sEMG 多特征值融合的神經網絡下肢關節角度預測
2023-08-28 13:13:00鄧福鈴
傳感器世界 2023年6期
關鍵詞:特征
鄧福鈴
重慶交通大學,重慶 400060
0 引言
近年來,助力康復型外骨骼機器人的研究在我國變得異常火熱。主要是由于我國腦卒中、脊髓損傷發病率上升導致許多人出現運動障礙,這部分患者在術后往往需要做專門的康復治療才能獲得部分行動能力。傳統的康復訓練通常依靠康復理療師手動帶動患者患肢進行康復訓練,即被動康復訓練,但由于我國人口基數大,人均醫療資源面臨嚴重不足,導致很多人不能在術后得到專業的康復訓練,造成恢復緩慢,嚴重的可能導致情況進一步惡化。康復機器人的出現恰好解決了這一困境,但傳統的康復機器人與患者之間主要通過被動訓練的方式,即康復機器人按照預定的標準步態軌跡帶動患者訓練,這種方式明顯的缺陷就是人不能按照自己意愿行走,與標準步態出現出入時可能對患者造成二次傷害。因此,越來越多的研究者開始關注康復機器人的主動訓練,即人機交互,而實現人機交互的前提是人體運動意圖識別。
人體生理電信號是由于神經元細胞受到刺激,體內的鈉鉀離子濃度發生改變,產生電位差;接著,將這些電位脈沖傳到相應的組織器官中,產生較為強烈的電信號,這個信號能夠較為直觀地反映人體運動意圖[1]。常見的人體生理信號有肌電(Electromyography,EMG)、腦電(Electroencephalography,EEG)以及眼電(Electrooculography,EOG)等[2]。其中,表面肌電信號由肌肉產生,并且比肢體運動超前30~150 ms,非常適合用來預測下肢關節轉動角度[3]。
