共享單車用戶出行目的地預測與分流技術研究
2023-08-19 03:46:40董慧
黑龍江科學 2023年14期
董 慧
(安徽工業經濟職業技術學院 國有資產管理處,合肥 230051)
共享單車的推廣符合綠色低碳出行發展要求,能夠提升出行便利程度、緩解交通壓力,在實際應用環節需配合不同城市的交通情況構建出行目的地預測模型,在設置流量變化、車輛數量及閾值等參數的基礎上精準預測出行目的地。
本研究在分析用戶出行規律及時空范圍內交通情況的基礎上,采用深度學習預測模型DPNNst進行目的地預測,以達到整合交通資源、降低出行成本的目的,有助于實現共享發展的目標。
1 共享單車用戶出行目的地預測模型建立
預測共享單車出行目的地,需先對用戶歷史騎行軌跡及地理位置關系、用戶行為序列時間關系、天氣事件等外部因素進行綜合計算考量。深度學習預測模型DPNNst綜合了卷積神經網絡、長短期記憶網絡、全連接神經網絡等多種神經網絡,在實踐應用環節能夠準確對共享單車用戶出行目的地進行預測[1]。本研究將目的地預測要素分為用戶與候選地進行二分類建模預測,根據預測結果,候選地中的位置是目的地則分類為1,否則為0。本研究設計的預測模型整體網絡架構有3個層次,分別為用戶行為序列、空間地理位置、外部特征,每部分具體建模流程如下。
1.1 用戶行為序列
采集用戶的歷史行為信息,并將其按照時間排序,構成行為序列,進一步組成向量,輸入多層長短期記憶網絡,利用LSTM系統訓練網絡,幫助模型快速掌握用戶歷史行為規律,最終做出行為預測。
統計用戶起始點到目的地間的模式計數,按照時間順序生成行為序列,見圖1。
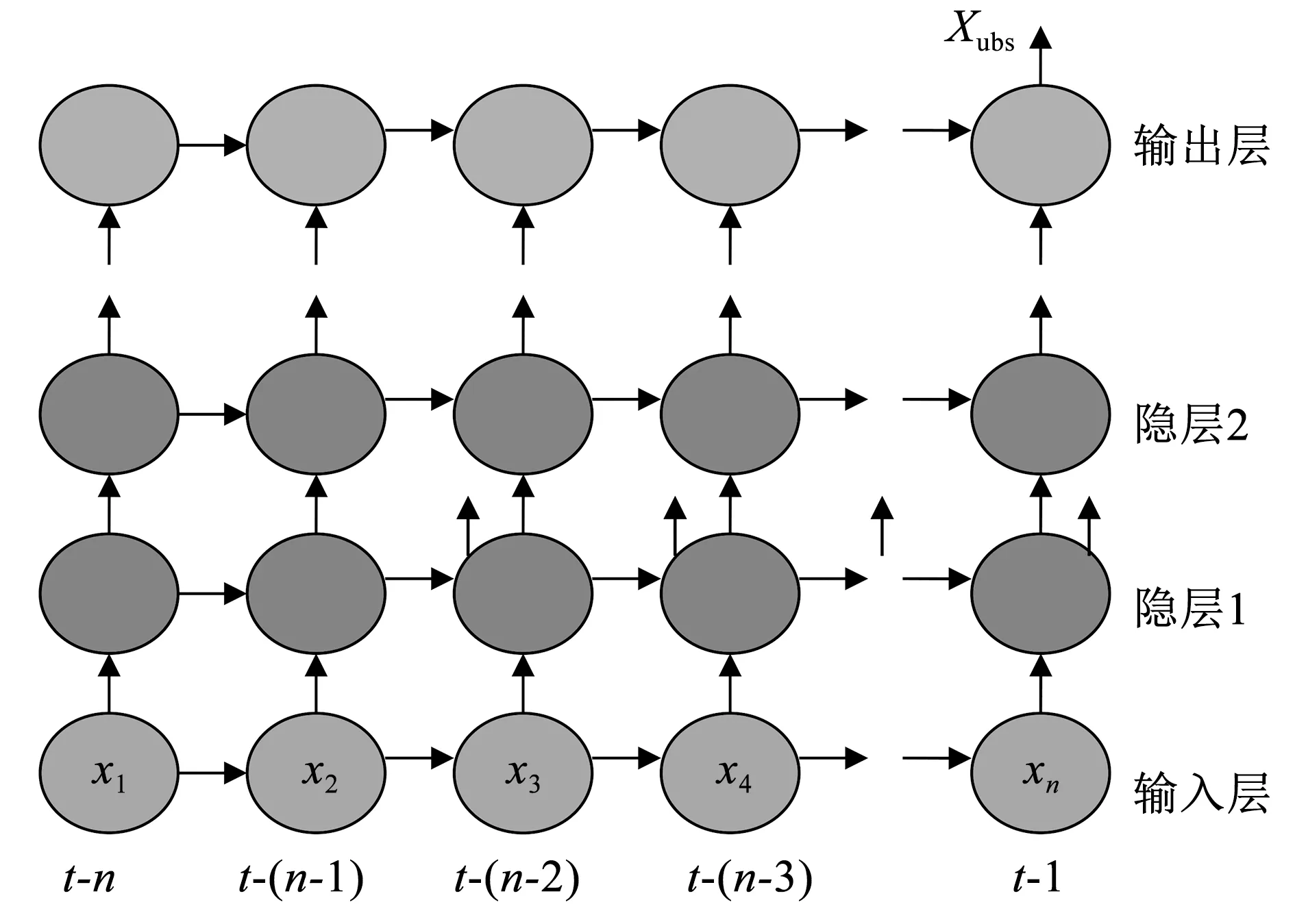
圖1 用戶行為序列數據Fig.1 Data of users’ behavior sequence
設當前時刻為t時刻、時間窗口為n,序列范圍設計為從t-n到t-1,并將其記為[xt-n,xt-(t-1), …,xt-2,xt-1],該序列值表示用戶在起始點到目的地之間的騎行次數,此環節如未發生記錄,則記為0。
選擇定長序列長度,幫助模型分析用戶騎行的周期性規律。如訓練數據不夠充足,也可選擇變長序列進行訓練,將輸入向量設為Xu={x1,x2,…xn-1}。
提取LSTM訓練中的第t個輸入值,計算其對應的遺忘門f、輸入門i、輸出門o,得出:
ft=σ(Wf[ht-1,xt]+bf)
it=σ(Wi[ht-1,xt]+bi)
ot=σ(Wo[ht-1,xt]+bo)
ht=ot*tanh(Ct)
(1)
(2)
1.2 空間地理位置
繪制矩陣圖分析用戶空間地理位置的變化情況,將位置關系以圖片形式傳輸到多層卷積神經網絡,在此神經網絡中實現訓練后傳輸到多層全連接網絡,分析起始地點與目的地的對應關系,計算可能性概率。要注意在時間維度外,還有空間維度,將時空關系映射到二維平面也需構建矩陣,如圖2所示,將此矩陣視作表示點與點之間關系,即表示不同地理位置關系的圖。
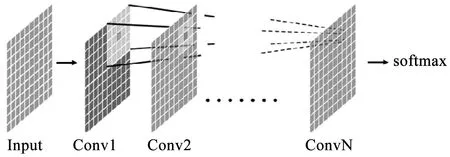
圖2 地理空間位置關系卷積過程Fig.2 Convolution process of geographical spatial position relation
通過卷積神經網絡,在圖2中標記出起始點與目的地,在此基礎上生成2通道(channel)的圖Xp={xstrart,xdest},其中Xp∈Rr*I*J*2,r表示圖的數量,I和J分布為圖的寬和高,在進行基層的卷積后,得出:
(3)

