基于混雜控制算法的雙向DC-DC 變換器控制
2023-07-29 11:00:16李彥瑾李自成
自動化與儀表 2023年7期
關(guān)鍵詞:系統(tǒng)
李彥瑾,李自成
(武漢工程大學(xué) 電氣信息學(xué)院,武漢 430205)
雙向DC-DC 變換器在電機驅(qū)動系統(tǒng)、列車供電系統(tǒng)、太陽能發(fā)電系統(tǒng)、新能源汽車系統(tǒng)等場合有廣泛的應(yīng)用[1]。為提高雙向DC-DC 變換器的工作效率、動態(tài)響應(yīng)速度、功率密度和可靠性等,國內(nèi)外學(xué)者對雙向DC-DC 變換器開展了深入研究,提出了新的變換器拓?fù)浜透咝У目刂撇呗浴?/p>
文獻[2]使用峰谷值雙門限控制方式,優(yōu)化了半橋DC-DC 變換器中反向電流增大的問題,但未考慮其混雜特性;文獻[3]建立了高升壓Boost 變換器的混雜系統(tǒng)模型,推導(dǎo)了其在CCM 模式下運行的邊界條件,但未考慮DCM 模式;文獻[4]提出一種新型的非隔離型雙向多端口DC-DC 變換器,使用比例積分控制器調(diào)節(jié)負(fù)載電壓,適用于混合能源系統(tǒng);文獻[5]基于三相交錯雙向DC-DC 變換器提出一種基于系統(tǒng)模型與能量守恒定律的電流環(huán)控制器,實現(xiàn)電流連續(xù)與斷續(xù)模式的統(tǒng)一控制;文獻[6]針對全橋DC-DC 變換器提出一種改進的雙重移項控制以減小電流應(yīng)力、提高轉(zhuǎn)換效率;文獻[7]提出一種由電池和超級電容器組成的雙向DC-DC 變換器充放電控制方案,提高電力系統(tǒng)的動態(tài)性能并延長電池壽命;文獻[8]提出一種具有寬增益特性的雙向DC-DC變換器已改善儲能系統(tǒng)中功率波動過大的問題;文獻[9]將混合控制用于雙向DC-DC 變換器,控制電池的功率進行調(diào)峰;文獻[10]對雙向DC-DC 變換器MLD模型的建模方法進行了詳細分析,且對模型的最優(yōu)和預(yù)測控制進行了研究,但模型表達式較復(fù)雜。
綜上,本文提出了一種基于混雜系統(tǒng)理論的雙向DC-DC 變換器控制算法。在Matlab/Stateflow 平臺進行仿真,結(jié)果顯示該控制算法控制性能良好。
1 雙向DC-DC 變換器混雜系統(tǒng)建模
1.1 混雜系統(tǒng)理論
設(shè)X∈Rn是連續(xù)狀態(tài)空間,Q={q1,q2,…,qN}代表有限離散狀態(tài)集合,q∈Q 表示系統(tǒng)中的開關(guān)元件的導(dǎo)通與關(guān)斷。根據(jù)上述假設(shè),當(dāng)系統(tǒng)中存在開關(guān)器件、線性元件、電壓源與電流源時,可以采用不同的狀態(tài)方程來建立系統(tǒng)模型[11]:
