無人機遠程控制在油氣田行業的研究與應用
2023-08-10 02:08:53劉欣欣汪洋黃麗黃俊豪何樂
中國新通信 2023年11期
劉欣欣?汪洋?黃麗?黃俊豪?何樂
摘要:本論文主要研究無人機在管道巡檢中的應用,特別是自主飛行技術和無線通信模式下的遠程控制技術。該研究旨在探索一種新的無人機自主巡檢管道的管理模式,以降低部分區域管道人工巡檢頻率,提高巡檢的安全性及高效性,從而提高油氣田智能化管理水平,并降低含硫氣尤其是高含硫氣管道巡檢風險。
關鍵詞:管道巡檢;無人機自主飛行;遠程控制;汽油田智能化管理
一、現狀分析
氣礦前期已經對于“無人機+”應用模式開展了方式探索與經驗積累,目前采用的方式是飛手在現場執行飛行任務,同時視頻存儲,對部分管道進行應用實踐。針對生產現場提出的新要求需要利用無人機巡檢來實現實時視頻監測等功能,解決原應用模式存在操控不夠靈活、無法實時通信的問題。
二、解決方案
研究一套無人機遠程控制架構,利用遠程靈活控制和實時視頻回傳等功能,將其組成無人機遠控系統,實現“遠控無人機+”應用模式。該模式在無線通信覆蓋區域內,減少人工巡檢頻次,保障天然氣管道安全平穩運行。
三、主要研究內容
(一)確定研究方案
1.無人機遠程控制及通信組網模式研究
開展調控中心、片區兩級隨時觸發或介入無人機自主飛行模式,實時調看飛行任務過程中拍攝高清視頻等遠程控制功能的研究;比較選則5G、4G、微波等多種移動通信方式,制定適用于移動信號薄弱甚至盲區的生產現場的通信組網方案。
2.無人機自主開展片區巡檢應用研究
根據輸氣管道巡線的業務需求,包括管道周邊環境變化、第三方施工隱患識別、場站環境、甲烷泄漏監測等,開展對飛行參數設置、搭載設備選型及數據分析平臺功能開發的研究。在片區范圍內,實現管道無人機一體化自主巡檢。
(二)確立通信組網模式
采用兩種組網模式,可實現無縫切換:
4G/5G鏈路建設:無人機搭載4G/5G通信模塊,利用運營商網絡接入云服務器來實現通信。
微波鏈路模式:無人機搭載微波通訊模塊,利用微波基站與停機坪進行通訊,停機坪充當通訊中繼,實現通信鏈接。
這兩種模式可以相互切換,使得無人機的通信更加穩定可靠,提高無人機巡檢的效率及精度。
(三)確立無人機自主飛行軟硬件配置方案
1.硬件選型和適配
(1)無人機
①選用多旋翼無人機:以實現低空、精細化巡檢作業。
②配備2種通信模塊:4G和微波通訊模塊。
③掛載配置:可配置掛載重量3kg,目前配置高倍變焦攝像頭。
(2)機庫
①作為供電源:為無人機充電,為氣象站供電。
②作為通信樞紐:微波鏈路中轉站,為氣象站提供網絡。
③作為保護屏障:具備RTK+視覺引導技術,確保無人機精準降落;裝配煙感、溫度傳感器、水淹傳感器和斷路器,一旦檢測到異常情況,將采用斷電處理。溫濕度超標,會自動啟動空調降溫。
(3)氣象站
飛行條件判斷:通過地方氣象臺的數據與內設環境監測傳感器數據聯合監測風速、風向、雨淋、溫度、濕度和光照。
(4)工作環境檢查標準:
①工作風速:0m/s-12m/s(0-6級)。
②工作溫度:-20℃-60℃。
③工作濕度:10%-90%(無凝結)。
④電磁干擾:0-100A/m(工頻磁場)。
超出標準的范圍,無人機將無法起飛或需要臨時迫降。
