高精度艦載光電跟蹤伺服調速系統的研制
2023-08-21 08:44:20楊國文
科技創新與應用 2023年23期
劉 濤,李 樂,楊國文
(中國電子科技集團公司第二十七研究所,鄭州 450047)
光電跟蹤系統是一個集圖像采集處理、伺服控制以及精密機械于一體的復雜設備。高精度光電引導系統要求伺服平臺具有控制精度高、系統響應快和抗擾動能力強等特點。三環控制系統中,速度環是實現伺服系統性能的部件。伺服系統的最大速度,最大加速度性能指標能否實現,取決于速度環的性能。調速范圍也是速度環的一個重要指標,只有速度系統有寬廣的調速范圍,伺服系統才有從高速到低速的平穩運轉,伺服系統的低速跟蹤性能也取決于速度環的調速范圍[1-2]。
因此,設計一個高精度、快速伺服系統,必須設計一個性能優良的速度環路。
1 伺服控制系統框圖
控制系統應該包括給定環節、比較器、控制器、執行機構、被控對象和反饋環節,系統結構框圖如圖1所示[3]。

圖1 伺服控制系統的基本構成
2 雙閉環調速系統的仿真
根據伺服控制系統的基本構成,可以畫出雙閉環調速系統的動態結構框圖如圖2 所示。
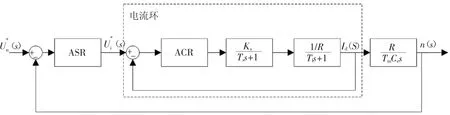
圖2 雙閉環調速系統的動態結構圖
圖2 中各參數的意義:ASR 為速度環調節器,ACR為電流環調節器,KS為晶閘管放大系數,TS為晶閘管失控時間,Tl為電樞回路時間常數,Tm為機電時間常數,Ce為電動勢轉速比。
本文主要研究速度環路的控制規律和設計方法,為了簡化系統,將電流環與電機看作一個整體處理,如圖2 中虛線框所示。一般多按Ⅰ型系統來設計電流環,電流環的控制對象是一個雙慣性單元,為將系統校正成Ⅰ型系統,應采用PI 調節器,其傳遞函數可以寫成
式中:Ki為電流調節器的比例系數;τi為電流調節器的時間常數。
當選取τi=Tl時,調節器的零點對消掉控制對象的大時間常數極點,此時系統被校正為Ⅰ型系統。閉環后,其傳遞函數可以近似處理為
上式可以得出,電流環閉環后,可以將其等效為一個小時間常數的一階慣性系統。
1.1 連續伺服系統仿真
傳統的模擬速度環可以看作一個連續系統,經過上文等效處理后,原調速系統可以簡化為圖3。

圖3 調速系統的等效動態結構圖
通常速度環應該校正為Ⅱ型系統,由圖3 可知,速度環控制的系統包含一個慣性環節和一個積分環節。因此,ASR 應選擇PI 調節器
式中:Kn為轉速調節器的比例系數;τn為轉速調節器的時間常數。
調節器參數的取值,需要根據系統對于動態性能的要求來決定。
2.2 離散伺服系統仿真
本文所設計的數字速度環,其給定環節、控制環節和反饋環節均為數字信號,故系統可看作一個離散系統。系統框圖如圖4 所示。
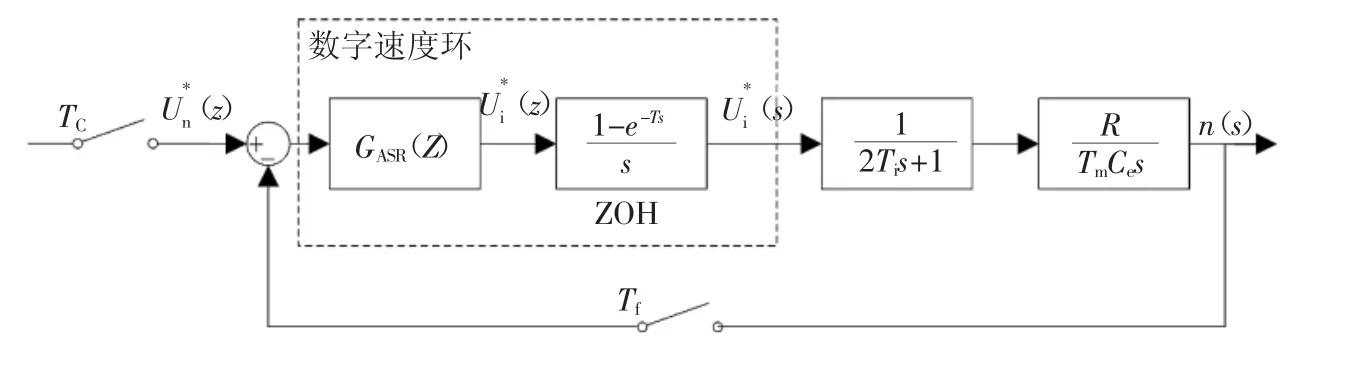
圖4 離散調速系統的動態結構圖
圖4 中Tc為指令給定的時間周期,Tf為速度反饋信號的采樣周期,T 為數字速度環的控制周期,GASR(Z)為GASR(S)傳遞函數的離散化。
取Tc=0.02 s,T=0.005 s,指令給定為幅值為5 的階躍信號,Tf分別取0.005 s 和0.000 5 s 進行仿真,并與連續系統仿真結果進行對比。結果如圖5 和6 所示。