基于此,近年來,國內外學者研究出多種方法用于肌電信號準確地預測下肢關節轉動角度,如神經肌肉骨骼模型、線性模型、支持向量機(Support Vector Machine,SVM)和人工神經網絡(Artificial Neural Network,ANN)。前幾種方法需要在特定的模型中才能預測得很精準,適用性不強,人工神經網絡(ANN)恰好克服了這個缺點,而且許多學者也證實ANN 具有較高的預測精準度。王剛等人[4]用徑向基函數(Radial Basis Function,RBF)網絡建立下肢sEMG 信號與關節角度的非線性關系,實現了人體下肢運動意圖識別。劉克平等人[5-6]分別用廣義回歸神經網絡(Generalized Regression Neural Network,GRNN)和自適應模糊神經網絡(Adaptive Fuzzy Neural Network,AFNN)對關節角度進行預測,與RBF 神經網絡相比,能夠較好地估計人體關節角度。史小華等人[7]則采用誤差反向傳播訓練(Error Back Propagation Training)BP 神經網絡對下肢體髖關節、膝關節、踝關節等3 個關節角度進行識別預測,最終驗證該方法對肌電圖和脊髓損傷患者的關節角度估計均有良好地識別預測性能。
相比于其他神經網絡,BP 神經網絡具有簡單易用、適用廣泛、學習效率高、收斂性、泛化能力等諸多優點,非常適用于未來的人機交互。因此,使用BP 神經網絡對人體運動意圖進行識別具有很好的實用性。但BP神經網絡初始權重和閾值是隨機生成的,具有不可控性,而權值和閾值會極大地影響BP 神經網絡的訓練,因此,本文用遺傳算法優化初始的權值、閾值。通過實驗對比,遺傳算法優化的BP 神經網絡相比于傳統BP 神經網絡,預測角度更加精準。
1 sEMG 信號處理
1.1 sEMG 信號干擾與去噪處理
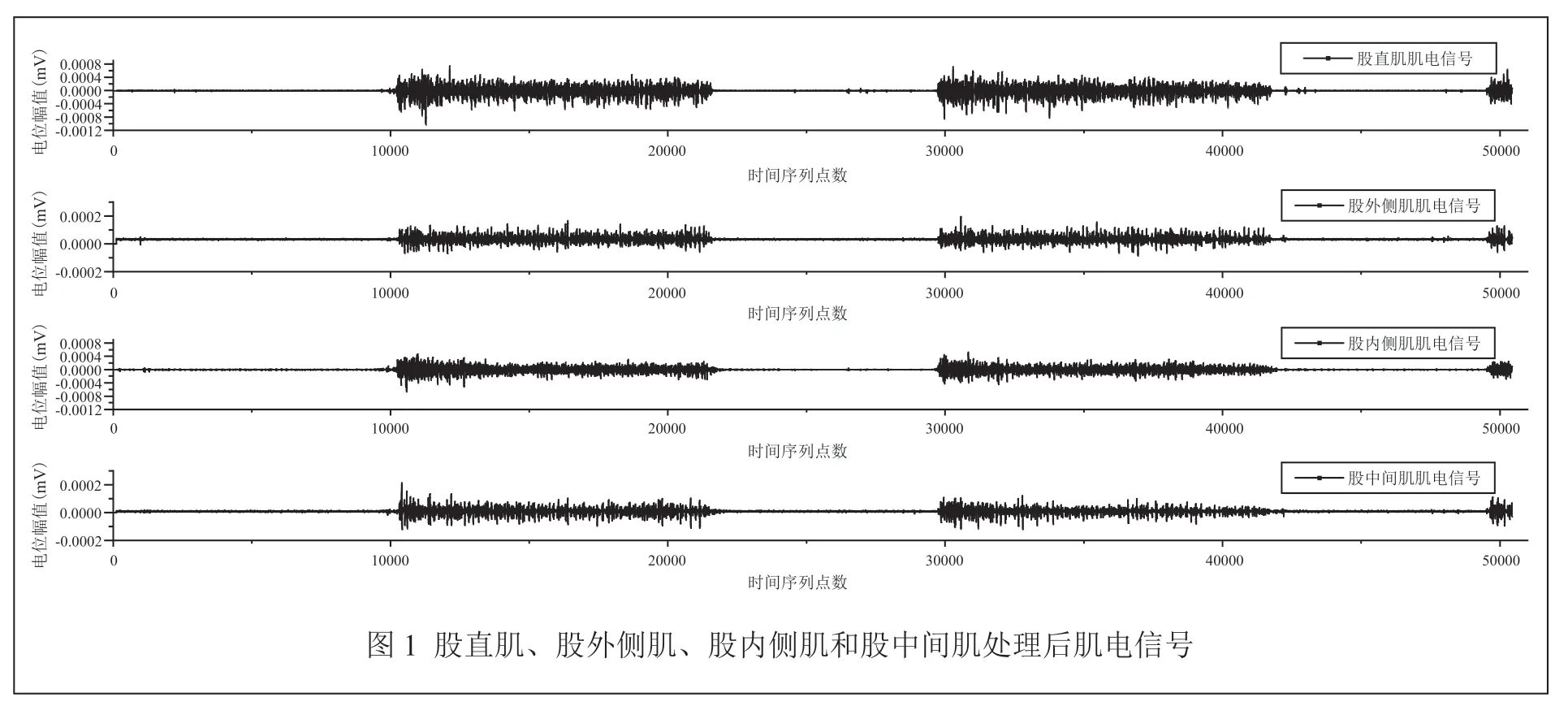
表面肌電信號的采集過程不可避免地受到外界的干擾,我國的工頻干擾在50 Hz,而肌電信號有用信號頻率位于0~500 Hz,主要集中在20~150 Hz 之間,因此,采用IIR 數字陷波濾波器中的巴特沃茲消除工頻干擾。因為肌電信號頻率主要集中在20~150 Hz 之間,設計低截止頻率為10 Hz,高截止頻率為300 Hz帶通濾波器,因為不存在理想濾波器,因此在設計截止頻率時,設計一個20~30 Hz、250~300 Hz 的過渡區域。處理結果如圖1 所示。
1.2 sEMG 特征提取
表面肌電信號提取的特征主要包括時域特征(Temporal (time) Domain,TD)、頻域特征(Frequency Domain,FD)、時頻域特征(Time Frequency Domain,TFD)。