2.軟件功能設計
機組精細管理、預設飛行軌跡和制定飛行任務是實現無人機自主飛行的三個模塊。
(四)確立無人機遠程控制模式
采用兩種控制模式,可實現無縫切換。
常規巡檢模式:可遠程控制無人機的飛行,下達巡檢任務、一鍵起降、實時視頻回傳等功能。
應急接管模式:遇到緊急情況需要飛手直接介入,可通過手動搖桿對無人機進行實時接管。
四、現場應用成果
(一)在黃龍X井試驗成功
1.關鍵硬件選址
(1)無人機機庫及氣象站選址關鍵要素
①開闊地帶,周圍不能有大的信號干擾源影響GPS定位。②地面相對平整,位置相對高,水泥地基面積大于20平方米,氣象站距離停機坪5米。③具備220V電力接入條件。④具備網絡接入條件,上行帶寬50M,下行帶寬500M。
(2)微波中繼站選址
①以機庫位置為圓心,方圓5公里區域內制高點;如非區域最高點,能與機庫通視兩者海拔高差不超過30米。②無電磁干擾,避免影響通信信號。③附近具備220V電力接入條件。
2.部署方案
硬件部署方案:機庫及中繼站部署在黃龍X井,中繼站部署于場站周圍制高點,海拔約712米,供電源取自村委會,租賃運營商500M鏈路1條。
軟件部署方案:軟件平臺搭建于黃龍X井中心站及調控中心。
3.試驗效果
通過建設無人機機庫、氣象站、微波中繼站、遠控平臺等軟硬件,實現預設飛行、精準降落、自動充電等功能的上線,能夠自主實施半徑5公里范圍內的飛行任務。在中心井站和一百多公里外的調控中心,都能對巡航在井站、管道的無人機實時發布啟停指令并操控飛行。
(二)常規管道巡檢參數設置
飛行場景:地勢平緩區域管道、山地上坡區域管道、山地下坡區域。
巡檢關鍵要素:管道樁、管道標志牌、堡坎。
飛行參數:
①飛行速度。無人機飛行速度范圍為0-20米/秒,電池容量可供飛行時長為20分鐘。為應對天氣突變等應急情況,在無人機返程時需要保留50%電量,實際巡檢飛行時長為10分鐘。無人機的飛行速度越慢,呈現的視頻效果越佳。以黃金X段為例,巡檢管線長度為4.43km,無人機從起飛點至巡檢起始點直線距離約1.3公里,總的飛行里程為5.73公里。飛行航線的航點數為31個,平均每個航點處從剎車到轉彎后再次啟動的耗時為4秒,飛機總的航行耗時約為2分鐘。實際巡檢為8分鐘,故黃金X段的飛行速度為5730米/480秒,約為11.94米/秒。
②飛行高度。無人機的相對飛行高度范圍為0-300米,其中300米以上屬于民航使用空域,且在山區,氣流紊亂增大,不可控。機庫所在地黃龍X井的海拔高度約682米,以黃龍X井支線為例,巡檢范圍內的制高點海拔約767米,因此飛行高度至少要高于兩者高差85米。由于無人機在飛行時會因衛星顆數減少以及風速對飛機氣壓計的影響,導致飛行高度出現上下浮動的偏差。為確保飛行高度的絕對安全,飛機與制高點之間的相對高度應高于15米以上,以防在飛機定位誤差增大時,高度低于制高點的高度發生碰撞。綜合以上兩種因素,以及無人機自動調節飛行高度等技術原因,最低安全高度被設定為100米。同時,無人機飛行的高度越低,呈現的視頻效果越佳,畫質損失越小,地面物體看得越清晰。因此,飛行高度控制在100米時視頻效果最佳。
