基于嵌入式的光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)設(shè)計(jì)及應(yīng)用效果分析
2023-08-21 08:44:04譚建斌
科技創(chuàng)新與應(yīng)用 2023年23期
譚建斌
(佛山職業(yè)技術(shù)學(xué)院 電子信息學(xué)院,廣東 佛山 528137)
基于太陽運(yùn)行軌跡的自動(dòng)跟蹤控制系統(tǒng),能夠通過實(shí)時(shí)數(shù)據(jù)采集及計(jì)算運(yùn)行,得出太陽方位角及高度角曲線,并將二者與仿真曲線進(jìn)行對(duì)比分析,可知實(shí)踐模型與理論模型在一定程度上達(dá)到契合,因此嵌入式光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)具有一定的穩(wěn)定性,可進(jìn)行推廣應(yīng)用。
1 嵌入式光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)設(shè)計(jì)
1.1 自動(dòng)跟蹤控制系統(tǒng)硬件設(shè)計(jì)
1.1.1 核心控制模塊設(shè)計(jì)
本文在進(jìn)行自動(dòng)跟蹤控制系統(tǒng)硬件設(shè)計(jì)時(shí),為了考慮使用性能及可操作性,核心處理芯片選取了32 位ARM7TDMI-S 微控制器LPC2138,該核心處理芯片進(jìn)行指令及譯碼過程比較簡單,方便后續(xù)模塊設(shè)計(jì),核心控制模塊的具體設(shè)計(jì)流程如下。
1)核心處理芯片的片內(nèi)存儲(chǔ)為32 KB,F(xiàn)lash 程序存儲(chǔ)器片內(nèi)存儲(chǔ)為512 KB,其接口的寬度設(shè)置為128 位。
2)核心控制模塊的下載路徑要求兼容在系統(tǒng)中編程(IAP)及在應(yīng)用中編程(ISP)2 種方式,在設(shè)計(jì)Flash編輯及擦除環(huán)節(jié)時(shí)要求反應(yīng)速度在0.5 s 內(nèi)。
3)在設(shè)計(jì)嵌入式跟蹤接口時(shí),要進(jìn)行執(zhí)行代碼編寫,使其具備實(shí)時(shí)調(diào)試及高速跟蹤功能。
4)系統(tǒng)要設(shè)計(jì)出2 路UART、2 個(gè)運(yùn)行速度較快的I2C 接口,同時(shí)配備SPI 及SSP 等串聯(lián)接口。
5)核心控制模塊要能滿足隨時(shí)更新擴(kuò)容的要求,因此通用接口I/O 要達(dá)到47 個(gè)以上,而且電壓設(shè)置要達(dá)到5 V。
6)核心控制模塊在掉電或者不做功模式下,要設(shè)置出低耗電模式,如果存在意外掉電,進(jìn)行外部中斷后要能夠喚醒,在進(jìn)行單電源供電時(shí),將CPU 的電壓設(shè)置在3.0~3.6 V。
7)核心控制模塊的模擬輸出要設(shè)置出不同檔位,通過2 個(gè)8 路A/D 轉(zhuǎn)換器及1 個(gè)D/A 轉(zhuǎn)換器可以滿足該要求。
1.1.2 電路設(shè)計(jì)
1)復(fù)位電路設(shè)計(jì)。復(fù)位電路設(shè)計(jì)需要配合核心處理芯片的性能,增加帶有I2C總線存儲(chǔ)器的電源監(jiān)控芯片CAT1025JI-30,該芯片具備低功耗特點(diǎn),能夠?qū)? K的串行EEPROM及掉電保護(hù)電源監(jiān)控電路壓縮到一個(gè)芯片內(nèi)[1]。同時(shí)設(shè)置復(fù)位鍵(RST)進(jìn)行復(fù)位信號(hào)的傳輸,CAT1025JI-30接收到信號(hào)后對(duì)I2C發(fā)出讀寫指令,此時(shí)對(duì)芯片SCL及SDA兩引腳設(shè)計(jì)連接到相應(yīng)的接口,并在I2C電路上設(shè)計(jì)2個(gè)上拉電阻,具體復(fù)位電路設(shè)計(jì)如圖1所示。
