基于北斗定位的無人機(jī)可視化監(jiān)測(cè)方法
2023-07-25 09:55:14王海楠
電子設(shè)計(jì)工程 2023年15期
宋 煜,黃 祥,張 欣,王海楠
(江蘇方天電力技術(shù)有限公司,江蘇南京 211102)
隨著通信技術(shù)的不斷發(fā)展與融入,人們已經(jīng)可以利用無人機(jī)精準(zhǔn)地監(jiān)測(cè)任務(wù),獲取大量的精準(zhǔn)數(shù)據(jù)[1]。無人機(jī)操作者在控制無人機(jī)執(zhí)行任務(wù)的同時(shí),也要關(guān)注無人機(jī)自身及其周邊環(huán)境的相關(guān)數(shù)據(jù)[2]。由此可見無人機(jī)監(jiān)管模塊的重要性,國內(nèi)外學(xué)者均對(duì)其進(jìn)行了深入的研究。
吳曌月[3]提出了基于GPS 全球衛(wèi)星導(dǎo)航系統(tǒng)的無人機(jī)可視化監(jiān)測(cè)方法,在GPS 導(dǎo)航的基礎(chǔ)上對(duì)無人機(jī)的飛行位置進(jìn)行全方位監(jiān)測(cè),實(shí)時(shí)完成高精度數(shù)據(jù)上傳。該方法具有較高的數(shù)據(jù)采集精準(zhǔn)性,但是容易造成數(shù)據(jù)泄露,安全性較低。李英成[4]等提出了基于北斗一代系統(tǒng)的無人機(jī)飛行數(shù)據(jù)監(jiān)管方法,通過北斗一代系統(tǒng)中的雙星定位,獲取無人機(jī)的實(shí)時(shí)位置數(shù)據(jù),可以實(shí)時(shí)授權(quán)無人機(jī)監(jiān)管模塊上傳與通信功能,具有較高的數(shù)據(jù)采集效率。但是該方法不能滿足信號(hào)與國際導(dǎo)航系統(tǒng)的格式兼容,從而導(dǎo)致無人機(jī)數(shù)據(jù)監(jiān)管方法沒有廣泛推廣。
綜上所述,該文利用北斗定位研究了一種新的無人機(jī)可視化監(jiān)測(cè)方法。
1 無人機(jī)可視化數(shù)據(jù)采集
對(duì)無人機(jī)可視化數(shù)據(jù)的采集通常在較為復(fù)雜的環(huán)境下進(jìn)行,確定可視化數(shù)據(jù)采集滿足不同環(huán)境下的精準(zhǔn)定位要求。該文選用北斗定位導(dǎo)航芯片[5]作為數(shù)據(jù)采集的核心元件,該芯片具有抗干擾性能高、能夠適應(yīng)北斗通信系統(tǒng)以及能夠精準(zhǔn)高速處理數(shù)據(jù)的特點(diǎn)。該芯片在對(duì)外部的可視化數(shù)據(jù)采集的過程中設(shè)定數(shù)據(jù)的輸入通道是64 位HTM 芯片,通道中的傳輸數(shù)據(jù)頻率控制在BDSB1/GPDL1 范圍內(nèi),由于無人機(jī)所處環(huán)境實(shí)時(shí)更新,所以采集數(shù)據(jù)的更新頻率必須大于1.5 Hz,對(duì)可視化數(shù)據(jù)采集的精準(zhǔn)度也控制在-163 dBm 以內(nèi)[5]。