其中,時域特征能體現出肌電信號隨時間變化的情況,在研究中被廣泛應用,如塞繆爾·奧文等人[8]選擇時域分析中的均方根作為特征提取,分類速率更快,但由于表面肌電信號是一段非平穩隨機信號,單一特征值不能準確描述信號特征,導致預測精度較差。因此,很多學者提出用多個特征值來描述信號特征,如石永杰等人[9]用均方根(Root Mean Square,RMS)、平均絕對值(Mean Absolute Value,MAV)、波形長度(Waveform Length,WL)和方差(Variance,VAR)作為特征,預測精度明顯提升。常見的時域特征有最大值、最小值、均方根、平均絕對值、標準差和積分肌電等,為了保證分類速率和分類精度,因此不能采用全部的特征值。為此,張杰毅[10]采用斯皮爾曼相關系數對多個特征值進行相關性分析,結果表明,RMS、MAV、VAR 相關性差異較小,具有很好的效果。肌電信號特征值的選取對識別精度的影響很大。綜合考慮,本文采用時域特征中的均方根(RMS)、平均絕對值(MAV)、方差(VAR)作為特征值。
(1)均方根(RMS):指某段時間內所有振幅的均方根值,描述一段時間內表面肌電的平均變化特征。RMS 的大小決定于表面肌電振幅的高低,可通過比較不同時期的RMS,確定疲勞發生的時間和程度。一般而言,無論是靜力性還是動力性運動,從初始態到疲勞態的過程中,表面肌電信號的振幅均會增加,即隨著疲勞的增加,RMS 增大。如公式(1):
