六自由度水下機械臂設計與分析*
2023-08-31 02:48:08趙飛
機電工程 2023年8期
趙 飛
(鎮(zhèn)江市高等專科學校 電氣與信息學院,江蘇 鎮(zhèn)江 212028)
0 引 言
有纜水下機器人(ROV)經(jīng)過了半個多世紀的發(fā)展,目前已受到了各國的廣泛關注。其具有靈活的大深度水下運動能力,可替代潛水員進入較深水域和危險環(huán)境進行工作,是眾多海洋工程項目(如水下油氣開采、輸油管道和海底電纜鋪設等)必不可少的水下作業(yè)裝備,其中深海機械臂是ROV深海作業(yè)的主要操作設備。
在各國開發(fā)的ROV中,均配有多功能機械臂[1],如SMD的QUANTUM,伍茲霍爾海洋研究所研制的JASON ROV,上海交通大學承擔的國家科技重大專項——“海龍?zhí)枴钡?但針對水下采油樹作業(yè)要求的ROV水下機械臂目前仍不多見。
國內(nèi)外學者對機械臂的設計、控制、仿真、實驗等方面進行了廣泛的研究。從應用領域看,ROV主要有水下和陸用兩種。
1)水下機械臂方面的研究。胡淼等人[2]設計了一種艦船用水下應急維修機械臂,采用解析法對機械臂運動學逆解進行了計算;但其功能較簡單,無法完成復雜的作業(yè)要求,只是應急使用。魏曉霞等人[3]設計了一種核電站用水下爬行與潛浮雙功能機器人,建立了四自由度活動關節(jié)運動學模型,得到了其運動學特征方程。CHENG Yu-jun等人[4]研究了在笛卡爾坐標系下,具有不同運動姿態(tài)的水下機械手的水動力系數(shù)和流場特性,以及在亞臨界范圍內(nèi),機械臂的截面形狀、間距和相互作用對水動力性能的影響。LI De-jun等人[5]提出了一種水下機械手末端位置偏移的補償方法,提高了水下機器人運動學模型的精度,為水下機器人精確的位置控制奠定了基礎。WANG Jun-li等人[6]提出了一種機械手關節(jié)角度的估計方法,該方法對于水下機器人自動控制的狀態(tài)估計是可行的;但是該方法控制策略較復雜,同步效果無主從控制理想。
2)陸用機械臂方面的研究。劉萍等人[7-9]利用MATLAB軟件,對五自由度關節(jié)式機械手、KUKA機器人、六自由度工業(yè)機器人手臂運動學特性進行了仿真分析。高東強等人[10-11]對SCARA機械手、工業(yè)機器人的軌跡規(guī)劃和運動學開展了仿真分析。梁一等人[12]對設計的六自由度水下機械臂進行了試驗驗證等相關方面的研究。陶鑫瑞等人[13-15]對氣動機械手、氣動三自由度并聯(lián)平移型機器人的控制策略進行了研究,各種陸用機械臂的分析方法對于水下機械臂的分析有一定的參考和借鑒作用;但其設計的機械臂手爪功能普遍簡單,作業(yè)能力有限。SUN Hao等人[16]采用DH表示法和歐拉-拉格朗日動力學法,建立了六自由度機械手的全驅動系統(tǒng)模型。LIU Zhu-feng等人[17]采用增材制造方法,創(chuàng)建了多自由度制造平臺,在先進制造領域中顯示出了該應用的前景。WU Jun等人[18]基于動態(tài)和控制系統(tǒng)的模型,對二自由度并聯(lián)機器人的機電性能進行了預測。
綜上所述,陸用機械臂及水下機械臂的設計和分析研究較多,但夾持手爪設計的普遍簡單、功能不強。針對ROV的深海工作環(huán)境,具備六自由度的水下機械臂設計,尤其是帶有平動夾持手爪滿足多種作業(yè)需求的機械臂尚未可見。
基于此,筆者以ROV應用為背景,設計六自由度水下機械臂,采用四邊形機構冗余設計夾持手爪(使其滿足水下采油樹作業(yè)要求,同時六自由度賦予機械臂極大的作業(yè)范圍);利用D-H參數(shù)法求解機械臂的正、逆運動學,并利用MATLAB軟件仿真各活動關節(jié)的運動軌跡,結合蒙特卡洛法求解機械臂的工作空間,驗證機械臂設計和分析的合理性和正確性;最后對搭載在ROV上的六自由度機械臂開展陸上和水下實驗。
1 總體設計
筆者設計的六自由度水下機械臂,采用了液壓驅動,主從手控制方式[19]。其主要結構可分為機械手本體、液壓驅動系統(tǒng)、控制系統(tǒng)3部分。
1)機械手本體采用關節(jié)型結構,其特點在于結構緊湊,工作范圍廣;2)液壓驅動系統(tǒng)適合大負載的輸出,其具有壓力補償特性,能夠自適應深海壓力變化,保證系統(tǒng)的可靠性;3)控制系統(tǒng)采用的是主從控制方式,通過視頻監(jiān)控臺,由操作員操作主手,通過控制器對從手進行控制,實現(xiàn)了超視距的遙控控制目標。
結合水下作業(yè)要求,筆者所設計的水下機械臂技術參數(shù)如表1所示。
六自由度機械臂本體包括6個活動關節(jié)和1個夾持手爪。6個關節(jié)中包含3個腕關節(jié)(關節(jié)一、關節(jié)五、關節(jié)六)和3個肘關節(jié)(關節(jié)二、關節(jié)三、關節(jié)四)。具體的機械臂結構如圖1所示。

