蘋果采摘機器人機械手及控制系統設計
2023-08-07 09:21:02孫旖彤潘肖楠李明明雷達榮
科技創新與應用 2023年22期
關鍵詞:單片機
孫旖彤,潘肖楠,張 俊,李明明,雷達榮
(1.隴東學院,甘肅 慶陽 745000;2.長慶油田分公司第十一采油廠,甘肅 慶陽 745000;3.慶陽質量檢驗檢測研究院,甘肅 慶陽 745000)
我國蘋果的生產量巨大,一年的總產量大概有3 000 萬t。在整個蘋果產業生產中,采摘過程占全部所需勞動力的三分之一至二分之一。但是,目前大部分的蘋果采用的是人工采摘,采摘的效率非常低,而且耗費的勞動力比較大,在采摘的過程中還會遇到一些不可預知的危險。因此機械自動化采摘尤為重要。
針對市面上一些輔助機器易損傷、效率低的問題,本文研究的蘋果采摘機械手是一種自動化的水果采摘機械手,通過控制系統和機械結構的自動操作就可以完成采摘蘋果的工作,這樣大大提高了勞動效率,對促成蘋果產業的發展具有重要的運用價值。
1 機械手結構設計及相關計算
1.1 機械手爪對蘋果摘取的原理
蘋果采摘機器人經過多年的發展,其驅動部分主要有液壓、氣壓、電機驅動,而手指結構設計分為兩指和多指。本文中研究的機械手爪采取三指,利用電機進行驅動。
通過分析采摘機械手裝置的機械原理,本文采取電機控制剛性連桿帶動其運動的連桿驅動型手爪,其裝置主要由電機、絲杠、軸承等零件組成。
電機采用絲杠步進電機,絲杠與螺母結合,絲杠作為主動體,當絲杠轉動時,螺母就會隨之轉換為直線移動,螺母連接著支持連桿使其運動,最后帶動機械手抓取蘋果。
當機械臂到達蘋果的位置時,發出信號給控制系統,使其驅動步進電機進行正轉,帶動螺桿轉動使螺母上升,同時帶動連桿也上升,然后機械手握緊,抓住蘋果,而當機械臂到達放置蘋果的位置時,單片機驅動步進電機反轉,螺母下降,同時也伴隨著機械手張開,放置蘋果。而在機械手張開和握緊期間,通過螺桿的自鎖能力使機械手關節不會受蘋果重力而張開,裝配圖如圖1 所示。
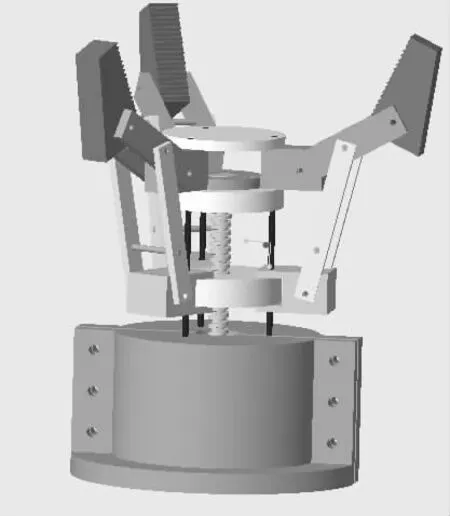
圖1 裝配圖
1.2 手指的結構設計
