基于數值模擬方法的導流片和蜂窩器對空泡水洞工作段流場的影響研究
2023-09-02 04:00:12任海奎杜云龍董國祥
上海船舶運輸科學研究所學報 2023年3期
關鍵詞:模型
任海奎, 劉 恒, 杜云龍, 董國祥
上海船舶運輸科學研究所有限公司 航運技術與安全國家重點實驗室, 上海 200135)
0 引 言
空泡水洞是研究水面和水下船艇、高速巡航體及推進系統的水動力性能所需的重要設備之一,可為推進器的性能評估、設計和優化等提供試驗數據[1-2]。空泡水洞主要由收縮段、工作段、擴散段、拐角段(4個)、拐角處導流片、蜂窩器、軸流泵和定子等分段或裝置組成。由于空泡水洞是非常復雜的循環系統,造價較高,國內擁有相關設施的科研機構較少;同時,受計算資源等因素的影響,以往針對空泡水洞整個系統開展的數值模擬研究[3]相對較少。
目前已有很多研究人員針對空泡水洞或風洞開展數值模擬和試驗研究。例如:吳宗成等[4]采用數值模擬方法對空泡水洞收縮段流場的收縮曲線進行了分析;李巖等[5]采用皮托管測速技術對大型空泡水洞的流場進行了測量;劉恒等[6]對空泡水洞工作段流體的流動品質進行了數值模擬;易小軍等[7]研究了風洞中風扇系統的風扇、整流罩和止旋片等3個部件對風扇段三維流場特性的影響;諶童等[8]研究了導流片的數量、分布方式和厚度對拐角出口流場的均勻性和能量損失的影響;叢成華等[9]采用數值模擬方法對風洞三通進行了優化。