圖1 機械臂結構
筆者所設計的機械臂各個活動關節(jié)轉角范圍如表2所示。

表2 機械臂活動關節(jié)轉角范圍
水下機械臂采用閉式壓力自適應液壓系統(tǒng),由變頻電機驅動恒量泵輸出油壓,經(jīng)過控制閥輸入液壓缸/液壓馬達。液壓系統(tǒng)具有壓力自適應性,能夠根據(jù)工作水深,自動調節(jié)系統(tǒng)工作壓力,解決了深海工況下的密封及耐壓問題。
六自由度機械臂液壓系統(tǒng)原理圖如圖2所示。
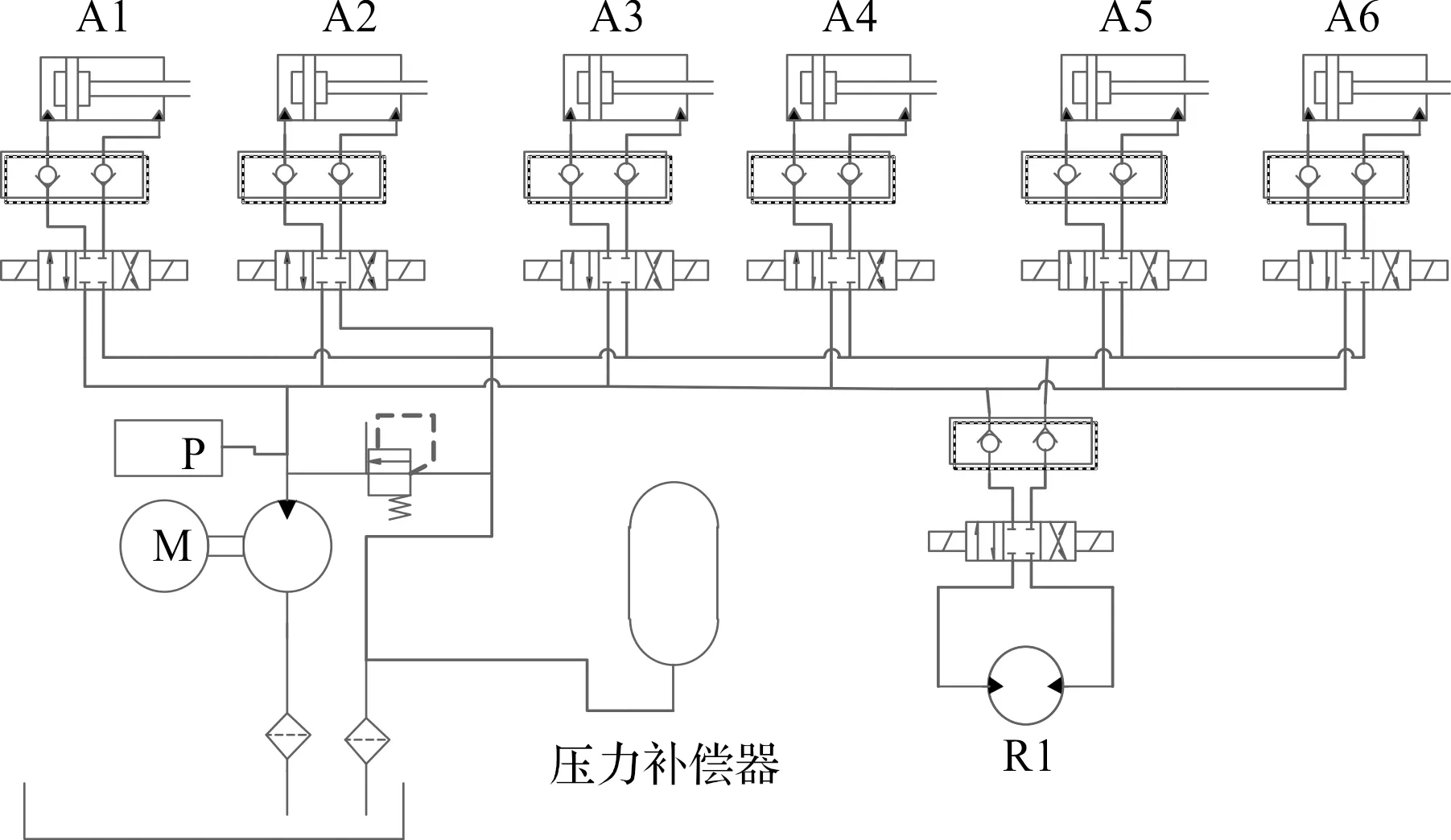
圖2 六自由度機械臂液壓系統(tǒng)原理圖
水下機械臂控制系統(tǒng)采用主從式控制方式,其控制系統(tǒng)包括主手、水面控制系統(tǒng)及水下主控系統(tǒng)。主手輸出操作控制信號,經(jīng)過主手控制器輸入至從手控制器,從手控制器控制液壓系統(tǒng)以驅動從手動作。其中,操作員通過視覺對機械手的主手進行操作,主手有各個關節(jié)的角度傳感器,控制器檢測各關節(jié)的角度對從手的關節(jié)驅動器(液壓缸或擺動缸)的位置進行控制。
主手結構如圖3所示。
2 夾持手爪及活動關節(jié)設計
2.1 夾持手爪設計
機械臂的夾持手爪至關重要,決定了機械臂執(zhí)行任務的通用性和廣泛性,好的夾持手爪可以極大地提高水下機器人的工作效率和可靠性。夾持手爪采用四邊形機構冗余設計,保證其開口始終處于平動張開或夾緊狀態(tài)。
夾持手爪結構如圖4所示。
夾持手爪運動和受力分析示意圖如圖5所示。

