切削加工過程中顫振在線監測研究綜述
2023-07-29 03:04:08李益文鄧朝暉劉濤卓榮錦李重陽呂黎曙
航空學報 2023年11期
李益文,鄧朝暉,劉濤,卓榮錦,李重陽,呂黎曙
1.湖南科技大學 機電工程學院,湘潭 411201
2.華僑大學 制造工程研究院,廈門 361021
3.湖南科技大學 難加工材料高效精密加工湖南省重點實驗室,湘潭 411201
近年來,航空航天裝備朝著大型化、輕量化和精密化方向發展,其工業產品中的低剛性結構件(薄壁件、細長軸等)和低剛性工藝系統結構件(深孔、窄槽等)被廣泛運用[1]。由于此類結構件在切削加工過程中極易發生顫振[2-5],而顫振是切削加工系統在非周期性外部激振力的連續作用下產生的一種強烈自激振動,受其時變特性和系統結構復雜性的影響難以得到控制[6],嚴重影響了工業產品的加工質量和加工效率,于是對切削加工過程中的顫振監測變得至關重要。傳統的離線檢測方法需要停機,導致了效率低和無法實時反饋機床加工狀態信息等問題[7],因此對切削加工顫振在線監測技術開展研究勢在必行。
顫振在線監測,即在充分利用計算機網絡技術、傳感器技術和數據采集技術的基礎上,將加工過程的數據實時傳輸到監測中心的計算機中進行處理,以實現機床狀態的在線識別,將極大地提升工業生產效率[8]。顫振在線監測主要包括顫振數據采集、在線特征提取以及顫振識別三大任務,然而目前顫振在線監測的工業運用仍不成熟,主要存在以下問題尚未解決:①數據采集受機床系統差異、傳感器性能以及信號的選擇與融合等因素的制約;②顫振特征的手動選擇、自動提取以及有機融合仍缺乏良好的理論支撐;③現有的顫振識別算法只能針對特定情況,通用且魯棒的顫振識別模型暫不具備。
改譯:During the Yongzheng reign,the nine-peach design was commonly seen on the famille-rose ware such as globular vases,olive-shaped vases and plates that are decorated with branches that extend from the outside into the bowl.
如何有效解決上述問題,以實現機床的高效、高質量加工,是顫振在線監測技術真正應用于工程實際的關鍵。為此,對顫振在線監測的三大任務的研究現狀進行深入歸納與分析,可為未來顫振在線監測的研究方向和技術突破提供指導。
1 顫振數據采集技術
顫振在線監測的第一要務須完成機床加工狀態信息的采集,目前已有的數據采集形式主要有[9]:①外接傳感器數據采集;②基于可編程邏輯控制器(Programmable Logic Controller,PLC)數據采集;③機床通訊接口數據采集。
思維能力的訓練和思維品質的提升是歷史課教學的一項重要任務,教師應在課堂教學的各個環節中有意識地滲透歷史思維訓練,尋找適當的教學策略,激發并維持學生的思維動力,發揮學生的潛能,讓學生在具體的情境體驗中感悟歷史,經歷真實的思維過程,完成有效的思維活動,交流思維成果,進而提升思維品質。
機床在加工過程中會產生各種形式的物理信號,究其原因是動態切削力所導致。動態切削力會使得系統的振動頻率、電機電流發生相應變化,因此通過附加相應傳感器可檢測力、加速度、聲發射、電流、功率等信號[10-14]。另外,振動頻率的變化會產生相應的聲音信號,利用麥克風傳感器同樣可完成數據采集[12,15-17]。采用單一傳感器進行數據采集會存在特征漏檢的現象,而不同的信號具備不同的特性,將各單一傳感器進行合理組合以實現多傳感融合,可減少信號間的冗余和干擾產生的影響,獲得更加精確的顫振監測結果[16-17]。
表4 總結了常用于顫振識別的各類有監督學習算法的優缺點和應用情況。目前有監督顫振識別技術憑借其高精度、高魯棒性等特點仍然是大多學者的首選,但有監督學習嚴重依賴樣本標簽,無法真正實現智能化顫振在線監測。
相較于前二者數據采集方法,機床通訊接口采集方式在數據采集和傳輸方面優勢更明顯,其數據采集方式主要有[25]:基于RS232 串口采集[26]、基于DNC 接口采集[27]和基于OPC 規范和網絡接口采集[28-29];其中RS-232 串口采集適用于短距離信號實時傳輸。DNC 接口采集可實現機床內部信息的實時采集和遠程控制,但存在受機床系統限制的問題。基于OPC 規范和網絡接口數據采集方式在基于專業的軟硬件條件下,可實時采集大多數機床內部信息。然而通訊接口采集通常會受到機床封閉性的影響,開放式數控系統接口采集則可通過外部調用函數,實現外部系統與數控機床的聯網和信息讀寫,打破了設備之間的信息交互壁壘[30],為實現數據平臺集成化以及顫振在線監測與抑制協同運作創造了條件。胡磊[31]采用開放式數控系統接口采集方式實現了切削加工數據的共享,并進一步提高了切削加工過程中的穩定性。單蔣楠[32]通過該采集方式完成了顫振數據采集和狀態監測,并對二者進行了實時性評估。