本文采用計算流體力學(Computational Fluid Dynamics,CFD)技術對上海船舶運輸科學研究所有限公司(以下簡稱“上海船研所”)正在運營的空泡水洞的流場特性進行數值模擬,并將所得結果與試驗測試結果相對比,驗證該數值模擬方法的有效性。在此基礎上,分別對不含蜂窩器、不含蜂窩器和導流片的空泡水洞進行數值模擬,并對其流場特性及工作段流場的不均勻度和湍流度進行對比,分析導流片和蜂窩器對空泡水洞流場特性的影響,為大型空泡水洞的設計和優化提供參考。
1 控制方程及湍流模型
本文研究的是流動問題,基本控制方程包括連續方程和動量方程。
黏性不可壓縮流體的連續性方程(質量守恒方程)和動量方程分別為
(1)
(2)
式(1)和式(2)中:ρ為流體密度;P為靜壓力;τij為剪切應力;ρfi為i方向的重力體積力;ui和uj分別為i方向和j方向的瞬時速度。
由于在實際工程計算中對湍流的流動進行直接模擬的代價很高,因此采用雷諾平均化方法對控制方程進行處理,得到經過簡化的雷諾平均控制方程
(3)
(4)
為使式(3)和式(4)封閉,引入湍流模型SSTk-ω。該模型考慮了湍動剪切應力,能較為準確地模擬空泡水洞內的流場特性。
SSTk-ω模型中k和ω的輸運方程分別為
(5)
(6)
式(5)和式(6)中:Γk和Γω為k和ω的有效擴散率;Gk和Gω為湍流生成項;Yk和Yω為湍耗散項。
