立規范的試驗場是評價ESC控制轉向不足性能的基礎。
1 ESC系統對車輛橫擺穩定性的影響
ESC 系統能通過傳感器信號準確識別車輛行駛狀態,預估不穩定狀態,并通過限制發動機扭矩輸出及控制各車輪與地面的附著力,實現對轉向不足和過度轉向的干預,達到修正轉向、調整車輛不穩定姿態的控制效果[5-8]。
當車輛出現如圖1 所示的轉向不足工況或趨勢時,ESC 系統將對車輛后軸內側車輪4實施制動,產生一個順時針方向的附加橫擺力矩,使車輛沿駕駛員的期望路徑偏轉。具體原理是,在輪胎與路面極限附著工況下,車輪所受的縱向力與側向力的合力基本不變。當ESC系統增加某一車輪的制動力FB時,勢必會導致該車輪受到的側向力FS減小,在其它車輪所受地面側向力基本不變的情況下,最終引起4 個輪胎的合力轉動,即對車身產生了一個補償橫擺力矩,如圖2所示。其中,V為車輛前進方向速度;α為輪胎側偏角;λ為滑移率;δ為車輪轉角;FS(λ0)、FB(λ0)、FR(λ0)分別為滑移率為λ0時,輪胎所受地面的側向力、縱向力和合力。

圖1 ESC系統工作原理
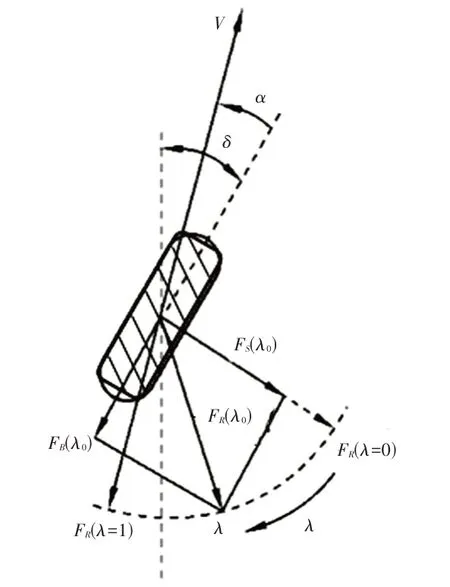
圖2 單個輪胎受力分析
當單獨制動車輪4不足以改變車輛的轉向不足狀態時,系統將通過制動其它車輪或降低發動機輸出扭矩來滿足要求。
2 某商用車ESC系統聯合仿真分析
2.1 基于ADAMS/Car建立整車模型
2.1.1 整車模型簡化
簡化原則為:
(1)將除輪胎、彈簧、阻尼元件等柔性體外的其余部件均按剛性體處理。
