番茄采摘機械臂的設計與研究
2023-08-02 02:43:42仝敏
自動化儀表 2023年7期
仝 敏
(陜西國防工業職業技術學院智能制造學院,陜西 西安 710300)
0 引言
中國的鮮食番茄產量占比高達90%。由于番茄采摘周期較短、人工釆摘效率較低,故嚴重影響番茄的品質[1]。使用機器人進行采摘作業可以有效提高采摘效率、降低生產成本[2]。我國農業采摘機器人的研究相對較晚,研制的采摘機器人有直角坐標式、關節型、圓柱坐標式,對于果實的定位主要有激光掃描、雙目視覺、單目視覺等方法。目前,采摘機器人與農藝結合不緊密,靈活性不足,工作空間限制較大。
采摘機器人一般由具有自主導航移動功能的移動底盤以及具有采摘收集功能的采摘機械臂2個部分組成。本文根據溫室標準化番茄種植模式對番茄采摘機械臂進行設計。該設計首先采用Denvit-Hartenburg(D-H)法建立機械臂數學模型并進行運動學分析;然后基于蒙特卡洛法對采摘機械臂的工作空間進行分析[3-4],并進一步確定機械臂各桿長、工作負載等相關參數;最后依據鰭條效應設計三自由度柔性末端執行器,完成采摘機械臂搭建。
1 機械臂需求分析
采摘機器人可由移動底盤、升降臺、采摘機械臂等組成。該機器人移動底盤沿壟道行進一段距離后停車。升降臺從最低位置每次抬升一單位高度。機械臂對該高度的番茄進行采摘。采摘完成后升降臺上升,則機械臂繼續采摘,直到升降臺升到最高位置即完成采摘。
本文對采摘機械臂進行設計。移動底盤每次沿壟道移動40 cm,則番茄所在空間可表示為2個平面所夾的區域。番茄所在空間如圖1所示。

圖1 番茄所在空間圖
在圖1所示空間區域內,番茄采摘機械臂可以采摘1個矩形區域內的所有成熟番茄。
2 機械臂運動學分析
機械臂按照結構,主要分為直角坐標系式機械臂、圓柱坐標系式機械臂、球坐標系式機械臂和多關節式機械臂[5]。圓柱坐標系式和直角坐標系式機械臂體積較大、笨重、不靈活,而多關節式機械臂體積較小、速度快、靈活性高[6]。依據功能要求,本次設計的采摘機械臂為四自由度關節型機械臂。針對溫室番茄的種植模式,為便于采摘和控制,機械臂的末端腕部關節需始終保持水平。采摘機械臂結構如圖2所示。

圖2 采摘機械臂結構示意圖
圖2中,機器人基座至末端依次編號為0~5。
本文設計的四自由度采摘機器人采用關節型結構。該結構可看作是1個由4個連桿和4個關節軸組成的開鏈式多連桿機構。該結構中:始末連桿分別為機器人的基座和末端;相鄰連桿之間用關節連接。本文將采摘機器人基座到末端依次編號為0,1,…,n,連桿(i-1)與連桿i的運動記為關節i′[7]。本文采用D-H法建立番茄采摘機械臂坐標系。機械臂坐標系如圖3所示。