手指部分包括近端關節和末端關節,設計執行機構時要考慮采摘過程中是否會對果實造成傷害,為了盡可能降低對果實造成的傷害,決定在末端關節的內側裝上較為柔軟的尼龍材料。
近端關節材質為鋁合金;末端關節材質為尼龍材料。
手指部分包括近端關節、末端關節,為了使機械結構易于制作,因此采用曲柄滑塊結構,連桿簡圖如圖2所示。
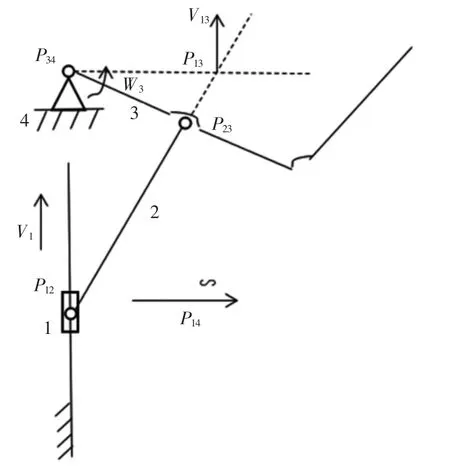
圖2 連桿簡圖
1.2.1 運動分析
1)尋找瞬心P13。對于直接連接的桿件,其瞬心可直接判斷出P12P34P23瞬心。P12是構件1、2 的瞬心,P14是構件1、4 的瞬心,P34是構件3、4 的瞬心。
對于兩構件未直接相連的,其瞬心利用三心定理進行判斷,延長1、2 桿和垂直于桿1 的點,可判斷出瞬心P13。
2)求角速度與螺桿速度關系
作圖分析,可得出以下公式
式中:IP12P34為P12到P34的距離,W3為P13的角速度。又因為P13是構件1、3 的瞬心,根據式(1)和式(2)可得。
1.3 手指的尺寸確定
機械手第一個關節末的位置如圖3 所示,在坐標系O-xyz 中 為 點A(0,y1,z1),O'O=l1,sin120°=0.78,cos120°=-0.5。
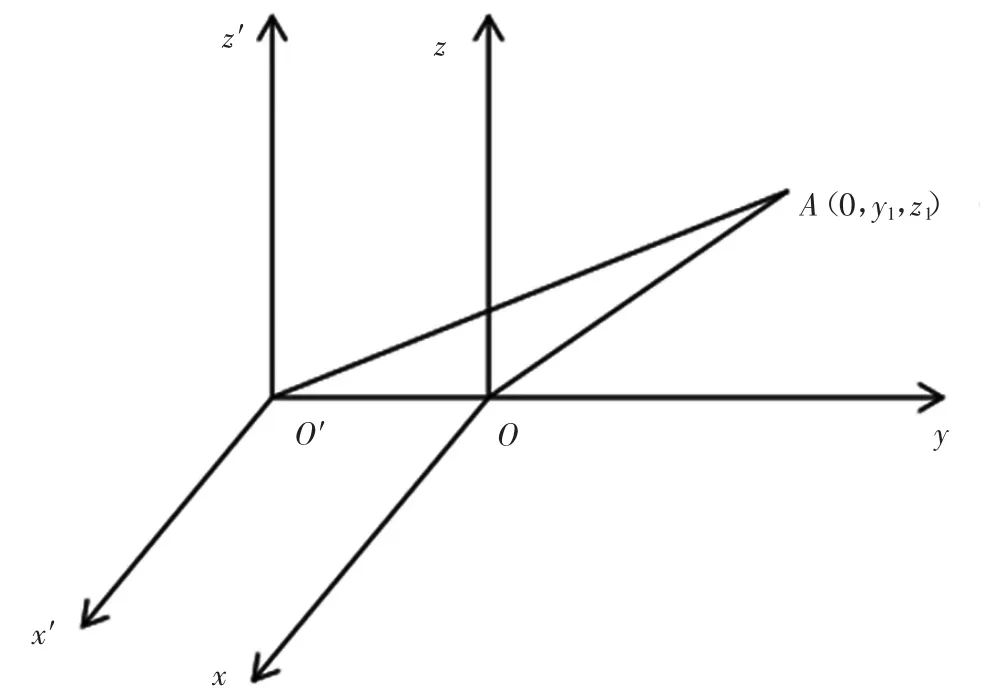
圖3 第一個手指位置圖
對于O'-x'yz'坐標系,A 點對應的坐標為A'(0,l1+y1,z1)
利用H 變換矩陣,分別沿z 軸旋轉120°為另外2個機械手手指的坐標
因為空間坐標中的O'A,O'B,O'C 大小相等,且為繞z 軸旋轉120°所得,所以3 點連線為一個正三角形,如圖4 所示。
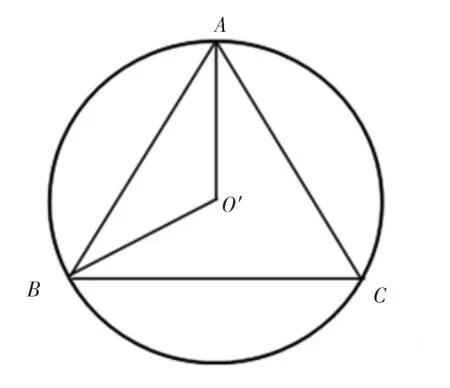
圖4 蘋果橫切面簡圖
由公式
可求得手指末端關節長度
蘋果高度一般為50~110 mm,直徑在50~110 mm,為機械手指尺寸提供依據。
由R≥55,z1≥55,已知l1=40,z1選取為60,OA選取為80。
1.4 受力分析
機械手夾持蘋果重量為100~400 g,對其受力分析如圖5 所示。