③變焦倍數與管道兩側可視距離。以五黃線X區域管道為例:飛行高度100米的情況下,變焦倍數為1倍,管道兩側的可視距離為左右各60米;飛行高度100米的情況下,變焦倍數為2倍,管道兩側的可視距離為左右各40米;飛行高度100米的情況下,變焦倍數為4倍,管道兩側的可視距離為左右各20米;飛行高度100米的情況下,變焦倍數為6倍,管道兩側的可視距離為左右各10米。為及時發現管道兩側的地質災害、施工、爆破等行為,避免管道出現不完整性,管道兩側的可視距離應保證在左右各50米。在飛行速度和高度不變的情況下,變焦倍數越大,物體離相機的距離就會看起來更近,畫面的相對運動越明顯,運動模糊程度越大,畫面的辨識度越低。因此,在選擇拍攝變焦倍數時,應優先選擇小的倍數,這樣更容易辨識拍攝畫面中的物體。? 綜上,在巡檢五黃線時,非應急情況下,在飛行相對高度100米的情況下,變焦倍數保持在1倍時效果最佳。
④拍攝角度。應用場景分為地勢平緩區域管道、山地上坡區域管道、山地下坡區域管道,拍攝鏡頭角度為30度、45度、60度、90度,并逐一進行試驗,得出以下結論。
a.針對地勢平緩區域管道(以黃金X段X村區域管道為例)
在地勢平緩區域,拍攝角度90度的二維平面效果明顯,管道左右兩側等距,左右視野清晰,不存在視覺盲區,但不容易分辨出標志牌及管樁的位置。60度、45度、30度的拍攝角度三維立體感明顯,更容易分辨出標志牌及管樁的位置,但管道視野呈倒置梯形結構(視野呈上寬下窄),近處管道清晰,遠處較模糊,對比無人機飛行位置,巡檢畫面整體前置,角度越小畫面前置位置越大,距離拍攝物越遠,畫面越廣,拍攝要素越模糊;若在管道正上方巡檢,由于畫面前置問題,在管道拐彎時容易出現視角盲區(即管道不在巡檢畫面中)。綜上,在管道日常巡檢時,地勢平緩區域,優先采用90度巡檢。
b.針對山地上坡區域管道(以黃龍X井集氣支線X區域管道為例)
在山地上坡區域,拍攝角度90度的二維平面效果明顯,管道左右兩側等距,左右視野清晰,不存在視覺盲區。60度、45度、30度的拍攝角度三維立體感明顯,對比無人機飛行位置,巡檢畫面整體前置,角度越小畫面前置位置越大,距離拍攝物越遠,畫面越廣,拍攝要素越模糊;如需拍攝到管道,無人機位置需向后調整(無人機位置不能在管道正上方);若在管道正上方巡檢,由于畫面前置問題,易出現視角盲區(即管道不在巡檢畫面中)。綜上,日常的管道巡檢時,山地上坡區域,優先采用90度巡檢。
c.針對山地下坡區域管道
山地下坡區域只能實現90度的管道影像攝取,30度、45度、60度均無法實現管道影像的有效攝取(存在視覺盲區,即管道無法呈現在巡檢畫面中)。綜上,日常的管道巡檢時,山地下坡區域,優先采用90度巡檢。
綜合以上不同環境的測試結果,發現在90度角度下拍攝,盲區最少,適用的場景最多。同時,在后期將三色管疊加到視頻上時,若飛行角度為90度,相機畫面中心點的坐標就是飛機坐標點,可以將畫面中心點的坐標與管線路徑坐標做比對,從而將管線走向疊加到相應畫面上。但如果采用其他角度拍攝,由于畫面中心點位置相對飛機位置有前后的位移,且畫面視角范圍上下不均等(視野呈倒置梯形結構,視野上寬下窄),導致無法得出畫面中心點的坐標,進而無法與管線路徑坐標做對比,最終無法實現管線的三色標注。綜上,在日常管線巡檢中,優先采用90度巡檢視頻效果最佳。
