機器人在110 kV 變電站的應(yīng)用
2023-09-02 07:07:08王建綱
通信電源技術(shù) 2023年14期
王建綱
(山西太鋼集團嵐縣礦業(yè)公司,山西 呂梁 035200)
0 引 言
對于110 kV 變電站智能巡檢中應(yīng)用的機器人,具體研究中,首先需要充分了解其對地理信息系統(tǒng)(Geographic Information System,GIS)、變壓器、高壓開關(guān)柜等電器設(shè)備巡檢工作中的主要應(yīng)用優(yōu)勢,然后再結(jié)合當(dāng)前110 kV 變電站的智能巡檢工作需求,對其硬件組成和軟件功能進(jìn)行分析。
1 110 kV 變電站電氣設(shè)備巡檢中的機器人應(yīng)用優(yōu)勢
就目前來看,智能機器人在110 kV 變電站電氣設(shè)備巡檢中的主要應(yīng)用優(yōu)勢包括以下幾點:(1)通過各類先進(jìn)檢測技術(shù)與設(shè)備的應(yīng)用,可讓獲取到的檢測數(shù)據(jù)更加精準(zhǔn),以此來提升變電站巡檢質(zhì)量;(2)可替代傳統(tǒng)人工進(jìn)行各類的常規(guī)巡檢工作,從而降低巡檢工作人員的作業(yè)強度,實現(xiàn)人力資源及其成本的合理節(jié)約;(3)可在室內(nèi)出現(xiàn)異常情況時完成一些應(yīng)急動作,如控制開關(guān)柜以及滅火等,以此來保障110 kV 變電站電氣設(shè)備的安全性;(4)可實現(xiàn)有毒氣體、溫度等環(huán)境條件的全面、準(zhǔn)確監(jiān)測,并具備交互對講和指揮功能,從而在110 kV 變電站應(yīng)急救援等工作中發(fā)揮出更好的優(yōu)勢;(5)可靈活實現(xiàn)轉(zhuǎn)彎、窄小空間避障等多項操作,并替代人工完成各項危險操作,從而進(jìn)一步提升變電站巡檢工作人員的安全性[1]。憑借著這些優(yōu)勢,智能巡檢機器人在當(dāng)今的110 kV 變電站電氣設(shè)備巡檢中得到了越來越廣泛的應(yīng)用。而此類機器人的硬件組成及其軟件功能應(yīng)用也成了當(dāng)今電力工程領(lǐng)域中的重點研究內(nèi)容。
2 110 kV 變電站電氣設(shè)備智能巡檢中機器人的硬件分析
本次所研究的是一種應(yīng)用在110 kV 變電站電氣設(shè)備智能巡檢中的機器人,其主體組成部分包括云臺、激光傳感器、紅外熱像儀、高清攝像頭、超聲傳感器、核心控制機箱、底盤模塊以及安全停障模塊等。以下是對其主要組成硬件進(jìn)行的分析。
2.1 運動方式、模塊和障礙物感應(yīng)裝置
此變電站戶外區(qū)域的機器人采用是地軌機器人,地軌巡檢機器人沿軌道行走,以激光雷達(dá)確保行走安全,搭載的高清可見光攝像機、紅外熱成像儀、環(huán)境及氣體傳感器對待巡檢對象進(jìn)行表計讀數(shù)抄錄、位置狀態(tài)識別、溫濕度檢測以及機器人所處位置的局部環(huán)境監(jiān)測。
此變電站戶內(nèi)區(qū)域的機器人為掛軌形式,其主要材料是歐標(biāo)直角4080 鋁型材,吊架部分使用膨脹螺栓固定在樓板上,吊架系統(tǒng)包括吊架頂板、吊架連接件、吊架底板。主控制室部分軌道離地約2.3 m,每隔2 m 左右安裝一個吊架;10 kV 配電室部分軌道離地2.6 m,每隔2.5 m 設(shè)置一個吊架,保證軌道及機器人運行的穩(wěn)定性。