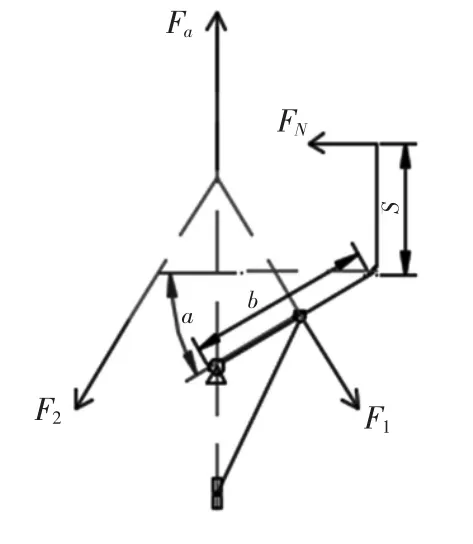
圖5 受力分析圖
機械手另外2 個第二關節的受力處根據三力平衡匯交定理,可合成為力F2與F1,其匯交于一點,Fa為螺母向上的推力,構成三力平衡,可得公式
三指對蘋果的力可表示為FAFBFC,利用三力平衡匯交定理,FAFB的合力FN與FC平衡,所以根據公式2FNμ≥mgk1,可求得
由尼龍材料的摩擦系數μ=0.15~0.25,取μ=0.2,安全系數k1取1.5,a=30°;蘋果重量選擇0.4 kg 進行計算;求得FN≥14.7 N,因此選擇夾持力為15 N,求得驅動力Fa≈47.3 N。
1.5 手掌的結構設計及相關計算
手掌處主要是螺桿的設計及計算,本文中采用滑動螺旋傳動,其結構簡單,成本低廉,并且相較于滾動螺旋傳動,滑動螺旋傳動有自鎖能力;因此本部分主要進行滑動螺旋傳動中螺桿螺母尺寸的選擇、強度校核、自鎖性驗算以及穩定性校核,其螺桿示意如圖6 所示。
圖6 螺桿圖
1.5.1 絲杠軸向載荷力的計算
螺桿上方重量為m=2 kg。
軸向載荷公式如下
由式(8)進行計算得F≈67 N,因此選取軸向載荷力F=70 N,最為合適。
1.5.2 選材以及許用應力計算
螺桿螺母都采用45 號鋼,選擇梯形螺紋,其牙形角為30°,因此由《機械設計手冊》,可取σp為360 MPa,由
可取許用拉壓力σp=90 MPa。
因為機械手上升運動為低速運動,因此查《機械設計手冊》得螺桿對螺母的許用壓強[p]=7.5~13 MPa,取值為10 MPa。
1.5.3 螺紋尺寸選擇及校驗
螺紋尺寸取值,見表1。

表1 螺紋尺寸 mm
由耐磨性校驗螺紋中徑是否合適:
當螺紋為整體式時,螺紋升角系數(ψ)取1.2~2.5,取ψ=1.5。
依據《機械設計手冊》梯形螺紋,取ξ=0.8,F=70 N。
由公式可計算出螺紋中徑
所以螺紋中徑選擇為9 mm,上表尺寸數據合適。
因此,基本牙型高度
螺母高度
旋合圈數
選取中等精度,螺旋副標記為Tr10×2—7H。
1.5.4 自鎖性校驗
導程P=2 mm,查《機械設計手冊》表12-1-4,可得螺紋升角