(三)應急情況下勘查參數設置
①飛行速度。由于應急勘察一般是對單獨的要素情況進行拍攝,不用按照固定航線飛行,因此可以根據實際應急情況的需要,飛行速度控制在0-20米/秒。
②飛行高度。滿足安全要求,在飛行途中,高度控制在100米以上(含100米)。到達目的位置后可根據實際環境降低飛行高度,但至少要大于飛機與機庫之間制高點15米的高度。
③變焦倍數。以黃金X段的標志物為例,設置變焦倍率為5倍、10倍、20倍、40倍,并逐一進行試驗,得出以下結論:綜合對比40倍時的圖片最清晰。根據實際應急情況的需求,變焦控制在1-40倍之間,變焦倍率越高,拍攝越清晰。
④角度。以黃金X段的標志物為例,設置拍攝鏡頭角度為30度、45度、60度、90度,并逐一進行試驗,得出以下結論:90度缺乏立體感,畫面較為平面。30度、45度、60度畫面有立體感,能更好地判斷出拍攝要素外貌,45度的畫面立體感最強,距離拍攝要素的距離也相對較近。綜上,應急巡檢時,優先采用45度巡檢。
綜上,應急勘察過程中,應該根據實際情況控制巡檢速度控制在0-20米/秒之間;飛行途中,必須將巡檢相對高度控制在100米以上(含100米),并根據現場實際環境情況適當降低飛行高度;至少要高于飛機與機庫之間制高點15米。變焦范圍應為1-40倍;選擇拍攝角度時,應優先選擇45度。這些措施的實施,將有助于獲得更清晰、可靠和具有實際應用價值的勘察數據,提高勘察的工作效率和準確性。
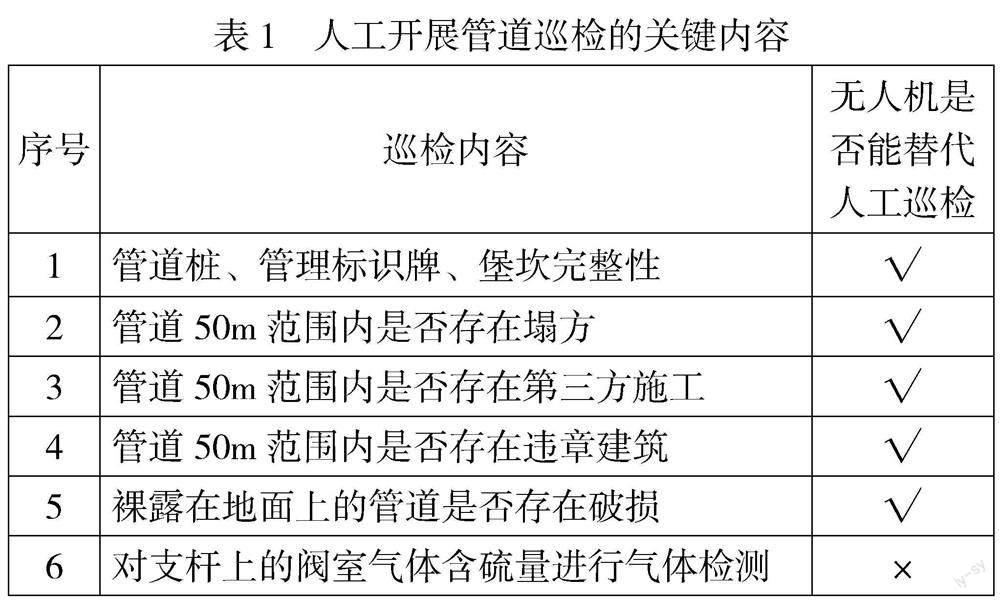
(四)與人工巡檢相比的替代率
經測算,無人機巡檢與人工巡檢相比,可替代率為83.33%。
五、結束語
無人機遠程控制在油氣田行業的研究與應用,主要實現以下成果:①突破實時通信瓶頸。通過移動通信和無線微波通信模塊適配測試18次,選用4G/5G鏈路與無線微波連接無縫切換的方式,解決山區信號較差的問題,確保無線信號覆蓋半徑可達10-30公里。②攻破遠控技術壁壘。進行無人機、通信基站、氣象探測器等硬件設施選型和適配,并開發和調測與實時視頻回傳、預設飛行軌跡、機組精細管理等軟件功能,融合形成一套完整的無人機遠程控制架構,實現片區和調控中心的兩級控制。③打破多元應用邊界。通過紅外高倍變焦攝像頭等無人機掛載調測,適配日常巡檢、應急處置等應用場景,使任務執行范圍可覆蓋片區內管道,實現多元應用。這些成果的實現,將為油氣田行業提供高效、精準、智能的巡檢和應急處理服務,提高生產效率和安全性。
作者單位:劉欣欣 汪洋 黃麗 黃俊豪 何樂
西南油氣田公司川東北氣礦
參? 考? 文? 獻
[1]于同陽,尹麗菊,胡浩東,等.基于移動網絡的多軸無人機遠程控制系統[J].自動化與儀表.2019(08).
[2]熊勇良,王庭喜,熊四華,等.5G無人機與遠程控制系統應用分析[J].工程技術研究.2020(23).
[3]高宏,于萍.無人機在應急通信中的應用前景[J].勞動保護.2022(04)
[4]付振江,羅俊松,寧進,等.無人機集群通信的應用現狀及展望[J].無線電工程.
[5]李培銘,周睿. 無人機通信專網在頻譜共享下的接入與干擾管理[J].現代信息科技.2021(18).