其中有:x∈X,Aq∈Rm×n,Bq∈Rn×1。
混雜自動機模型M 可由如下集合來表示:
1.2 混雜系統(tǒng)建模
以非隔離型雙向半橋DC-DC 變換器為研究對象,其拓?fù)淙鐖D1 所示。當(dāng)其工作在Buck 模式時,開關(guān)管Q1動作,Q2關(guān)斷,能量由電源側(cè)流向負(fù)載側(cè);當(dāng)其工作在Boost 模式時,開關(guān)狀態(tài)與能量流動方向與Buck 模式相反。
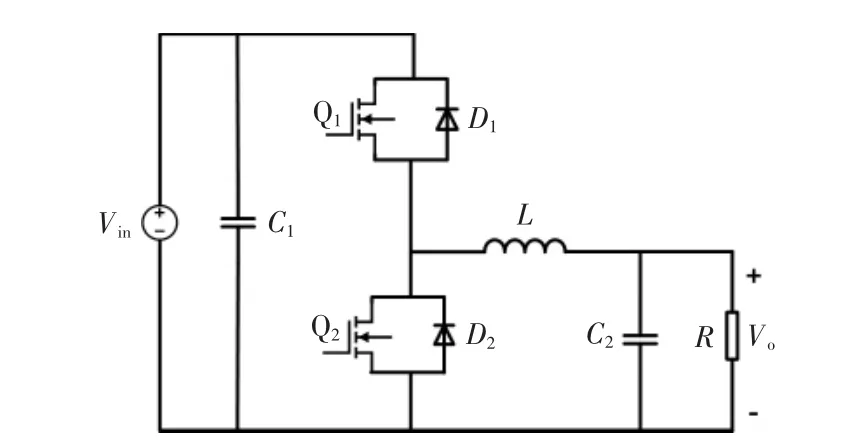
圖1 雙向半橋DC-DC 變換器拓?fù)銯ig.1 Half-bridge bidirectional DC-DC converter topology
混雜自動機由2 部分組成,上部分為離散狀態(tài)機,下部分為連續(xù)狀態(tài)機。邊界條件G 定義為處于模式i 時,從模式i 向模式j(luò) 轉(zhuǎn)換的條件。對于電感電流連續(xù)情況下,需要確定G12和G212 個邊界條件,電感電流斷續(xù)模式下需要確定G21、G22和G233 個邊界條件。混雜自動機離散狀態(tài)模型如圖2所示。
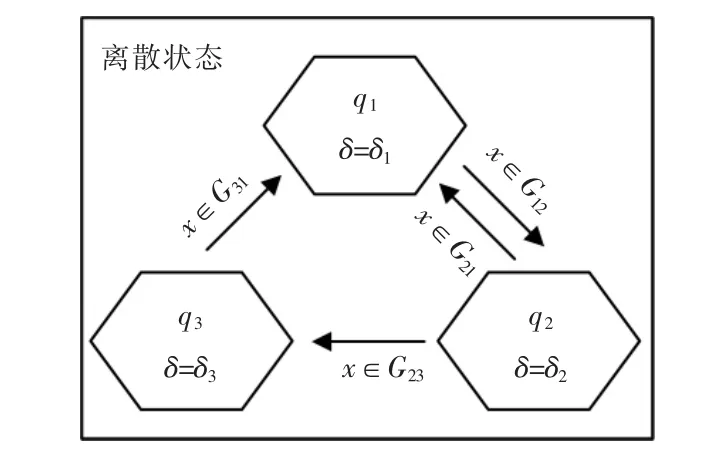
圖2 混雜自動機離散狀態(tài)模型Fig.2 Discrete state model of hybrid control
2 控制算法研究
雙向DC-DC 變換器工作于電感電流連續(xù)(CCM)模式與電感電流斷續(xù)(DCM)模式時的電流波形如圖3 和圖4 所示[12]。
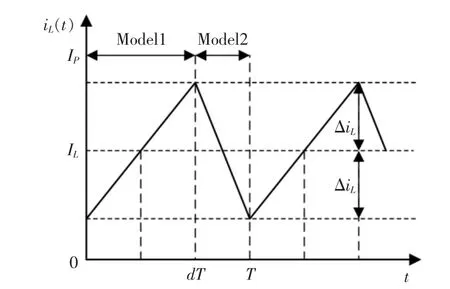
圖3 CCM 模式下的電感電流波形Fig.3 Inductive current waveform in CCM mode
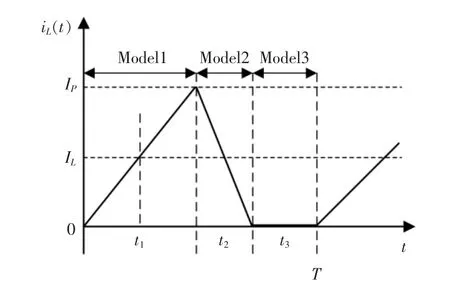
圖4 DCM 模式下的電感電流波形Fig.4 Inductive current waveform in DCM mode
2.1 Buck 工作方式的控制算法
Buck 變換器工作于CCM 模式時,根據(jù)圖3 可得時間T 內(nèi)電感電流的變化為
式中:d 為占空比。根據(jù)安秒平衡,電容紋波峰值為
可得電感電流紋波為
則可確定邊界條件G12與G21為
Buck 變換器工作于DCM 模式時,根據(jù)圖4 可得,在時間t1內(nèi),電感電流從0 上升到峰值:
可得Buck 工作方式下電路在DCM 模式下3 種工作模態(tài)切換的邊界條件為