2 研究對象和區域網格劃分
2.1 研究對象
本文的研究對象為上海船研所正在運營的總長度為15 m的中型空泡水洞,其三維數值模型見圖1。

圖1 空泡水洞三維數值模型
空泡水洞工作段的縱向長度為2.6 m,橫截面為帶圓角的尺寸為0.6 m的正方形;導流片位于空泡水洞的4個轉角處,軸流泵位于空泡水洞底端,這樣布置有利于避免槳葉高速旋轉產生空泡;軸流泵前端布置有三葉前置定子。水流經過圖1左上方拐角之后先進入蜂窩器和收縮段,隨后進入工作段。圖2為軸流泵、三葉前置定子和蜂窩器三維模型。

圖2 軸流泵、三葉前置定子和蜂窩器三維模型
2.2 網格劃分及參數設置
黏性流場計算域網格的劃分和求解是在商業軟件STAR CCM+中完成的。計算域分為旋轉域和外部流域,為保證流動的連續性,設置一組交界面進行數據交換。外部流域網格采用切割體網格離散,在蜂窩器、導流片、三葉前置定子及軸系等區域進行加密處理;軸流泵所在旋轉域網格采用多面體網格,在導邊葉梢處進行加密處理。整個計算域的網格總數約為3 200萬個。圖3為空泡水洞筒壁、軸流泵和前置定子表面網格分布示意圖。
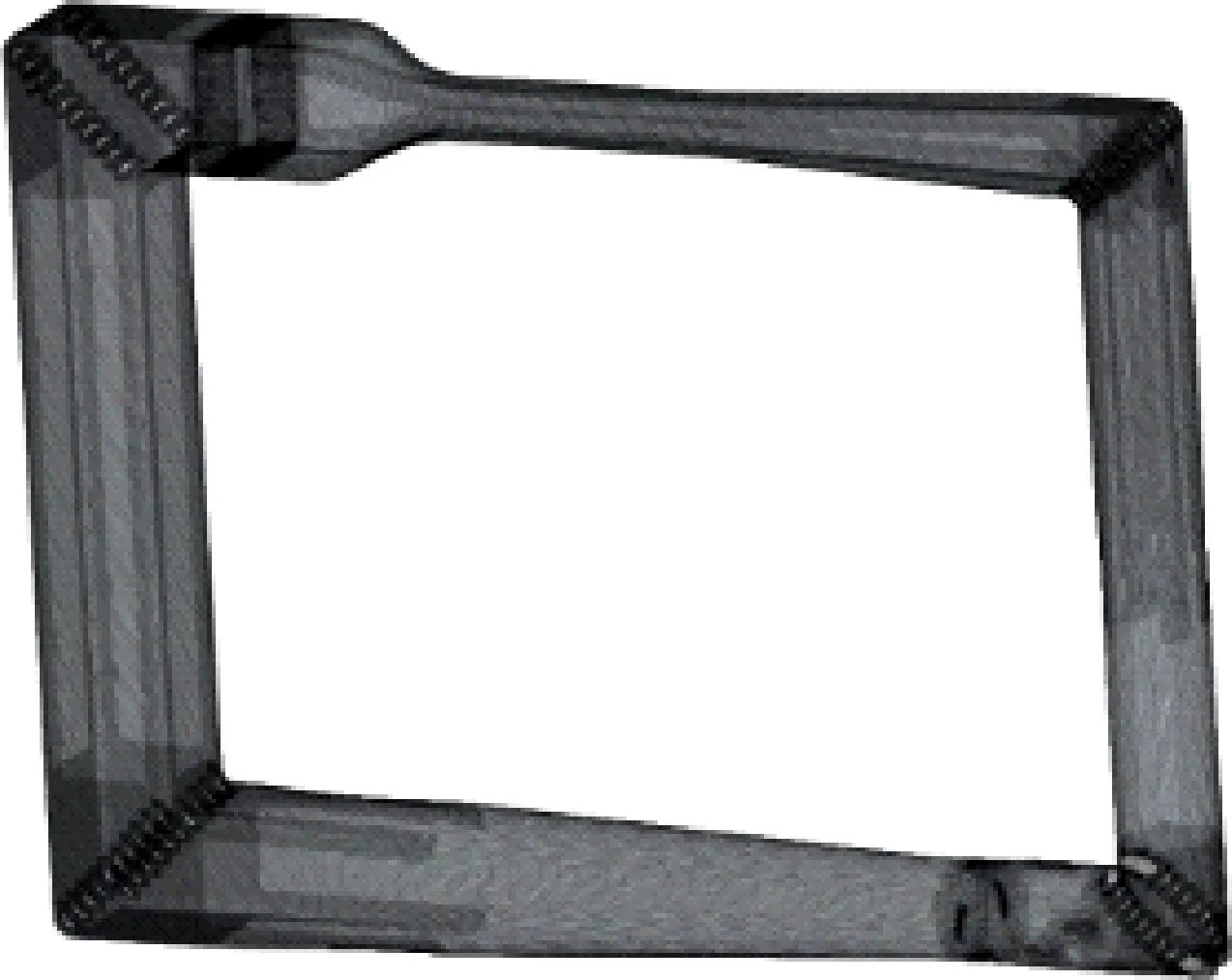
a) 空泡水洞筒壁
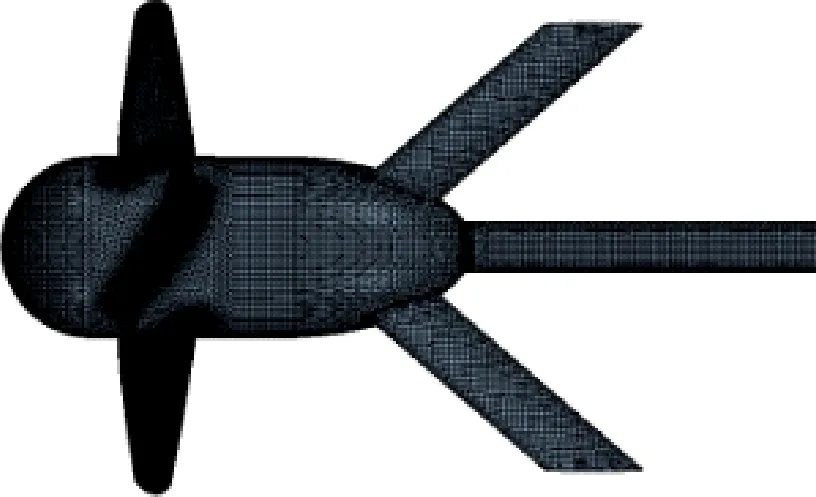