查《機械設計手冊》表12-1-7,可得f=0.15~0.17,取值0.17,得
因為λ<ρ,所以自鎖可靠。
1.5.5 驅動轉矩計算
由公式
計算出驅動轉矩T=70.277(N·mm)。
1.6 手腕的結構設計及機械手材料選取
手腕主要結構是安裝電機,以及對接機械手臂,對其材料有一定要求,而果農采摘水果時,還可能會遇到惡劣天氣,因此材料需要一定強度和耐腐蝕性。
鋁合金材料質量輕,強度夠,耐腐蝕且價格低廉,所以材料采用鋁合金。
2 控制系統硬件設計
2.1 控制系統硬件組成
硬件是由主機、接口電路及外部設備組成。其相應的示意圖如圖7 所示。
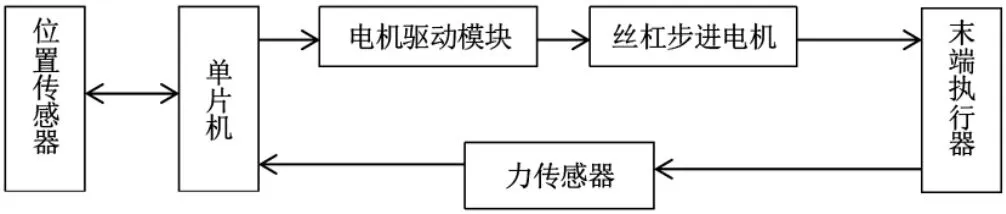
圖7 控制系統硬件示意圖
機械手及其末端執行器在運動時需要各種傳感器進行輔助,但因個人知識水平有限,因此本文只對其中的單片機、力傳感器、電機部分進行相關選用及設計。
2.2 力傳感器
2.2.1 RP-C 電阻式壓敏傳感器
人手摘取蘋果時,是通過皮膚和眼睛把消息傳遞給大腦,實現抓取;與此相同,機械手實現抓取動作,需要傳感器把信號傳遞給單片機,隨后單片機控制電機進行轉動,帶動執行裝置完成抓取蘋果功能。
本文選用的壓力傳感器是RP-C10-ST 薄膜壓力傳感器,這是一種直徑為10 mm 的圓形柔性傳感器,由綜合機械性能優異的聚酯薄膜,高導電材料和納米級壓力敏感材料組成,由曲線圖查表獲得Rx和F 的關系式
因為蘋果壓力小于20 N 時,表皮沒有損傷,但如果超過20 N,蘋果表皮雖然沒有直接損壞,但內部出現組織損壞。為了使蘋果采摘時不被損壞,則手指的壓力不應該超過20 N。
依據曲線可以看出,隨著壓力的增大,電阻不斷變小,因此傳感器輸出的電阻應該大于26.6 Ω。
2.2.2 壓力傳感器應用電路
壓力傳感器輸入信號,單片機要檢測到該信號時,需要相應電路進行該信號的放大與轉化;應用電路主要使用電阻分壓器,然后把分壓的電壓輸入電壓比較器中,然后通過設計使其輸出高低電平,最后連接相關單片機串口,使單片機進行步進電機啟停的控制。