當(dāng)t1+t2=T 時,Buck 變換器處于臨界模式,臨界電阻為
即當(dāng)R<Rc時,Buck 變換器工作于CCM 模式;當(dāng)R=Rc時,其工作于臨界模式;當(dāng)R>Rc時,其工作于DCM 模式。
2.2 Boost 工作方式的控制算法
Boost 變換器工作于CCM 模式時,時間T 內(nèi)電感電流的變化為
可以確定Boost 變換器在電感電流連續(xù)模式下的邊界條件:
Boost 變換器工作于DCM 模式時,在時間t1內(nèi),電感電流上升,輸出電壓下降,當(dāng)t=t1時,電感電流達到峰值:
在t2時間內(nèi),電感電流表達式為
根據(jù)能量守恒定律得:
綜上所述,Boost 變換器在DCM 模式下的邊界條件為
當(dāng)t1+t2=T 時,Boost 變換器處于臨界模式,臨界電阻為
3 仿真與分析
基于混雜自動機模型離散部分及控制器設(shè)計包括仿真驗證都需要用到Matlab 中的Stateflow 工具,它是一種基于邏輯理論的建模與仿真分析工具,可以實現(xiàn)事件驅(qū)動下的電路邏輯轉(zhuǎn)換。本文利用Stateflow 工具對雙向DC-DC 變換器進行仿真,驗證了所述算法的準(zhǔn)確性。
3.1 雙向DC-DC 變換器混雜系統(tǒng)仿真
雙向DC-DC 變換器的電路參數(shù)如表1 所示。

表1 雙向DC-DC 變換器電路參數(shù)Tab.1 Parameters of bidirectional DC-DC converter
系統(tǒng)仿真輸出電壓波形如圖5 所示,電感電流波形如圖6 所示。
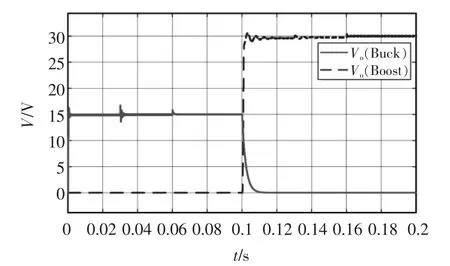
圖5 輸出電壓波形Fig.5 Output voltage waveform
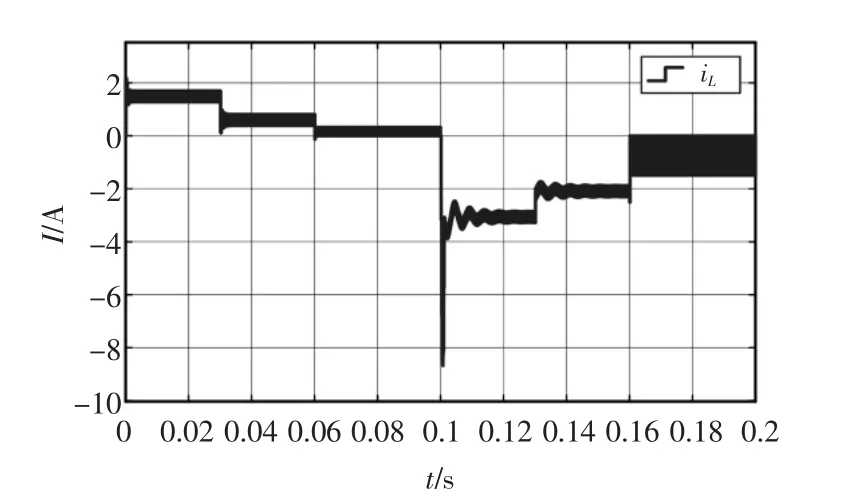
圖6 電感電流波形Fig.6 Inductor current waveform
當(dāng)t≤0.1 s 時,雙向DC-DC 變換器工作在正向Buck 模式,從圖6 可以看出,此時電感電流為正。在此過程中,當(dāng)t≤0.03 s,R=10 Ω 時,系統(tǒng)處于CCM模式,在模態(tài)q11與q12之間切換;當(dāng)0.03 s≤t≤0.06 s,R=28 Ω 時,系統(tǒng)處于電感電流臨界狀態(tài);當(dāng)0.06 s≤t≤0.1 s,R=100 Ω 時,系統(tǒng)處于DCM 模式,在模態(tài)q11、q12、q13之間切換。