表1 總結了上述顫振數據采集方法及優缺點,其中開放式數控系統基于高性能計算機軟硬件平臺,將成為未來機床系統的發展趨勢[33],因此基于該系統的通信接口采集方式將成為未來數據采集的重要發展方向。

表1 顫振數據采集方法的優缺點及應用總結Table 1 Summary of advantages,disadvantages and application of chatter data acquisition method
2 顫振特征提取技術
振動信號采集完成后,需對數據進行特征提取以獲取關鍵顫振特征。而特征和特征提取技術的選擇是影響顫振監測效率的關鍵,目前主要通過時域分析、頻域分析及時頻域分析法來實現。
2.1 時域分析方法
時域分析以時間為自變量描述信號變化過程,時域特征提取是通過時域分析法對采集的原始信號進行各種直觀分析,以獲取相應時域特征的方法[34]。時域特征主要分為有量綱和無量綱指標,筆者對該兩類顫振指標近10 年的使用頻率進行統計,如圖1 和圖2 所示。由于各類特征擁有不同的敏感性和穩定性,選擇合適的特征可為在線顫振監測提供更高的精確性。
2012年11月2日百雀羚以7 000萬元拿下2013年《中國好聲音》第二標王,與兩億元冠名好聲音的加多寶涼茶共同上演了本土品牌力壓國際大牌的驚人一幕。在隨后的“雙11”上同樣表現驚人——截至下午15:00左右百雀羚天貓旗艦店當天銷售額達到1 500多萬元,昭示著這個中國老字號化妝品百雀羚已經實現浴火重生鳳凰涅槃。
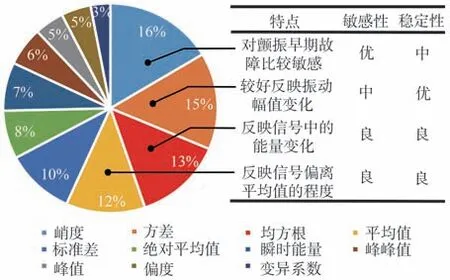
圖1 有量綱指標使用頻率餅狀圖Fig.1 Pie chart of dimensional indexes usage frequency

圖2 無量綱指標使用頻率餅狀圖Fig.2 Pie chart of non-dimensional indexes usage frequency
在有量綱指標中,峭度使用頻率較高,Liu等[35]根據峭度值與信號幅值之間強相關性的特點,實現了車削顫振識別。Liu 等[36]采用快速譜峭度圖解決了低信噪比信號無法確定顫振位置的問題。Wang 等[37]利用峭度概率密度函數完成了對振動信號沖擊特性的評估。由于單個指標并不能同時兼顧良好的敏感性和穩定性,峭度往往與平均值、方差或均方根結合使用[38-40]。該3 種特征穩定性良好,Schmitz 等[41]將方差作為顫振指標,并建立了方差與銑削穩定性的相關性關系。謝鋒云[42]將模態函數的均方根作為輸入,通過神經網絡模型實現顫振在線監測。Ye 等[43]將信號中的每一段均方根值組成均方根序列,通過快速變異系數(Coefficient of Variation,CV)算法提取均方根序列的CV 值作為顫振特征,從而提升了顫振監測效率。針對不同的使用場合,將不同特征組合使用,可取得更佳的顫振監測效果,王民等[44]利用了頻段能量百分比計算均值和方差的方法,使得磨削顫振監測具備了更高的計算效率。Chen 等[45]利用峰值靈敏度高以及標準差較好的穩定性的特點,實現了96%的顫振監測準確率。
信號表征中,有量綱指標敏感性較好,而無量綱指標在穩定性上則更勝一籌,因此通常將兩類指標結合使用。Lamraoui 等[46]選擇了方差、峭度、峰值因子以及脈沖因子等9 個特征,利用相對熵對特征進行排序再優選,提升了顫振識別的精確性與魯棒性。由于顫振產生的本質是能量變化所引起,能量熵可表征信號能量分布的不確定度,因而被廣大學者采用[47-52]。各熵特征優勢的差異會獲得不同的監測效果,如Ji 等[53]利用功率譜熵可反映信號的頻率特征的特點,開發了銑削顫振監測系統。Nair 等[54]根據排列熵(Permutation Entropy,PE)具有計算效率高、抗噪能力強等特點,實現了系統動態變化的有效檢測。PE 只能從單一尺度表征故障信息,任靜波等[13]則采用多尺度排列熵(Multi-scale Permutation Entropy,MPE)有效辨識了銑削顫振狀態,該特征可兼顧PE 的優勢,同時能從不同尺度解讀顫振信息。在此基礎上,Li 等[55]采用MPE 和多尺度功率譜熵(Multi-scale Power Spectral Entropy,MPSE),增強了顫振在線監測的魯棒性。
