基于卷積神經網絡的雷達工作模式識別
2023-08-07 09:20:38賈邦玲時艷玲
科技創新與應用 2023年22期
賈邦玲,時艷玲,姜 磊
(1.南京郵電大學 通信與信息工程學院,南京 210003;2.中國航天科工集團八五一一研究所,南京 210007)
雷達工作模式識別是通過先驗知識和雷達信號偵察來估計雷達內部的工作狀態,為威脅等級評估、干擾決策和雷達狀態預測提供了基礎[1-2]。在復雜的現代空戰環境下,實時準確獲取敵方雷達狀態信息對于提高戰斗機的生存率至關重要。然而,多功能雷達的發展使得雷達信號樣式和工作模式越來越復雜,這給雷達工作模式的識別帶來了挑戰。機載雷達對空工作時的6 種工作模式包括速度搜索(Velocity Search,VS)、跟蹤加搜索(Track and Search,TAS)、邊測距邊跟蹤搜索(Range While Search,RWS)、多 目 標 跟 蹤(Multi Target Tracking,MTT)、邊搜索邊跟蹤(Track While Scan,TWS)和單目標跟蹤(Single Target Track,STT)等[3-5]。
文獻[6]從戰術用途、信號特征和掃描規律3 個方面對邊掃描邊跟蹤等6 種典型空-空工作模式進行了研究。通過分析、總結、對比梳理了各個模式的典型特征,論證了工作模式識別的可行性。文獻[7-8]提出了基于變換域和幅度重排的工作模式識別算法。文獻[9]首先根據雷達信號生成原理和波形提取分層化特征再結合分層的Bayes 網絡實現對雷達工作模式的識別,進一步地設計了Bayes 網絡的基本結構,并通過實驗驗證了Bayes 網絡對工作模式識別的有效性和對參測數據不確定性的魯棒性。隨后,文獻[10]提出一種基于DS證據理論的工作模式判定體系,利用提取的特征參數構建雷達信號特征庫,通過預判斷流程快速實現單平臺下的模式分組。然后,對分組后的多維空間模式識別結果運用DS 證據理論,采用分布式結構進行單平臺多周期時域融合和多平臺空域信息融合,最終實現了雷達工作模式判定。李輝等[11]針對不同工作模式下脈沖信號的變化規律,提出了一種基于脈沖多層次建模的識別方法,并取得良好的工作模式識別正確率。惠曉龍[12]首先開創性地將雷達信號特征利用圖結構來表示,通過構建基于半監督的圖卷積神經網絡(Graph convolutional neural network,GCN)網絡模型用于相控陣雷達工作模式的識別,接著,他又利用主成分分析(Principal Component Analysis,PCA)技術對各種工作模式下的雷達信號特征參數做降噪處理,并縮小GCN 網絡規模,隨后提出了基于PCA 的多層感知器(Multilayer Perceptron,MLP)識別算法[12],進一步提高了相控陣雷達工作模式識別的概率。