其中,i為各個采樣點的序號;N為一個滑動窗內的采樣點總數;x為一個采樣點肌電信號的幅值。
(2)平均絕對值(MAV):平均絕對值可用于表征肌電信號的統計學特征,將信號幅值轉化為正值,直觀體現肌肉發力收縮程度,如公式(2):
(3)方差(VAR):方差用于描述數據與其均值的距離平方,可體現肌電信號離散程度,如公式(3):
通常使用滑動窗對特征進行提取,其中滑窗長度設計為4,000(采樣點數),窗口滑動長度設計為200(采樣點數),得到的股直肌時域特征圖如圖2 所示。其余肌肉信號特征也按此方法進行提取。

1.3 構建GA-BP 網絡模型
1.3.1 BP 神經網絡
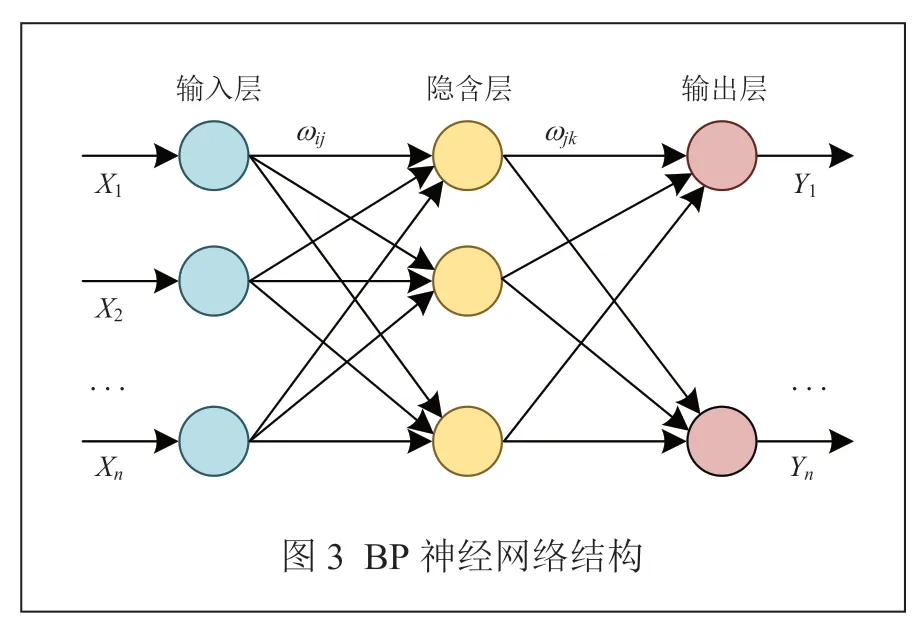
BP 神經網絡是一種按誤差逆向傳播算法訓練的多層前饋網絡,由于其結構簡單,被廣泛應用。其基本思想是梯度下降法利用誤差反傳,反復學習訓練,使網絡的實際輸出值和期望輸出值的誤差均方差均為最小。其基本結構包含輸入層、隱含層、輸出層,最簡單的BP 神經網絡結構如圖3 所示。
BP 神經網絡每一層都有若干神經元,當進行訓練時,神經元的激活值將從輸入層經各隱含層向輸出層傳播,然后在輸出層與實際輸入作比對后,將誤差進行反向傳播,經隱含層到輸入層,逐層修正連接權值和閾值,然后將修正后新的權值和樣本再進行正向傳播,反復重復,直至誤差達到最小,正確率最高。從BP 神經網絡的工作原理可以看出,初始的權值和閾值的選取對于BP 神經網絡訓練的時間長短有很大影響,而控制系統對肌電信號處理時間有較高要求,因此,考慮對BP 神經網絡初始權值和閾值進行優化。