(2)忽略零部件之間的摩擦力影響。
(3)車身質量簡化在整車質心位置[9-10]。
2.1.2 搭建整車子系統模型
根據表1所列的國內某商用車(營運客車)關鍵性能參數,利用ADAMS/Car 軟件的模板生成器,依次建立前懸架模型、后懸架模型、轉向系統模型、輪胎模型、動力系統(發動機)模型、制動系統模型以及路面模型并建立各子系統之間的通訊器。
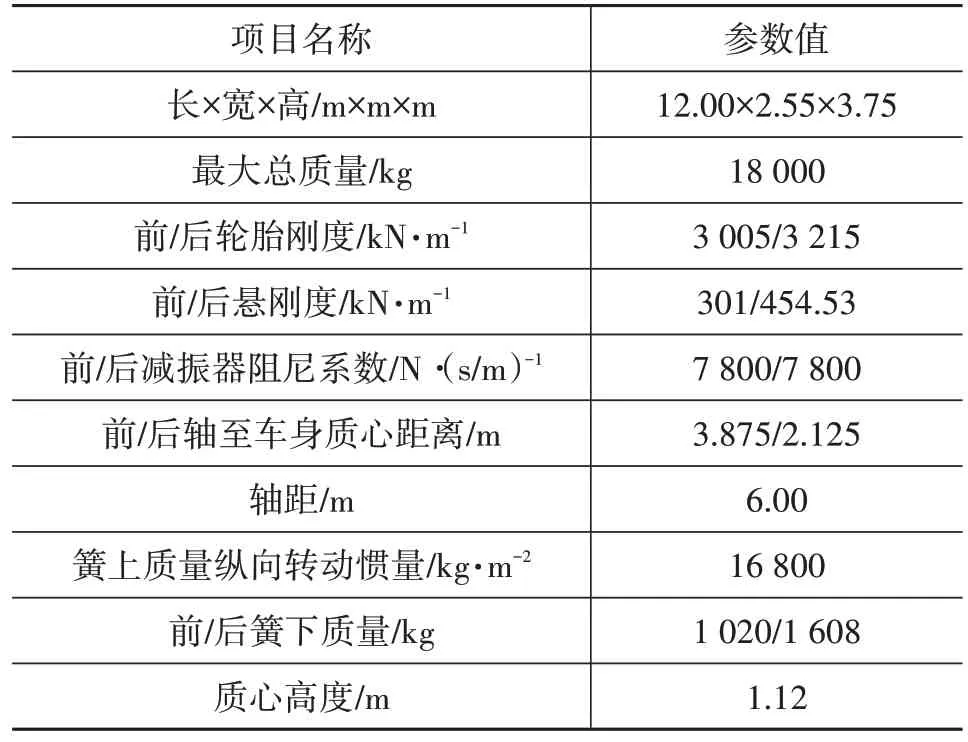
表1 國內某商用車性能關鍵參數表
2.1.3 整車模型裝配及調試驗證
將搭建好的各大子系統模型進行組裝和調試,從而裝配成整車動力學仿真模型,如圖3所示。
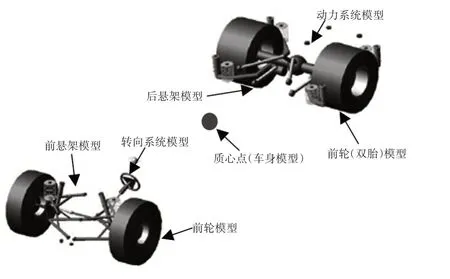
圖3 整車模型
利用建立好的整車模型進行MATLAB/Simulink聯合仿真。按表1 配置的整車進行了試驗,試驗工況采用與仿真相同的工況。將仿真結果與試驗結果進行對比,以檢驗整車模型的合理性、準確性。本文采用的是蛇形仿真來檢驗整車模型。對于大型商用車而言,滿載試驗時,蛇行試驗標準場景要求標樁間距為50 m,試驗車速為50 km/h。車輛橫擺角速度和車身側傾角的仿真與試驗對比結果如圖4和圖5所示。

圖4 橫擺角速度響應對比
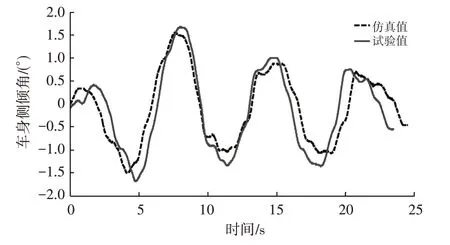
圖5 車身側傾角響應對比
通過對比結果可知,橫擺角速度和車身側傾角參數在模型仿真和實車試驗中數值差別較小,在合理的可接受范圍內,從而證明該模型具有一定的準確性,為后續的進一步聯合仿真分析奠定了基礎。