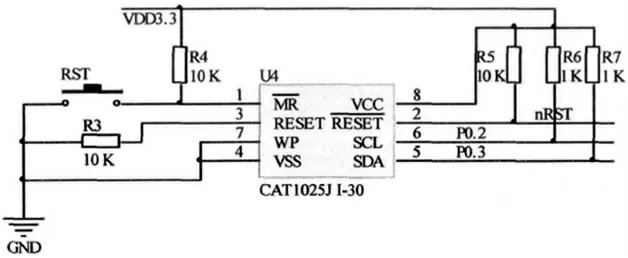
圖1 復(fù)位電路設(shè)計(jì)圖
2)晶振電路設(shè)計(jì)。本設(shè)計(jì)主要采用外部晶振,結(jié)合核心處理芯片設(shè)計(jì)要求,晶振采用11.0592MHZ 的型號(hào),并將其放置在微控制器LPC2138 的2 個(gè)時(shí)鐘引腳之間(XTAL1、XTAL2)。晶振電路設(shè)計(jì)要求接地,采用30 pF 的電容C1 及C2 在兩端處進(jìn)行接地連接,具體設(shè)計(jì)如圖2 所示。
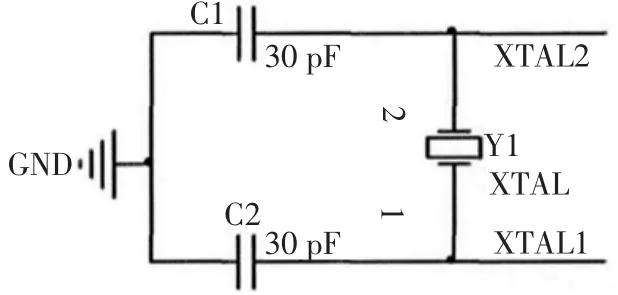
圖2 晶振電路原理圖
1.1.3 電源模塊設(shè)計(jì)
電源模塊為整個(gè)硬件系統(tǒng)提供動(dòng)能,其設(shè)計(jì)要包含:輸出電流、電壓、功率、輸入電壓、電流、輸出紋波、電磁兼容及電磁干擾、體積限制及功耗限制、成本限制和安全因素。本設(shè)計(jì)中微控制器LPC2138 耗能較低,可以與I/O 設(shè)計(jì)連接一個(gè)電源,并采用3.3 V 單電源進(jìn)行供電,結(jié)合市面上的電源型號(hào),較為理想的為LDP芯片SPX1117M3-3.3,該芯片在輸出電流上能夠達(dá)到800 mA,而且輸出電壓的精度能夠控制在±1%以內(nèi),在運(yùn)行過程中能夠?qū)ο到y(tǒng)進(jìn)行電流限制及過熱保護(hù)[2]。電源連接的電路需要設(shè)計(jì)為5 V,并采用外部供電,設(shè)計(jì)瞬態(tài)電流限制功能時(shí)采用電感L1 來執(zhí)行,并配合電容C3 及C4 來達(dá)到濾波的目的。
1.1.4 通信接口設(shè)計(jì)
嵌入式光伏發(fā)電工程中應(yīng)用的自動(dòng)跟蹤控制器的通信接口需要在每一個(gè)節(jié)點(diǎn)上設(shè)計(jì)電路,采用DC-DC電路即可滿足要求。通信接口設(shè)計(jì)采用RSM485 型號(hào)的芯片,核心模塊中微控制器LPC2138 型號(hào)具有2 路UART,因此與之連接的RSM485 也要設(shè)計(jì)2 個(gè),分別用UART0 和UART1 來表示,前者實(shí)現(xiàn)了軸控制器及跟蹤控制器之間的通信,后者實(shí)現(xiàn)了跟蹤控制器及監(jiān)控上位機(jī)之間的通信。配合RSM485 芯片設(shè)計(jì)還需配置一個(gè)專門的I/O 接口,負(fù)責(zé)控制訪問,I/O 與UART0連接的接口為P0.31,I/O 與UART1 連接的接口為P0.10,通信接口具體設(shè)計(jì)如圖3 所示。
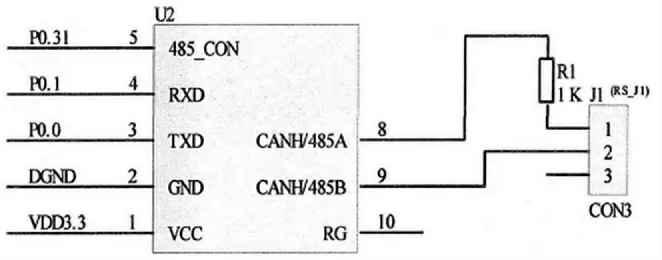
圖3 RSM485 通信電路設(shè)計(jì)圖
1.1.5 調(diào)試接口設(shè)計(jì)