1)電阻分壓器。電源電壓為5 V,傳感器可以等效為一個可變電阻,其串聯一個R1=20 Ω 的電阻,整個電路起到分壓的作用。
輸出電流
分壓電壓
由上公式可推導出
其曲線圖如圖8 所示。
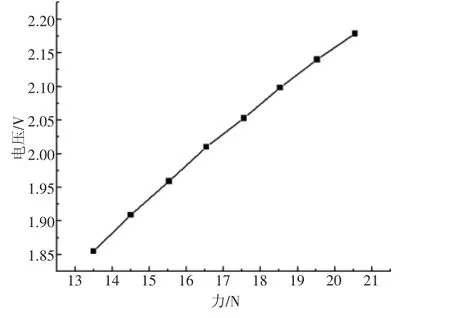
圖8 電壓/力關系圖
2)電壓比較器。UP處接入VN口,VE接一個比較的電壓,當VN>VE時,比較器不導通,輸入5 V 電壓作為高電壓;反之,當VN<VE時,比較器導通,輸出低電壓。
蘋果抓取的力一般不會超過15 N,其為了采摘蘋果時不損壞果皮,按照曲線圖,電壓不應該大于2.1 V,但為了單片機在手抓取時發出信號,使電機停止轉動,應該使VE接一個1.9 V 的電壓。
當UP電壓超過1.9 V 時,電壓比較器輸出高電壓,單片機接口檢測出數值為“1”,電機停止轉動,螺母自鎖使機械手抓取的蘋果不會掉落。
2.3 單片機選用
在本次蘋果采摘機械手的控制系統中,選擇AT89C51 單片機,其通過IO 口輸出的具有時序的方波作為對機械手控制動作的信號,這一方波信號會通過芯片LN298,進行信號放大,然后驅動步進電機以此來實現機械手的摘取動作。
AT89C51 單片機與MCS-51 單片機兼容,價格便宜,IO 口的操作簡單,指令簡單,極其適合用于作為本文控制部分的設計。
2.4 電機選用
本次設計的蘋果采摘機械手的驅動部件是由電機實現的,因此電機的選擇是整個結構設計和控制系統設計的關鍵。常見的機器人的運動形式在于對步進電機的控制和驅動,為了設計的方便,此次設計選擇電機為四相的步進電機(內阻33 Ω,步進角度1.8°,額定電壓12 V)。
想要驅動電機,必須需要響應的驅動電路,因此使用LN298 芯片,不僅可以充分發揮了步進電機的功能,能穩定地驅動步進電機,而且從經濟考慮,價格不高,其可以直接用單片機模擬出時序信號,控制不復雜。
本文步進電機步距角為1.8°,螺桿導程為2 mm,所以單片機需要發出200 個脈沖,螺桿螺母將轉動一周,其簡單的系統結構圖如圖9 所示。
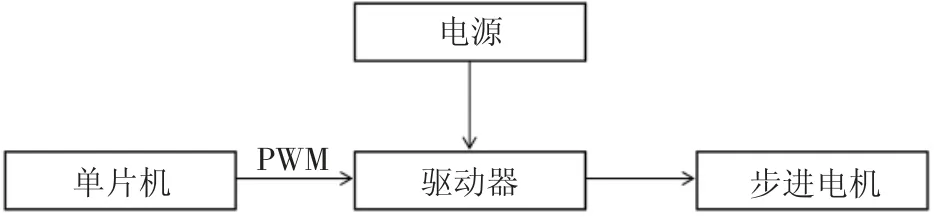