2.2 基于MATLAB/Simulink建立ESC控制系統
針對ESC 系統控制特點,為了更精確地控制汽車行駛狀態,采用橫擺角速度ω和質心側偏角β作為控制輸入量,采用PID 控制方法,分別設計2 個PID 控制器,經過加權后形成聯合控制器,輸出量為橫擺力矩[10],其控制系統框如圖6所示。
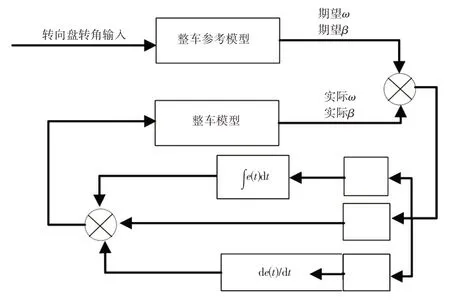
圖6 整車PID控制
在Simulink 中建立基于PID 控制的ESC 仿真模型,如圖7所示。
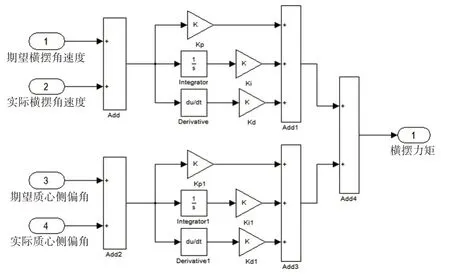
圖7 整車PID控制器模塊
2.3 基于PID控制的某商用車ESC性能聯合仿真
整個聯合仿真系統由3 部分構成:ADAMS/Car 整車模型、整車參考模型和控制系統,如圖8所示。
結合ADAMS/Car整車模型和控制系統,經反復仿真驗證,采用如下方法可以較容易激發車輛轉向不足趨勢,并能有效驗證ESC系統的干預控制能力:
(1)在路面附著系數為0.3(低附著系數路面)上進行“雙移線”行駛工況。
(2)車輛滿載時載荷布置方式為“前輕后重”(前后軸荷比為0.35)。
在選取50 km/h 的仿真速度環境下,車輛進行“雙移線”試驗。在ESC 系統開啟和關閉2 種狀態下行駛軌跡對比如圖9所示。
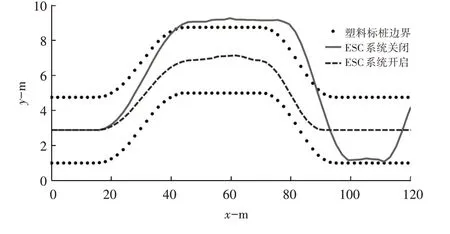
圖9 車輛行駛軌跡