圖5 夾持手爪運動和受力分析示意圖
手爪閉合時,液壓缸不輸出作用力,此時的o5初始位置為:
a0=l1cosa
(1)
手爪張開時,液壓缸作用行程a,此時o5終止位置如下:
a+a0=l1cosβ+rsinγ
(2)
液壓缸行程a的表達式為:
a=l1(cosβ-cosα)+rsinγ
(3)
由幾何關系可知:
(4)
(5)
手爪開合尺寸2b與液壓缸作用行程a滿足:
(6)
根據(jù)o2和o5處受力平衡,有:
∑Fo2=0
(7)
∑Fo5=0
(8)
根據(jù)o處力矩平衡,有:
∑Mo=0
(9)
綜上所述,可求得液壓缸的驅動力P和手爪夾緊力F的關系:
(10)
(11)
根據(jù)表1水下機械臂技術參數(shù),筆者結合實際設計要求,確定已知量:b=60 mm,d=18 mm,r=12 mm,α=60°,μ=0.3。
根據(jù)液壓缸的驅動力P最小和液壓缸行程a最短原則,筆者建立多目標優(yōu)化數(shù)學模型(此時,設計變量分別為l1,l2,γ,β,共4個)。
目標函數(shù)為:
(12)
約束函數(shù)為:
(13)
手爪夾緊力F關系式為:
F=k1k2k3G
(14)
式中:k1為安全系數(shù),1.2;k2為加速度工作系數(shù),1.1;k3為方位系數(shù),4。
筆者利用MATLAB軟件求解變量,并取整得出:a=20 mm,l2=66 mm,β=41°,γ=60°。
2.2 活動關節(jié)設計
6個活動關節(jié)的運動機構都可以簡化成擺動導桿機構。活動關節(jié)的機構簡圖如圖6所示。

