8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)遠(yuǎn)場(chǎng)干擾試驗(yàn)
2023-09-02 05:24:38劉李濤黃志遠(yuǎn)范利濤李小兵
空氣動(dòng)力學(xué)學(xué)報(bào) 2023年7期
劉李濤,黃志遠(yuǎn),陳 洪,范利濤,李小兵,劉 硯
(中國(guó)空氣動(dòng)力研究與發(fā)展中心 低速空氣動(dòng)力研究所,綿陽(yáng) 621000)
0 引言
風(fēng)洞試驗(yàn)中,模型支撐裝置的存在會(huì)對(duì)模型表面及其附近流場(chǎng)產(chǎn)生影響(磁懸浮除外),從而對(duì)測(cè)量的模型氣動(dòng)數(shù)據(jù)帶來(lái)干擾[1-2],有些測(cè)量值甚至?xí)?yán)重偏離真實(shí)結(jié)果。國(guó)內(nèi)外研究者針對(duì)風(fēng)洞試驗(yàn)支撐干擾問(wèn)題進(jìn)行了大量的研究,探索出了許多支撐設(shè)計(jì)優(yōu)化和工程修正方法,并積累了寶貴的經(jīng)驗(yàn)[3-12]。
中國(guó)空氣動(dòng)力研究與發(fā)展中心低速空氣動(dòng)力研究所8 m×6 m 低速風(fēng)洞(FL-13)主力支撐裝置為懸臂支撐機(jī)構(gòu),運(yùn)輸類飛機(jī)模型主要采用基于該機(jī)構(gòu)的斜腹撐形式支撐(如圖1 所示)試驗(yàn),該支撐裝置由翼型支桿、直支桿、攻角頭、懸臂和雙立柱等部分組成。

圖1 8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)Fig.1 The cantilever support device in 8 m×6 m wind tunnel
文獻(xiàn)[13]中的DNW-LLF 風(fēng)洞模型支撐系統(tǒng)與8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)相似,均存在“懸臂”的特征,基于對(duì)該類支撐干擾的物理模型分析,可將其支撐干擾分解為近場(chǎng)干擾和遠(yuǎn)場(chǎng)干擾。尾流直接作用于模型的支撐干擾一般定義為近場(chǎng)干擾,而尾流不直接作用于模型的支撐干擾一般定義為遠(yuǎn)場(chǎng)干擾(如圖2 所示)。
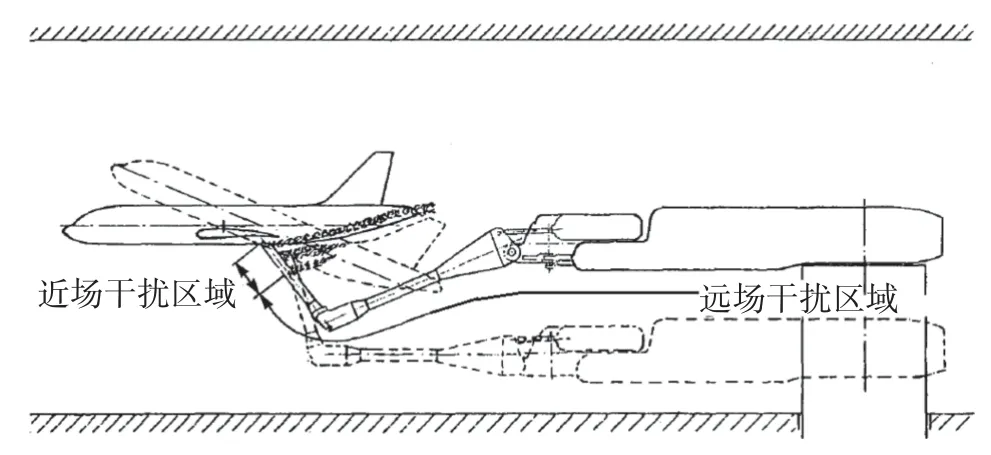
圖2 DNW-LLF 風(fēng)洞支撐裝置近場(chǎng)和遠(yuǎn)場(chǎng)干擾Fig.2 Near-field and far-field interferences of support device in DNW-LLF wind tunnel
DNW-LLF 風(fēng)洞支撐干擾的分解是基于氣動(dòng)干擾模型建立的。本文研究過(guò)程中,結(jié)合8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)支撐干擾試驗(yàn)方法,對(duì)上述支撐干擾分解進(jìn)行了調(diào)整:將可通過(guò)支撐干擾試驗(yàn)?zāi)M的翼型支桿、直支桿、攻角頭定義為近場(chǎng)支架,將不能(或難以)通過(guò)支撐干擾試驗(yàn)?zāi)M的懸臂和雙立柱定義為遠(yuǎn)場(chǎng)支架(如圖3 所示)。