通過ADAMS 和Simulink 聯合仿真結果可以看出,在低附著系數路面、整車載荷差異性布置(質心后移)的測試條件下,雙移線試驗可激發車輛轉向不足。ESC 系統能有效地對車輛在危險狀況下的轉向不足進行干預控制,提高變道行駛安全性。
該仿真結果在一定程度上說明了本文所提出的激活車輛轉向不足趨勢的方法及考察ESC 系統的干預轉向不足性能是可行的,為后續實車測試驗證提供了支撐。
3 某商用車ESC系統性能實車測評
3.1 ESC性能測試系統介紹
目前應用于ESC性能測試系統如圖10所示,主要包括以下部分:
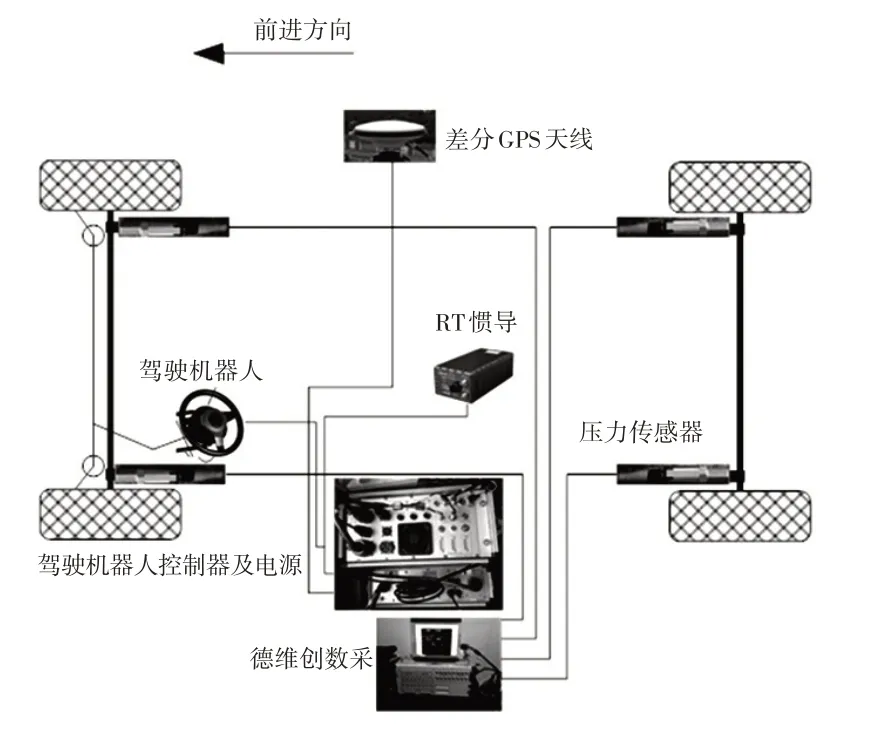
圖10 ESC性能測試系統組成示意
(1)駕駛機器人:可精確控制車輛,按設定路徑、角度行駛;控制車輛行駛車速的穩定性以保障測試結果一致性。
(2)組合慣導系統:可實現車輛相關動態參數的高精度實時測量,并保證定位精度達到厘米級。
(3)德維創數據采集系統:可采集制動氣室壓力和發動機扭矩、轉速信息。
3.2 ESC干預轉向不足性能測評方法
3.2.1 測試方法概述
車輛滿載且前后軸荷比為0.35。按照圖11 所示的測試場景,在低附著系數路面上布置標志樁,且確保ESC 關閉裝置正常,測試在ESC 開啟和關閉2 種狀態下分別進行。
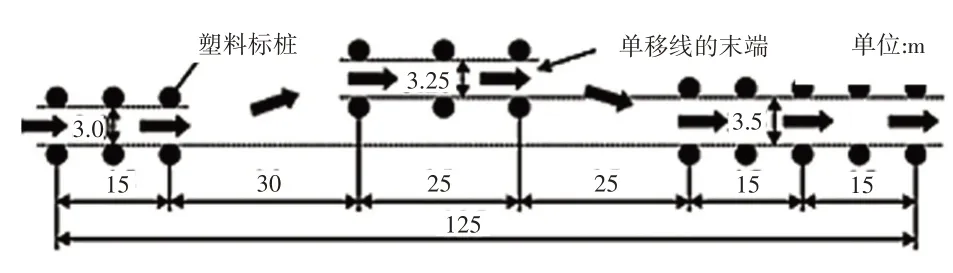
圖11 雙移線測試場景示意
