基于改進遺傳算法的四旋翼無人機PID控制參數整定
2023-08-01 08:28:28陳俊東
現(xiàn)代信息科技 2023年11期


摘? 要:四旋翼無人機是一種多輸入、多變量、強耦合、欠驅動的復雜系統(tǒng),對控制算法要求高,而PID控制參數在實際整定中難以達到最優(yōu)。因此,提出一種基于改進遺傳算法的PID控制參數整定方法,通過引入LHS初始化種群、最優(yōu)個體保留、自適應動態(tài)交叉與變異等組合改進策略,使遺傳算法易陷入局部最優(yōu)、搜索效率偏低的問題得以改善,利用其對四旋翼無人機姿態(tài)控制系統(tǒng)PID參數進行優(yōu)化整定,結果表明,該方法能大幅提高四旋翼無人機姿態(tài)控制系統(tǒng)的動態(tài)性能。
關鍵詞:四旋翼無人機;遺傳算法;PID參數整定
中圖分類號:TP311? ? 文獻標識碼:A? 文章編號:2096-4706(2023)11-0175-04
PID Control Parameter Tuning for Quadrotor UAV Based on Improved Genetic Algorithm
CHEN Jundong
(China Helicopter Research and Development Institute, Jingdezhen? 333000, China)
Abstract: Quadrotor UAV is a complex system with multi-input, multi-variable, strong coupling and underdrive, which has high requirements for control algorithms, and PID control parameters are difficult to achieve the optimal in actual tuning. Therefore, this paper proposes a PID control parameter tuning method based on improved Genetic Algorithm (GA), which improves the problems of local optimization and low search efficiency in GA by introducing LHS initialized population, optimal individual retention, adaptive dynamic crossover and mutation, and other combination improvement strategies. This paper uses it for optimization and tuning of quadrotor UAV attitude control system PID parameters, and the results show that this method can greatly improve the dynamic performance of quadrotor UAV attitude control system.
Keywords: quadrotor UAV; Genetic Algorithm; PID parameter tuning
0? 引? 言
四旋翼無人機作為最為常見的無人直升機構型之一,具有結構簡單、機動性強等特點,現(xiàn)已廣泛應用于航拍、搶險救災、軍事偵察、農業(yè)植保等軍民領域[1]。而作為一種典型的多輸入、多變量、強耦合、欠驅動的復雜系統(tǒng),其對控制算法在控制精度、抗干擾能力、魯棒性等方面均具有較高的要求。串級PID控制算法由傳統(tǒng)PID算法演進而來,在姿態(tài)控制中增加角速度反饋,能有效提高算法的抗干擾能力,是目前四旋翼無人機主流控制算法之一[2]。然而,在實際設計PID控制器過程,PID控制參數整定往往對經驗依賴程度高,難以保證最佳控制效果。