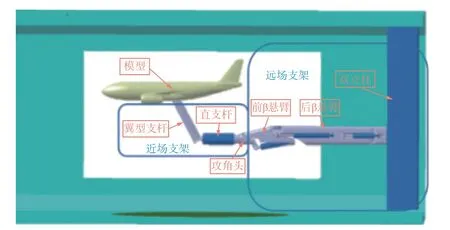
圖3 8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)近場(chǎng)和遠(yuǎn)場(chǎng)支架Fig.3 Near-field and far-field parts of the cantilever support in 8 m×6 m wind tunnel
可見(jiàn),按照8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)支撐干擾試驗(yàn)方法,遠(yuǎn)場(chǎng)干擾量通常難以直接獲取,而遠(yuǎn)場(chǎng)干擾中的懸臂干擾量在某些情況下又不能簡(jiǎn)單忽略,在一定程度上影響了試驗(yàn)數(shù)據(jù)準(zhǔn)確度,應(yīng)當(dāng)對(duì)遠(yuǎn)場(chǎng)懸臂干擾特性進(jìn)行研究和修正。本文針對(duì)懸臂干擾特點(diǎn),在8 m×6 m 低速風(fēng)洞采用流場(chǎng)測(cè)量和典型模型(主要為CHN-T1 標(biāo)模[14-16])測(cè)力試驗(yàn)方法進(jìn)行了研究。
1 懸臂支撐機(jī)構(gòu)遠(yuǎn)場(chǎng)干擾誤差分析
為分析 8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)遠(yuǎn)場(chǎng)懸臂干擾的誤差,對(duì)模型4 種試驗(yàn)狀態(tài)定義如圖4 所示:A 狀態(tài)為“腹撐”狀態(tài)(基本試驗(yàn)狀態(tài)),B1 狀態(tài)為“背撐+假腹撐”狀態(tài),B2 狀態(tài)為“腹撐+假背撐”狀態(tài),C 狀態(tài)為“背撐”狀態(tài)。
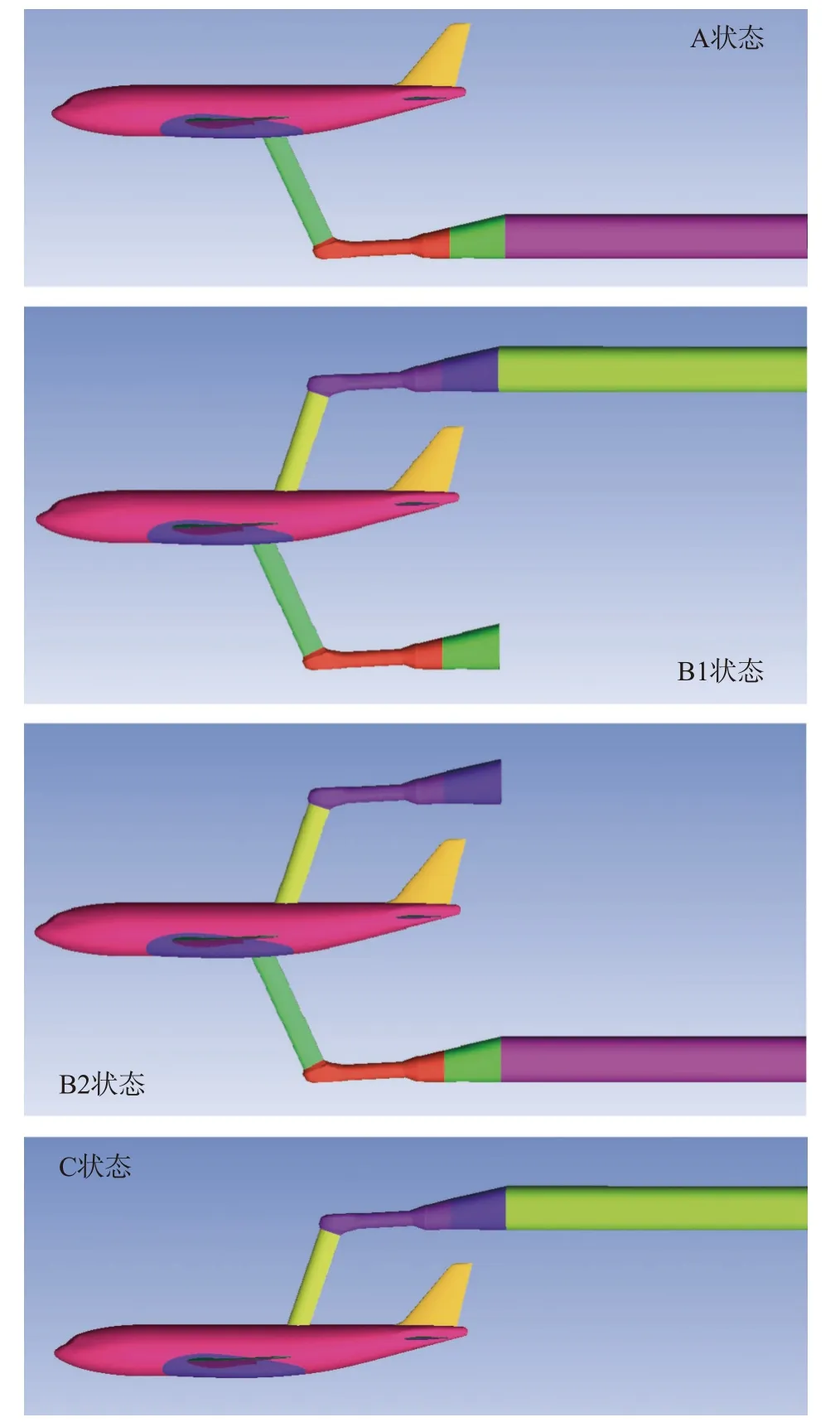
圖4 8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)試驗(yàn)狀態(tài)定義Fig.4 State definition of the cantilever support device in 8 m×6 m wind tunnel
本文分別采用兩種方法進(jìn)行“兩步法”支撐干擾試驗(yàn),獲取A 狀態(tài)(腹撐)支撐干擾量:方法一通過(guò)B1 狀態(tài)和C 狀態(tài)獲得,方法二通過(guò)B2 狀態(tài)和C 狀態(tài)獲得,兩種方法獲取A 狀態(tài)支撐干擾量的計(jì)算公式如下:
其中,F(xiàn)表示氣動(dòng)力量值,ΔF表示氣動(dòng)力差量,下標(biāo)zj_A表示A 狀態(tài)支架,下標(biāo)B1、B2、C 分別表示B1 狀態(tài)、B2 狀態(tài)、C 狀態(tài)。
方法一:B1 狀態(tài)未模擬腹撐懸臂和雙立柱,獲得的支撐干擾量可表述為:
方法二:B2 狀態(tài)未模擬背撐懸臂和雙立柱,獲得的支撐干擾量可表述為:
可見(jiàn),方法二相對(duì)方法一獲得的支撐干擾差量可表述為:
兩種支撐干擾試驗(yàn)方法中,攻角頭后部斷面形成的死水區(qū)通常只能小部分模擬懸臂體積效應(yīng)干擾,同時(shí),當(dāng)懸臂存在洗流(模型迎角或側(cè)滑角較大,有明顯升力或側(cè)力)時(shí),懸臂干擾特性將發(fā)生一定變化,導(dǎo)致兩種方法獲得的支撐干擾量均存在一定不足,實(shí)際上,理論腹撐支撐干擾量可表述為:
可見(jiàn),方法一和方法二獲得的支撐干擾量均存在缺項(xiàng),缺項(xiàng)分別為:
其中,ΔF腹撐懸臂和 ΔF背撐懸臂量值與模型及其部件相對(duì)懸臂的位置和距離密切相關(guān),同時(shí)還會(huì)受到攻角頭模擬大小(部分模擬懸臂體積效應(yīng))和洗流大小的影響。由于雙立柱距離模型區(qū)較遠(yuǎn),ΔF雙立柱一般可忽略。
本文在8 m×6 m 低速風(fēng)洞對(duì)CHN-T1 低平尾布局標(biāo)模(圖5)和某高平尾布局模型采用上述兩種方法進(jìn)行了支撐干擾試驗(yàn),圖6 和圖7 給出了腹撐干擾量曲線(未光順)。其中,“B1-C”和“B2-C”分別表示方法一和方法二獲得的支撐干擾量;“Low HT”和“High HT”分別表示低平尾和高平尾布局模型。

圖5 CHN-T1 標(biāo)模支撐干擾試驗(yàn)Fig.5 Support interference test of CHN-T1 standard model
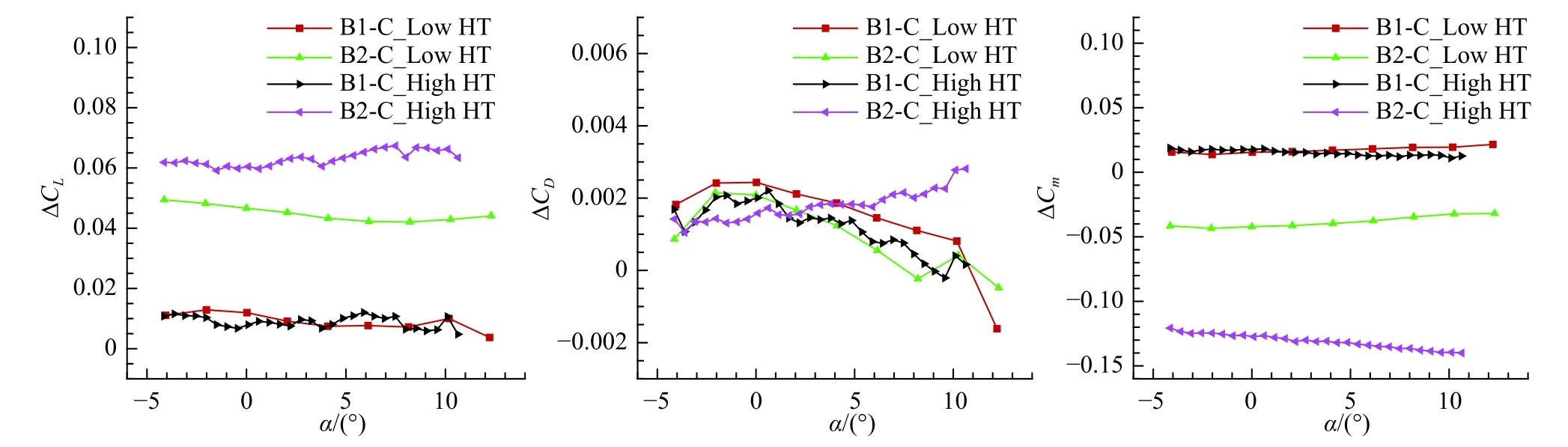
圖6 懸臂支撐機(jī)構(gòu)腹撐干擾量曲線(縱向)Fig.6 Aerodynamic interference of the cantilever support (longitudinal)
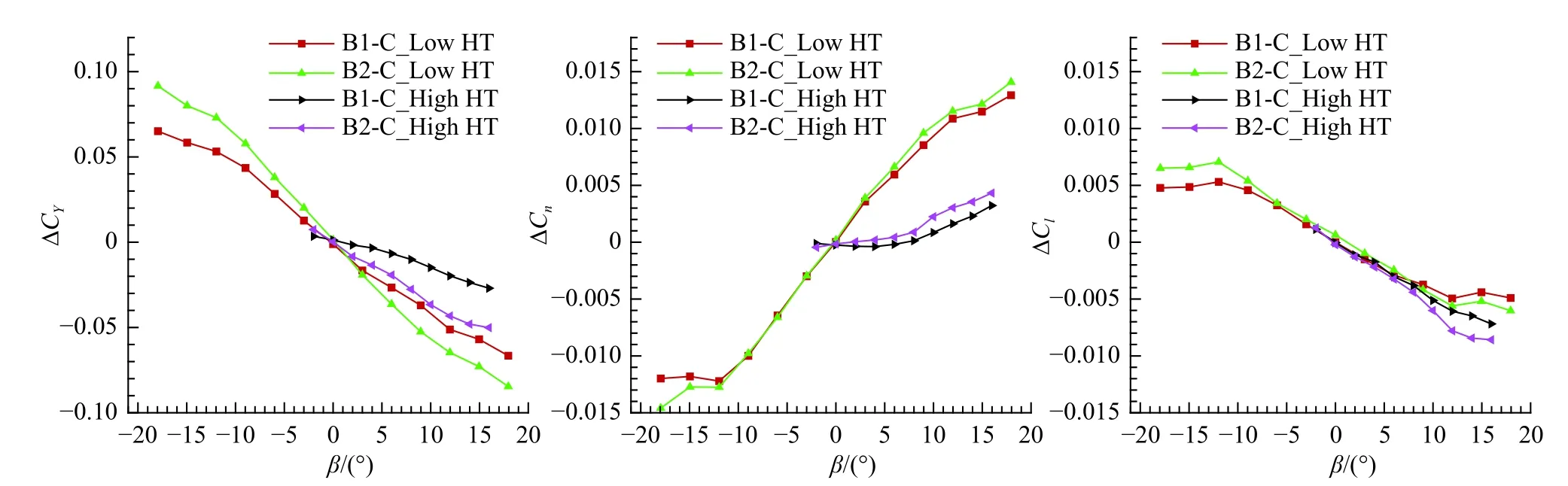
圖7 懸臂支撐機(jī)構(gòu)腹撐干擾量曲線(橫航向)Fig.7 Aerodynamic interference of the cantilever support (lateral)
由圖6 和圖7 可見(jiàn),相比方法一,方法二獲得的升力系數(shù)干擾量偏大(低平尾布局偏大約0.035,高平尾布局偏大約0.052),俯仰力矩系數(shù)干擾量偏小(低平尾布局偏小約0.058,高平尾布局偏小約0.145);橫向力、偏航力矩、滾轉(zhuǎn)力矩系數(shù)干擾量對(duì)側(cè)滑角的導(dǎo)數(shù)絕對(duì)值均有所偏大。
上述結(jié)果是由于方法一和方法二獲得的支撐干擾量缺項(xiàng)(即懸臂干擾量)不同造成的,可見(jiàn),8 m×6 m低速風(fēng)洞懸臂支撐機(jī)構(gòu)的遠(yuǎn)場(chǎng)懸臂干擾是不能簡(jiǎn)單忽略的,有必要進(jìn)行研究和修正。
為對(duì)懸臂干擾特性進(jìn)行定量分析,本文在8 m ×6 m 低速風(fēng)洞分別采用流場(chǎng)測(cè)量試驗(yàn)和典型模型測(cè)力試驗(yàn)的方法對(duì)懸臂干擾進(jìn)行研究。
2 懸臂干擾流場(chǎng)測(cè)量試驗(yàn)
2.1 流場(chǎng)測(cè)量試驗(yàn)內(nèi)容與方法
懸臂干擾流場(chǎng)測(cè)量試驗(yàn)在8 m×6 m 低速風(fēng)洞無(wú)試驗(yàn)?zāi)P汀⒈A籼卮蠊ソ菣C(jī)構(gòu)遠(yuǎn)場(chǎng)懸臂和雙立柱條件下進(jìn)行,采用五孔探針測(cè)量系統(tǒng)對(duì)流場(chǎng)的氣流俯仰角和速壓進(jìn)行測(cè)量。