b) 軸流泵和前置定子圖3 空泡水洞筒壁、軸流泵和前置定子表面網格分布示意圖
3 試驗測試結果與數值計算結果對比
3.1 試驗測試
采用疏式畢托耙測量工作段不同位置截面的軸向流速場,畢托耙包含7個畢托管。這些畢托管與軸線之間的距離分別為R1=49 mm,R2=63 mm,R3=78 mm,R4=95 mm,R5=114 mm,R6=135 mm,R7=152 mm。調整軸流泵的轉速,使工作段進口處(定位為x=0 m)截面流體的平均流速約為4 m/s,畢托耙以10°為間隔旋轉,旋轉1周,共測量252個點。分別測量距離工作段入口0.5 m(x=0.5 m)和1.0 m(x=1.0 m)的2個截面流體的軸向速度,進而計算出x=0.5 m和x=1.0 m處截面流體的軸向速度的不均勻度和湍流度。
3.2 不均勻度和湍流度數值計算結果處理方法
1) 軸向速度的不均勻度(工作段來流方向)為
(7)
2) 垂向速度的不均勻度(空泡水洞高度方向)為
(8)
3) 橫向速度的不均勻度(空泡水洞寬度方向)為
(9)

第i個面單元的湍流度的表達式為
(10)
截面平均湍流度的表達式為
(11)
3.3 數值計算結果
由于畢托管與畢托耙中心之間的最大測量距離約為150 mm,為使數值計算工況與試驗測試工況保持一致,在數值模擬中同樣對工作段x=0.5 m和x=1.0 m(即距離工作段入口0.5 m和1.0 m)處尺寸為0.2 m×0.3 m的長方形區域流體的不均勻度和湍流度進行計算。圖4為該研究區域在工作段橫截面中的位置,其中最外側帶倒圓的正方形為空泡水洞工作段筒壁。