具體巡檢時,該機器人行走模塊可實時監(jiān)測自身的低壓、高壓、斷路、短路、過流、過溫以及通信等情況,如果發(fā)現(xiàn)異常,則會控制機器人自動停工,并及時將錯誤狀態(tài)上報[2]。同時,該軌道式模塊的適應(yīng)性也很穩(wěn)定,在激光雷達(dá)導(dǎo)航的支持下,可在復(fù)雜地形、特殊環(huán)境下穩(wěn)定行走,檢測畫面準(zhǔn)確。
安全停障模塊是其障礙物感應(yīng)裝置,該模塊包括遠(yuǎn)距離和近距離2 級停障裝置,可在機器人巡檢中免受障礙物撞擊危害。其超聲停障警戒范圍為50 ~100 cm,當(dāng)檢測到這一范圍內(nèi)存在障礙物時,機器人便會減速,當(dāng)機器人和障礙物的距離不足50 cm時,機器人行走運動將立即停止。
2.2 可見光與紅外熱影像儀集成的一體化云臺
在該機器人中,云臺的主要作用是對巡檢時的紅外熱像儀與高清攝像頭拍攝角度加以控制,將全向型云臺用作云臺設(shè)備,可為其360°水平旋轉(zhuǎn)拍攝與90°垂直拍攝提供支持。每一次上電后,云臺都會通過全向旋轉(zhuǎn)的方式進(jìn)行一次自檢。該機器人云臺中的高清攝像頭像素為200 萬,光學(xué)變焦可達(dá)30 倍,以此來及時發(fā)現(xiàn)110 kV 變電站中存在的異常,盡最大限度避免產(chǎn)生嚴(yán)重的故障和事故。
2.3 無線通信設(shè)備和AP 無線網(wǎng)絡(luò)箱
將Rocket M2 設(shè)備用作該機器人中的無線通信設(shè)備,通過專利天線技術(shù)和模塊之間的完美組合,可在不需要外接天線的條件下實現(xiàn)30 km 的遠(yuǎn)距離通信,同時也將柵格天線的全部功能都集成在其中,以此來充分滿足機器人巡檢中的通信需求[3]。
將實際巡檢區(qū)域作為依據(jù),在變電站中進(jìn)行無線網(wǎng)絡(luò)架設(shè),其網(wǎng)絡(luò)覆蓋主要通過無線接入點(Access Point,AP)來實現(xiàn)。為確保機器人巡檢中高清視頻的流暢播放,可將一個無線AP 設(shè)置在110 kV 變電站,另一個無線AP 設(shè)置在客戶端,通過2 個無線AP 的連接來進(jìn)行高清巡檢視頻的實時獲取和播放,以此來實現(xiàn)110 kV 變電站智能巡檢中實際情況的實時掌握。
巡檢機器人通過滑觸線電力載波方式與后臺服務(wù)器實時通信控制。充分利用配電房的電力資源,基于現(xiàn)有滑觸電力線通過載波方式高速傳輸模擬或數(shù)字信號,無需另外架設(shè)網(wǎng)絡(luò)線路,實現(xiàn)了機器人與遠(yuǎn)程控制室的通信及數(shù)據(jù)遠(yuǎn)程傳輸?shù)裙δ埽ㄐ欧绞浇?jīng)濟且高效。巡檢機器人的主要通信方式如圖1 所示。

圖1 巡檢機器人主要通信方式
2.4 自主充電裝置和充電房
機器人的自主充電主要通過自主充電裝置來完成,該裝置主要由信號觸頭和正負(fù)極觸頭組成,充電成功后,裝置上的充電指示燈會呈綠色,充電電流會顯示在電流表上。同時,該裝置也支持自動充電和手動充電2 種模式的相互切換。在手動充電模式中,只需要讓機器人的正負(fù)極充電觸頭正確接觸到充電座上的正負(fù)充電觸頭,便可直接為機器人充電。
充電房的主要作用是存放機器人并為其充電,本次設(shè)計的機器人充電房尺寸是180 cm×180 cm×220 cm,其中設(shè)置了自主充電座、專用配電箱、自動卷簾門、手動充電器以及電燈等裝置。通過角鋼和優(yōu)質(zhì)槽鋼焊接出機械強度足夠高的基本骨架,通過鍍鋅板材料制作其外殼,從而使整個充電房具備良好的堅固性和抗腐蝕能力。
2.5 監(jiān)控平臺和微氣象站數(shù)據(jù)交互