自動(dòng)跟蹤控制系統(tǒng)需要在使用前進(jìn)行調(diào)試及試運(yùn)行,為了滿足軟件系統(tǒng)調(diào)試要求,在硬件設(shè)計(jì)環(huán)節(jié)要安裝一個(gè)調(diào)試接口。接口選擇要考慮核心微控制器LPC2138的兼容性,本設(shè)計(jì)選用了20 腳JTAG 仿真調(diào)試接口電路,具備嵌入式調(diào)試功能,其接口連接4 條線路:TMS 線路設(shè)計(jì)為測(cè)試模式選擇、TCK 線路設(shè)計(jì)為測(cè)試時(shí)鐘、TDI線路設(shè)計(jì)為測(cè)試數(shù)據(jù)輸入和TDO 線路設(shè)計(jì)為測(cè)試數(shù)據(jù)輸出,通過以上程序進(jìn)行接口調(diào)試操作,如圖4 所示。

圖4 JTAG 接口電路設(shè)計(jì)圖
1.2 自動(dòng)跟蹤控制系統(tǒng)軟件設(shè)計(jì)
1.2.1 跟蹤控制任務(wù)主程序設(shè)計(jì)
跟蹤控制任務(wù)主程序設(shè)計(jì)主要是在軸控制器與計(jì)算機(jī)之間進(jìn)行信息傳輸、指令下達(dá)及任務(wù)執(zhí)行,具體的設(shè)計(jì)流程如下。
1)系統(tǒng)初始化。設(shè)計(jì)時(shí)需要按照順序進(jìn)行引腳功能、串口的初始化,并進(jìn)行串口模式的設(shè)置,接著進(jìn)行I2C 的初始化設(shè)置及I2C 模式設(shè)置,再有需要設(shè)置PCF8563 的時(shí)間初始化設(shè)置。
2)跟蹤條件判定。跟蹤條件判定需要滿足2 個(gè)要求,先計(jì)算出實(shí)時(shí)的太陽高度角及方位角,將數(shù)據(jù)代入函數(shù)pcf8563GetTime(),運(yùn)用I2C 讀取數(shù)據(jù),看太陽高度角是否大于等于20°,再結(jié)合實(shí)時(shí)風(fēng)速值,看是否小于20 m/s,如果同時(shí)滿足以上2 個(gè)條件,可以判定為正常跟蹤模式,如果沒有同時(shí)滿足以上2 個(gè)條件需要進(jìn)入跟蹤保護(hù)模式。
3)正常跟蹤程序。在第2)步判定為正常跟蹤模式后,系統(tǒng)需要設(shè)計(jì)太陽高度角及方位角的跟蹤功能,本設(shè)計(jì)中采用EleAngelTrack()及AziAngelTrack()2 個(gè)函數(shù)實(shí)現(xiàn)跟蹤控制函數(shù)的設(shè)計(jì),程序進(jìn)入設(shè)計(jì)階段時(shí)應(yīng)用串口UART0 來讀取軸控制器上的太陽高度角及方位角。
方位角正常跟蹤。其中方位角跟蹤器設(shè)計(jì)時(shí)要配置增量式光電編碼器,并對(duì)編碼器進(jìn)行軟件四分頻,將每度對(duì)應(yīng)的脈沖值設(shè)置為4 096/360,此時(shí)需要計(jì)算組件實(shí)際方位角與實(shí)時(shí)方位角的差值脈沖,計(jì)算公式如下
根據(jù)式(1)計(jì)算得出的角度差脈沖如果大于11,需要檢查RS485 總線下的電機(jī)狀態(tài)是否為正行程限位,如果沒有處于該狀態(tài)需要重新計(jì)算跟蹤指令;如果式(1)中計(jì)算得出的角度差脈沖小于-11,需要檢查RS485 總線下的電機(jī)狀態(tài)是否為負(fù)限位,如果為負(fù)限位則表示電機(jī)狀態(tài)正常,能夠進(jìn)行方位角的跟蹤控制[3]。
高度角正常跟蹤。該環(huán)節(jié)采用絕對(duì)式角度傳感器進(jìn)行測(cè)量,計(jì)算高度角高度差時(shí),運(yùn)用組件實(shí)際高度-實(shí)時(shí)高度角公式,如果差值的絕對(duì)值大于1°,而且電機(jī)狀態(tài)正常,則表示能夠滿足高度角的跟蹤控制。