當(dāng)t≥0.1 s 時,雙向DC-DC 變換器工作在反向Boost 模式,此時電感電流反向為負(fù)。在此過程中,0.1 s≤t≤0.13 s,R=20 Ω 時,系統(tǒng)處于CCM 模式;當(dāng)0.13 s≤t≤0.16 s,R=112 Ω 時,系統(tǒng)處于電感電流臨界狀態(tài);當(dāng)t≥0.16 s,R=150 Ω 時,系統(tǒng)處于DCM模式。
從圖5 輸出電壓波形可以看出,輸出電壓在Buck模式下穩(wěn)定在15 V,Boost 模式下穩(wěn)定在30 V。雙向DC-DC 變換器運行在2 種工作方式時均可在CCM與DCM 模式間切換,負(fù)載跳變時該控制算法都有較好的控制效果,使輸出電壓穩(wěn)定在期望值,且開關(guān)頻率穩(wěn)定,不隨負(fù)載變化。
3.2 混雜控制算法與PI 控制算法仿真對比
雙向DC-DC 變換器工作在Buck 與Boost 方式時混雜控制算法與PI 控制算法的輸出電壓波形,如圖7 和圖8 所示。從圖7 和圖8 中可以看出,在電路參數(shù)相同的情況下,使用PI 控制算法的電壓閉環(huán)控制電壓超調(diào)量較大,穩(wěn)定后電壓紋波較大,在1 V左右。而使用混雜控制算法的輸出電壓超調(diào)量很小,穩(wěn)定后電壓紋波可以控制在0.2 V 內(nèi),滿足控制要求。
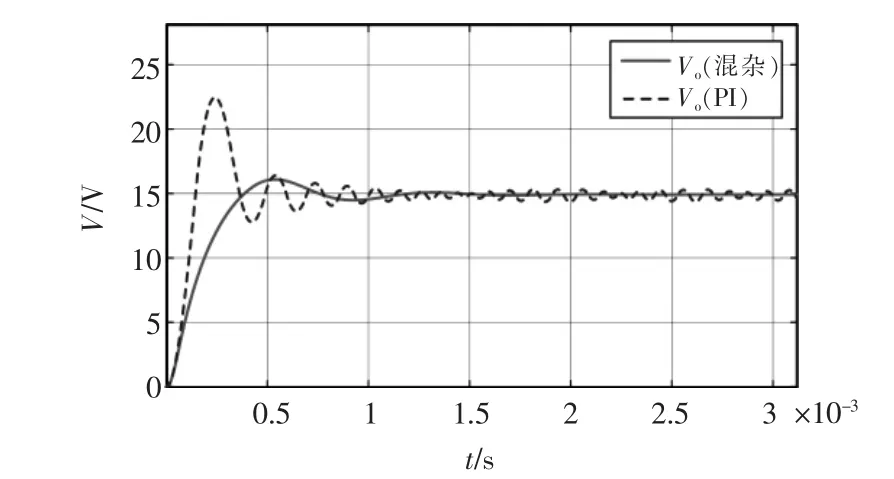
圖7 Buck 工作方式混雜控制與PI 控制輸出電壓波形Fig.7 Output voltage waveform of hybrid control and PI control in Buck mode
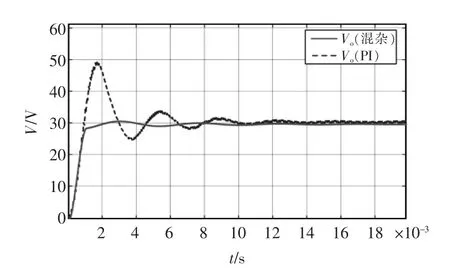
圖8 Boost 工作方式混雜控制與PI 控輸出電壓波形Fig.8 Output voltage waveform of hybrid control and PI control in Boost mode
4 結(jié)語
本文基于雙向DC-DC 變換器的狀態(tài)方程建立了混雜自動機模型,并設(shè)計了電感電流連續(xù)與斷續(xù)模式統(tǒng)一控制算法。從Matlab/Simulink 仿真結(jié)果可以看出,雙向DC-DC 變換器不論在Buck 或Boost模式,該控制算法都可以實現(xiàn)電流連續(xù)與斷續(xù)模式下變換器的穩(wěn)定運行,可快速準(zhǔn)確抑制負(fù)載擾動。最后通過與PI 控制進行仿真對比,證明了所述混雜自動機模型的高效性與準(zhǔn)確性,具有重要的現(xiàn)實意義。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