在該機器人進(jìn)行110 kV 變電站電氣設(shè)備巡檢時,監(jiān)控平臺和微氣象站之間的數(shù)據(jù)交互主要通過網(wǎng)絡(luò)來實現(xiàn),從而使監(jiān)控平臺能夠?qū)ψ冸娬镜氖彝猸h(huán)境監(jiān)測數(shù)據(jù)做到實時獲取。本次設(shè)計中,監(jiān)控平臺和微氣象站之間的通信協(xié)議為傳輸控制協(xié)議/網(wǎng)絡(luò)協(xié)議(Transmission Control Protocol/Internet Protocol,TCP/IP)。具體巡檢中,需根據(jù)實際的環(huán)境情況來合理設(shè)置機器人輔助硬件,使其與檢測環(huán)境相適應(yīng)[4]。借助于監(jiān)控平臺,用戶可對110 kV 變電站室外的風(fēng)速、溫度、濕度以及降水等信息進(jìn)行實時查詢,以此來滿足實際的變電站巡檢需求。
2.6 其他附屬設(shè)備設(shè)置
除了以上幾種主要的硬件設(shè)備外,在該機器人的硬件中,還包括以下幾項其他附屬設(shè)備:(1)設(shè)置了2 個開關(guān)按鈕,一個是電源開關(guān),主要負(fù)責(zé)為機器人中的各個設(shè)備上電,另一個是急停開關(guān),主要負(fù)責(zé)機器人底盤停止運動操作的強制執(zhí)行;(2)將UF-R1021T 型耳神藍(lán)牙音響作為機器人音響,將厚實的橡膠包裹在其兩邊,以此來實現(xiàn)智能檢測中的語音播報;(3)將HD-18D 碟型拾音器設(shè)置在機器人上,負(fù)責(zé)硬盤錄像機、有源音箱以及錄音機等的直接驅(qū)動;(4)將遙控安卓手機作為遙控器,以此來進(jìn)行機器人巡檢操控。
3 110 kV 變電站電氣設(shè)備智能巡檢中機器人的軟件功能分析
在110 kV 變電站電氣設(shè)備智能巡檢機器人的實際應(yīng)用中,其主要的軟件功能包括實時監(jiān)控、巡檢計劃、遠(yuǎn)程遙控以及數(shù)據(jù)管理等。以下是對其主要軟件功能進(jìn)行的分析。
3.1 實時監(jiān)控
在機器人巡檢時,用戶可通過打開客戶端軟件,進(jìn)入模塊界面來實時查看其巡檢路線、當(dāng)前位置和即將巡檢的設(shè)備等,這些信息都將以紅外視頻或高清視頻的形式顯示在界面上。在該模塊的實現(xiàn)中,主要的支持功能包括電子地圖、可見光視頻、紅外視頻、微氣象信息、近期巡檢任務(wù)以及運行信息等。110 kV變電站智能巡檢中的機器人實時監(jiān)控模塊主要功能情況如表1 所示。
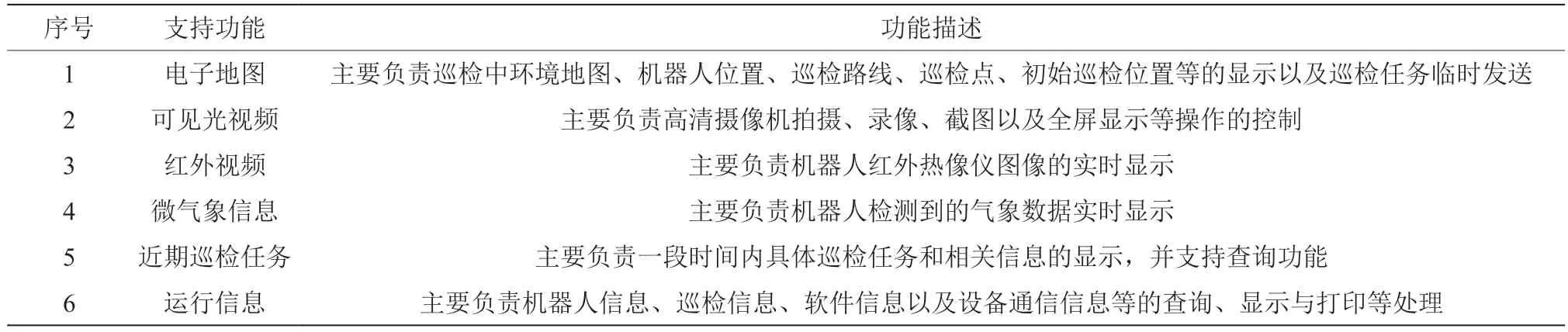
表1 110 kV 變電站智能巡檢中的機器人實時監(jiān)控模塊主要功能情況
3.2 巡檢計劃
在該巡檢機器人的巡檢計劃軟件模塊中,主要的功能包括以下2 個:(1)任務(wù)安排,通過一個日歷信息控件顯示日歷中每一天關(guān)于巡檢任務(wù)的信息,包括當(dāng)天110 kV 變電站巡檢任務(wù)的制定、執(zhí)行及其完成等信息,具體應(yīng)用中,可根據(jù)實際需求對機器人的重復(fù)巡檢計劃加以科學(xué)制定,包括每個月的巡檢頻次、巡檢日期以及每次巡檢時間等;(2)任務(wù)編輯,該軟件主要負(fù)責(zé)110 kV 變電站機器人巡檢任務(wù)的編輯與下發(fā)處理,具體應(yīng)用中,可按照實際需求對該功能界面任務(wù)樹里的一些設(shè)備進(jìn)行勾選,將其儲存成一個巡檢任務(wù),并將這個任務(wù)下發(fā)給機器人,以此來進(jìn)行機器人的巡檢控制。為便于用戶巡檢設(shè)備的勾選,該軟件還設(shè)置了變電站設(shè)備分類與查詢功能,借助于這一功能,可按照110 kV 變電站中不同的設(shè)備區(qū)域、不同的設(shè)備類型以及不同巡檢類型進(jìn)行設(shè)備查詢,或通過關(guān)鍵字搜索進(jìn)行設(shè)備查詢[5]。