時域分析方法憑借其直觀、簡單及預定參數少等特點被廣大學者所采用,但該方法存在下列問題[56]:①所測原始信號易受實際工況干擾從而導致分析偏差;②難以反映信號所蘊含的全部信息,不易準確掌握信號的本質構成,易使得顫振監測精確性下降。此外時域分析中的顫振特征選擇仍然是經驗的,缺乏較好的理論指導。
2.2 頻域分析方法
3)聚合經驗模態分解法
Cuka 等[57]將信號通過Babor 濾波器組分解為重要的頻率分量后,利用Teager-Kaiser 能量算子(Teager-Kaiser Energy Operator,TKEO)追蹤瞬時頻率和振幅變化,可高效、準確地識別切削加工的穩定性,提高了顫振識別的精確性。為克服TKEO 易受到噪聲干擾的問題,汪曉珊[58]和Dong[59]等采用Vold-Kalman 濾波器(Vold-Kalman Filter,VKF)提取各個信號分量,同時利用基于頻譜集中系數的瞬時顫振頻率估計方法,提高了顫振識別的魯棒性。Chen 等[60]采用了一種自適應總體最小二乘–旋轉矢量不變技術(Total Least Squares-Estimation of Signal Pa‐rameters via Rotational Invariance Techniques,TLS-ESPRIT)進行顫振頻率分量譜估計,開發了一種由信號預處理、顫振頻率估計和顫振檢測組成的在線顫振監測系統,可自適應確定顫振諧波個數,并具有良好的抗干擾性,如圖3所示。

圖3 基于TLS-ESPRIT 在線顫振監測流程圖Fig.3 Flow chart of online chatter monitoring based on TLS-ESPRIT
上述兩種算法盡管有較強的抗噪能力,但存在設置參數較多以及計算復雜度偏高等問題,Liu 等[61]提出的一種基于頻域搜索(Frequency Domain Search,FDS)的銑削顫振識別算法則具有計算簡便、實時性良好等特點,該算法在特征提取前不需要較多復雜信號進行信號處理,可直接提取顫振頻率進行機床顫振識別。Wang 等[62]將顫振頻率構造成稀疏字典矩陣,再利用正交匹配追蹤(Orthogonal Matching Pursuit,OMP)算法進行顫振頻率提取,縮短了信號重構時間。然而OMP 算法仍需預先設置稀疏度,針對該問題,竇慧晶等[63]提出了一種改進稀疏度自適應匹配追蹤算法,通過對步長大小進行自適應調整,從而高效逼近信源稀疏度。顫振頻率會受到加工條件和機床動態特性變化的影響,從而出現顫振頻移現象,Liu 等[64]采用歸一化譜熵和對數譜距離兩種指標解決了該問題。
為提高神經網絡模型顫振在線識別精確性,Abul 等[12]采用多種深度學習框架,建立了基于深度神經網絡(Deep Neural Network,DNN)的顫振監測系統。Tran[98]和Sener[99]等均提出了基于深度卷積神經網絡(Deep Convolutional Neural Network,DCNN)和WT 的顫振識別架構,文獻[99]將切削參數與連續小波結合使用,使得DNN 擁有更好的分類性能。此外,有部分學者[100-102]結合彈性反向傳播算法、磁細菌優化算法及遺傳算法等,提高了人工神經網絡(Artifi‐cial Neural Network,ANN)及DNN 的全局搜索能力以及迭代效率,提高了在線顫振識別的實時性。由于顫振的發生是短暫的,難以獲得有效的顫振數據樣本,利用神經網絡進行顫振監測的優勢并不十分顯著。

表2 顫振頻率提取相關算法總結Table 2 Summary of relevant algorithms for chatter frequency extraction
2.3 時頻域分析
顫振在線監測的關鍵在于對早期顫振信號的實時、準確監測,而顫振早期沖擊能量微弱,信號易被噪聲淹沒,僅靠時域和頻域分析方法,難以準確判斷顫振的產生,而時頻域分析能從時間和頻率兩個方面同時解讀信號中包含的信息,可提高其分析精度。幾種常用的時頻域信號處理方法如下所述。
1)小波變換法
政治參與理論自然是依據我國的法律以及實際發展情況而形成的,指導我國公民進行政治生活也是遵照“依法參與”的原則,公民的政治參與需要以法律為基礎,為自己一切政治活動的準繩,以此來科學、合理地進行政治生活的參與,其稱之為合法參與。
