基于Qt的系留多旋翼無(wú)人機(jī)地面站軟件設(shè)計(jì)與實(shí)現(xiàn)
2023-07-20 23:26:45孫美娟鄒天宇馬靖
無(wú)線互聯(lián)科技 2023年9期
孫美娟 鄒天宇 馬靖
摘要:系留多旋翼無(wú)人機(jī)在多旋翼無(wú)人機(jī)的基礎(chǔ)上增加了系留線纜,使其可以通過(guò)地面電源直接供電,解決了多旋翼無(wú)人機(jī)續(xù)航時(shí)間短的問(wèn)題。對(duì)此,文章以Qt5.14.2為開(kāi)發(fā)平臺(tái),開(kāi)發(fā)了一套功能完整、操作簡(jiǎn)潔的系留多旋翼無(wú)人機(jī)地面站軟件系統(tǒng)。該系統(tǒng)實(shí)現(xiàn)了對(duì)無(wú)人機(jī)遙測(cè)數(shù)據(jù)實(shí)時(shí)顯示、遙測(cè)指令發(fā)送、故障報(bào)警提示、電子地圖顯示、搭載不同載荷、數(shù)據(jù)存儲(chǔ)和回放等功能。經(jīng)過(guò)多次實(shí)際飛行測(cè)試,驗(yàn)證了系統(tǒng)功能的可靠性、完整性及可移植性。
關(guān)鍵詞:系留多旋翼;無(wú)人機(jī);Qt;地面站軟件
中圖分類號(hào):TP18
文獻(xiàn)標(biāo)志碼:A
0 引言
系留多旋翼無(wú)人機(jī)在傳統(tǒng)無(wú)人機(jī)技術(shù)上增加了系留線纜系統(tǒng),既可采用自身攜帶的備用電池進(jìn)行供電,也可通過(guò)地面線纜系統(tǒng)向無(wú)人機(jī)供電,實(shí)現(xiàn)為無(wú)人機(jī)提供長(zhǎng)期、不間斷的電力動(dòng)力,從而實(shí)現(xiàn)無(wú)人機(jī)長(zhǎng)時(shí)間滯空[1-2]。與普通多旋翼無(wú)人機(jī)相比,系留多旋翼無(wú)人機(jī)解決了其續(xù)航時(shí)間短、動(dòng)力不足等缺陷,能夠廣泛應(yīng)用于應(yīng)急救災(zāi)、電磁監(jiān)控等民用領(lǐng)域,同時(shí)也在軍事領(lǐng)域發(fā)揮重要作用[3-4]。