圖6 活動關節(jié)機構簡圖
根據(jù)O點的力矩平衡,建立關系式:
(15)
根據(jù)余弦定理有:
(16)
結合機械臂的作業(yè)情況,筆者合理選擇各參數(shù),在保證結構緊湊和表2中要求的機械臂活動關節(jié)轉角范圍前提下,避免發(fā)生運動干涉。
3 運動學求解
3.1 正運動求解
筆者對機械臂采用D-H參數(shù)法進行了數(shù)學建模,初始坐標系選擇在基座上,按照右手定則和D-H參數(shù)法規(guī)則,依次建立各個關節(jié)處的坐標系。
水下機械臂數(shù)學模型坐標系如圖7所示。

圖7 機械臂坐標系
模型的機械臂D-H參數(shù)如表3所示。

表3 機械臂D-H參數(shù)
表3中,水下機械臂的具體結構參數(shù)為:l1=100 mm,l2=317 mm,l3=270 mm,l4=100 mm,l5=281 mm。
D-H參數(shù)法是通過相鄰各個關節(jié)的齊次矩陣逐次變換的,以此來完成水下機械臂基座坐標系到末端坐標系的變換工作。其中,通用變換矩陣通式為:
i-1Ti=Rot(X,αi-1)Trans
(li-1,0,0)Trans(0,0,di)Rot(Z,θi)
(17)
其中:
(18)
(19)
(20)
(21)
求解的變換矩陣通式為:
i-1Ti=
(22)
筆者將表3中水下機械臂各參數(shù)數(shù)據(jù)代入變換矩陣通式,可求解出各個關節(jié)處的齊次變換矩陣如下:
(23)
(24)
(25)
(26)
(27)
(28)
(29)
式中:R3×3為機械臂姿態(tài);P1×3為機械臂位置。
顯然,水下機械臂末端執(zhí)行器的位置和姿態(tài)是受各個關節(jié)的運動狀態(tài)直接影響的,即:
(30)
其中,
c23=cos(θ2+θ3);s234=sin(θ2+θ3+θ4)。
3.2 逆運動求解
筆者根據(jù)已知機械臂末端執(zhí)行器的位置姿態(tài),反向求解每個關節(jié)的旋轉角度,反映出的末端執(zhí)行器位姿到各個關節(jié)轉角的映射問題,其對于后續(xù)機械臂的路徑規(guī)劃和運動控制都是至關重要的。
可直接求解出θ1,公式如下:

(31)
(32)
故有:
pyc1-pxs1=-l5s5
(33)
(34)
(35)
求解出θ5,公式如下:
(36)
結合下式:
(37)
求解出θ6,如下:
θ6=θ56-θ5
(38)
(39)
故有:
(40)
求解出θ2,公式如下:
(41)
且有:
(42)
(43)
(44)
故有:
(45)
(46)
求解出θ3,公式如下:
(47)
求解出θ4,公式如下:
θ4=θ234-θ2-θ3
(48)
4 仿真分析
4.1 干涉分析
水下機械臂的夾持手爪采用冗余結構,各零件在滿足設定參數(shù)目標時,極易發(fā)生干涉,導致設定參數(shù)目標無法實現(xiàn)或零件碰撞損壞。為此,需要進行干涉檢查,在設計階段分為2D總體干涉檢查、3D結構干涉檢查和運動仿真干涉檢查3個過程,確保設計的準確性和可實施性。
筆者借助Solid works軟件對活動關節(jié)進行運動仿真,保證各零件間無干涉。
夾持卡爪部分結構干涉檢查示意圖如圖8所示。

圖8 夾持卡爪部分干涉檢查示意圖
4.2 運動軌跡仿真
筆者對機械臂由初始位置到目標位置的行程進行運動軌跡仿真,以研究其各個關節(jié)由初始位置到目標位置過程中的轉角、速度和加速度曲線的規(guī)律和特征。為使運動軌跡仿真分析簡便,假設初始位置關節(jié)角度為[0 0 0 0 0 0],目標位置關節(jié)角度為[0pi/4 -pi/6 0pi/6 0]。
在MATLAB軟件中,按照圖1機械臂的結構和表2中關節(jié)轉角范圍,筆者建立水下機械臂的仿真模型。機械臂仿真模型的初始位置如圖9所示。

圖9 機械臂仿真模型初始位置
機械臂初始位置的關節(jié)角度為[0 0 0 0 0 0],需要驗證機械臂的仿真模型位置姿態(tài)與Solid works設計軟件中的三維模型位置姿態(tài)完全相同。
機械臂三維設計模型的初始位置如圖10所示。