短時傅里葉變換(Short Time Fourier Trans‐form,STFT)通過加入固定窗函數的方式完成局部信號的頻譜分析[65-66],但同時會導致自適應性的缺乏以及非平穩信號處理效果不佳等問題[67]。小波變換(Wavelet Transform,WT)法則通過設置時間窗和頻率窗寬窄的方式,可實現對高頻和低頻信號的分析[68],適合探測信號中的瞬態反常現象及易被忽略的信號特征,實現了STFT 優缺點的繼承與彌補。Wang 和Liang[69]提出了可適用于不同工藝的小波變換模量顫振指標,并采用小波變換模極大值(Wavelet Transform Modu‐lus Maxima,WTMM)檢測信號中的奇異點和瞬態現象。Yuan 等[70]提出了一種基于小波相干函數的顫振檢測方法,該方法在顫振早期的信號分析中表現良好。然而WT 僅對低頻信號分解效果顯著,小波包變換(Wavelet Packet Trans‐form,WPT)則解決了傳統WT 對高頻信號分解存在分辨率差的問題。Yao 等[71]和Tao 等[49]采用WPT 處理信號中的高低頻成分,利用局部離群因子(Local Outlier Factor,LOF)和PE 特征分別實現了銑削和鉆削顫振實時監測,圖4 為基于RWPEE 與LOF 的顫振識別方法。

圖4 基于RWPEE 與LOF 的顫振識別方法Fig.4 Method of chatter identification based on RWPEE and LOF
2)經驗模態分解法
WPT 的特征提取受基函數、分解層數等因素的影響,限制了顫振監測效率。經驗模態分解(Empirical Mode Decomposition,EMD)法則無需參數設置,便可將信號自適應地分解為多個固有模態函數(Intrinsic Mode Function,IMF),并使振動信號的時頻變化規律充分體現,彌補了WT 和STFT 在分析非平穩信號時的不足。有部分學者[35,72-73]利用EMD 在車削和銑削加工中完成了對加速度和電流信號的分解,并實現了顫振的在線監測與早期識別。另外Shrivastava 和Singh[74]利用EMD 良好的噪聲處理能力,從而建立了刀具顫振與加工參數的相關性關系,為切削加工預測出穩定的加工區域提供了策略。
由于切削加工過程通常所采集的信號并不是純白噪聲,因此EMD 處理信號時會存在部分時間尺度丟失的問題,從而產生模態混疊,使得IMF 分量失去了分解的物理意義。為此Liu 等[75]提出了EMD 與WPT 相結合的方式用于在線顫振特征提取,其中EMD 對信號進行分解,WPT對第一次重構信號進行處理。
頻域分析可將頻率域內的原始信號分解為幾種簡單信號的疊加,并完成信號中敏感頻率成分的識別和分離,彌補了時域分析的不足。當顫振發生時,信號的主頻會向加工系統的固有頻率頻段轉移,而頻域分析可篩選出加工頻率以及顫振頻率頻帶內的信號,據此,通過頻域分析提取顫振頻率的方式可實現顫振監測。
聚合經驗模態分解(Ensemble Empirical Mode Decomposition,EEMD)法可通過抵消信號中的白噪聲的方式,顯著改善模態混疊[76]。Fu等[77]以及Shrivastava 和Singh[78]均通過實驗比較了EMD 和 EEMD 兩種信號處理技術的適用性,由于EEMD 可極大地增強IMF 的窄帶特性,因此可顯著緩解模態混疊,如圖5 所示;文獻[77]通過基于EEMD 和能量聚合特征的Hilbert-Huang變換實現了顫振前兆信息的有效檢測。由于信號中的白噪聲無法完全抵消,殘余白噪聲仍會影響分析結果,Shrivastava 和Singh[79]則采用了Teager 濾波器對經EEMD 分解后的IMF 進行處理,清除了IMF 中殘留的噪聲污染。

圖5 EMD 與EEMD 的信號處理對比[77]Fig.5 Signal processing comparison between EMD and EEMD[77]
但是,EEMD 在抑制模態混疊時,還存在較大缺陷[80]:①信號中所添加的白噪聲幅值須選擇合適,較小或較大的幅值分別會造成模態混疊抑制效果差以及計算量急增的問題;②信號分解時會出現非標準IMF 的可能以及模態分裂問題。
4)局部均值分解法