圖4 研究區域在工作段橫截面中的位置
根據3.2節所述數據處理方法對數值計算結果進行分析,結果見表1、圖5和圖6。由表1、圖5和圖6可知,數值計算結果與試驗測試結果的吻合性較好,證明采用該數值模擬方法對空泡水洞流場進行數值模擬是可行的。

表1 工作段截面軸向速度不均勻度和湍流度的試驗測試結果與數值計算結果對比

a) 數值計算結果
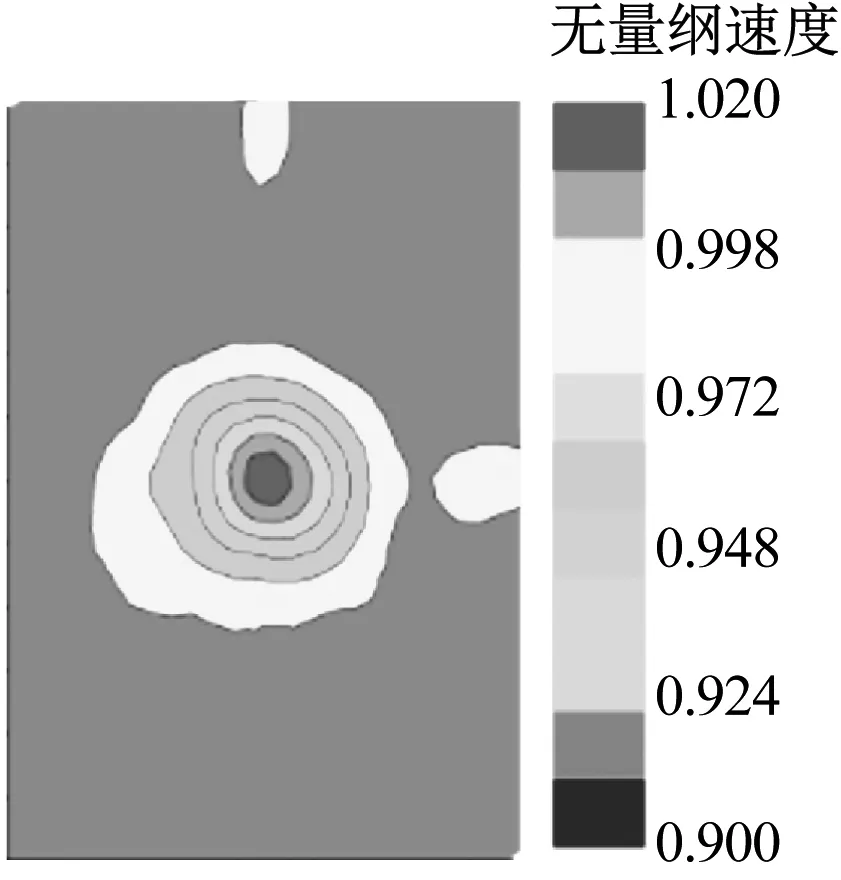
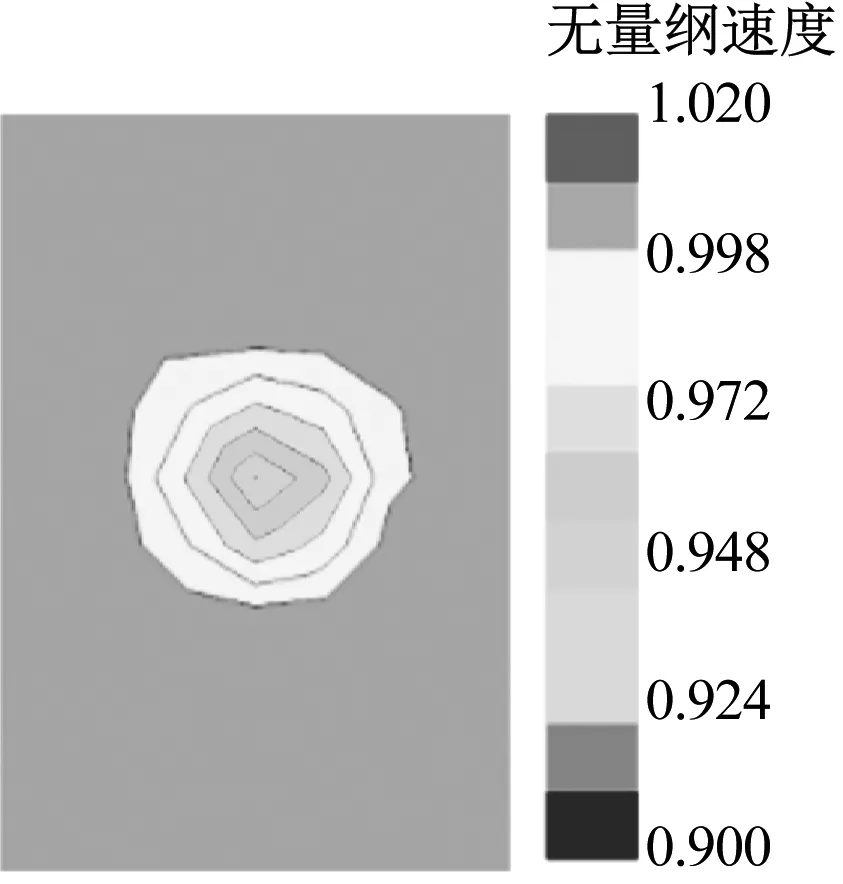
b) 試驗測試結果圖5 x=0.5 m試驗測試處截面軸向速度分布的數值計算結果和試驗測試結果
a) 數值計算結果

b) 試驗測試結果圖6 x=1.0 m處截面軸向速度的數值計算結果和試驗測試結果
4 蜂窩器和導流片對空泡水洞工作段流場特性的影響
為研究蜂窩器和導流片對空泡水洞工作段流場特性的影響,在對空泡水洞完整模型進行數值模擬的同時,分別對不含蜂窩器、不含蜂窩器和導流片的空泡水洞模型的流場特性進行數值模擬,分析空泡水洞工作段截面(x=0.5 m和x=1.0 m)流體的不均勻度和湍流度。為更深入地探索蜂窩器和導流片對空泡水洞工作段流場特性的影響,對蜂窩器前后截面與工作段截面流體的速度分布進行對比分析。圖7為完整的空泡水洞模型,以及不含蜂窩器、不含蜂窩器和導流片的空泡水洞模型。