無人機(jī)可視化數(shù)據(jù)在芯片中會(huì)在STM32 串口處進(jìn)行相關(guān)數(shù)據(jù)的接收與格式初始化,再從該引腳PA2 和PA3 處進(jìn)入到引腳T2IN 中,完成可視化數(shù)據(jù)傳輸通信的申請(qǐng),通過申請(qǐng)的數(shù)據(jù)再進(jìn)入到TXD1中,被傳輸模塊中的處理器讀取。無人機(jī)可視化數(shù)據(jù)從采集到傳輸流程之間所在的電路連接圖如圖1所示。
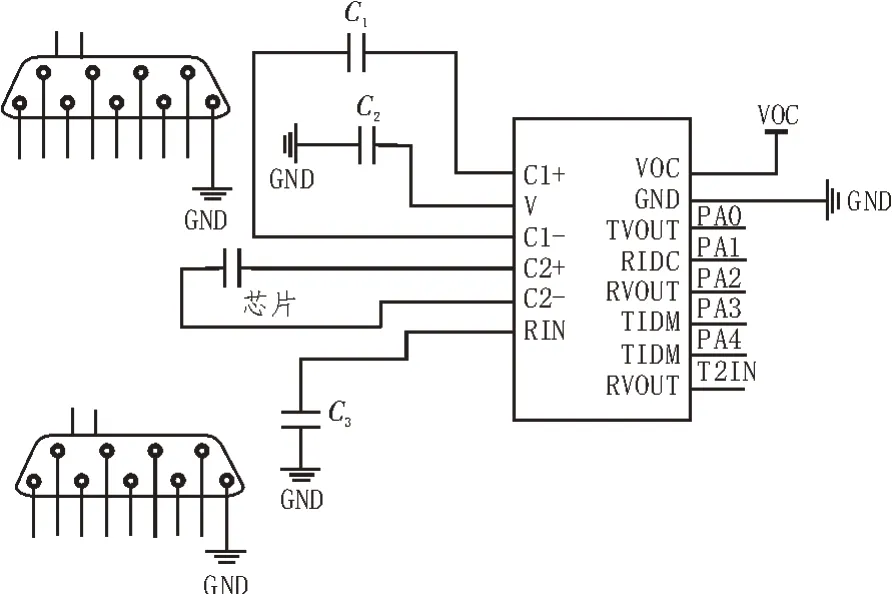
圖1 無人機(jī)可視化數(shù)據(jù)從采集到傳輸流程之間所在的電路連接圖
根據(jù)圖1 可知,無人機(jī)可視化數(shù)據(jù)從采集到傳輸流程之間所在的電路內(nèi)部擁有三個(gè)電容,一個(gè)芯片[6]。當(dāng)無人機(jī)由于某種原因與操作終端之間失去聯(lián)系或無人機(jī)出現(xiàn)事故,其中的無線射頻模塊開始動(dòng)作。無線射頻模塊中的核心元件為芯片,該芯片與操作端口中的射頻電路實(shí)時(shí)保持關(guān)聯(lián)[7]。在無人機(jī)失去聯(lián)系信號(hào)的第一時(shí)間,該模塊迅速對(duì)周圍的信息進(jìn)行采集,并將采集到的可視化信息發(fā)送到操作終端中,模塊采集的可視化數(shù)據(jù)中不僅僅包含無人機(jī)的事故信息,同時(shí)也包含報(bào)警請(qǐng)求信號(hào),以便幫助操控人員對(duì)無人機(jī)實(shí)施搜救。
2 無人機(jī)可視化數(shù)據(jù)傳輸
基于北斗定位的無人機(jī)可視化數(shù)據(jù)傳輸采用的是無線通信傳輸模式,可以幫助無人機(jī)在飛行狀態(tài)下具有較好的數(shù)據(jù)傳輸穩(wěn)定性和暢通性。
無人機(jī)對(duì)外傳輸數(shù)據(jù)時(shí)要確定可視化數(shù)據(jù)包的基礎(chǔ)格式與初始格式,對(duì)兩種格式的前導(dǎo)碼進(jìn)行檢測(cè),同時(shí)還要校驗(yàn)可視化數(shù)據(jù)長度是否符合數(shù)據(jù)傳輸終端地址的規(guī)范類型,完成檢驗(yàn)后的數(shù)據(jù)包被劃分成為前導(dǎo)碼、同步字、數(shù)據(jù)包長、傳輸?shù)刂贰⒂行?shù)據(jù)、CRC 校驗(yàn)數(shù)據(jù)六部分[8-9]。