為緩解EMD 和EEMD 中運算效率低及模態混疊等問題,Smith[81]介紹了一種通過除法運算獲取乘積函數(Product Function,PF),以使迭代次數大大減少的方法—局部均值分解(Lo‐cal Mean Decomposition,LMD)法。LMD 可用來解調調幅和調頻信號,能自適應地將信號分解成一系列PF,并且PF 的瞬時幅值和頻率可以直接從包絡信號和調幅信號中獲得[82-83]。由于LMD 的優勢明顯,Gupta 等[84-86]采用了該算法分析車削過程的聲音信號,在結合均方根、峰峰值以及絕對平均值時,取得了良好的顫振識別準確率。
但LMD 為遞歸分析算法,且在步長選擇不當時,仍會出現與上述模態分解方法相同的問題,Mishra 和Singh[87]則采用了樣條局部均值分解(Spline Based Local Mean Decomposition,SBLMD)算法,改善了傳統LMD 的固有缺陷,并開發了基于SBLMD 銑削顫振在線監測系統,如圖6 所示。

圖6 基于SBLMD 的顫振實時監測系統Fig.6 Real-time monitoring system of chatter based on SBLMD
2.3 不同液體管理方案對24 h液體復蘇達標率的影響 實驗組6 h及24 h液體復蘇達標率分別為67.67%和83.33%,相較于對照組的20.00%和44.00%,實驗組達標率更高,兩組間差異有統計學意義(P<0.05),見表2。
變分模態分解(Variable Mode Decomposi‐tion,VMD)法則屬于非遞歸分析法,其本質是具有自適應特性的維納濾波器組合,具備高效、精準的信號處理能力,可明顯緩解上述方法中存在的固有缺陷,因此VMD 在特征提取方面優勢顯著。如Li 等[88]提出了一種基于VMD 和功率譜熵差銑削顫振早期監測方法,可有效監測銑削早期顫振情況。Mou 等[50]比較了基于變分模態分解能量分布和變分模態分解能量熵的兩種薄壁銑削顫振監測方法,前者具有更高的靈敏度和穩定性。然而VMD 須提前確定模態數K和懲罰因子α,針對該問題,Yang 等[89]利用模擬退火算法優化VMD 的參數K和α,在連續顫振和間歇顫振中均具有良好的顫振在線監測效果。Liu 等[90]結合粒子群算法可實現最優參數的自動獲取。Zhang 等[91]提出一種快速迭代變分模態分解方法(Fast Iterative Variational Mode Decomposi‐tion,FI-VMD),解決了參數設定問題,如圖7 所示。Liu 等[51]根據顫振信號與峭度值高相關性的特點,提出了基于峭度的VMD 參數自動選擇方法,可通過確定最大峭度值從而確定最優參數。Liu 等[92]采用了快速局部平均經驗模態分解,該方法可高效、自適應地計算出模態參數。
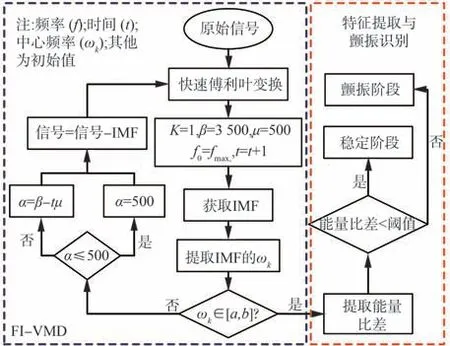
圖7 基于FI-VMD 的參數獲取與顫振識別Fig.7 Parameter acquisition and chatter identification based on FI-VMD
目前,顫振特征提取技術中還未能同時兼顧顫振提前預警和精確預警。針對不同的切削加工過程,須采用合適的特征提取技術,可獲得適用于不同加工過程的敏感特征量。表3 總結了上述信號處理方法的優缺點及適用范圍,可為下一步顫振識別的精確性與魯棒性奠定良好的基礎。

表3 顫振特征提取方法總結Table 3 Summary of chatter feature extraction algorithm
3 顫振識別技術
顫振識別過程是對切削加工狀態的分類過程,是顫振在線監測的最后一步,也是最關鍵一步。目前,常用的顫振識別方法有閾值法和模式識別法[93],由于顫振伴隨著頻率和能量的再分配,因此通過提取顫振頻率后并結合特殊指標(能量指標、熵特征等)的方式可通過閾值法實現顫振識別,在本文頻域分析中有具體闡述。另外有較多學者[69,91,94-97]為提高閾值法在顫振識別中的精確性,分別提出了參數獲取方法、相對閾值算法、顫振信號增強方法以及頻率消除算法等方法,閾值法雖能迅速判斷工件加工狀態,但難點在于如何確定一個自適應閾值。
當前依靠模式識別法實現切削加工顫振識別仍然普遍,模式識別法是將采集的原始數據對機器學習模型進行訓練,然后對數據進行分類的過程。下文從有監督和無監督學習兩個方面來闡述模式識別的特點和應用情況。