圖5 Tc=0.005 s 時系統控制效果對比
當采樣周期較長時,離散系統的控制效果明顯差于連續系統,而當采樣周期足夠短時,由圖6 分析可知,離散系統超調量略大于連續系統,二者控制效果相似。

圖6 T=0.000 5 s 時系統控制效果對比
取Tf=0.000 5 s,調節器采用帶積分限幅的PI 控制算法時,仿真結果如圖7 所示。

圖7 采用積分限幅系統控制效果對比
對比可知,采用了積分限幅PI 控制算法后,離散調速系統的超調量和調節時間明顯優于傳統的連續調速系統。
3 數字速度環設計
本文所設計的伺服控制系統:給定環節為上位機發送數字命令;控制器選用FPGA 芯片進行PI 控制及接口控制[4],數模轉換器采用高精度D/A 轉換芯片;被控對象為高精度伺服轉臺;反饋環節為高精度數字光纖陀螺儀。系統結構框圖如圖8 所示。
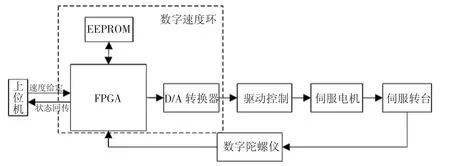
圖8 伺服控制系統結構框圖
3.1 硬件設計
本系統所采用的FPGA 芯片為ALTERA 公司生產的Cyclone Ⅳ系列,該系列芯片特點有低功耗,豐富的邏輯單元和片上存儲空間,多達56 個內置乘法器和81 個用戶I/O 引腳。可以滿足高精度伺服系統的控制要求,并且具有很好的擴展性。
D/A 轉換器則采用了AD 公司的AD7836 芯片,該芯片集成了4 個14 位DAC,采用±5 V 基準電壓,輸出電壓滿量程范圍為±10 V。接收到新數據時,DAC 輸出會獨立更新。
EEPROM 芯片采用了Microchip 的24LC04,用于存儲PI 控制器的控制參數,同時便于在線通過串口修改PI 參數。
3.2 軟件設計
根據系統所需要實現的功能,設計出FPGA 原理圖,其結構如圖9 所示。首先編寫出串口數據接收模塊,再根據速度環與上位機的協議、數字陀螺儀的協議分別解算出速度給定和當前轉臺速度反饋并發送給PI控制算法模塊,PI 模塊根據速度給定和反饋采用帶積分限幅的分段積分PI 控制,將計算出的電壓值通過D/A 控制模塊發送給AD7836 進行數模轉換,得到的模擬電壓作為速度環輸出[5-6]。

圖9 FPGA 原理圖
4 實驗結果
以本文所設計的數字調速系統控制高精度光電跟蹤伺服平臺,選取合適的比例和積分控制參數,由上位機發送速度值為50°/s 的階躍信號,使伺服轉臺由靜止狀態快速達到目標速度并且保持穩態,實驗所得數據如圖10 所示。

圖10 高精度伺服平臺階躍響應
圖10 中縱坐標為轉臺轉速,橫坐標為陀螺反饋數據幀數,每一幀發送周期為0.005 s。分析可得
調節時間:ts=10.5 ms。
通過實驗數據可以得出,本文設計的數字調速系統具有低超調和響應迅速的優點。系統達到穩態值后,閉環精度高達0.56%,控制性能相較于模擬調速系統有較大提升,可以滿足高精度光電跟蹤系統的控制要求。
5 結束語
本文從雙閉環調速系統入手,建立了連續和離散系統的數學模型,并進行仿真分析。在此基礎上,設計了基于FPGA 芯片和D/A 轉換器的數字調速系統。在控制方法上采用了帶積分限幅的分段積分PI 控制,實驗證明控制效果優良。該系統已經運用于某型號艦載起降綜合電視監視系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17