其中前導(dǎo)碼是可視化數(shù)據(jù)的交叉序列表現(xiàn)形式,無人機(jī)在數(shù)據(jù)傳輸之前設(shè)置一個(gè)前導(dǎo)碼可以將所有的可視化數(shù)據(jù)同步,同步字的作用是將無人機(jī)可視化數(shù)據(jù)中的字節(jié)同步處理,處理后的字節(jié)可以被應(yīng)用在32 位的傳輸通道中,數(shù)據(jù)包長度是表現(xiàn)數(shù)據(jù)包長度的一種形式[10-11]。
PC 機(jī)與無人機(jī)操作終端之間的運(yùn)作流程如圖2所示。
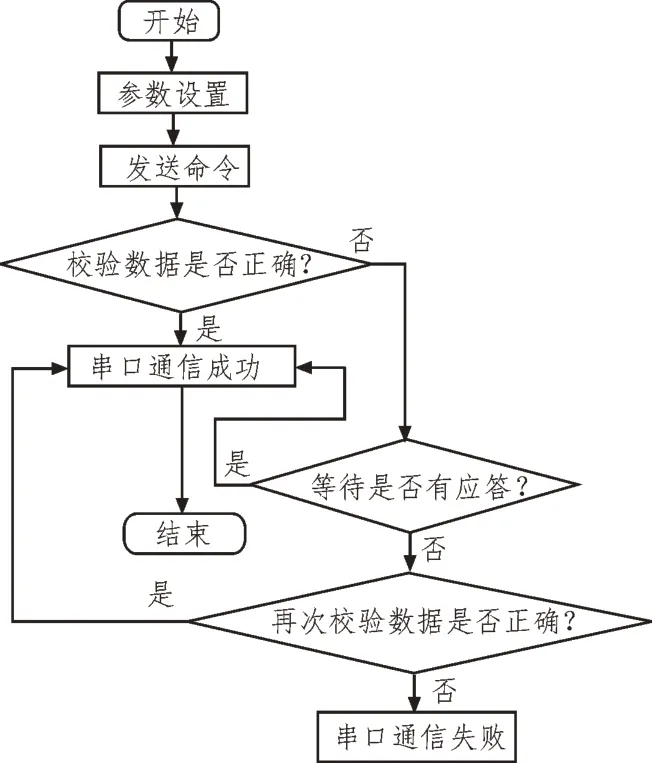
圖2 PC機(jī)與無人機(jī)操作終端之間的運(yùn)作流程
根據(jù)圖2 可知,通過參數(shù)設(shè)置和發(fā)送命令完成初始化,檢驗(yàn)數(shù)據(jù)成功,判斷數(shù)據(jù)通信是否成功。有效數(shù)據(jù)和CRC 校驗(yàn)數(shù)據(jù)分別代表無人機(jī)可視化采集數(shù)據(jù)和通信相關(guān)數(shù)據(jù)[12-13]。當(dāng)無人機(jī)由于某種原因與操作終端之間失去聯(lián)系,或出現(xiàn)事故,則無人機(jī)的PC 通信機(jī)開始運(yùn)作,PC 通信機(jī)中的RS-232C 與操作終端中的信息框發(fā)起呼叫,并不間斷地向操作終端發(fā)送無人機(jī)的實(shí)時(shí)位置,還要保證無人機(jī)的呼叫通信接口時(shí)鐘與操作終端時(shí)鐘同頻。
3 無人機(jī)可視化數(shù)據(jù)監(jiān)測(cè)
利用傳感器對(duì)數(shù)據(jù)進(jìn)行監(jiān)測(cè),監(jiān)測(cè)示意圖如圖3所示。
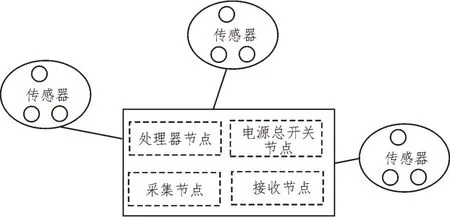
圖3 監(jiān)測(cè)示意圖
根據(jù)圖3 可知,該文研究的數(shù)據(jù)監(jiān)測(cè)方法通過3個(gè)傳感器對(duì)節(jié)點(diǎn)進(jìn)行監(jiān)測(cè)。遠(yuǎn)程服務(wù)器的通信功能建立在套接字技術(shù)上,服務(wù)器中的套接字在Socket函數(shù)上與本地IP 和端口相關(guān)聯(lián),保證IP 端口與通信端口在同頻信道上[14]。服務(wù)器上還有l(wèi)isten 函數(shù),進(jìn)入該函數(shù)的通信數(shù)據(jù)需要等待無人機(jī)操控端口的確認(rèn),若得到操控端口的認(rèn)可,則使用accept 函數(shù)對(duì)無人機(jī)可視化數(shù)據(jù)的內(nèi)容進(jìn)行提取,并將提取出來的數(shù)據(jù)與標(biāo)準(zhǔn)化數(shù)據(jù)庫中的參數(shù)對(duì)比;若沒有得到操控端口的認(rèn)可,則需要返回到通信通道中,在套接字ns上規(guī)劃讀/寫格式[15]。Socket函數(shù)表達(dá)式如下所示:
其中,af代表無人機(jī)可視化待監(jiān)測(cè)數(shù)據(jù)的一個(gè)地址,type 代表套接口類型,protocol 代表數(shù)據(jù)套接口的通信協(xié)議。
listen 函數(shù)的表達(dá)式如下所示:
其中,sockfd 代表套接口處的未連接可視化數(shù)據(jù),backlog 代表可視化數(shù)據(jù)的等待監(jiān)測(cè)長度[16]。accept 函數(shù)表達(dá)式如下所示:
其中,socket 代表套接口在完成數(shù)據(jù)連接后的監(jiān)測(cè)連接端,addr 代表可以供信道緩沖的可視化數(shù)據(jù)地址,addeten 代表addr 地址的有效長度。
最終的函數(shù)結(jié)果表現(xiàn)在監(jiān)控客戶端中,在客戶端中以三維圖形的方式體現(xiàn),增強(qiáng)了北斗定位系統(tǒng)的可視化性能,無人機(jī)的管理人員通過數(shù)據(jù)管理模塊或通信模塊可以實(shí)現(xiàn)對(duì)無人機(jī)可視化數(shù)據(jù)的實(shí)時(shí)監(jiān)測(cè)。當(dāng)無人機(jī)由于某種原因與操作終端之間失去聯(lián)系,或出現(xiàn)事故,無人機(jī)的操控端仍可以應(yīng)用此套流程完成對(duì)無人機(jī)事故的相關(guān)數(shù)據(jù)完成監(jiān)測(cè),幫助后續(xù)的搜救任務(wù)順利完成。
4 實(shí)驗(yàn)研究
為了驗(yàn)證該文提出的基于北斗定位的無人機(jī)可視化監(jiān)測(cè)方法的有效性,設(shè)定驗(yàn)證實(shí)驗(yàn)。在實(shí)驗(yàn)前,建立傳輸?shù)刂罚瑐鬏數(shù)刂肥菙?shù)據(jù)包中的數(shù)據(jù)卸載傳輸時(shí)需要對(duì)外表現(xiàn)的代碼,通過無人機(jī)內(nèi)部的ADDR 寄存器可以調(diào)整地址,ADDR 寄存器可以調(diào)整的地址類型如表1 所示。
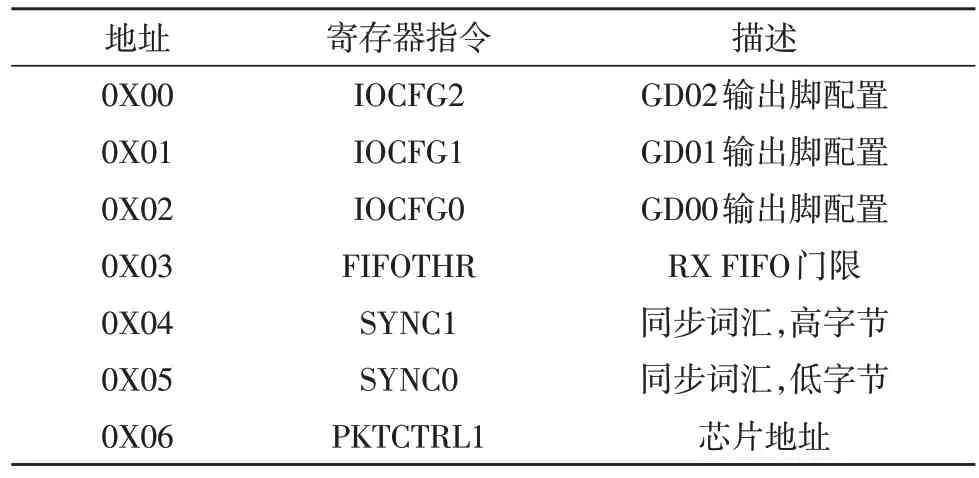
表1 ADDR寄存器可以調(diào)整的地址類型
實(shí)驗(yàn)參數(shù)設(shè)定如下:操作系統(tǒng)為Windows 10,共有60 位,內(nèi)存為48 GB,處理器為i5。設(shè)定實(shí)驗(yàn)環(huán)境如圖4 所示。
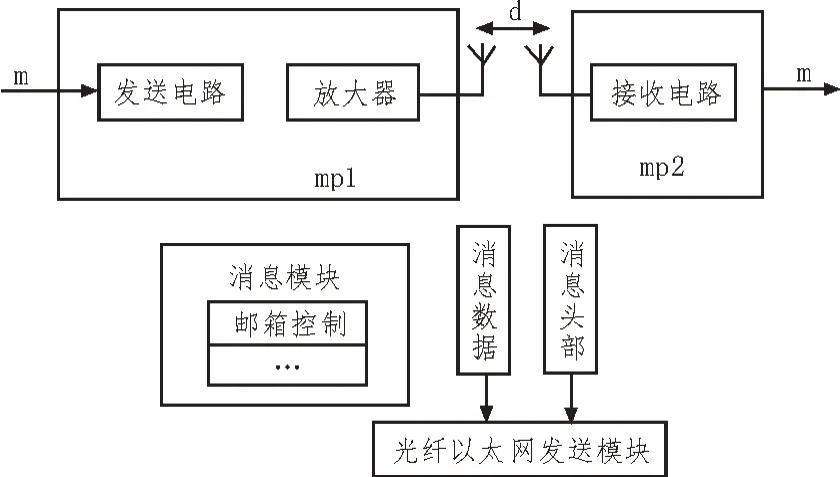
圖4 設(shè)定實(shí)驗(yàn)環(huán)境