1.3.2 遺傳算法優化BP 神經網絡
遺傳算法(Genetic Algorithm,GA)是模擬達爾文進化論的自然選擇和遺傳機理的生物進化過程的計算模型,是一種通過模擬自然進化過程搜尋最優解的方法,具有更好的全局尋優能力,極好地克服了BP神經網絡容易陷入局部最優的缺陷。遺傳算法的基本過程為:編碼、初始化種群、評估種群中個體適應度、選擇、交叉、變異、演化。編碼就是找到一種對問題的各種潛在解進行數字化的方法,一般用染色體來表示求解的問題,內部基因編碼代表問題的各種潛在解;初始化種群是將問題可能潛在的解集作為一個大的種群;評估種群中個體適應度是通過適應度函數對種群中個體的優劣進行評價;然后進行優勝劣汰的選擇;留下的最優個體根據遺傳算子進行組合交叉和變異;最終產生代表新的解集的種群,促進種群的進化,找到問題的最優解。
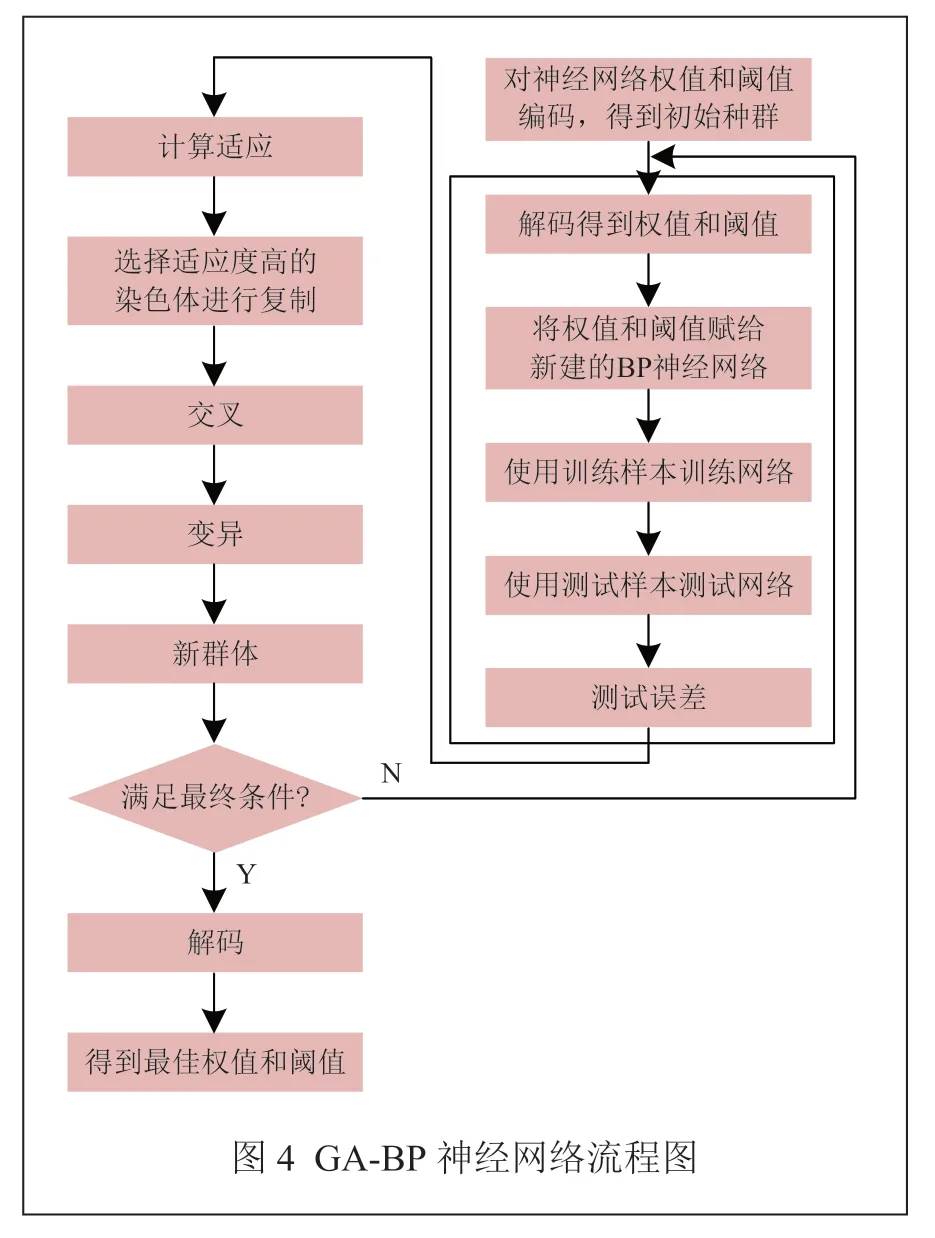
BP 神經網絡的初始權值一般選擇(-1,1)之間的隨機數,也可以選擇(-2.4/n,2.4/n)之間的隨機數,其中,n為輸入特征個數。初始權值的選取對網絡訓練結果的影響很大,但在實際訓練時往往找不到最佳的權值,只能隨機輸入,這樣極有可能導致網絡訓練時間較長,無法滿足快速處理的要求。