圖10 機械臂三維設計模型初始位置
此時機械臂總長為1 068 mm,且與利用D-H參數(shù)法建立的數(shù)學模型和MATLAB軟件中的仿真模型一致,驗證了MATLAB軟件中仿真模型初始位置是正確的、可信的。
為確保機械臂仿真模型在各個目標位置都與設計模型一致,假設任意目標位置為[0pi/4 -pi/6 0pi/6 0]時,此時機械臂末端執(zhí)行器的數(shù)學模型計算位置矢量為:
(49)
仿真模型顯示結果如下:
(50)
計算位置矢量與仿真模型顯示結果保持了高度一致(其中,仿真模型計算單位為m,求解數(shù)學模型單位為mm),通過對初始位置和假設的任意目標位置驗證,保證了機械臂仿真模型運動軌跡的真實性,反映出所設計機械臂的運動姿態(tài)。
初始位置關節(jié)角度為[0 0 0 0 0 0],目標位置關節(jié)角度為[-pi/3pi/4 -pi/2pi/3pi/6pi/2],機械臂各關節(jié)位置變化曲線仿真結果如圖11所示。

圖11 機械臂各關節(jié)位置變化曲線
機械臂各關節(jié)速度變化曲線如圖12所示。
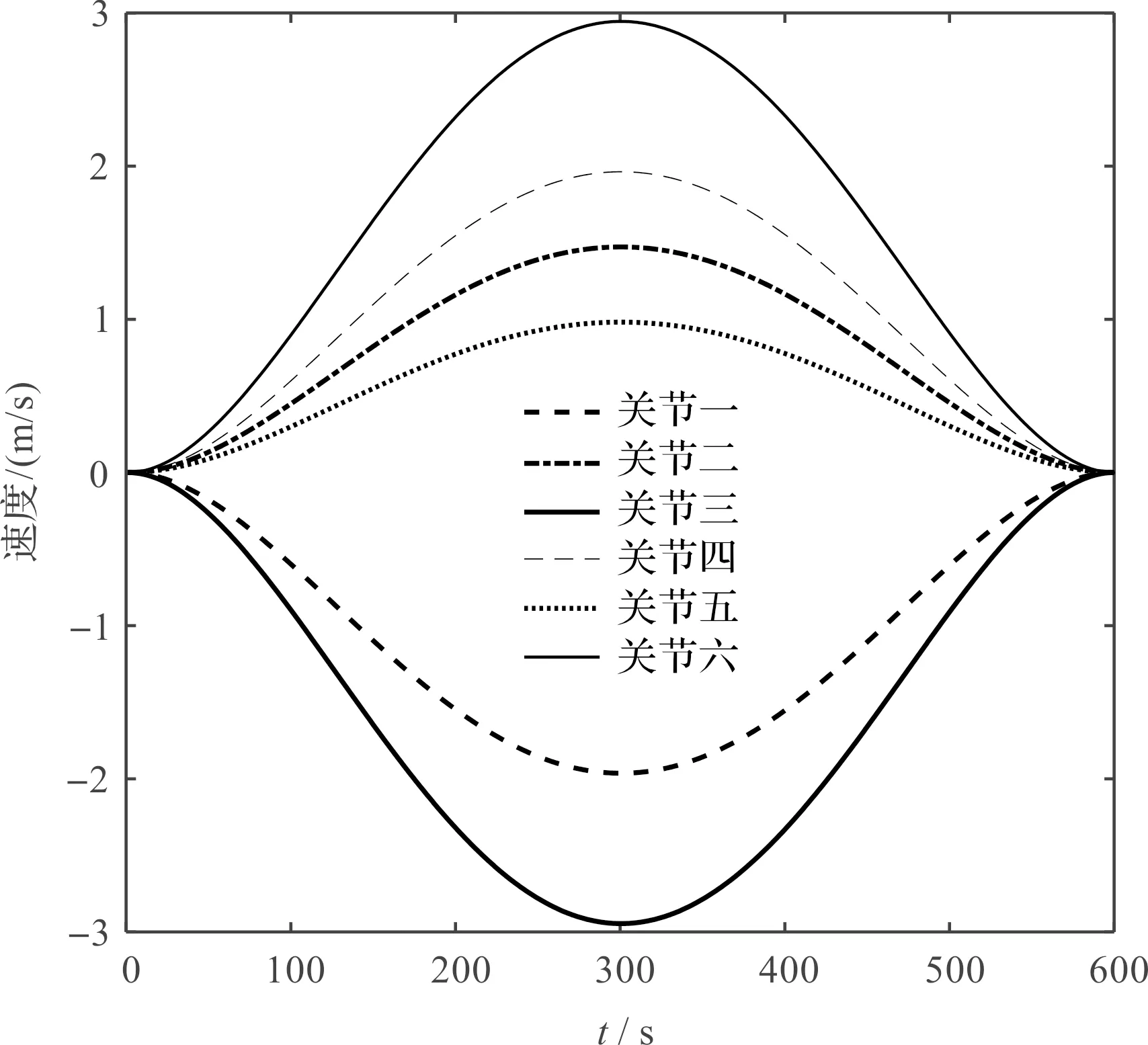
圖12 機械臂各關節(jié)速度變化曲線
機械臂各關節(jié)加速度變化曲線如圖13所示。