圖4 中,m 表示無人機(jī)空位信號(hào),d 表示串行通信接口。根據(jù)圖4 可知,該文研究的無人機(jī)可視化監(jiān)測(cè)實(shí)驗(yàn)利用發(fā)送電路和接收電路實(shí)現(xiàn)信息的處理,內(nèi)部設(shè)置了消息模塊,通過光纖以太網(wǎng)進(jìn)行數(shù)據(jù)發(fā)送。
在小型固定翼無人機(jī)平臺(tái)上,對(duì)無人機(jī)數(shù)據(jù)進(jìn)行采集設(shè)定相機(jī)的曝光時(shí)間低于1/500 s,采集的數(shù)據(jù)為2 663 幅,飛機(jī)的飛行高度為800 m,飛行區(qū)域如圖5 所示。
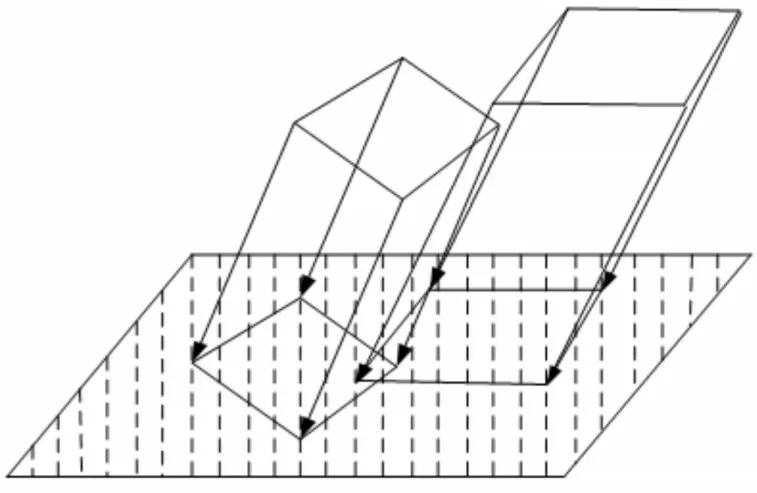
圖5 飛行區(qū)域示意圖
根據(jù)圖5 可知,飛行區(qū)域跨越經(jīng)過一段時(shí)間。利用該文的監(jiān)測(cè)方法和傳統(tǒng)的基于GPS 全球衛(wèi)星導(dǎo)航系統(tǒng)的無人機(jī)可視化監(jiān)測(cè)方法、基于北斗一代系統(tǒng)的無人機(jī)飛行數(shù)據(jù)監(jiān)管方法進(jìn)行精度對(duì)比,比較并行路段的精度和合點(diǎn)、分點(diǎn)精度。并行路段精度實(shí)驗(yàn)結(jié)果如圖6 所示。
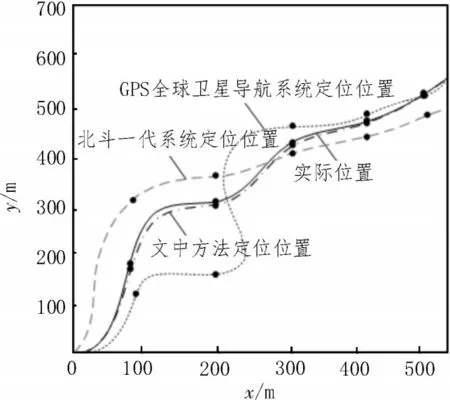
圖6 并行路段精度實(shí)驗(yàn)結(jié)果
根據(jù)圖6 可知,在并行路段,無人機(jī)以曲線方式飛行,傳統(tǒng)的基于GPS 全球衛(wèi)星導(dǎo)航系統(tǒng)的無人機(jī)可視化監(jiān)測(cè)方法、基于北斗一代系統(tǒng)的無人機(jī)飛行數(shù)據(jù)監(jiān)管方法與實(shí)際位置存在較大的偏差,該文方法與實(shí)際位置基本一致。造成這種現(xiàn)象的原因是該文基于新一代的北斗定位研究無人機(jī)可視化監(jiān)測(cè)方法,在北斗定位系統(tǒng)通信技術(shù)和定位技術(shù)逐漸成熟的情況下,對(duì)無人機(jī)的飛行狀態(tài)和飛行環(huán)境等信息實(shí)時(shí)觀測(cè),再將觀測(cè)到的數(shù)據(jù)上傳至終端,供操作人員分析使用,解決了傳統(tǒng)方法中的無法保障信息安全問題和監(jiān)測(cè)結(jié)果不準(zhǔn)確等問題。合點(diǎn)、分點(diǎn)精度實(shí)驗(yàn)結(jié)果如圖7 所示。