(4)
1.3 外部特征

1.4 網絡融合
融合三層結構網絡,使每個結構的最后一層都連接到全神經網絡中,在此部分進行交叉組合,用softmax分類函數對三層結構輸出的結果進行分類,得出目的地概率值,其中損失函數需使用交叉熵:
(5)
針對公式(5),使用Adam進行優化訓練,得出最終模型結果:
(6)
深度學習預測模型DPNNst的全過程算法見表1。

表1 目的地預測網絡算法Tab.1 Destination prediction network algorithm
2 實證分析
2.1 模型評價標準
采用F1值指標,計算參照公式(4),得出模型準確性公式:
(7)
公式(7)中的Precision表示準確率,Recall表示召回率,準確率的計算參照公式(5),召回率的計算參照公式(3),進一步得出:
(8)
公式(8)中TP值表示判定結果,值為正類,屬于正確的預測結果;值為負類,屬于錯誤的預測結果[3]。
2.2 實證結果
在實驗環節,采用Pythom庫函數進行建模,配合使用的編碼環境為:CPU版本1.2.1、CUDA 8.0.61、CUDNN版本8.0,運行環境為:處理器Intel i7,內存16GB、顯存8G Nvidia-GTX1070顯卡。
將LSTM訓練網絡中的10個隱層定義進行功能劃分,設置2層卷積層,內核的大小分別為5*5和10*10,Batch Size值設置在1000上下,Drop-out率設置為0.8。實際訓練操作環節采用多個epochs,不考慮設備及其他因素影響,對超參數進行適當調整后取最優結果,深度學習預測模型DPNNst的試驗模式與評判標準F1值的關系見圖3[4]。
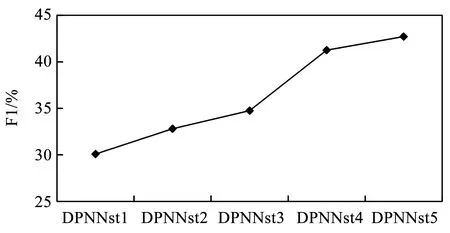
圖3 目的地預測模型在測試集上的結果Fig.3 Results of the destination prediction model on the test set
應用DPNNst模型時,只對用戶行為序列構成進行LSTMs訓練記為DPNNst1,F1值為30.10%。在此基礎上添加地理位置空間因素,記為DPNNst2,F1值為32.82%。在用戶行為序列及地理位置空間的基礎上添加外部特征因素,記為DPNNst3,F1值為34.75%。在DPNNst3的基礎上將FCs層數調整到5層,F1值達到41.26%。再將LSTM層數調整到5層,F1值達到42.71%。可見模型輸入因素越多,訓練層級越多,得出的預測結果就越準確。共享單車用戶出行行為具有一定的隨機性,導致車輛召回率較低,但在應用過程中該模型能夠較好地解決此類實際問題。
3 用戶分流技術策略
3.1 推薦還車地點

(9)
3.2 引導用戶輔助流量的平衡

(10)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
商用汽車(2016年11期)2016-12-19 01:20:16
光學精密工程(2016年6期)2016-11-07 09:07:19
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
核科學與工程(2015年4期)2015-09-26 11:59:03
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39