圖13 機械臂各關節(jié)加速度變化曲線
根據(jù)運動軌跡仿真可知:在整個過程中,機械臂的各個關節(jié)速度和加速度曲線都是光滑平順的、無突變點,不存在超調現(xiàn)象,速度曲線與加速度曲線呈正弦曲線規(guī)律變化趨勢,且相互對應,加減速性能良好,可以保證機械臂的實際作業(yè)要求。
4.3 工作空間仿真
筆者利用蒙特卡洛法隨機抽樣,對水下機械臂末端執(zhí)行器到達的全部空間點進行采集,來展示機械臂的實際工作空間,求解出末端執(zhí)行器的極限工作位置,確保水下機械臂滿足設計指標要求。
水下機械臂采樣的工作空間仿真如圖14所示(選取隨機采樣20 000個點)。

圖14 機械臂工作空間采樣仿真
機械臂末端能夠到達的采樣工作空間點云三維圖,如圖15所示。

圖15 工作空間點云三維圖
水下機械臂采樣工作空間XY平面云圖,如圖16所示。
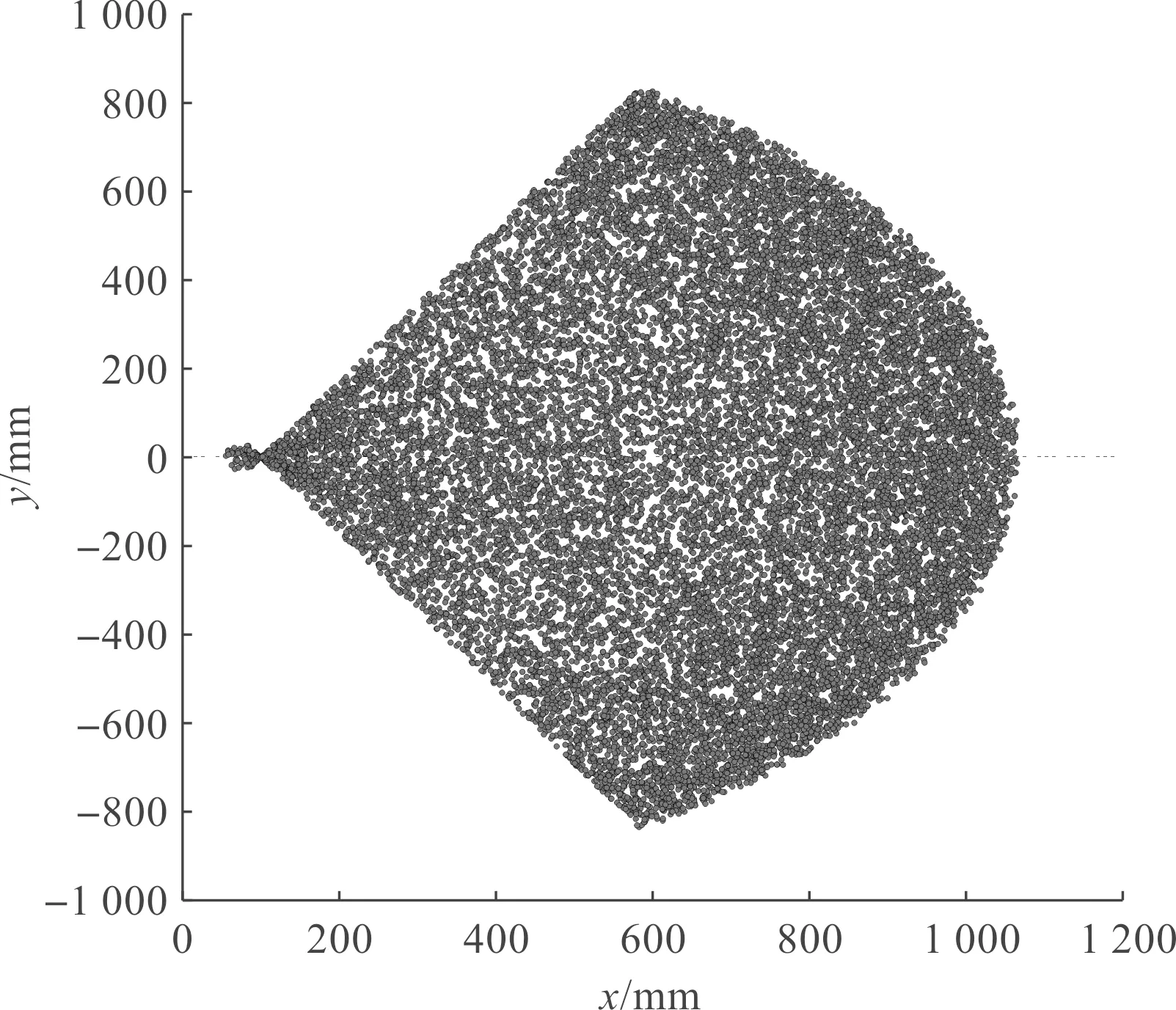
圖16 工作空間XY平面云圖
水下機械臂采樣工作空間XZ平面云圖,如圖17所示。