a) 完整模型

b) 不含蜂窩器模型
c) 不含蜂窩器和導流片模型圖7 完整的空泡水洞模型,以及不含蜂窩器、不含蜂窩器和導流片的空泡水洞模型
4.1 數值計算結果
表2為空泡水洞工作段截面流場不均勻度和湍流度的數值計算結果。由表2可知:相比完整模型,不含蜂窩器模型工作段水流的平均速度要大一些,這是由于蜂窩器在起到整流作用的同時,有一定的阻塞作用;不含蜂窩器模型的軸向速度的不均勻度與完整模型比較接近,但其垂向速度和橫向速度的不均勻度相比完整模型顯著增大,導致其湍流度增大,這說明蜂窩器的主要作用是消除工作段水流的垂向速度和橫向速度;不含蜂窩器和導流片模型的平均水流速度相比另外2種模型出現較大的衰減,且該模型3個方向水流速度的不均勻度和湍流度均有很大幅度的增加,這說明若沒有導流片的導流作用,水流在通過拐角時流動不順暢,進而使進入收縮段和工作段的水流的速度下降。

表2 空泡水洞工作段截面流場不均勻度和湍流度的數值計算結果
4.2 局部截面速度和湍流度分布
為進一步分析蜂窩器和導流片對空泡水洞工作段流場特性的影響,分別對完整模型、不含蜂窩器模型、不含蜂窩器和導流片模型的中縱剖面的速度分布、工作段截面(以x=0.5 m截面為例)的速度和湍流度,以及蜂窩器前后截面的速度分布進行分析,結果見圖8~圖12。