五孔探針測(cè)量系統(tǒng)包含五孔探針測(cè)量耙、測(cè)壓系統(tǒng)和移測(cè)架系統(tǒng)。五孔探針測(cè)量耙上安裝11 根五孔探針(如圖8 所示),探針為半圓球頭直圓柱桿,長(zhǎng)300 mm,直徑8 mm,靜壓孔距離探頭頂端36 mm;相鄰探針間距為100 mm,測(cè)量耙水平安裝于移測(cè)架上(即z向測(cè)量范圍為±500 mm),11 根探針從左至右(逆氣流方向看)依次編號(hào)為1~11,通過(guò)探針上的標(biāo)準(zhǔn)刻線對(duì)齊測(cè)量耙的水平刻線確保每根五孔探針均無(wú)滾轉(zhuǎn)安裝角。探針測(cè)量的氣流俯仰角αq計(jì)算公式為:
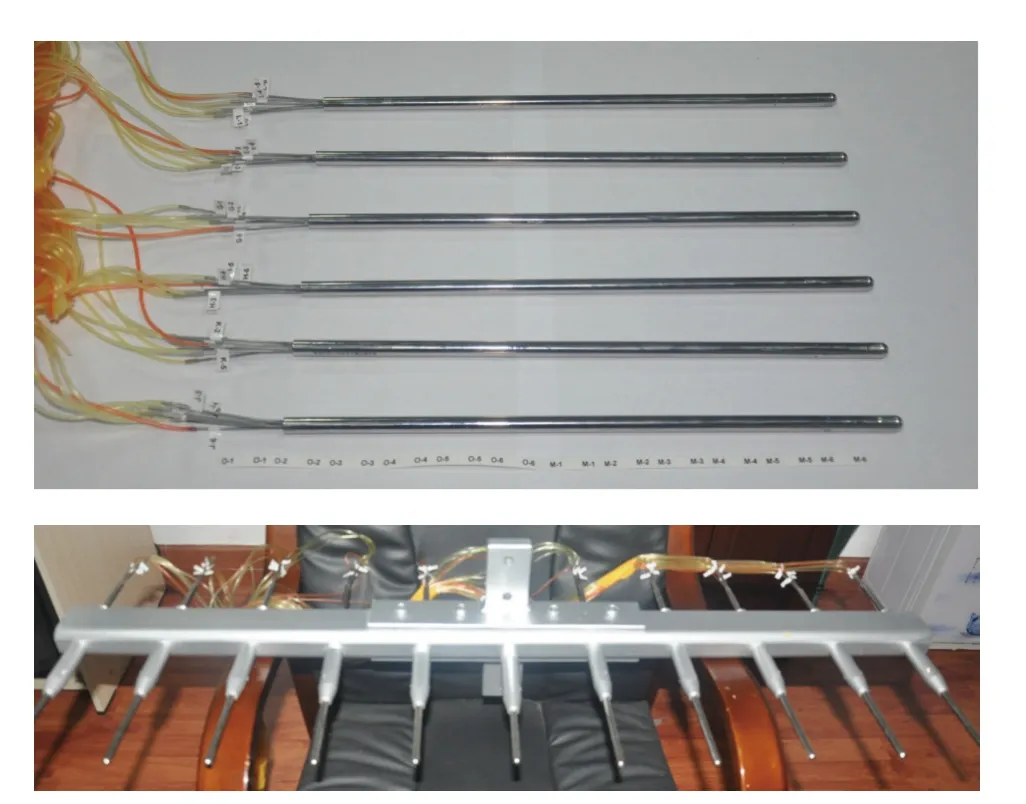
圖8 五孔探針及測(cè)量耙Fig.8 Five-hole probe and measuring rake
其中,Cpα=(p下-p上)/(p總-p靜),p上、p下、p總、p靜分別表示五孔探針的上孔、下孔、總壓孔和靜壓孔測(cè)得的壓力值;kα、bα分別表示對(duì)五孔探針測(cè)量俯仰角標(biāo)定的斜率和截距。
移測(cè)架系統(tǒng)通過(guò)電機(jī)驅(qū)動(dòng)可沿風(fēng)洞中心軸線移動(dòng),測(cè)壓系統(tǒng)采用DSM3400 電子掃描閥壓力測(cè)量系統(tǒng)和1 個(gè)量程為5 000 Pa(20 inch H2O)的掃描閥模塊,系統(tǒng)測(cè)量精度為±0.12%FS。
試驗(yàn)風(fēng)速為70 m/s,根據(jù)8 m×6 m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)典型支撐位置(如圖9 所示)并考慮一定普遍性,試驗(yàn)測(cè)量了5 個(gè)不同的五孔探針測(cè)量耙軸向位置(x原點(diǎn)位于風(fēng)洞中心,向后為正)下的流場(chǎng):x1=-1 000 mm(機(jī)翼典型軸向位置),x2=-500 mm,x3=0 mm,x4=500 mm,x5=1 000 mm(平尾典型軸向位置)。
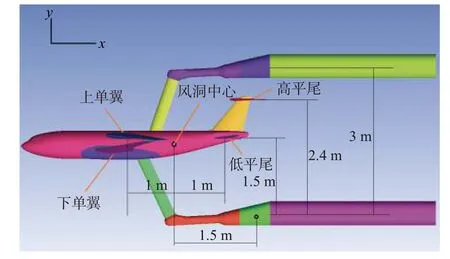
圖9 8m×6m 低速風(fēng)洞懸臂支撐機(jī)構(gòu)典型支撐位置Fig.9 Typical support positions of the cantilever support device
在每個(gè)軸向位置,測(cè)量了5 個(gè)不同懸臂高度下的流場(chǎng)(y原點(diǎn)位于風(fēng)洞中心,向上為正,由于懸臂距離測(cè)量耙過(guò)近導(dǎo)致干擾嚴(yán)重,x5未測(cè)量懸臂y3高度下的流場(chǎng)):y1=-2 350 mm(斜腹撐高平尾及較大迎角機(jī)翼典型高度),y2=-1 200 mm(斜腹撐機(jī)翼及低平尾典型高度),y3=0 mm,y4=900 mm(斜背撐較大迎角機(jī)翼典型高度),y5=1 800 mm(斜背撐機(jī)翼及低平尾典型高度)。
對(duì)于斜腹撐,模型迎角逐漸增大時(shí),模型x向位置逐漸增大(向后移動(dòng)),懸臂y向位置逐漸減小(向下移動(dòng));對(duì)于斜背撐,模型迎角逐漸增大時(shí),模型x向位置逐漸減小(向前移動(dòng)),懸臂y向位置逐漸減小(向下移動(dòng))。
2.2 流場(chǎng)測(cè)量試驗(yàn)結(jié)果與分析
圖10 和圖11 分別給出了典型軸向位置不同高度懸臂對(duì)流場(chǎng)氣流俯仰角和速壓影響曲線(未進(jìn)行光順,但去除了明顯跳點(diǎn))。