為保證測試安全,測試從30 km/h 的車速開始,以5 km/h 的幅度逐步增加測試車速。如果車輛在通過測試通道過程中,未接觸任何標志樁,也未偏離測試通道,則認為測試有效。否則,終止測試。
測試過程中,將車輛運行軌跡控制在雙移線軌道中。在第1 個標志樁處保持加速踏板位置不變,并觸發記錄該瞬間的車速,且全程不采取制動操作(除非車輛達到失穩狀態),僅通過調整轉向盤來控制車輛。
3.2.2 評價指標
在低附著系數路面下的雙移線避障行駛工況中,能夠在不觸碰標志樁,且不偏離行駛軌跡的前提下,“進入(入口)車速”的高低能直接體現ESC 對車輛轉向不足的控制性能。
3.3 實測驗證分析
以某商用車(營運客車)為測試樣車,以駕駛機器人控制行駛路徑和車速,在低附著系數路面上完成“雙移線”驗證測試,如圖12所示。
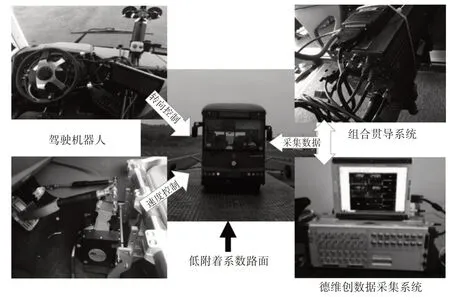
圖12 測試樣車及測試設備
經實測發現,在ESC系統開啟和關閉2種狀態下,車輛的最高入口車速分別為55.6 km/h 和43.0 km/h,即車輛在裝備ESC 系統后的操縱穩定性改善程度(最高入口車速改變量)為:
式中,φ為操縱穩定性改善程度;VmaxESC ON為ESC 系統開啟時的最高入口車速;VmaxESC OFF為ESC 系統關閉時的最高入口車速。
車輛在入口車速為43 km/h、ESC系統開啟和關閉2種狀態下的行駛軌跡、橫擺角速度、側向加速度對比參數分別如圖13~圖15 所示。在ESC 系統開啟時,車輛各車輪制動氣壓值如圖16所示。
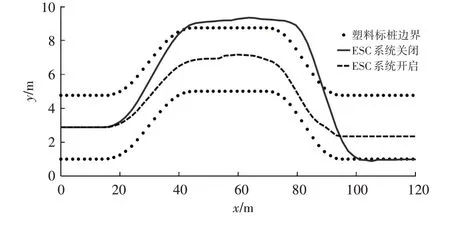