遺傳算法具有強大的全局搜索能力以及對復雜問題的適應性,已發(fā)展為一種實用、高效、魯棒性強的優(yōu)化技術,被廣泛應用于控制器設計和優(yōu)化中。比如,童春月等[3]利用遺傳算法進行控制參數優(yōu)化,實現(xiàn)雙旋翼多輸入多輸出系統(tǒng)PID控制設計;肖長詩等[4]利用遺傳算法優(yōu)化模糊控制器規(guī)則,有效提高四旋翼無人機在面對復雜干擾時的抗擾能力和控制精度;王文慶[5]、劉虹[6]等應用遺傳算法對PID控制參數進行整定,有效改善控制系統(tǒng)的性能指標。然而,基本遺傳算法也存在易過早收斂、陷入局部最優(yōu)以及搜索效率偏低等缺陷,不利于面對復雜問題的全局尋優(yōu)。
因此,本文提出拉丁超立方初始化種群、二元競賽法結合最優(yōu)個體保留、自適應動態(tài)交叉和變異等多種遺傳算法改進策略,并將其應用于四旋翼無人機串級PID姿態(tài)控制器整定優(yōu)化當中,通過與人工整定和基本遺傳算法整定的試驗結果對比,驗證了改進遺傳算法用于PID控制優(yōu)化的有效性和優(yōu)越性。
1? 四旋翼無人機姿態(tài)控制系統(tǒng)
面對空中飛行時各種不確定性干擾,姿態(tài)控制器的合理設計對保證四旋翼無人機穩(wěn)定飛行至關重要。傳統(tǒng)的單角度環(huán)PID控制方式難以滿足飛行姿態(tài)控制的精度和性能要求,因此,這里采用串級PID控制結構,外環(huán)采用角度P控制,內環(huán)采用角速度PID控制,以提高姿態(tài)系統(tǒng)的控制質量,增強無人機的抗干擾能力[7,8]。
俯仰、滾轉和偏航姿態(tài)均采用串級PID控制結構,如圖1所示,其原理如下:首先,將四旋翼無人機的當前姿態(tài)與期望姿態(tài)作差,轉化為誤差信號,經過外環(huán)角度P控制器運算后輸入到內環(huán)角速度PID控制器作為期望角速度;然后,將其與四旋翼無人機的當前角速度作差,誤差率又經過角速度PID控制器運算后求得各個電機的控制量;最后,將控制信號輸入至四個旋轉電機,改變電機轉速以調整整個系統(tǒng)的受力情況,實現(xiàn)對四旋翼無人機姿態(tài)的控制。
在仿真過程中,數字式PID控制表達式如下:
其中,U1、U2分別為角度、角速度控制器的輸出控制量,e1、e2分別為角度、角速度誤差,Kp1為角度環(huán)比例系數,Kp2、Ki、Kd分別為角速度環(huán)比例系數、積分系數和微分系數,T為仿真采樣時間間隔。
2? 基于改進遺傳算法的PID參數整定
2.1? 基本遺傳算法
遺傳算法(GA)是1962年由美國Michigan大學的Holland教授提出的模擬自然界遺傳機制和生物進化論而成的一種并行隨機搜索最優(yōu)化方法[9]。它將目標空間中的可能解視作群體中的一個個體或染色體,并進行編碼處理,通過對種群反復進行選擇、交叉、變異等遺傳操作,同時根據適應度函數對每個個體進行評估,依據優(yōu)勝劣汰、適者生存的進化規(guī)則,不斷優(yōu)化種群,直至找到滿足要求的最優(yōu)解。
基本遺傳算法(SGA)只使用基本遺傳算子,進化操作過程簡單,是遺傳算法的基本框架,但存在易過早收斂、陷入局部最優(yōu)以及搜索效率偏低等缺陷,因此,本文提出拉丁超立方初始化種群、最優(yōu)保留策略、動態(tài)交叉和變異多種改進方法,以提高基本遺傳算法的收斂性和搜索效率。
2.2? 改進遺傳算法
2.2.1? 拉丁超立方法初始化種群
在基本遺傳算法中,初始種群通過隨機選取產生,隨機性大,難以保證種群在解空間內均勻分布,進而影響種群多樣性。為此,引入拉丁超立方抽樣法(LHS)對初始種群進行試驗設計,保證以有限的個體獲得理想的覆蓋面,提高種群多樣性,進而增加收斂至最優(yōu)解的可能性。
2.2.2? 二元聯(lián)賽法與最優(yōu)保留策略