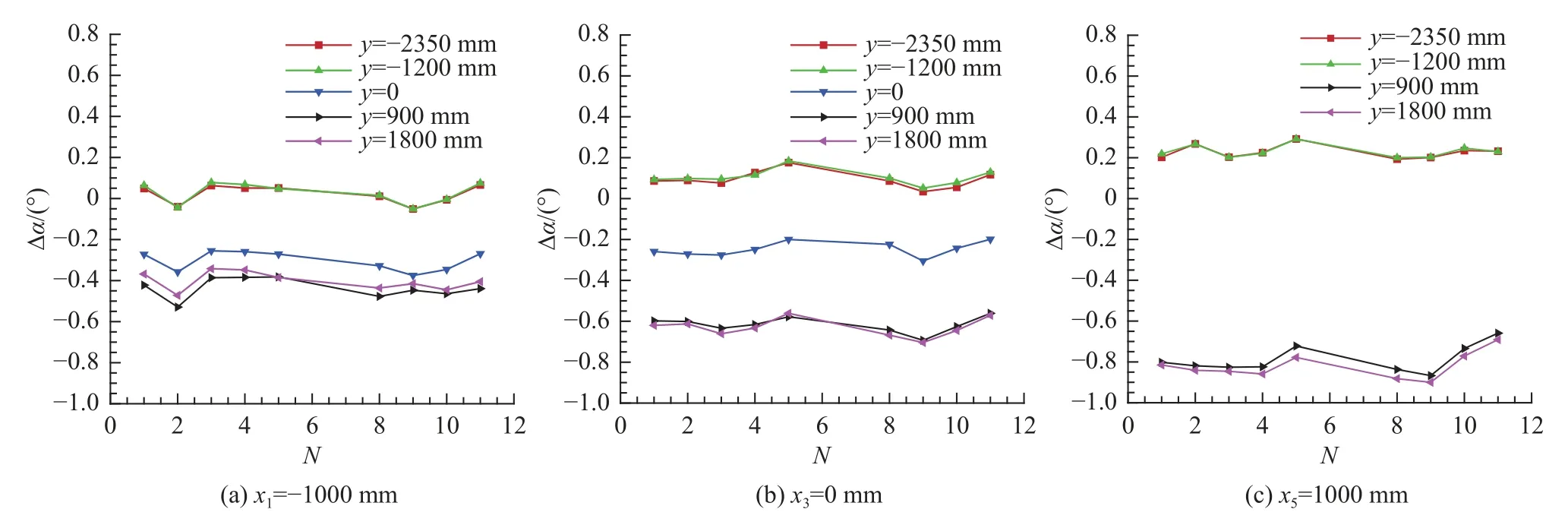
圖10 懸臂對(duì)氣流俯仰角影響曲線Fig.10 Effects of the cantilever support on the flow pitching angle
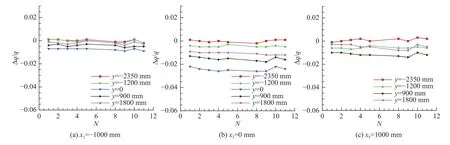
圖11 懸臂對(duì)速壓影響曲線Fig.11 Effects of the cantilever support on the dynamic pressure
由圖10 可見(jiàn),懸臂高度對(duì)風(fēng)洞氣流俯仰角存在一定影響,當(dāng)懸臂由下向上移動(dòng)(y由負(fù)值逐漸增大至正值)時(shí),風(fēng)洞中心軸線氣流俯仰角由正值逐漸變?yōu)樨?fù)值,懸臂位于風(fēng)洞中心軸線上方時(shí)的氣流俯仰角(絕對(duì)值)大于懸臂位于風(fēng)洞中心軸線下方時(shí)的值,即背撐懸臂對(duì)模型區(qū)流場(chǎng)的影響比腹撐懸臂更為嚴(yán)重。
由圖11 可見(jiàn),懸臂高度對(duì)風(fēng)洞速壓也存在一定影響,懸臂位于風(fēng)洞中心軸線時(shí)的速壓損失較為明顯,懸臂位于風(fēng)洞中心軸線上方時(shí)的速壓損失大多大于懸臂位于風(fēng)洞中心軸線下方時(shí)的速壓損失,同樣表明背撐懸臂對(duì)模型區(qū)流場(chǎng)的影響明顯比腹撐懸臂更為嚴(yán)重。
為便于分析,將上述11 根探針測(cè)量的流場(chǎng)氣流俯仰角和速壓增量取平均值,具體量值見(jiàn)表1 和表2。
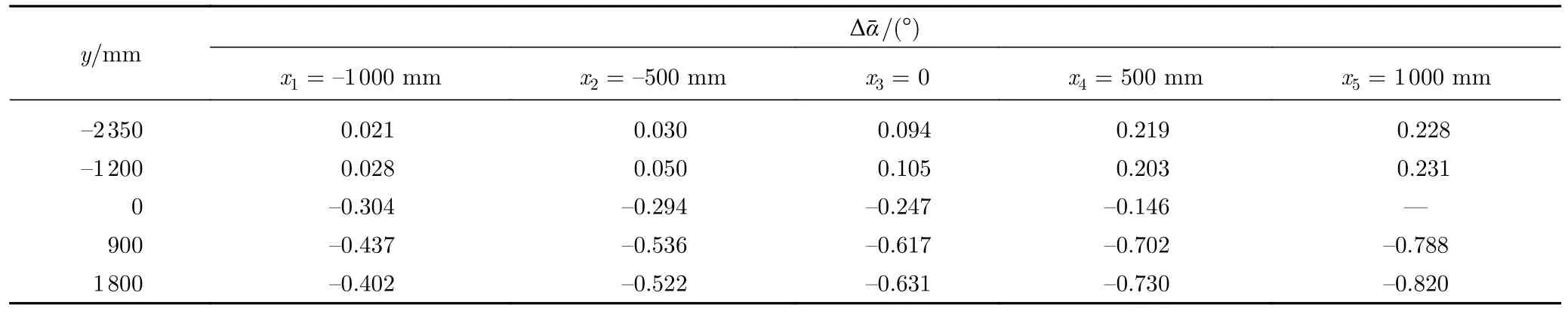
表1 懸臂對(duì)氣流俯仰角影響量Table 1 Effects of cantilever support on the flow pitching angle

表2 懸臂對(duì)速壓影響量Table 2 Effects of cantilever support on the dynamic pressure
由圖表可見(jiàn),當(dāng)懸臂位于風(fēng)洞中心軸線上方或下方時(shí),風(fēng)洞中心軸線氣流俯仰角的絕對(duì)值均隨x增大(靠近懸臂)呈增大趨勢(shì),且懸臂位于風(fēng)洞中心軸線上方時(shí)的氣流俯仰角的絕對(duì)值明顯大于下方時(shí)的值;速壓損失隨x增大呈先增大后減小趨勢(shì),且懸臂位于風(fēng)洞中心軸線上方時(shí)的速壓損失大多大于下方時(shí)的速壓損失;當(dāng)懸臂正處于風(fēng)洞中心軸線時(shí),風(fēng)洞中心軸線氣流俯仰角為負(fù)值,且隨x增大(靠近懸臂)呈絕對(duì)值減小趨勢(shì),速壓損失隨x增大急劇增大。造成懸臂位于風(fēng)洞中心軸線上方和下方明顯“不對(duì)稱”的原因應(yīng)當(dāng)是“懸臂”外形的“上下不對(duì)稱”(由圖9可以看出,緊鄰攻角頭后部的懸臂上方存在明顯“斜坡”,而下方較為平坦,并且實(shí)際懸臂的上下結(jié)構(gòu)特點(diǎn)存在差異,從而對(duì)前方流場(chǎng)形成“不對(duì)稱”影響)。
3 懸臂干擾模型測(cè)力試驗(yàn)
3.1 模型測(cè)力試驗(yàn)內(nèi)容與方法