圖3 機械臂坐標系圖
根據D-H法建立坐標系的過程如下:首先,在基座處建立基坐標系;然后,設原點為O0,關節1的坐標系與原點重合;最后,依次在關節2至關節4處建立坐標系。坐標系O4建立在末端執行器中心點處[8]。采摘機械臂D-H參數如表1所示。
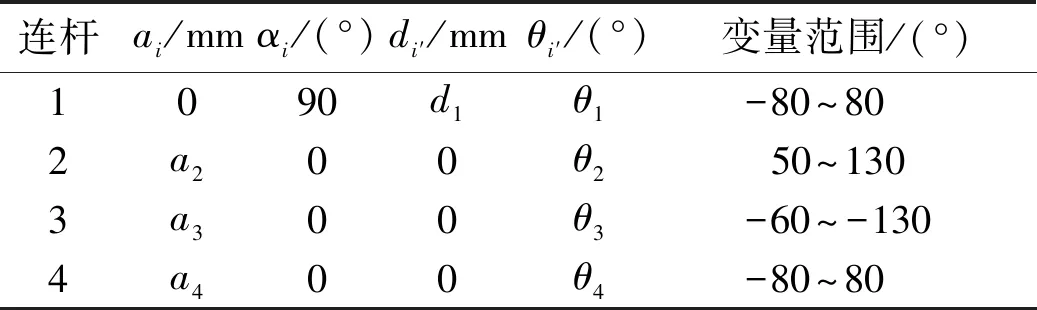
表1 采摘機械臂D-H參數表
表1中:ai為連桿i的長度;αi為連桿i的扭角;di為關節i′的偏置;θi為關節i′的轉角[9]。
2.1 正運動學分析
機器人的正運動學是已知連桿長度和關節角度,計算機器人末端執行器的位姿[10]。其可依據機器人的連桿和關節的構型配置,用1組特定的方程建立機器人末端執行器的坐標系和參考坐標系的關聯[11]。常用的方法為D-H表示法[12]。相鄰坐標系之間的變換矩陣可以用式(1)表示。
(1)
對于n個自由度的機器人,通過D-H參數即可得到n個D-H矩陣。本文將所有矩陣按次序連乘,可得采摘機器人運動學模型,進而推導出式(2):
(2)
式中:nx=cosθ1cos(θ2+θ3+θ4);ox=-cosθ1sin(θ2+θ3+θ4);ax=sinθ1;px=cosθ1[a2cosθ2+a3cos(θ2+θ3)+a4cos(θ2+θ3+θ4)];ny=sinθ1cos(θ2+θ3+θ4);oy=-sinθ1sin(θ2+θ3+θ4);ay=-cosθ1;py=sinθ1[a2sinθ2+a3sin(θ2+θ3)+a4sin(θ2+θ3+θ4)];nz=sin(θ2+θ3+θ4);oz=cos(θ2+θ3+θ4);pz=a2sinθ2+a3sin(θ2+θ3)+a4sin(θ2+θ3+θ4)+d1。
本文設置各關節角度,通過式(2)可得到末端位姿[13]。[nxnynz]T、[oxoyoz]T、[axaya]T為末端執行器相對于基坐標系的姿態,[pxpypz]T為末端執行器相對于基坐標系的位置。其分別代表空間中的x、y、z軸坐標[14]。
2.2 逆運動學分析
由于機械臂在運動過程中,其腕部始終處于水平狀態,即軸y4始終垂直于平面x0Oy0,故坐標系{4}和坐標系{0}的變換矩陣還可以用式(3)表示。
(3)
式中:φ為軸x4與軸x0的夾角;x4、y4、z4為坐標系{4}相對于坐標系{0}的平移變換。
已知機械臂各關節和連桿參數以及執行機構與固定參考坐標系相對位姿的情況下,正運動學分析得到機器人運動學模型[15]。本文令式(2)和式(3)中的對應元素相等,則可依次推導出機械臂連桿之間的夾角θ1~θ3,完成機械臂的逆運動學求解。四自由度機器人的運動學反解可能存在多解。受機器人結構的限制,可選取一組符合機器人作業要求的滿意解。
3 機械臂工作空間分析
機器人的工作空間是機器人在運轉過程中,手部參考點在空間所能達到的點的集合是1個重要的運動學指標,主要用于衡量機器人活動范圍[16]。計算機器人給定所有位姿時,末端可到達目標點的集合,即為全工作空間。機械臂末端點在坐標系{4}的齊次坐標表示為[0 0 0 1]T,則該點在基坐標系的坐標可表示為:
(4)
常見的方法有數值法和蒙特卡洛法。本文選用蒙特卡洛法。
蒙特卡洛法是從數值法衍生發展而來的,主要通過隨機選取大量采樣點來盡可能構建出機器人完整的工作空間,是1種基于隨機概率的算法。在本文設計中,機械臂末端需到達如圖1所示的2個平面所夾區域內任何1點。本文設a2、a3、a4分別為32 cm、29 cm、13 cm,基于蒙特卡洛法,對番茄采摘機械臂的工作空間進行求解。
由于四軸機器人的每個關節均具有機械限位,因而需對4個關節轉角進行設置,以確保機械臂的各關節在其相應取值范圍內工作。本文依據D-H參數表確定各軸的轉角取值范圍并將其轉換為弧度值。本文以關節轉角活動范圍的最大值減去最小值,并與rand函數相乘后得到各關節轉角對應的步長,進一步得到各關節的隨機變量。其中,隨機取樣次數N越大,得到的機器人工作空間越準確[17]。
本文在Python IDLE3.6.1集成開發環境下,利用numpy中的rand(1,N)函數,選擇隨機產生在所設角度范圍的4 000個值,分別代入式(4)中的末端點的位置向量[pxpypz1]T,再利用matplotlib中的scatter函數繪制。
繪制的機械臂工作空間如圖4所示。