圖9 步進電機控制系統結構圖
如圖10 所示,單片機對EN A、EN B 口發送方波脈沖信號,接P3.4、P3.5 引腳,IN1~IN4 接AT89C51 單片機P0.0~P0.3 口;單片機接受到力傳感器和位置信號后,通過輸出脈沖,然后經過LN298 芯片信號放大,實現電機正反轉以及啟停。
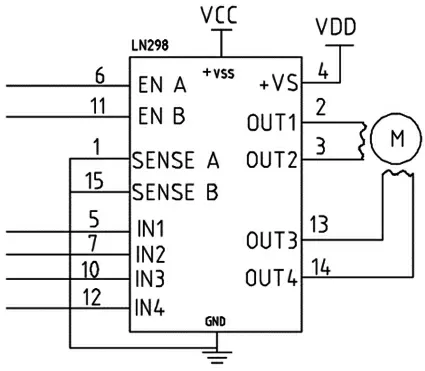
圖10 電機接線圖
3 仿真分析
3.1 三維裝配
在機械手裝配過程中與其他裝配過程大致相同,在裝配時,需要選擇合理的連接方式,使后期仿真順利進行,因此選用銷釘、滑塊等方式進行裝配,其裝配圖先進行手指部分,然后進行總裝配。
3.2 仿真過程
為了使設計的產品能夠合理地進行運動以及實現需要的功能,在設計中往往會進行仿真分析,本文利用creo4.0 進行仿真分析,其仿真分析過程如下。①打開已經裝配好的機械手爪,點擊“應用程序”,運行“機構”命令。②點擊電動機,為機械手添加驅動裝置。③進行機構分析,點擊運行。④點擊“回放”,然后打開“動畫”界面。⑤打開“動畫”界面后,選擇播放查看仿真是否合適,隨后點擊“捕獲”,選擇保存路徑,點擊保存的視頻類型,隨后點擊確定,最后就能夠獲得仿真動畫視頻。⑥曲線圖繪制。點擊測量,進行新建測量定義,輸入需要測量的角速度連接軸,點擊圖形工具,曲線圖如圖11 所示。
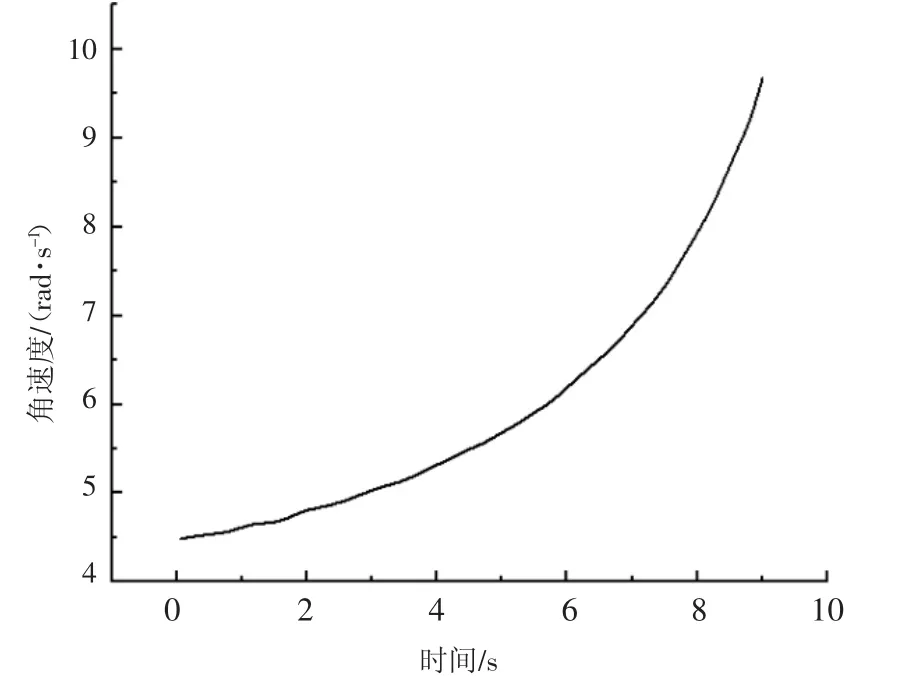
圖11 角速度圖
4 結束語
蘋果人工采摘作業季節性強、人工成本高、勞動強度大,是蘋果生產鏈中最耗時、最費力的一個環節。因此,研制一款蘋果采摘機器人具有重要的經濟意義,能夠有效降低工人勞動強度,提高生成效率,保證蘋果及時采收。通過對蘋果采摘機器人手指和手掌進行結構設計,尺寸計算和受力分析,完成了蘋果采摘機械手的整體方案,并進行了控制系統的設計和簡單的仿真,驗證了該機械手的設計合理性,零件的結構要素符合預期的設計目標,為下一步的步態規劃和樣機研制奠定了基礎。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