懸臂干擾模型測(cè)力試驗(yàn)在“背撐+假腹撐”(圖4 中的B1 狀態(tài))基礎(chǔ)上進(jìn)行,腹撐懸臂干擾量通過(guò)“有懸臂”狀態(tài)和“無(wú)懸臂”狀態(tài)(如圖12 所示)氣動(dòng)力差量獲得:

圖12 CHN-T1 標(biāo)模懸臂干擾測(cè)力試驗(yàn)Fig.12 Cantilever interference test of CHN-T1 standard model
懸臂干擾典型模型測(cè)力試驗(yàn)中的腹撐假懸臂按照腹撐真懸臂尺寸設(shè)計(jì)并對(duì)其進(jìn)行一定簡(jiǎn)化后加工而成。腹撐假懸臂通過(guò)三角架固定連接于背撐真懸臂,三角架高度按照模型迎角為0°時(shí)的腹撐懸臂位置設(shè)計(jì)加工(隨模型迎角變化,腹撐假懸臂高度存在一定失真:迎角15°時(shí)的高度誤差為3.5%,約105 mm,由表1 可知,該高度誤差影響可忽略)。相比圖4 中的B1 狀態(tài),試驗(yàn)中的假近場(chǎng)支架不含假攻角頭,試驗(yàn)中,由于假懸臂與假近場(chǎng)支架存在相對(duì)運(yùn)動(dòng),通過(guò)連接于假懸臂且可在一定范圍內(nèi)活動(dòng)的假攻角頭(圖12 中未展示)進(jìn)行過(guò)渡。
試驗(yàn)風(fēng)速為70 m/s,分別對(duì)CHN-T1 低平尾布局標(biāo)模進(jìn)行了縱向和橫航向懸臂干擾試驗(yàn),對(duì)某高平尾布局模型進(jìn)行了縱向懸臂干擾試驗(yàn)。
3.2 模型測(cè)力試驗(yàn)結(jié)果與分析
圖13 和圖14 分別給出了縱向和橫航向腹撐懸臂干擾量與近場(chǎng)干擾量對(duì)比曲線。其中,“B1-C”表示方法一獲得的支撐干擾量(即為腹撐近場(chǎng)干擾量),“Low Beam”表示懸臂干擾試驗(yàn)獲得的腹撐懸臂干擾量;“Low HT”和“High HT”分別表示低平尾和高平尾布局模型。
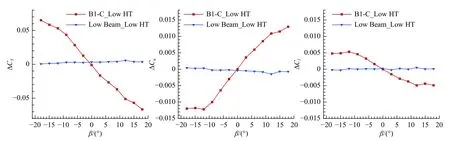
圖14 懸臂支撐機(jī)構(gòu)腹撐懸臂干擾量曲線(橫航向)Fig.14 Aerodynamic interference of the cantilever support (lateral)
由圖13 可見(jiàn),縱向腹撐懸臂干擾量與近場(chǎng)干擾量相當(dāng);由圖14 可見(jiàn),橫航向腹撐懸臂干擾量比近場(chǎng)干擾量小1 個(gè)量級(jí),基本可以忽略。
4 懸臂干擾修正方法建立與分析
4.1 懸臂干擾修正方法建立
根據(jù)運(yùn)輸類飛機(jī)模型氣動(dòng)特性和懸臂對(duì)其干擾特點(diǎn),忽略懸臂對(duì)模型區(qū)速壓的影響,同時(shí)簡(jiǎn)化或忽略部分小量,依據(jù)流場(chǎng)測(cè)量獲得的懸臂對(duì)模型各部件所在位置氣流偏角的影響,可建立運(yùn)輸機(jī)類飛機(jī)模型試驗(yàn)懸臂干擾修正方法如下:
4.2 懸臂干擾修正方法分析
基于前述懸臂干擾誤差分析、懸臂干擾流場(chǎng)測(cè)量以及懸臂干擾典型模型測(cè)力試驗(yàn)結(jié)果,對(duì)縱向懸臂干擾修正方法進(jìn)行分析。
根據(jù)圖9 所示,對(duì)于典型機(jī)翼所在位置,可近似取x=-1 000 mm,對(duì)應(yīng)懸臂高度為y=-1 200 mm(腹撐)、y=1 800 mm(背撐);對(duì)于典型低平尾所在位置,可近似取x=1 000 mm,對(duì)應(yīng)懸臂高度為y=-1 200 mm(腹撐)、y=1 800 mm(背撐),對(duì)于典型高平尾所在位置,近似取x=1 000 mm,對(duì)應(yīng)懸臂高度為y=-2 350 mm(腹撐)。這些位置速壓損失系數(shù)在0.006 以下,可忽略其影響。