4)跟蹤保護(hù)程序。在第2)步判定為跟蹤保護(hù)模式后,將軟件系統(tǒng)設(shè)置為保護(hù)程序,并進(jìn)一步細(xì)化保護(hù)程序?yàn)橐雇矸牌奖Wo(hù)及避風(fēng)保護(hù)后,如果太陽高度角小于20°,計(jì)算機(jī)下達(dá)指令,控制發(fā)電機(jī)的轉(zhuǎn)速,減緩轉(zhuǎn)速后進(jìn)入夜晚放平保護(hù)模式。如果風(fēng)速大于等于20 m/s,計(jì)算機(jī)發(fā)出指令控制驅(qū)動(dòng)電機(jī),放緩電機(jī)轉(zhuǎn)速后進(jìn)入避風(fēng)保護(hù)模式。
1.2.2 跟蹤控制器通信程序設(shè)計(jì)
軟件系統(tǒng)中RS485 總線負(fù)責(zé)軸控制器及跟蹤控制器、跟蹤控制器及監(jiān)控上位機(jī)之間的通信,通信過程要求數(shù)據(jù)傳輸遵循相應(yīng)的通信協(xié)議,本設(shè)計(jì)采用Modbus 協(xié)議,后續(xù)設(shè)計(jì)環(huán)節(jié)中各種控制器使用的公共語言必須遵守該協(xié)議,并要將設(shè)備節(jié)點(diǎn)地址也轉(zhuǎn)換為Modbus 設(shè)備地址。Modbus 協(xié)議運(yùn)行過程中會(huì)應(yīng)用到ASCⅡ及RTU 兩種傳輸模式,第一種模式傳輸1 個(gè)數(shù)據(jù)幀中的1 個(gè)字節(jié),要應(yīng)用2 個(gè)ASCⅡ字符來實(shí)現(xiàn);第二種模式進(jìn)行相同字節(jié)的傳輸則只需要2 個(gè)16 進(jìn)制字符,因此在實(shí)際設(shè)計(jì)時(shí)要選用RTU 模式完成主機(jī)和相關(guān)設(shè)備之間的通信[4]。
2 嵌入式的光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)應(yīng)用 效果
2.1 調(diào)試軟件設(shè)計(jì)
試運(yùn)行前的調(diào)試需要檢測(cè)系統(tǒng)的運(yùn)行狀態(tài),采用串行通信方式進(jìn)行數(shù)據(jù)采集,并將數(shù)據(jù)傳送至計(jì)算機(jī),設(shè)置可視化設(shè)備后可以實(shí)時(shí)觀測(cè)數(shù)據(jù),并將數(shù)據(jù)及時(shí)存入關(guān)系數(shù)據(jù)庫。本項(xiàng)目中運(yùn)用Basic 語言來設(shè)計(jì)上位機(jī)調(diào)試軟件,首先應(yīng)用可視化程序設(shè)計(jì)語言(Visual Basic)進(jìn)行編程,該過程依據(jù)事件驅(qū)動(dòng)機(jī)制,程序設(shè)計(jì)要具備跟蹤器通信功能,以及風(fēng)速、風(fēng)向、高度角和方位角的運(yùn)行狀態(tài)的實(shí)時(shí)跟蹤功能,并將以上功能設(shè)計(jì)出相應(yīng)的顯示界面[5]。實(shí)際操作時(shí)需要上位機(jī)讀取串口UART1 的信息,并通過RS485 總線反饋至上位機(jī),期間獲取的數(shù)據(jù)需要運(yùn)用Microsoft Access 連接到數(shù)據(jù)庫中:
cnn.Open"provider=microsoft.jet.oledb.4.0;data source= database.mdb;persist security info=false;"
rsl.CursorLocation=adUseClient
rsl.Open"selsct*from ARM1",cnn,ad OpenDynamic,adLockPessimistic...