根據(jù)圖7 可知,實(shí)際的無人機(jī)采用直線方式進(jìn)行飛行,該文方法與實(shí)際位置相近,而傳統(tǒng)的基于GPS 全球衛(wèi)星導(dǎo)航系統(tǒng)的無人機(jī)可視化監(jiān)測(cè)方法、基于北斗一代系統(tǒng)的無人機(jī)飛行數(shù)據(jù)監(jiān)管方法向著反方向行駛。造成這種現(xiàn)象的原因是該文研究的基于北斗定位的無人機(jī)可視化數(shù)據(jù)監(jiān)控中心是無人機(jī)可視化數(shù)據(jù)監(jiān)測(cè)流程的核心。監(jiān)控中心可以通過北斗定位系統(tǒng)對(duì)無人機(jī)所采集和處理的所有數(shù)據(jù)進(jìn)行監(jiān)控管理,負(fù)責(zé)數(shù)據(jù)監(jiān)控的是基于北斗定位系統(tǒng)的遠(yuǎn)程服務(wù)器,負(fù)責(zé)數(shù)據(jù)管理的是基于北斗定位系統(tǒng)的數(shù)據(jù)庫。其中遠(yuǎn)程服務(wù)器可以使無人機(jī)與控制終端之間建立起數(shù)據(jù)紐帶,實(shí)現(xiàn)兩者之間的通信,數(shù)據(jù)庫可以對(duì)無人機(jī)采集與處理的數(shù)據(jù)實(shí)現(xiàn)長久存留,并在大數(shù)據(jù)與云計(jì)算的基礎(chǔ)上建立起三維的無人機(jī)飛行歷史記錄。
數(shù)據(jù)庫除了具有提供數(shù)據(jù)儲(chǔ)存的功能外,還具有檢索、數(shù)據(jù)處理和保護(hù)數(shù)據(jù)的功能,為了能夠滿足無人機(jī)可視化數(shù)據(jù)監(jiān)測(cè)的持續(xù)性,數(shù)據(jù)庫在數(shù)據(jù)監(jiān)測(cè)的過程中不斷擴(kuò)展自身的儲(chǔ)存空間,隨著監(jiān)測(cè)時(shí)間的增長,數(shù)據(jù)庫的容量也就越大,但是數(shù)據(jù)庫的數(shù)據(jù)極限儲(chǔ)存量為三個(gè)月的無人機(jī)監(jiān)測(cè)數(shù)據(jù)。
5 結(jié)束語
該文研究了基于北斗定位系統(tǒng)的無人機(jī)可視化數(shù)據(jù)監(jiān)測(cè)方法,利用北斗定位系統(tǒng)的精準(zhǔn)定位功能和數(shù)據(jù)采集功能,再加上無人機(jī)自身的數(shù)據(jù)通信、處理、管理和儲(chǔ)存功能,解決了傳統(tǒng)方法中的信息采集質(zhì)量差、安全性不高等問題。該文研究的監(jiān)測(cè)方法監(jiān)測(cè)時(shí)間較長,未來需要進(jìn)一步深入分析。
猜你喜歡
北京測(cè)繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測(cè)繪(2021年7期)2021-07-28 07:01:18
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評(píng)論(2019年4期)2019-07-13 05:49:14
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12