徐州90年代時的商業設施布局以沿路布置為主,集中分布在淮海路沿線、中山路沿線以及主要干道交叉口,整體形成沿街為市的空間布局形態;隨后2000年開始商業設施在原有的基礎上進行延伸擴大,在中山路與淮海路形成塊狀節點,同時,結合戶部山、礦業大學等形成多處商業設施,并在大郭莊機場西南側、沿三環東路、荊馬河北側等地區形成大型市場用地;現如今,隨著徐州經濟的快速發展,商業綜合體主要集中在老城區,老城區商業設施布局從帶狀向面狀發展演變,新城區商業綜合體、銅山片區商業綜合體以及城東新區商業中心等商圈也都應勢而起。如圖1所示。
5)變分模態分解法
3.1 有監督顫振識別技術
有監督學習是通過利用若干有標記的樣本,對相關機器學習進行有指導性地訓練,從而得到一個分類模型,利用該模型可對未知標簽的數據完成分類。此類算法可充分利用標記信息實現方向性學習,因此具備良好的顫振識別準確率。
利用頻域分析獲得信號中的顫振頻率信息,并結合相應的顫振特征,可通過顫振閾值檢測的方式實現加工狀態識別,相較于機器學習進行顫振識別,具有更好的顫振識別效率,常見的顫振頻率提取相關算法總結如表2 所示。
如果說蓋博和蘇珊娜的愛是愛在神性的死中戰勝了自然性的死,那么,浮西努對蓋博的愛,便是努力地將一眨眼的幸福變成永恒的情愛,浮西努因為戰爭,可以讓自己對一個男人的愛意輕而易舉地無限地擴張,由此產生的藝術魅力使整部作品充滿詩意。
相比DNN,支持向量機(Support Vector Machine,SVM)在非線性、小樣本的數據中可表現出更好的魯棒性和泛化能力。錢士才等[103]建立了基于數據集特征庫的可在線進化最小二乘一類支持向量機(Least Squares One Class Sup‐port Vector Machine,LS-OC-SVM)顫振識別模型。Chen 等[104]采用了線性支持向量機(Linear Support Vector Machine LSVM)模型,其計算量小、實時性好,為顫振在線監測系統開發提供了策略。Li 等[105]采用了多分類支持向量機(Multi-Class Support Vector Machine,MC-SVM)模型,彌補了LSVM 分類精度較差的問題。Wan等[106]通過Adaboost 算法集成多個SVM 弱分類器,以組成性能更佳的強分類器Adaboost-SVM,避免了因樣本標簽錯誤導致顫振分類精度下降的問題,如圖8 所示。Ren 和Ding[107]將自適應Hanke 低秩分解(Adaptive Hankel Low-rank Decomposition,AHLRD)和SVM 結合,并對信號處理和顫振識別進行了實時性評估,建立了具備良好的實時性、精度和早期顫振敏感性的顫振監測系統。
“雨課堂”提供了填空題、單選題、多選題、主觀題、投票等互動設置,教師提前設置題目,課堂發布,學生在手機上即時作答,答題結果當即反饋給教師,方便及時評估學生知識點掌握情況。在具體的教學過程中,采用分組討論,提前設置主觀題“中美貿易摩擦對航運業的影響”“大數據和互聯網+背景下,船舶經紀人將何去何從”等,學生分組查閱資料并展開激烈討論,踴躍發表自己觀點,大大提高上課質量。同時也可發布試卷,進行課堂測驗。

圖8 Adaboost-SVM 原理圖結構[106]Fig.8 Adaboost-SVM schematic structure[106]
提升法(Boosting)同樣由多個弱分類器所組成,所構成的強分類器極大地提升了其預測精度,并具備參數設置簡易、無需先驗知識等特點[108]。目前用于顫振識別的相關算法有梯度樹提升算法(Gradient Tree Boosted,GTB)和輕梯度提升算法(Light Gradient Boosting,LGB)。其中GTB 在確定顫振時間和嚴重程度方面實現了智能化應用[14],如圖9 和圖10 所示。LGB 則通過結合近鄰傳播聚類算法后實現了在可變切削條件下的高精度顫振識別結果[109]。

圖9 顫振實際發生與檢測時間點對比圖Fig.9 Comparison of actual chatter occurrence and de‐tection time points
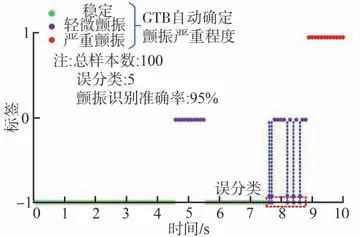
圖10 GTB 識別顫振嚴重程度與準確率Fig.10 Grade and accuracy of GTB chatter identification