3.3 遠(yuǎn)程遙控
操作者可在該軟件上按實際的巡檢任務(wù)需求將機器人遙控到指定的巡檢地點,對待檢測設(shè)備實施特巡,并進(jìn)行紅外和可見光圖像拍攝。該軟件模塊的主要支持控件包括以下幾種:(1)雷達(dá)控件,該控件和汽車倒車?yán)走_(dá)具有基本相同的功能,可實現(xiàn)機器人巡檢中激光信息的實時顯示,遙控其與周邊障礙物保持安全距離;(2)車體控件,該控件和汽車方向盤功能類似,點擊其中的不同區(qū)域,便可對機器人巡檢中的左轉(zhuǎn)、右轉(zhuǎn)、前進(jìn)以及后退進(jìn)行遙控;(3)云臺控件,該控件與車體控制操作方法類似,通過鍵盤鼠標(biāo)組合的方式,可對云臺進(jìn)行左轉(zhuǎn)、右轉(zhuǎn)、變倍、降低、抬高等運動進(jìn)行遙控;(4)模式切換控件,主要負(fù)責(zé)機器人巡檢中遙感遙控和按鈕遙控2 種模式的切換。
3.4 數(shù)據(jù)管理
在該巡檢機器人的軟件系統(tǒng)中,數(shù)據(jù)管理也是一個至關(guān)重要的軟件功能模塊。通過該模塊,可將110 kV 變電站機器人巡檢中獲取到的歷史數(shù)據(jù)進(jìn)行統(tǒng)計分析,再將最終獲得的結(jié)果以設(shè)備地圖、日歷、柱狀圖、列表等形式顯示在客戶端軟件界面上。在110 kV 變電站的智能巡檢工作中,機器人數(shù)據(jù)管理軟件主要可實現(xiàn)以下幾項功能:(1)缺陷控件可顯示出系統(tǒng)設(shè)備分析所獲得的異常結(jié)果,對于這些異常情況,可采用人工確認(rèn)的方式重新進(jìn)行修改;(2)歷史曲線控件可將某一設(shè)備巡檢中的所有歷史數(shù)據(jù)繪制為一條曲線,通過這條曲線,便可明確該設(shè)備在某一段時間里的實際運行狀態(tài);(3)歷史數(shù)據(jù)界面上會顯示出同一設(shè)備不同歷史時段里的巡檢圖片,并對其差異性做出科學(xué)對比,以此來實現(xiàn)相應(yīng)設(shè)備異常及其發(fā)展趨勢的科學(xué)掌握。
4 結(jié) 論
要想使其硬件和軟件優(yōu)勢得以充分發(fā)揮,相關(guān)單位、研究者、技術(shù)人員就需要對其硬件組成及其軟件功能等進(jìn)行全面研究。明確硬件系統(tǒng)中各個組成部分的主要功能及其應(yīng)用方法,借助于各種軟件功能來進(jìn)行機器人巡檢作業(yè)的控制。通過這樣的方式,才可以進(jìn)一步提升巡檢機器人的應(yīng)用效果,提升其巡檢效率、質(zhì)量和安全性,以此來充分滿足當(dāng)今110 kV 變電站電氣設(shè)備的實際巡檢工作需求,為智能巡檢機器人的應(yīng)用和110 kV 變電站的發(fā)展奠定良好基礎(chǔ)。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子制作(2017年8期)2017-06-05 09:36:15
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45