依據(jù)表1 給出的流場(chǎng)測(cè)量結(jié)果,按典型機(jī)翼和平尾處腹撐與背撐懸臂高度下的氣流俯仰角差量可估算腹撐懸臂與背撐懸臂升力系數(shù)干擾差量,按典型低平尾處腹撐與背撐懸臂高度下的氣流俯仰角差量可估算腹撐懸臂與背撐懸臂俯仰力矩系數(shù)干擾差量,估算過(guò)程及結(jié)果詳見(jiàn)表3,表4 給出了升力系數(shù)和俯仰力矩系數(shù)干擾差量流場(chǎng)測(cè)量估算結(jié)果與圖6 給出的懸臂干擾試驗(yàn)結(jié)果對(duì)比。
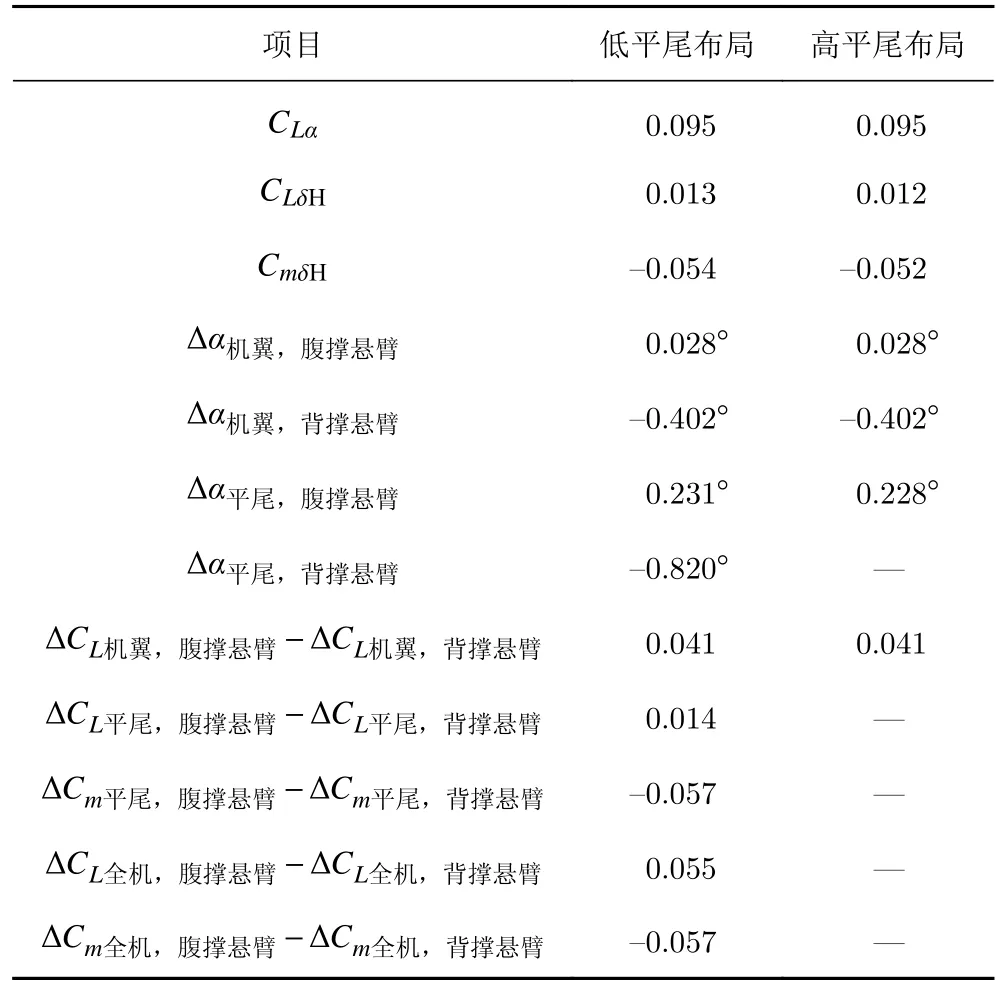
表3 腹撐與背撐懸臂氣動(dòng)干擾差量估算結(jié)果Table 3 Difference of aerodynamic interferences between ventral and dorsal cantilever supports
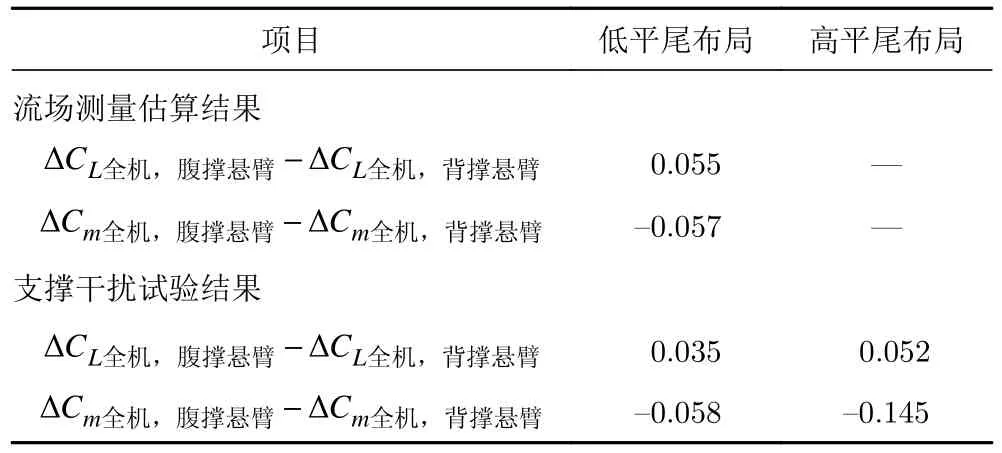
表4 腹撐與背撐懸臂氣動(dòng)干擾差量結(jié)果對(duì)比(α=0°)Table 4 Comparison of aerodynamic interference between ventral and dorsal cantilever supports (α=0°)
由表4 可見(jiàn),對(duì)低平尾布局,腹撐與背撐懸臂俯仰力矩系數(shù)干擾差量流場(chǎng)測(cè)量估算結(jié)果和支撐干擾試驗(yàn)結(jié)果吻合較好,升力系數(shù)干擾差量流場(chǎng)測(cè)量估算結(jié)果量值偏大;對(duì)高平尾布局,由于測(cè)量位置所限,無(wú)法采用流場(chǎng)測(cè)量結(jié)果進(jìn)行準(zhǔn)確估算,但趨勢(shì)與低平尾布局一致。分析認(rèn)為,流場(chǎng)測(cè)量估算的升力系數(shù)干擾差量結(jié)果偏大的原因很可能是機(jī)翼所在位置的實(shí)際氣流俯仰角小于表3 使用的氣流俯仰角:本文氣流俯仰角測(cè)量范圍是在z向(展向)±500 mm,而實(shí)際機(jī)翼展向跨度約為±2 500 mm,該范圍內(nèi)的實(shí)際氣流俯仰角小于測(cè)量范圍內(nèi)的俯仰角是易于理解的。
依據(jù)表1 給出的流場(chǎng)測(cè)量結(jié)果,按典型機(jī)翼和平尾處腹撐懸臂高度下的氣流俯仰角可估算腹撐懸臂升力系數(shù)干擾量,按典型低平尾和高平尾處腹撐懸臂高度下的氣流俯仰角可分別估算腹撐懸臂俯仰力矩系數(shù)干擾量,估算過(guò)程及結(jié)果詳見(jiàn)表5,表6 給出了流場(chǎng)測(cè)量估算結(jié)果與懸臂干擾試驗(yàn)結(jié)果(取圖13 中迎角范圍-4°~6°的平均值)對(duì)比。
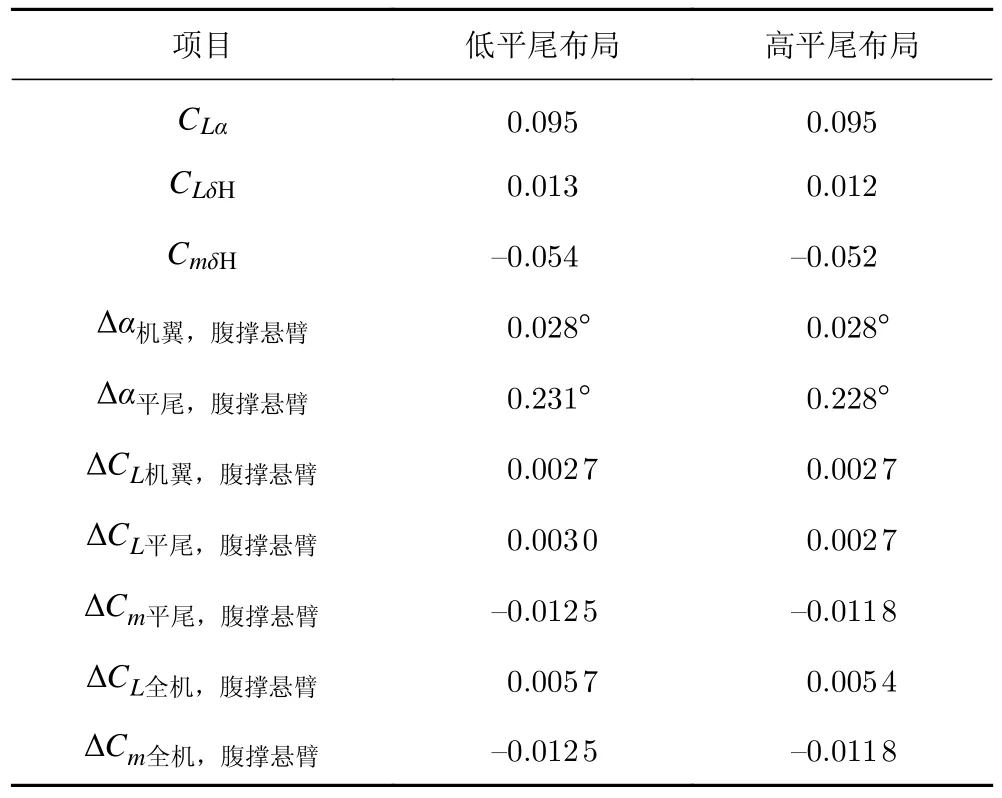
表5 腹撐懸臂氣動(dòng)干擾量估算結(jié)果Table 5 Aerodynamic interference of the ventral cantilever support