本文首先基于上述雷達不同工作模式的特點提取特征參數,再獲取特征參數的方向梯度直方圖(Histogram of Oriented Gradient,HOG)特征,構建卷積神經網絡(convolutional neural network,CNN)模型,給出具體實施的方案和步驟,提高對雷達工作模式的識別的準確率。
1 雷達典型工作模式
為滿足復雜的電子戰應用場景對雷達的功能需求,機載雷達采用了多種工作模式,其中包括主要的6種 典 型 雷 達 工 作 模 式:VS、RWS、TWS、TAS、STT 和MTT。這6 種工作模式的雷達信號參數特征見表1。其中CP 表示常規信號,LFM 為線性調頻信號,NLFM 為非線性調頻信號,PW 表示脈沖的寬度,PRF 表示脈沖的重復周期。
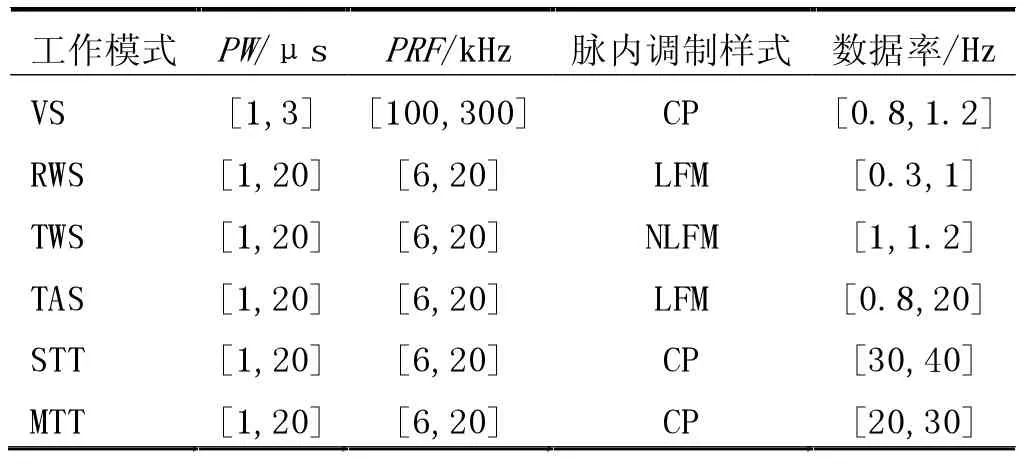
表1 雷達信號特征參數
VS 模式主要用于大范圍的搜索,戰術上一般用于威脅告警和遠距離發現目標,數據率低,不能引導武器攻擊,是威脅等級較低的一種工作模式。RWS 和TWS模式用于維持目標跟蹤,且都為中重頻,具有多組脈沖重復間隔。TAS 模式具有很強的波束捷變能力,每個目標經歷的狀態包括搜索、確認、跟蹤、小搜(重新捕獲)和航跡終結。STT 和MTT 模式常用固定的PRF 來避免距離和速度遮擋,其波束駐留時間較長,STT 主要目的是連續、精確地獲取目標的方位、距離和速度信息。MTT 主要目的是對多個目標進行跟蹤[13]。
2 HOG 特征的提取
HOG 特征是一種常用于目標檢測的特征描述方法,其通過分析圖像中不同區域的梯度方向直方圖來表征物體的形態特征。這種方法可以有效地提取圖像中的紋理信息,從而在目標檢測和圖像識別任務中發揮重要作用。由于梯度主要存在于邊緣地區,所以該算法計算的局部區域梯度或方向邊緣密度能夠很好描述圖像中的線條邊緣、拐點、形狀及變化規律[14-15]。基于該思想,將HOG 特征提取引入到所提4 個特征組成的圖像分析中,以實現對信號的邊緣、形狀和變化規律的檢測。
首先,對圖像進行梯度計算,得到圖像在水平和垂直方向上的梯度信息,并利用這些信息計算每個像素位置的梯度方向
式中:在像素點(x,y)處,Gx(x,y)表示水平方向的梯度;Gy(x,y)表示垂直方向的梯度;H(x,y)表示像素值。該像素點的梯度幅值和方向可由下式計算得到