決策樹可通過信息增益尋找最大信息量的屬性字段,從而建立并延伸決策樹的節點和分支,所形成的樹狀結構使得模型具有可讀性強、實現簡單以及分類迅速等特點[110],克服了提升法的不足。Wang 等[111]利用分類和回歸樹(Classi‐fication and Regression Trees,CART)算法建立了自動顫振識別的決策樹模型。然而決策樹易出現過擬合現象,而梯度提升決策樹(Gradient Boosting Decision Trees,GBDT)針對該問題可取得良好的優化效果,周曉敏等[112]則通過GBDT 算法建立了振動能量回歸模型并完成了特征選擇以及模型簡化,實現了冷軋顫振監測。此外,有學者將優化算法與K 近鄰結合[113-114],降低了運算成本,采用隱馬爾可夫模型[115]建立顫振辨識模型,采用隨機森林[116]克服了決策樹容易陷入過擬合的問題,均取得了良好的顫振識別精度。
數控機床各執行部件的運動主要依靠PLC信號實現,因此數控機床各項參數的采集可通過讀取機床端PLC 信號獲得[9];機床端PLC 信號的采集方法主要有:PCI(Peripheral Component In‐terconnect)總線采集法[18]、嵌入式系統采集法[19-21]和機床外接PLC 采集法[22-23],前二者在實時性和可靠性上更佳,后者則具備更好的靈活性。基于PLC 數據采集架構主要由設備層和PLC 數據采集層以及數據傳輸層(串口、網口等)組成[24],其原理是PLC 對設備層中傳感器的模擬信號進行采集,然后將模擬信號進行A/D 轉換為數字信號后,最終將數字信號經過不同的矩陣運算即可輸出對應類型的信號[23](如力信號、加速度信號)。另外依靠數據傳輸層中的PLC 通訊接口,可使數據有利于存儲和傳輸,當前較先進的PLC 設備開始支持以太網,搭配網口通訊的PLC將進一步提升數據的傳輸能力。
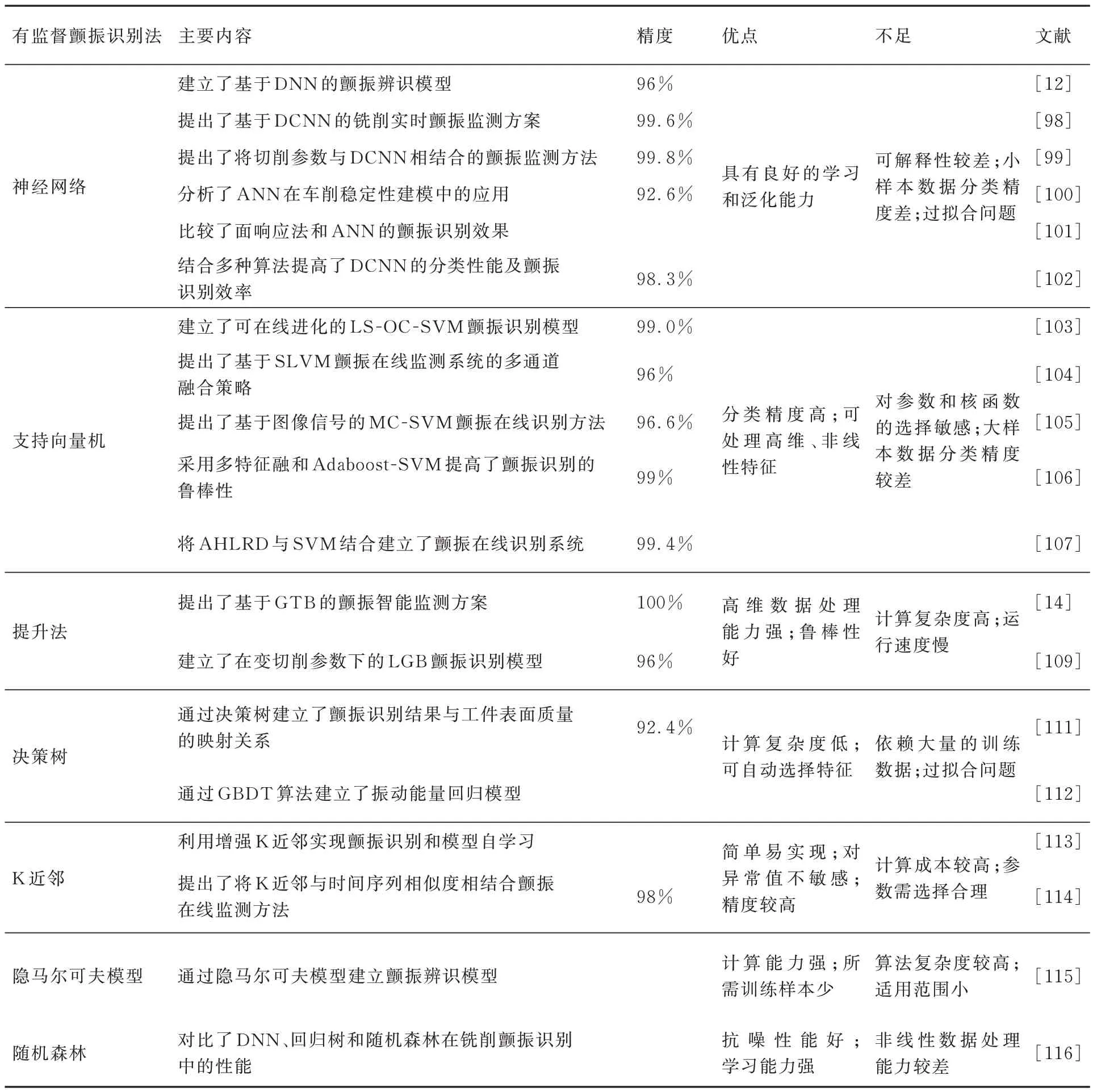
表4 有監督顫振識別法優缺點及應用總結Table 4 Summary of advantages,disadvantages and applications of supervised chatter identification
3.2 無監督顫振識別技術
無監督學習無需預先訓練出模型,可通過輸入無標簽數據,依靠數據中蘊含的結構構造模型,適合用于實時、高速的處理場景[117]。相比于有監督學習,無監督學習在挖掘數據潛在信息上更具優勢,避免了依賴大量人工標記數據導致的標記成本高的問題。隨著計算機硬件和算法的發展,無監督學習開始逐步應用于切削加工顫振識別,如聚類法和高斯混合模型。
相較于有監督學習,無監督學習在精度上稍遜一籌,因此,須選擇更加合適的特征,Wang等[37]從峭度概率密度函數(Kurtosis Possibility Density Function,KPDF)中提取了相交距離和交叉面積兩種顫振指標,該兩種指標與K-means聚類法相結合,聚類精度有明顯提高,如圖11 所示。由于K-means 聚類法的K 個初始聚類中心的選擇是隨機的,易導致算法對異常數據格外敏感,從而影響分類精度。張雪峰[118]通過建立聚類數和中心距離的函數關系,選擇圖像拐點作為最佳K 值,然后采用K-means 聚類法對銑削工藝系統動剛度變化情形進行歸納,建立了銑削工藝系統的動剛度計算公式。Dun 等[119]采用一種基于密度和距離度量的混合聚類法對壓縮信號進行分類,克服了K-means 聚類法無法解決不規則形狀數據集的問題。
從“十二五”期間國際油價大幅下跌以來,石油勘探開發板塊整體效益大幅下滑,低效益、負效益成為石油開發近年的“熱詞”。如何實現長期的可持續、高質量發展,是全球各大石油公司面臨的巨大挑戰。同時受低油價影響,科技研發投入降低,世界范圍內除美國頁巖油外,近年來油田開發技術,尤其是老油田提高采收率技術沒有大的突破與創新。大港油田作為一個開發五十余年的老油田,面臨的形勢更加嚴峻。

圖11 基于KPDF 和K-means 的顫振在線監測流程圖Fig.11 Flow chart of online chatter monitoring based on KPDF and K-means
高斯混合模型(Gaussian Mixture Model,GMM)依據概率分配聚類成員,相較于K-means聚類法具有更靈活的類簇形狀。Wang 和Cunha[120]在高速切削加工中比較了GMM 與Kmeans 聚類法兩種無監督算法,其中GMM 可處理更多形狀的數據集。為解決傳統GMM 存在概念漂移問題,Diaz-Rozo 等[121]提出了一種基于GMM 的動態概率聚類法,可用于實時監測機床顫振情況,并具備更好的魯棒性。Fu 等[77]將歸一化能量比(Normalized Energy Ratio,NER)和CV 兩種特征與GMM 結合實現了顫振監測中閾值的自動確定,如圖12 所示。汪曉姍[122]采用GMM 對特征進行擬合,建立了顫振特征與銑削狀態之間的函數關系,增強了顫振在線監測的實時性。