因此,引入遺傳算法來優化出最佳的初始權值和閾值,對神經網絡權值和閾值進行編碼,得到初始種群,然后將權值和閾值賦給BP神經網絡,訓練后得到的測試誤差作為個體適應度值,然后進行選擇、交叉、變異,尋找最優個體,即最優的權值和閾值。遺傳算法優化的BP 神經網絡流程圖如圖4 所示。
2 下肢關節角度預測結果與分析
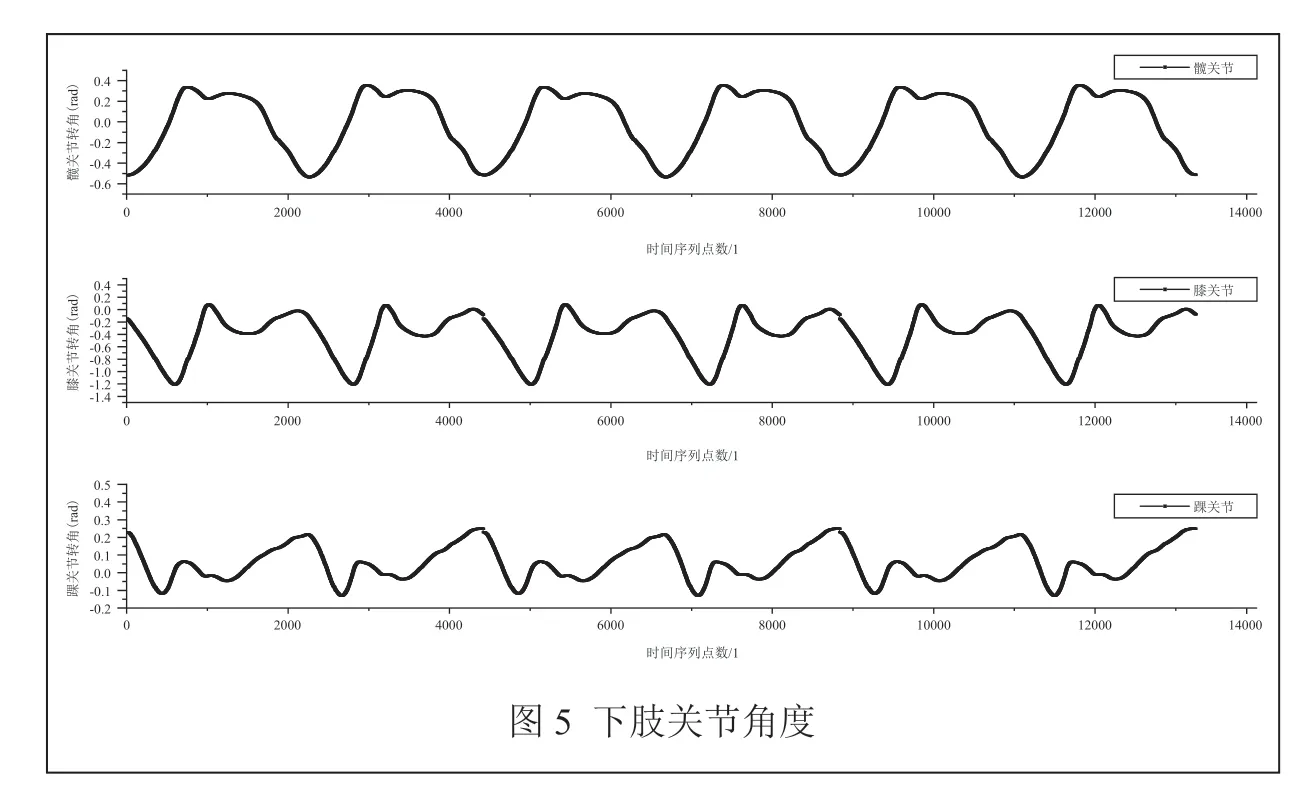
采用維特智能藍牙姿勢傳感器BWT901BLC 對人體實時姿勢進行采集,采集得到的實際關節角度如圖5 所示。
采用MATLAB R2019b 進行仿真實驗研究。將采集到的股直肌、股外側肌、股內側肌和股中間肌肌電信號的特征值作為輸入信號,輸出信號為關節角度。基于2 種信號進行遺傳算法優化的BP 神經網絡仿真,并與傳統的BP 神經網絡模型預測效果進行分析與對比。實驗結果如圖6 所示。
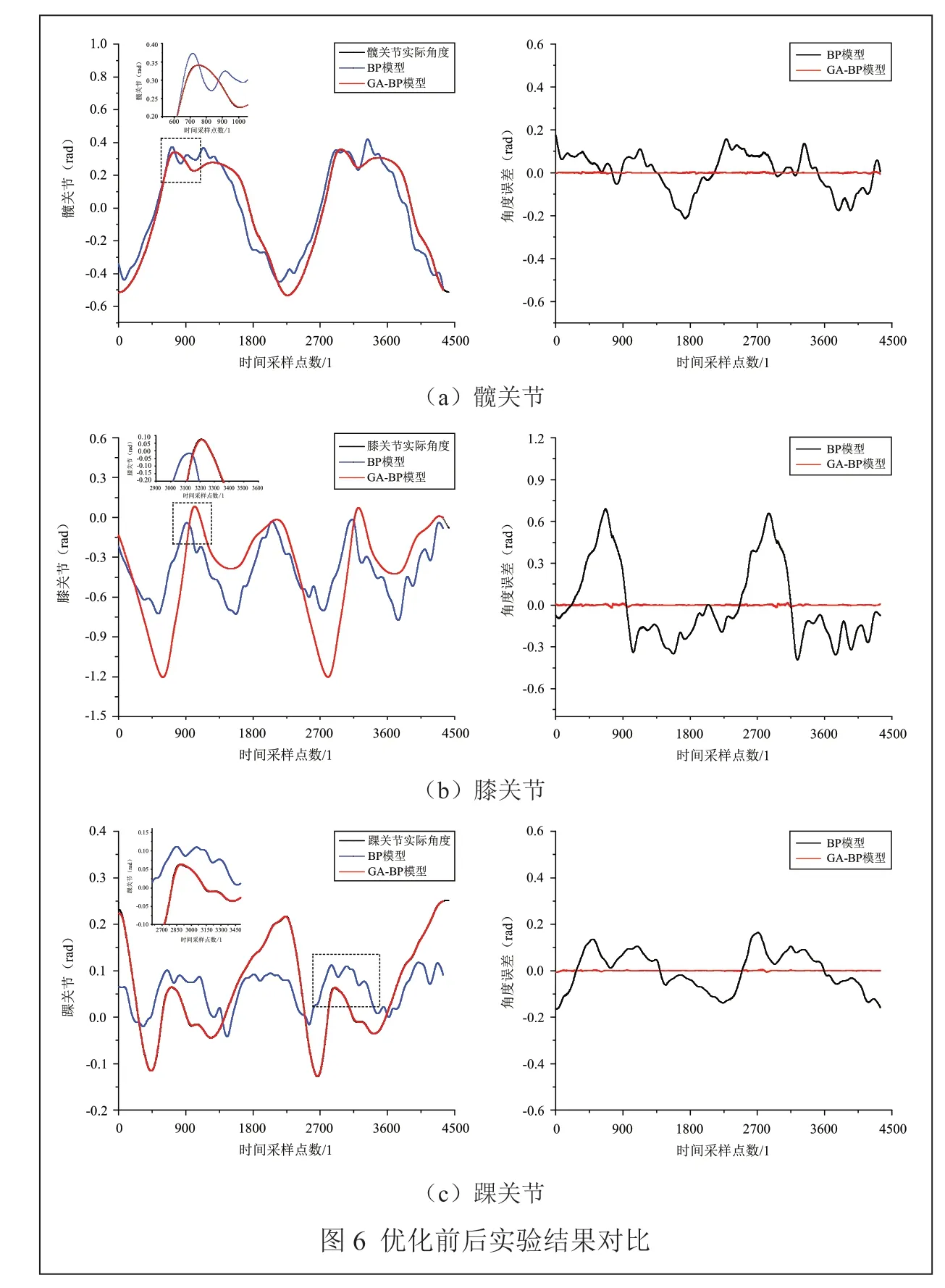
可以看出,使用傳統的BP 神經網絡預測髖關節角度最大誤差達到12°,膝關節最大誤差達到38°,踝關節最大誤差達到9°;而使用遺傳算法優化的BP 神經網絡進行預測,髖、膝、踝關節最大誤差都在1°左右。
4 結束語
通過本文研究,結果表明,使用遺傳算法優化的BP 神經網絡對于關節角度的預測精度有很大提升,且相對于傳統的BP 神經網絡預測結果也更為穩定。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