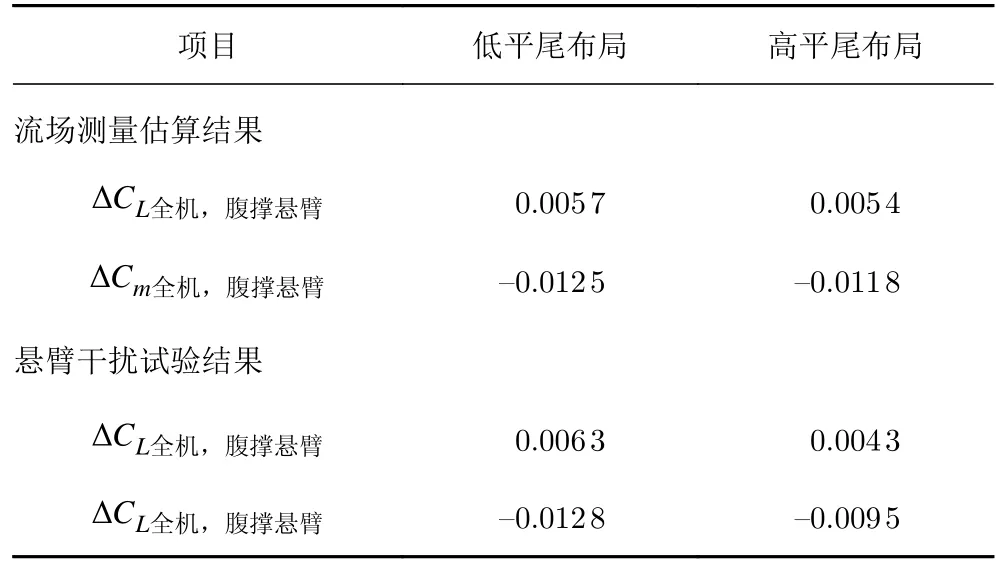
表6 腹撐懸臂氣動(dòng)干擾量結(jié)果對(duì)比Table 6 Comparison of aerodynamic interference of the ventral cantilever support obtained by numerical simulations and experiments
由表6 可見(jiàn),低平尾布局和高平尾布局的腹撐懸臂干擾量流場(chǎng)測(cè)量估算結(jié)果和懸臂干擾試驗(yàn)結(jié)果吻合較好。可見(jiàn),本文建立的懸臂干擾基本修正方法是可行的,能夠用于運(yùn)輸機(jī)類飛機(jī)模型試驗(yàn)的遠(yuǎn)場(chǎng)懸臂干擾修正。此外,由表4 和表6 結(jié)果對(duì)比可以看出,縱向腹撐懸臂干擾量明顯小于背撐懸臂干擾量,即在不考慮遠(yuǎn)場(chǎng)干擾條件下,對(duì)運(yùn)輸類飛機(jī)布局而言,方法一(采用“背撐+假腹撐”模擬B 狀態(tài))作為常規(guī)支撐干擾試驗(yàn)方法,獲得的支撐干擾量更為可靠。
5 結(jié)束語(yǔ)
本文在8 m×6 m 低速風(fēng)洞采用流場(chǎng)測(cè)量試驗(yàn)和典型模型測(cè)力試驗(yàn)獲得了懸臂支撐機(jī)構(gòu)遠(yuǎn)場(chǎng)懸臂干擾特性數(shù)據(jù)并建立了基本修正方法,研究得到:
1)懸臂由下向上移動(dòng)時(shí),風(fēng)洞中心軸線氣流俯仰角由正值逐漸變?yōu)樨?fù)值,背撐懸臂對(duì)模型區(qū)流場(chǎng)的影響比腹撐懸臂更為嚴(yán)重。
2)當(dāng)懸臂位于風(fēng)洞中心軸線上方或下方時(shí),風(fēng)洞中心軸線氣流俯仰角的絕對(duì)值均隨x增大(靠近懸臂)呈增大趨勢(shì),速壓損失隨x增大呈先增大后減小趨勢(shì);當(dāng)懸臂正處于風(fēng)洞中心軸線時(shí),風(fēng)洞中心軸線氣流俯仰角為負(fù)值且隨x增大(靠近懸臂)呈絕對(duì)值減小趨勢(shì),速壓損失隨x增大急劇增大。
3)縱向腹撐懸臂干擾量明顯小于背撐懸臂干擾量,橫航向腹撐懸臂干擾量基本可以忽略。
4)在不考慮遠(yuǎn)場(chǎng)干擾條件下,對(duì)運(yùn)輸類飛機(jī)布局而言,采用“背撐+假腹撐”模擬B 狀態(tài)作為常規(guī)支撐干擾試驗(yàn)方法,獲得的支撐干擾量更為可靠。
通過(guò)以上研究表明本文建立的懸臂干擾基本修正方法是可行的,能夠用于運(yùn)輸機(jī)類飛機(jī)模型試驗(yàn)的遠(yuǎn)場(chǎng)懸臂干擾修正。結(jié)合本文獲得的懸臂干擾特性數(shù)據(jù),后續(xù)還將在此基礎(chǔ)上完善懸臂支撐機(jī)構(gòu)遠(yuǎn)場(chǎng)干擾通用修正方法,并提供數(shù)據(jù)支撐。
猜你喜歡
直升機(jī)技術(shù)(2021年4期)2022-01-12 13:18:12
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:30
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
大飛機(jī)(2018年1期)2018-05-14 15:59:08
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