傳統(tǒng)的輪盤賭方法選擇誤差大,同時進化過程中種群優(yōu)秀個體容易遭到交叉、變異等因素的偶然破壞,因此,提出一種二元聯(lián)賽法結合最優(yōu)保留策略的選擇方法,即通過重復隨機選取當代種群中一對個體,并保留其中適應度大的個體,直至達到種群規(guī)模,然后將進化歷史過程中的最優(yōu)個體替代種群中的最差個體,最終形成父代種群。
2.2.3? 自適應動態(tài)交叉與變異
遺傳算法的交叉、變異用于產生新個體,增加種群多樣性,當交叉、變異概率選取不當時,會增加迭代次數,甚至使算法陷入局部最優(yōu)解的“早熟”現(xiàn)象[10]。基本遺傳算法利用經驗選取交叉、遺傳概率,這種方式有兩個缺點,一是人工選取,具有一定的盲目性,二是交叉、變異概率固定不變,未充分結合種群進化特性。
為此,提出自適應動態(tài)交叉、變異概率方法,根據種群適應度變化大致判斷收斂進程,并相應地動態(tài)調整交叉概率pc、變異概率pm。進化初期,種群中個體一般差異較大,較大的pc和較小的pm有助于加快收斂速度;進化中期,種群基本確定“最優(yōu)”進化方向,適中的pc和較大的pm有助于增加種群多樣性,避免過早陷入局部最優(yōu);而進化后期,種群個體趨于一致,較小的pc和較小的pm可以避免破壞種群,防止減緩收斂速度[11]。pc、pm計算公式為:
其中,k1、k2均為調整曲線平滑程度參數;pcmax、pcmin分別為交叉率的最大值和最小值,pmmax、pmmin分別為變異率的最大值和最小值;σ為當前種群的收斂進程,其計算公式為:
其中,( fmax - favg )為當前種群中個體最佳適應度值與平均適應度值之差,而( fmax - favg ) max為歷代種群中個體最佳適應度值與平均適應度值之差的最大值。
2.3? 改進遺傳算法優(yōu)化PID控制參數流程
姿態(tài)控制器三個通道均采用串級PID控制器,其優(yōu)化問題是在解空間內尋找一組最佳的Kp1、Kp2、Ki和Kd參數,使得整個響應動態(tài)過程中,系統(tǒng)誤差總體上最小。常用的誤差積分指標有誤差平方積分指標(ISE)、絕對誤差積分指標(IAE)、時間乘絕對誤差積分指標(ITAE)等,本文選用工程上常用的ITAE指標作為目標函數,用以判斷系統(tǒng)動態(tài)性能,其定義為[12]:
其中,e(t)為系統(tǒng)誤差,t為仿真時間。
利用改進遺傳算法優(yōu)化PID控制參數流程如下:
1)初始化種群:采用LHS法生成規(guī)模為N的初始種群,每個個體X均為一組PID優(yōu)化參數向量[Kp1 Kp2 Ki Kd],并采用二進制編碼;
2)計算適應度:將個體中PID參數賦值到控制系統(tǒng),計算得到個體適應度值,其中適應度函數定義為f = 1/j,其值越大,表示個體適應度越高,其參數對應的系統(tǒng)動態(tài)性能越好;
3)選擇:通過二元聯(lián)賽法的方式從種群中選擇適應度較高的N個個體,并將迄今為止最優(yōu)個體替換其中最差個體,形成父代種群;
4)交叉和變異:根據優(yōu)化收斂進程對父代種群中個體進行動態(tài)交叉、變異,進而產生N個新個體,組成新一代種群;
5)終止條件判斷:若達到最大迭代數G,則終止計算,輸出最大適應度個體作為最優(yōu)解,否則返回步驟2),繼續(xù)執(zhí)行優(yōu)化操作。
3? 仿真結果與分析
以階躍函數作為系統(tǒng)輸入,分別采用人工整定法、基本遺傳算法和改進遺傳算法對四旋翼無人機姿態(tài)控制系統(tǒng)PID參數進行優(yōu)化仿真分析。
設定遺傳算法種群規(guī)模N為30,最大迭代數G為40,基本遺傳算法中pc、pm分別為0.7、0.1;改進遺傳算法中k1、k2分別為12、0.15,pcmax、pcmin分別為0.9、0.6,pmmax、pmmin分別為0.15、0.08,另外,PID控制參數的優(yōu)化范圍通過經驗法確定。