在算法中,常先用[-1,0,1]進行卷積操作求得x 方向的梯度圖,再采用[-1,0,1]T進行卷積操作求得y 方向的梯度圖,而后采用上述公式求梯度幅值和方向。
使用梯度方向構建直方圖:對于每個像素,根據梯度方向將其投票到相應的直方圖通道中。我們將梯度方向劃分為9 個區間。例如,假設一個單元的尺寸為6×6,則對這個單元內的36 個像素點,先判斷像素點梯度方向所屬的區間,后根據像素點的梯度幅值大小和梯度方向的大小進行線性加權于對應的梯度方向區間。投票采用加權方式,每一票帶有權值,權值基于像素點的梯度幅度計算。權值可以使用幅值本身或其函數來表示,實際測試結果表明,使用幅值本身獲得最佳效果。單元形狀可以是矩形或星形的。直方圖通道是在0~1800(無向)或0~3600(有向)范圍內平均分布的。大量實驗結果表明,要能夠在工作模式識別試驗中取得最佳的效果,通常得使用無向梯度和9 個直方圖通道的組合。
算法HOG 提取特征的過程:首先獲取原始圖片,并進行灰度化處理;然后對處理后的圖片歸一化處理,一般采用Gamma 校正法,主要是為了調節圖像的對比度,以減少圖像局部的陰影,提高對噪聲的抗干擾性能;其次計算圖像各像素尺寸梯度和方向梯度,在獲取邊緣信息的同時能夠縮減光照干擾;接著將圖像分割成若干個小單元,并統計不同梯度的個數,得到每個單元的描述符;最后是將每幾個單元組成為一個模塊,一個模塊內所有單元的特征描述符串聯后會得到該模塊的HOG 特征描述符。總的HOG 特征描述符是將所有圖像內模塊的HOG 特征描述符串聯起來,也就是最終的特征向量。具體流程圖如圖1 所示。
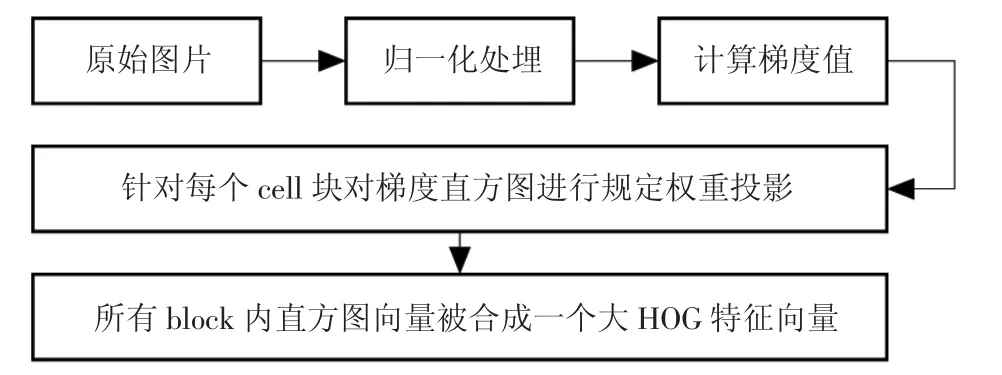
圖1 HOG 特征提取流程圖
3 仿真實驗流程
在進行工作模式識別之前,需要對這4 個參數進行預處理,提取每個脈沖內的脈沖寬度、脈沖重復周期、脈內調制樣式和數據率這4 個參數,連續提取15個脈沖,獲得一個4×15 的矩陣,將這個矩陣構成一幅圖片。每15 個脈沖為一組,圖片大小為[4,15,1];每種模式共需750 個脈沖,750 組脈沖生成50 張圖片,一共50×6=300 張圖片。
由于在提取HOG 特征時所用的圖像矩陣維數為4×15,所以,CNN 的深度不宜過深。在實驗中,CNN 的核心架構僅采用了2 個卷積層、1 個池化層和1 個全連接層。基于CNN 的工作模式識別算法如下。
步驟一:利用已知雷達工作模式數據集樣本,組建脈沖重復周期、脈沖寬度、數據率和脈內調制樣式4 類特征樣本。
步驟二:利用多脈沖的四特征構建圖像矩陣,提取HOG 特征。