上位機(jī)調(diào)試軟件的編程設(shè)計(jì)屬于計(jì)算機(jī)頂層的軟件監(jiān)控設(shè)計(jì),此種設(shè)計(jì)能夠連接多個(gè)跟蹤控制器,相應(yīng)的控制器需要賦予唯一的地址編碼,以便后續(xù)跟蹤識(shí)別,而且每個(gè)跟蹤控制器在數(shù)據(jù)庫中都有唯一一個(gè)表相對(duì)應(yīng)。
2.2 工程應(yīng)用
本文設(shè)計(jì)的嵌入式光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)實(shí)際運(yùn)行時(shí)應(yīng)用于10 MW 光伏并網(wǎng)電站,實(shí)際應(yīng)用所采用的具體技術(shù)參數(shù)見表1。

表1 某光伏并網(wǎng)電站跟蹤控制系統(tǒng)器主要技術(shù)參數(shù)
考慮周圍環(huán)境及惡劣氣候條件,需要將跟蹤控制系統(tǒng)模塊及電氣控制模塊放置在具有特殊功能的電氣柜中,保證電氣柜的各個(gè)功能器件連接到主機(jī)部分。
2.3 應(yīng)用結(jié)果分析
選取12:50—13:50 時(shí)間段的太陽方位角與跟蹤器組間方位角的數(shù)據(jù)進(jìn)行對(duì)比分析(圖5(a)),并選取12:00—13:00 時(shí)間段的太陽高度角與跟蹤器組間高度角的數(shù)據(jù)進(jìn)行對(duì)比分析(圖5(b))。

圖5 跟蹤曲線圖
結(jié)合圖5 可知,在選取的跟蹤時(shí)間段內(nèi),跟蹤取得的數(shù)據(jù)曲線中圖5(a)方位角曲線變化及趨勢(shì)與仿真曲線相近似,角度差曲線與太陽位置曲線趨于重合,達(dá)到了預(yù)期要求。而圖5(b)的高度角跟蹤曲線的變化范圍及趨勢(shì)與仿真曲線存在偏差,分析現(xiàn)場(chǎng)運(yùn)行環(huán)境可知,跟蹤系統(tǒng)在風(fēng)力較大的情況下,組件會(huì)發(fā)生晃動(dòng)的情況,使得高度角測(cè)量存在誤差,為了提升運(yùn)行效果,可以在風(fēng)速較小的情況下,采用多次測(cè)量計(jì)算得出平均值的方法來降低誤差。
3 結(jié)束語
光伏發(fā)電優(yōu)勢(shì)較為明顯,不僅儲(chǔ)量豐富,而且應(yīng)用范圍廣泛,通過嵌入式光伏發(fā)電自動(dòng)跟蹤控制系統(tǒng)的應(yīng)用,實(shí)現(xiàn)了將太陽能轉(zhuǎn)換成電能,進(jìn)一步解決了能源緊張的問題。跟蹤系統(tǒng)操作方便、結(jié)構(gòu)簡單,降低了工程成本,是電能行業(yè)未來應(yīng)用的主要趨勢(shì)。
猜你喜歡
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
電子制作(2018年12期)2018-08-01 00:47:44
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:23
制造技術(shù)與機(jī)床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32
當(dāng)代化工研究(2016年6期)2016-03-20 16:21:46
沈陽醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
單片機(jī)與嵌入式系統(tǒng)應(yīng)用(2014年9期)2014-03-11 15:35:13