圖17 工作空間XZ平面云圖
水下機械臂采樣工作空間YZ平面云圖,如圖18所示。
筆者對隨機采樣工作空間點進行統(tǒng)計,求解的機械臂末端能夠到達的采樣工作空間范圍如表4所示。

表4 隨機采樣點工作空間范圍
根據(jù)工作空間采樣仿真分析可知:求解的機械臂末端工作空間X坐標范圍是94.1 mm~1 029.2 mm,Y坐標范圍是-814.1 mm~768.9 mm,Z坐標范圍是-310 mm~643 mm,其數(shù)值范圍滿足設計要求。
該工作范圍的限界為下一步研究主從控制提供了位置參考。
5 樣機及測試
筆者通過控制主機械臂6個自由度和夾持手爪開閉按鈕,使從機械臂完成6個自由度運動控制和夾持手爪開閉功能的工作。考慮到安全問題,測試時每次只操縱主手一個自由度,觀測從機械手是否達到預期的響應。
關節(jié)五運動調試如圖19所示。

圖19 關節(jié)五運動調試
關節(jié)四運動調試如圖20所示。
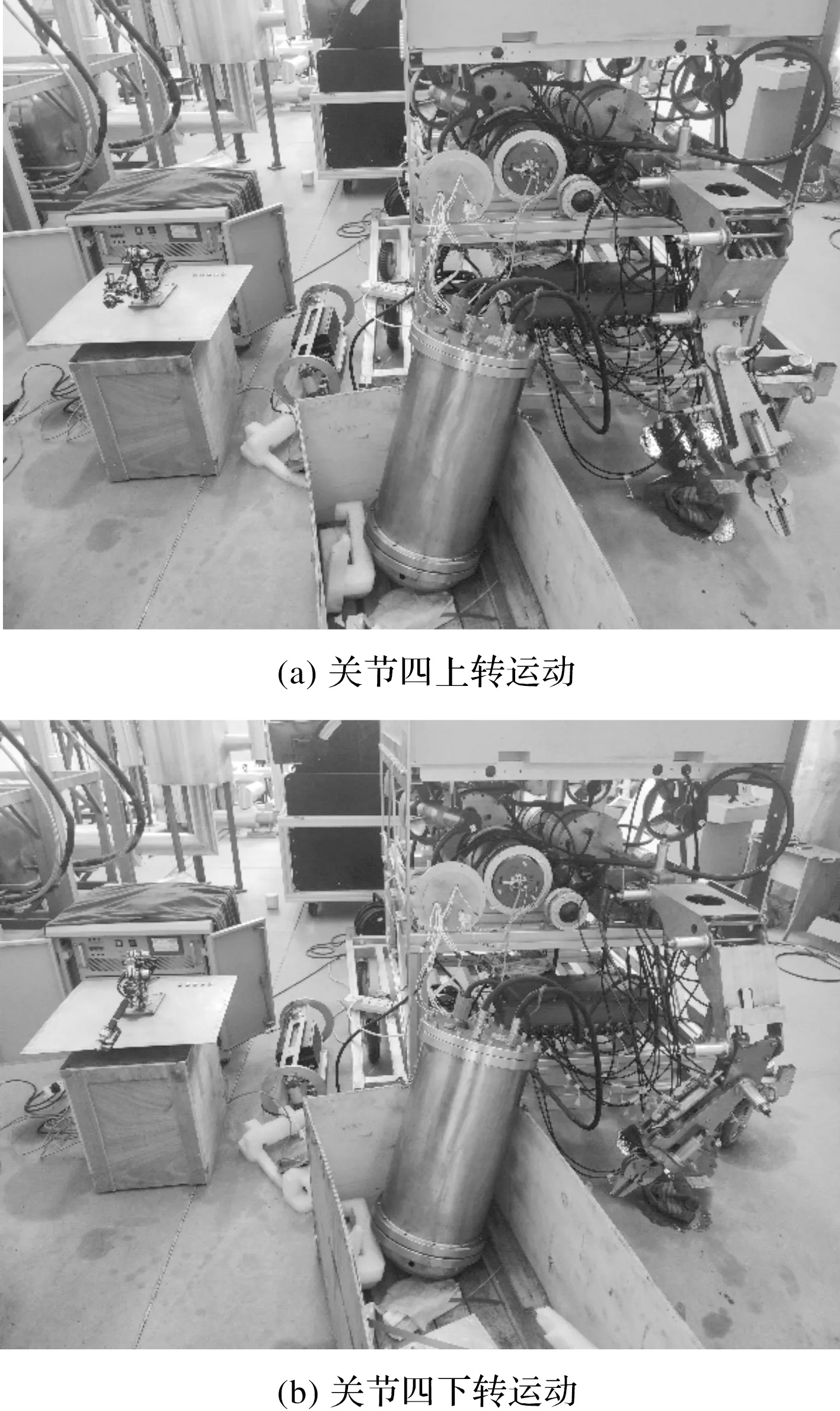
圖20 關節(jié)四運動調試
實驗表明:從機械臂能夠跟隨主機械臂運動,加減速性能良好,各關節(jié)轉角范圍滿足設計要求。
搭載水下從機械臂的ROV樣機如圖21所示。

圖21 搭載水下從機械臂的ROV樣機
主機械臂樣機如圖22所示。

圖22 主機械臂樣機
主、從機械臂系統(tǒng)聯(lián)調測試通過后即可開展水下實驗,進一步驗證設計的合理性。