步驟三:構建CNN,網絡模型Layers 共13 層,其中包括輸入層([4,15,1])、卷積層1(卷積層、歸一化層、relu 層和最大值池化層)、卷積層2(卷積層、歸一化層、relu 層和最大值池化層)、平均值池化層、全連接層、softmax 層和分類層。
步驟四:利用訓練集訓練CNN 模型。
步驟五:利用測試集對訓練好的CNN 模型進行測試和調整。
步驟六:對未知的輻射源信號進行脈沖重復周期、脈沖寬度、數據率和脈內調制樣式參數特征提取,構建圖像矩陣,提取HOG 特征。
步驟七:利用訓練好的CNN 模型進行雷達工作模式的識別。
基于CNN 的雷達工作模式識別的流程圖如圖2所示。
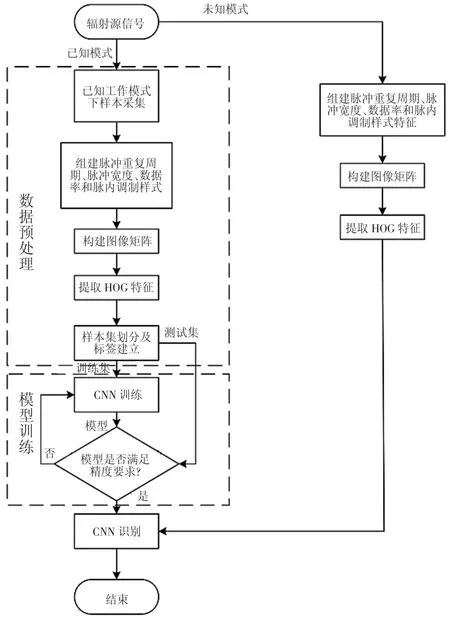
圖2 基于CNN 工作模式識別流程圖
4 實驗結果與分析
根據上述介紹的方法,下面通過實驗來驗證本文所提出的HOG+CNN 算法對雷達工作模式識別的準確性。圖3 為本文所提出的HOG+CNN 算法在不同信噪比下的識別準確率折線圖;圖4 為本文所提出的HOG+CNN 算法在不同信噪比下的6 種工作模式總體識別準確率折線圖。從圖3 中可以看出,在信噪比不低于8 dB 時,6 種工作模式的總體識別準確率達到95%以上。從圖4 中可以看出,在信噪比不低于10 dB 時,6種工作模式的識別準確率均接近100%。這是因為6 種工作模式信號在送入卷積神經網絡之前構建了特征圖片并且通過HOG 提取了特征,比直接送入卷積神經網絡內部生成的特征更加準確有效,這樣就增強了卷積神經網絡對這6 種工作模式的識別準確度。
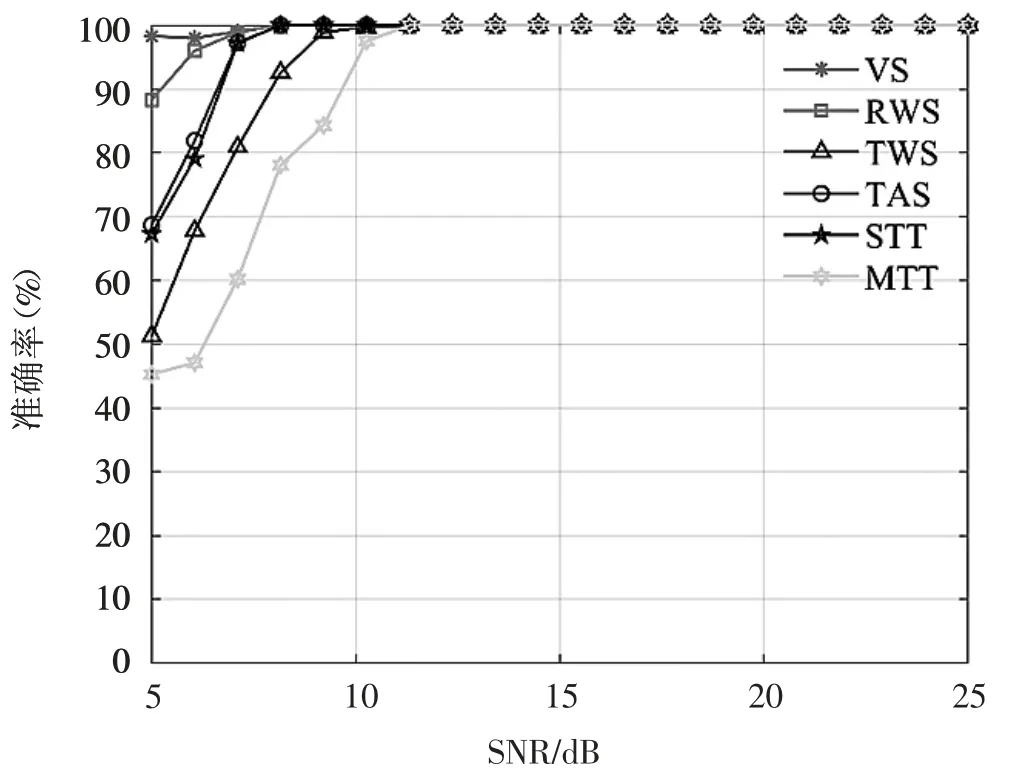
圖3 6 種雷達工作模式識別準確率
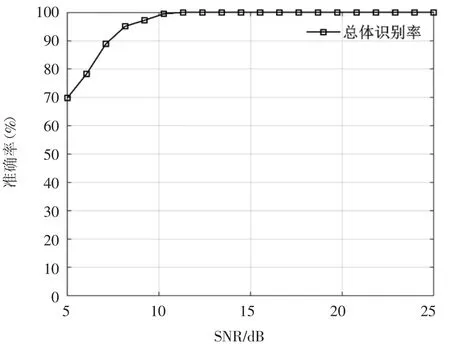
圖4 總體識別準確率
5 結束語
本文提出一種基于HOG+CNN 的雷達工作模式識別方法,首先根據雷達發射信號脈沖寬度、脈沖重復周期、脈內調制樣式和數據率4 個特征構建圖片,再提取特征圖片的HOG 特征送入卷積神經網絡進行6 種雷達工作模式識別。仿真實驗結果表明:通過上述方法對雷達的工作模式識別具有較高的準確度,在工程應用中具有一定的參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
電子測試(2017年23期)2017-04-04 05:06:50
智能系統學報(2017年5期)2017-01-22 11:21:30
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
智能系統學報(2015年3期)2015-01-29 15:20:12