a) 完整模型

b) 不含蜂窩器模型
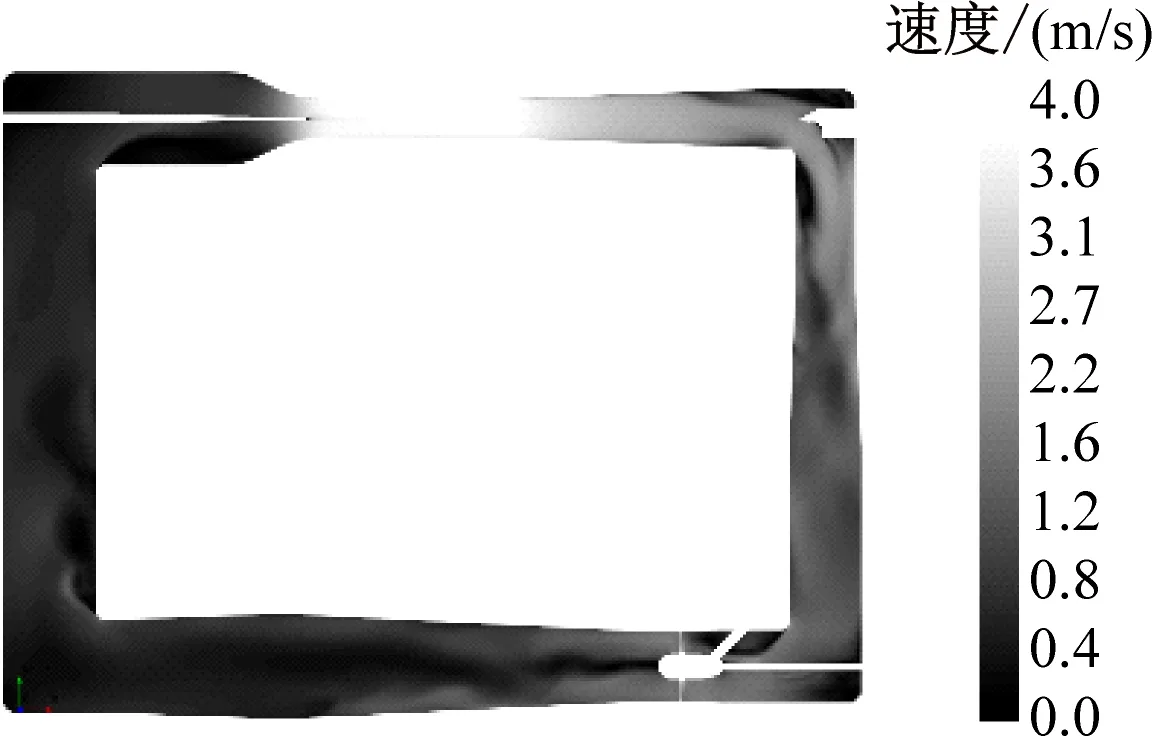
c) 不含蜂窩器和導流片模型圖8 完整模型、不含蜂窩器模型、不含蜂窩器和導流片模型的中縱剖面速度分布
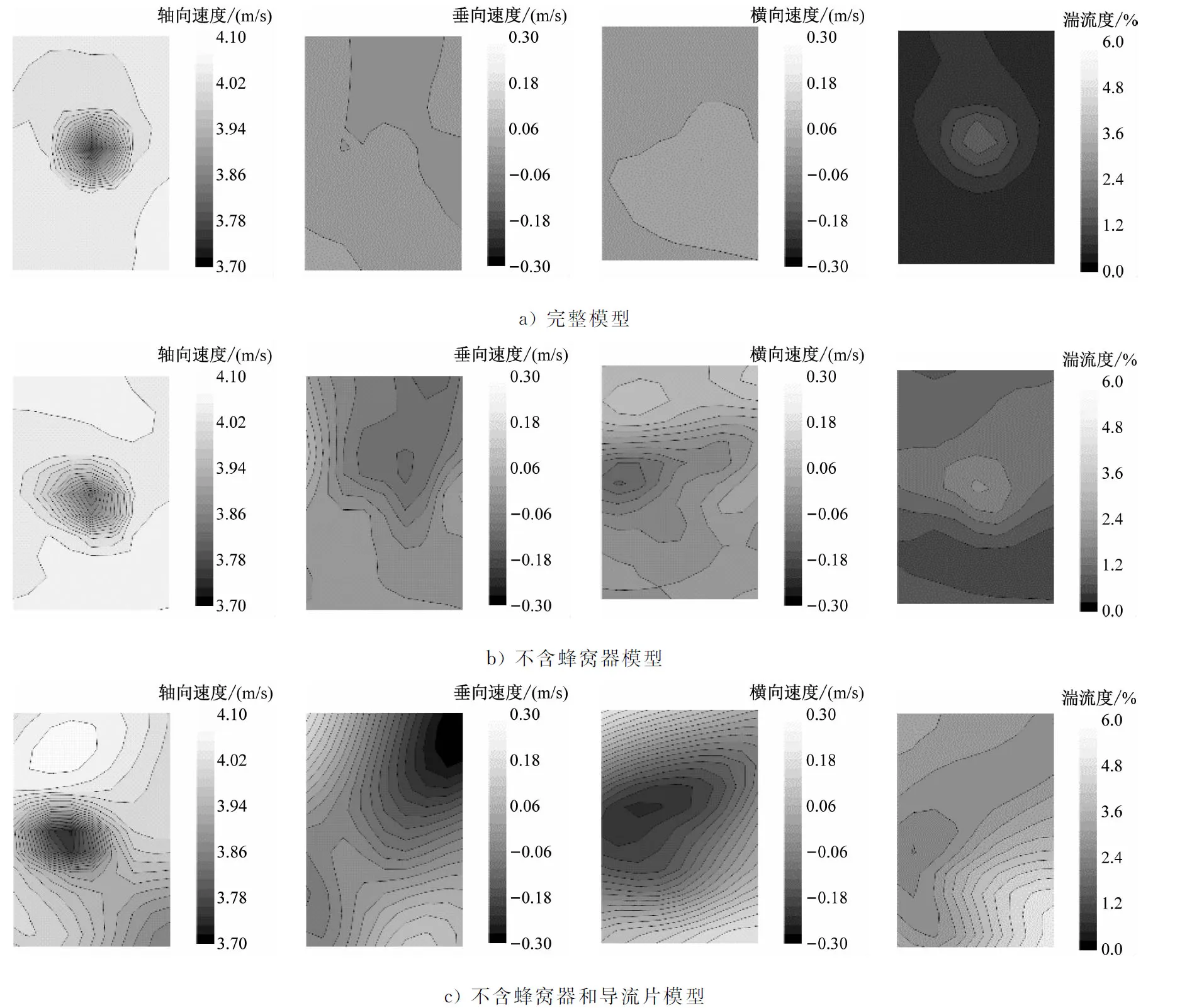
圖9 完整模型、不含蜂窩器模型、不含蜂窩器和導流片模型x=0.5 m處的速度和湍流度分布
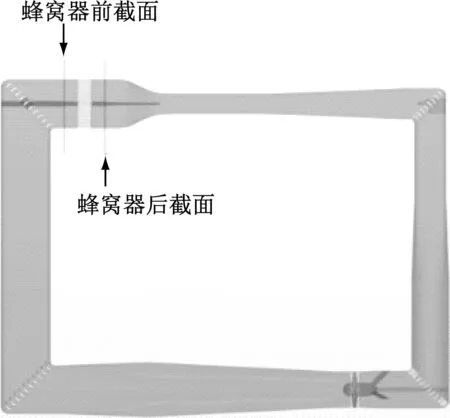
圖10 截取的蜂窩器前后截面的位置示意圖

圖11 完整模型、不含蜂窩器模型、不含蜂窩器和導流片模型蜂窩器前截面速度分布
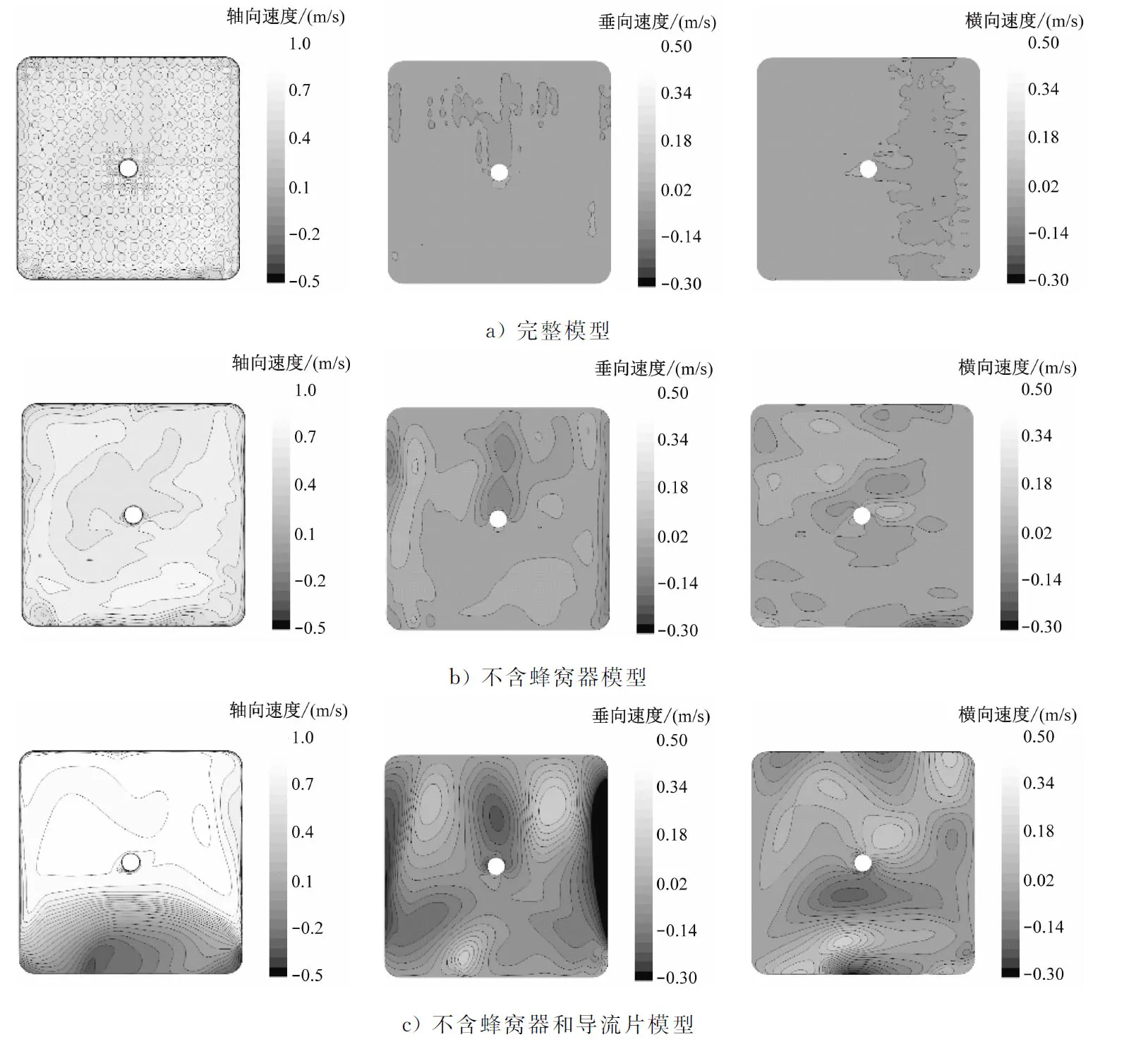
c) 不含蜂窩器和導流片模型圖12 完整模型、不含蜂窩器模型、不含蜂窩器和導流片模型蜂窩器后截面速度分布
由圖8可知,蜂窩器對空泡水洞的流場特性的影響不大,但4個拐角處的導流片對空泡水洞的流場特性的影響較大,能使水流的流動方向發生改變,在很大程度上消除流動分離,使水流的流動更順暢,相應地減小非定常流動產生的流動噪聲和能量耗散。
由圖9可知,對于距離工作段入口0.5 m的截面,完整模型與不含蜂窩器模型的軸向速度的分布比較接近,而橫向速度和垂向速度的分布有明顯差異。