校企合作課題研究培訓教師的教科研能力是一種新嘗試,碰出了校企合作的感情火花和創新思維。這種以課程教學創新為目標、以研發產品為載體的培訓活動增加了校企合作的粘度,也打開了教師教學改革的視野,取得的成果更加刺激了教師的積極性,對于專業帶頭人致力于專業教學改革提供了新的思路,達到了“授人以欲”到“授人以漁”的目的。其成功的原因主要歸納為24個字:自主研發、入心激欲、過程評價、分層管理、閉環控制。

圖12 基于GMM 的顫振識別模型[77]Fig.12 Model of chatter identification based on GMM[77]
無監督學習法發展相對緩慢,目前仍缺乏較好的邏輯推理和記憶能力,當前基于無監督顫振識別技術的研究還需增加相應評估,如聚類趨勢、數據簇數以及聚類質量等。在實際生產生活中,無標簽數據占主體,采用無監督學習發現數據的內在關系,可獲得更好的顫振監測效率,在未來有更廣闊的發展空間。
本文采用聚類分析方法對不同載荷分布比例的車輛進行區分,聚類后同類數據盡可能地聚集到一起,不同類的數據盡量分離,以找到隱含的規律。聚類算法的選擇取決于數據的類型和聚類的目的。K-均值(K-Means)是劃分方法中比較經典的聚類算法,效率較高,廣泛應用于大規模數據的聚類。
4 結論與展望
對國內外關于切削加工過程中顫振在線監測方面的研究進行了總結,主要包括顫振數據采集方法、影響顫振信號處理實時性與精確性的關鍵因素以及基于有無監督學習的顫振識別方法。在數據采集方面,目前有外接傳感器數據采集、PLC 數據采集和通訊接口數據采集,該3 種數據采集方式在使用場合及數據采集種類方面具有較好的互補性,通訊接口采集技術在數據采集與處理之間體現了較好的協同性。在信號處理方面,現有研究主要集中在對算法的優化以及建立高效的顫振信號處理系統。在顫振識別方面,現有工作主要體現在提升有監督顫振識別法的時效性以及無監督顫振識別法的精確性方面。
總體而言,目前國內外學者在切削加工顫振在線監測研究中取得了一系列進展,但在保證顫振識別精確性的前提下,真正實現顫振的實時監測仍存在較大距離,筆者認為可以從以下3 個方面進行更深入研究:
1)通過外接傳感器的數據采集方式仍是當前主流,但各傳感器存在固有缺陷,易遺漏加工過程中的有用信息,利用通訊接口采集技術可獲得良好的數據采集和處理能力,實現更高效的顫振在線監測,將是未來數據采集的趨勢。
由雙向DC/DC變換器的效率分析可知DC/DC變換器兩側的蓄電池和超級電容的壓差越小,DC /DC變換器的效率越高。為了有效利用變換器的效率,所以在進行復合電源參數匹配分析時,應該讓超級電容組的電壓和蓄電池組的電壓接近。按照分析,超級電容容量應該滿足的約束條件為:
目前通訊接口采集技術仍存在通訊接口不統一、兼容性和開放性不足以及過分依賴高性能軟硬件設備等問題,如何解決上述問題是未來顫振在線監測更好運用于工程實際的關鍵。
此功能使用的是Valve公司發布的SteamVR插件,并將該插件導入到Unity3D游戲開發引擎中,再經過腳本命令的編寫,完善其精細程度,將其導出為APK文件安裝至手機,即可實現三維人骨模型的虛擬增強。
2)目前大多學者都致力于建立先進的顫振在線監測系統,然而現有的監測系統仍無法及時反饋機床的狀態信息,且顫振識別精度會隨著加工系統剛度變化而逐漸下降,筆者認為可以從以下幾點進行研究:①研究顫振特征選擇與融合的理論基礎;②探究先進的實時數據處理和決策方法;③開發具備特征自動提取、在線進化的顫振監測系統。從而有效識別顫振早期信號特征,是進一步提高顫振監測實時性與精確性的關鍵。
3)目前在顫振監測過程中,有監督學習因需要大量帶標記數據,代價昂貴,已逐漸發展到瓶頸,無監督學習具備快速的計算能力,不依賴樣本標簽,將會是未來智能化顫振在線監測的重要發展方向。提升無監督學習信息利用率、深入探究有監督與無監督學習的融合機制,以建立同時具備良好的實時性和精確性的顫振識別模型,可作為未來顫振在線監測的研究方向之一。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39