ROV設備在水中無動力懸浮和深潛實驗時固定攝像頭拍攝的機械臂,如圖23所示。
圖23 水下實驗
6 結束語
針對ROV上搭載的機械臂作業(yè)能力弱、范圍小的問題,筆者設計了一種帶有平動開合功能夾持手爪的六自由度水下機械臂,其采用液壓驅動,主從手控制方式,實現(xiàn)了主手對從手的關節(jié)驅動器(液壓缸或擺動缸)的位置控制目的。
首先,筆者求解了其正、逆運動學,并利用MATLAB仿真分析了其運動軌跡;然后,采用蒙特卡洛法求解了機械臂的工作空間范圍;最后,搭建樣機進行了實驗驗證。
研究結果表明:
1)采用多目標優(yōu)化規(guī)則設計的夾持手爪,其液壓缸最短行程在20 mm時,即可實現(xiàn)手爪的120 mm平動開合范圍目標,樣機實驗驗證了該設計計算的正確性;
2)仿真分析得出了機械臂各個關節(jié)位置、速度、加速度曲線平滑、無突變,不存在超調現(xiàn)象,樣機實驗證實了各個活動關節(jié)加減速性能良好;
3)仿真分析求解的機械臂末端工作空間X坐標范圍是94.1 mm~1 029.2 mm,Y坐標范圍是-814.1 mm~768.9 mm,Z坐標范圍是-310 mm~643 mm,該范圍與設計指標基本一致,可以滿足其作業(yè)要求。
后續(xù)工作中,筆者將繼續(xù)開展樣機的實驗研究,不斷優(yōu)化完善機械臂的結構和功能,并開展水下雙機械臂協(xié)同動作控制研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09