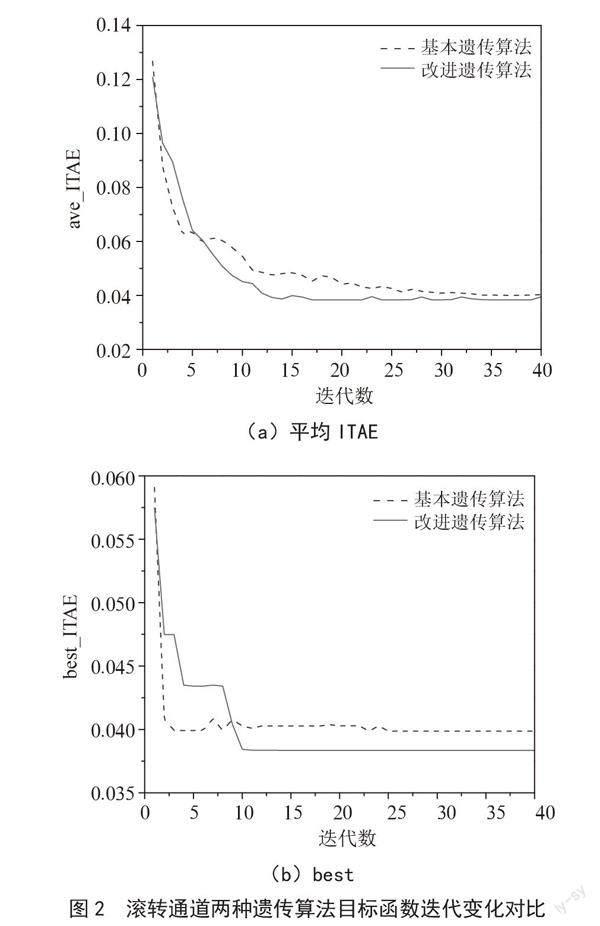
以滾轉通道PID參數優(yōu)化為例,對比兩種遺傳算法迭代過程中種群平均ITAE和最佳ITAE的變化,結果如圖2所示。可以看出,相較于基本遺傳算法,改進遺傳算法在第14代便已完成尋優(yōu)過程,收斂速度明顯加快,且最佳ITAE曲線呈階梯下降,最終結果也更小,表明該算法搜索效率更高,且能有效避免陷入局部最優(yōu),具有更強的全局搜索能力。
將三種方法整定的PID參數分別賦予四旋翼無人機姿態(tài)控制系統(tǒng),對比俯仰、滾轉、偏航三個通道的階躍響應曲線,如圖3~圖5所示。可以看出,三種方法的階躍響應曲線超調量均微小,但相較于人工整定法,采用兩種遺傳算法優(yōu)化后的控制系統(tǒng)階躍響應速度顯著加快,且改進遺傳算法表現(xiàn)更優(yōu),這也與表1中三種方法整定后俯仰角、滾轉角和偏航角階躍響應的ITAE指標相吻合。以俯仰角為例,在超調量差異微小的情況下,相較于人工整定法,基本遺傳算法和改進遺傳算法的階躍響應時間分別降低了43.6%和54.4%,而ITAE指標也相應地分別降低了58.4%和69.1%。
4? 結? 論
本文在基本遺傳算法的基礎上,引入LHS初始化種群、最優(yōu)個體保留、自適應動態(tài)交叉和變異等改進策略,目的在于提高初始種群的分布性,避免優(yōu)秀基因被破壞,同時根據收斂程度動態(tài)調整交叉、變異概率,始終保持明確的進化方向和恰好的收斂速度,使算法具有更強的全局搜索能力。利用其對四旋翼無人機姿態(tài)控制系統(tǒng)PID參數進行整定優(yōu)化,并與人工整定法和基本遺傳算法對比分析。結果表明,改進遺傳算法具有比基本遺傳算法更強的收斂性和全局搜索能力,利用其對PID參數整定優(yōu)化,相比人工整定法,能顯著提高四旋翼無人機姿態(tài)控制系統(tǒng)的動態(tài)性能。
參考文獻:
[1] ZHANG R,QUAN Q,CAI K-Y.Attitude control of a quadrotor aircraft subject to a class of time-varying disturbances [J].IET Control Theory & Applications,2011,5(9):1140-1146.
[2] 姚博文.四旋翼無人機高精度飛行控制算法研究及實現(xiàn) [D].哈爾濱:哈爾濱理工大學,2018.
[3] 童春月,尹平林,梁莉敏.基于遺傳算法的雙旋翼系統(tǒng)的PID控制器設計 [J].微機發(fā)展,2005(7):100-102.
[4] 肖長詩,毛貽漢,元海文,等.風擾條件下四旋翼無人機智能控制算法的設計與仿真 [J].計算機科學,2018,45(5):310-316.
[5] 王文慶,楊楠.基于改進遺傳算法的PID參數整定研究 [J].計算機與數字工程,2018,46(12):2603-2606+2610.
[6] 劉虹.應用改進遺傳算法進行PID控制器參數整定 [D].鎮(zhèn)江:江蘇大學,2006.
[7] 馮慶端,裴海龍.串級PID控制在無人機姿態(tài)控制的應用 [J].微計算機信息,2009(22):9-10+45.
[8] 烏仁別麗克.基于串級PID控制算法的四旋翼無人機控制系統(tǒng)設計與實現(xiàn) [D].上海:東華大學,2016.
[9] 陳國良.遺傳算法及其應用 [M].北京:人民郵電出版社,1996.
[10] 石彥華.基于改進遺傳算法的PID參數整定研究 [J].科技風,2012(3):42-43.
[11] 曳永芳,杜永清,行小帥.一種抑制早熟收斂的改進遺傳算法 [J].山西師范大學學報:自然科學版,2010,24(2):24-28.
[12] 吳麟,王詩宓.自動控制原理 [M].北京:清華大學出版社,2006.
作者簡介:陳俊東(1996.01—),男,漢族,江西上饒人,助理工程師,碩士研究生,研究方向:控制算法。
收稿日期:2023-03-17