圖4 機械臂工作空間圖
由圖4可知,在15 cm 在本文設計中:關節1~3均使用帶有諧波減速器的無刷電機進行驅動;關節4和關節5末端執行器使用舵機驅動。當機械臂的各臂均處于水平狀態時,各關節的力矩最大,進而可求出各關節扭矩。機械臂受力分析如圖5所示。 圖5 機械臂受力分析圖 本文使用SolidWorks軟件繪制三維模型,對三維模型進行了裝配。機械臂三維裝配如圖6所示。 圖6 機械臂三維裝配圖 末端執行器上安裝了3個舵機。每個舵機質量約為55~65 g。該末端執行器主要由手掌、方形光電開關、單目攝像頭和手指組成。手指由雙軸舵機、鰭條效應器支架和鰭條效應器組成,可較好地貼合番茄,有效減小對番茄的損傷。末端執行器的總質量為150 g,番茄單果質量約為100~170 g。關節4選用LD-220MG型數字舵機。關節3選用42BL80S09-230型無刷電機和ASM46AA2-H50型諧波減速器。關節2選用60BL100S15-230型無刷電機和ASM66MC-H100型諧波減速器。關節1選用與關節3同型號無刷電機和諧波減速器。 中國的鮮食番茄產量巨大,采用番茄采摘機器人可降低番茄生產成本。本文基于番茄采摘的實際場景,針對標準化溫室番茄采摘中存在的問題,采用D-H法建立四自由度采摘機器人運動學模型。本文對四自由度番茄采摘機械臂的正運動、逆運動進行分析,依據采摘所需空間確定機械臂各桿長。本文基于蒙特卡洛法對采摘機械臂的工作空間進行分析,將各關節處于極限位置,獲取各關節扭矩,進而選取各關節電機型號。本文使用SolidWorks軟件對機械臂繪制三維模型,完成裝配、加工、制作機械臂各零件及采摘機械臂的搭建。其中,三自由度柔性末端執行器用于抓取果實在設計采摘空間中的隨機位置,讓機械臂對番茄進行自主采摘,在末端執行器接近目標的過程中存儲視覺處理后的圖像,并記錄視覺處理后所得圖像的特征信息。本文設計等間隔拍攝采摘過程中的照片。整個過程共計拍攝21張照片。分析結果表明,采摘機器人采摘過程中的橫向偏差、縱向偏差和面積偏差均逐漸減小,最終趨于穩定值。采摘機器人采用折斷的方式實現果梗分離。該設計能滿足現代化標準番茄種植模式的采摘要求,降低采摘過程中對人工的依賴,為關節型采摘機器人的后續設計提供理論支持。4 機械系統設計


5 結論
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