圖13 車輛行駛軌跡
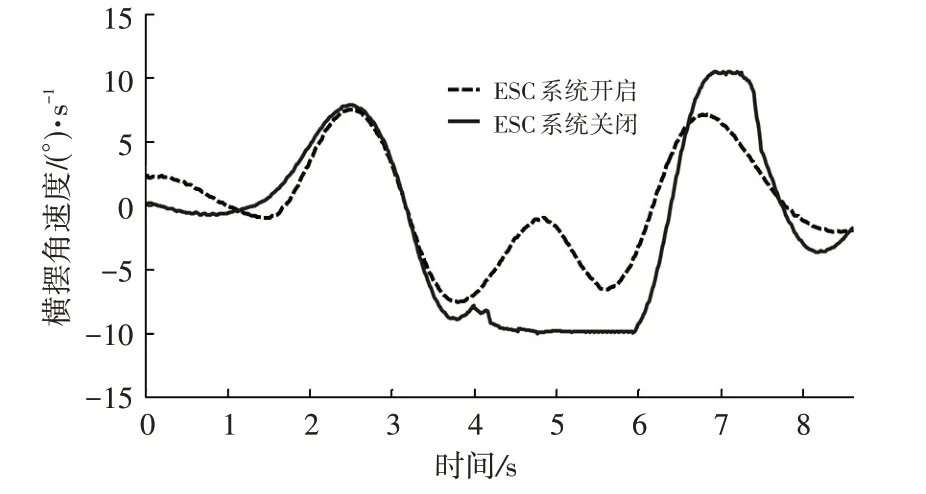
圖14 車輛橫擺角速度
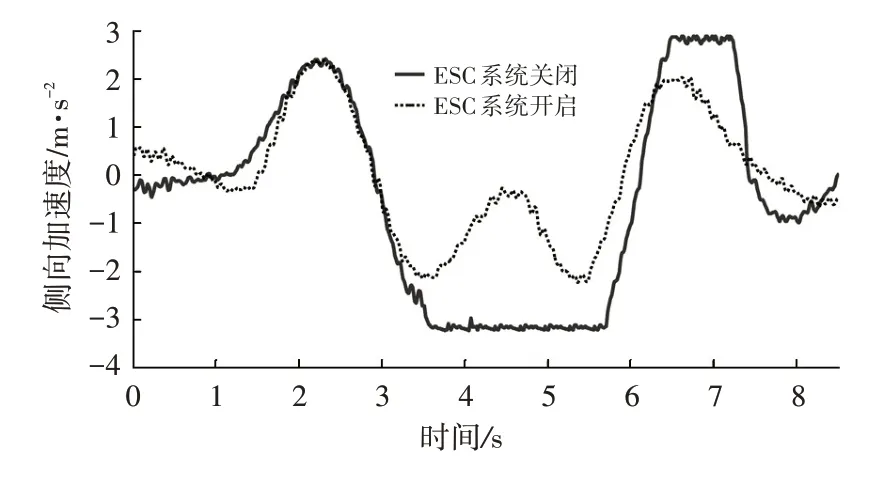
圖15 車輛側向加速度
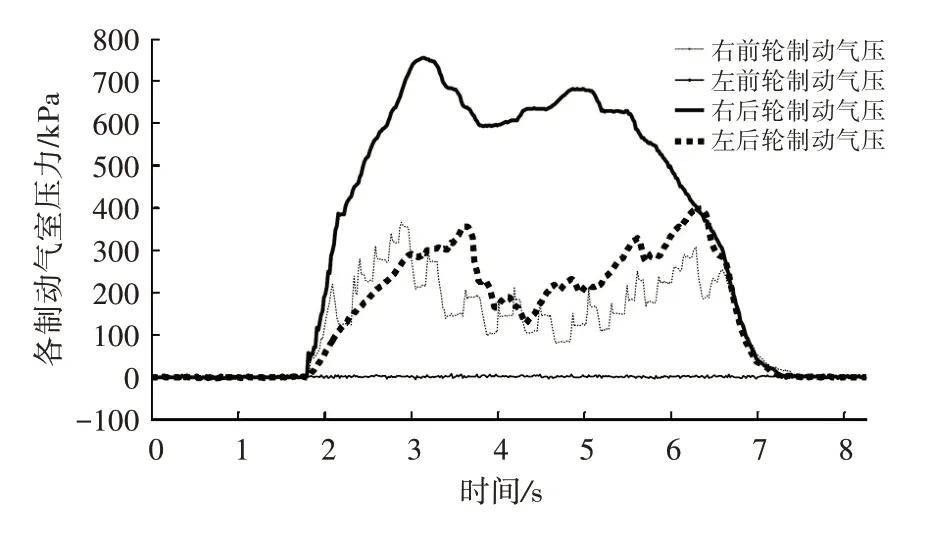
圖16 ESC功能開啟時的車輪制動氣壓
從圖13~圖15 的對比參數及圖16 中的各車輪制動氣室壓力可以看出,在ESC 系統失效狀態下,車輛的實際運動軌跡已經明顯偏離期望運動軌跡,表現為明顯的轉向不足。橫擺角速度、側向加速度峰值及相應的持續時間也明顯增大,車輛即將失控的態勢表現明顯。與之相反,車輛在ESC 系統作用下,右后輪制動氣室壓力值(制動氣壓峰值約為750 kPa)明顯大于其它車輪制動氣室壓力值,根據前述理論分析可知,車輛便獲得一個較大的附加橫擺力矩,使其轉向不足趨勢得到有效控制,路徑跟隨能力明顯改善。
4 結束語
結合聯合仿真結果和實車測試數據可以看出,當車輛載荷進行“前輕后重”式的差異性布置,在低路面附著系數的測試條件下,通過“雙移線”變道試驗可有效激發車輛轉向不足趨勢,且ESC 系統可有效控制因轉向不足趨勢而帶來的失控風險。
因此,本文所提出的針對車輛ESC 控制轉向不足性能的測評方法,能凸顯ESC 系統轉向不足失控控制性能,完善了ESC測試評價體系。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19