由圖11和圖12可知:完整模型與不含蜂窩器模型的蜂窩器前截面速度的分布基本一致;完整模型的水流在經過蜂窩器之后的軸向速度呈孔狀分布,垂向速度和橫向速度明顯減小;不含蜂窩器和導流片模型的蜂窩器前后截面速度的不均勻度明顯比完整模型和不含蜂窩器模型高。
5 結 語
本文采用CFD黏流方法對空泡水洞的流場進行了數值模擬,并對數值方法的有效性進行了試驗驗證。在此基礎上,分別對不含蜂窩器空泡水洞模型、不含蜂窩器和導流片空泡水洞模型的流場特性進行了數值模擬,主要得到以下結論:
1) 運用數值模擬方法能較為有效地對空泡水洞的流場特性進行模擬,數值計算結果與試驗測試結果的吻合性較好,證明了數值模擬方法的可行性和有效性。
2) 由試驗測試結果可知,上海船研所正在運營的空泡水洞的工作段流場的不均勻度較低,能很好地滿足試驗要求。
3) 該空泡水洞中的蜂窩器的主要作用是消除工作段流體的垂向速度和橫向速度,對軸向速度的分布和流經蜂窩器水流的平均速度的影響較小。
4) 4個拐角處的導流片對空泡水洞的流場特性的影響較大。導流片能使水流的流動方向發生改變,在很大程度上消除流動分離,使水流的流動更順暢,減小流動噪聲和減少能量耗散,保證空泡水洞工作段水流的速度和流動均勻性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19