本文是基于Qt5.14.2開(kāi)發(fā)環(huán)境進(jìn)行的無(wú)人機(jī)地面站軟件開(kāi)發(fā),使用C++語(yǔ)言編程,可實(shí)現(xiàn)“一次編寫,隨處編譯”,支持程序在Windows和Linux平臺(tái)下運(yùn)行,有利于國(guó)產(chǎn)化的推廣[5]。
1 軟件需求與功能設(shè)計(jì)
1.1 軟件需求
本軟件主要適用于某項(xiàng)目系留多旋翼無(wú)人機(jī)的控制,軟件需滿足如下設(shè)計(jì)需求:
(1)能夠控制無(wú)人機(jī)及載荷狀態(tài),實(shí)時(shí)顯示無(wú)人機(jī)飛行狀態(tài)信息及載荷狀態(tài)信息;(2)對(duì)接收到的異常數(shù)據(jù)進(jìn)行報(bào)警提示;(3)加載電子地圖并在地圖上顯示定位信息及飛行軌跡信息;(4)支持搭載不同類型載荷;(5)支持對(duì)接收的飛行數(shù)據(jù)及載荷數(shù)據(jù)進(jìn)行存儲(chǔ)及回放。
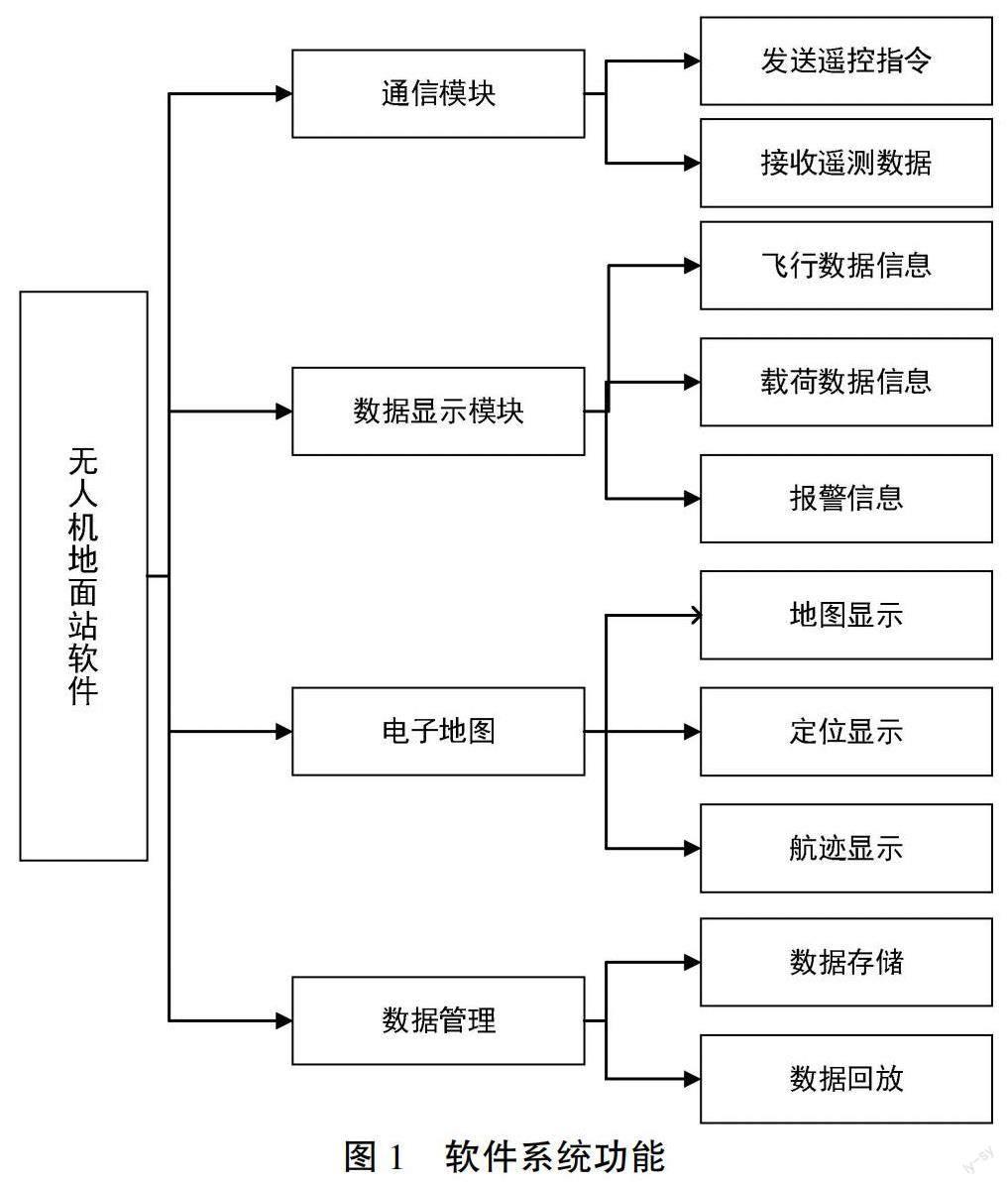
1.2 功能設(shè)計(jì)
根據(jù)上述需求,系統(tǒng)功能采用模塊化設(shè)計(jì),軟件主要功能如圖1所示。
2 通信模塊
通信模塊的實(shí)現(xiàn)是通過(guò)UDP協(xié)議下的Socket網(wǎng)絡(luò)編程實(shí)現(xiàn)的。UDP通信是無(wú)連接型的,相比于TCP具有更高的傳輸速率。通常在傳輸圖像信息、信號(hào)信息等大數(shù)據(jù)量或周期性的數(shù)據(jù)時(shí)采用UDP傳輸,因?yàn)閭鬏斶^(guò)程中即使偶爾丟一兩包數(shù)據(jù),也不影響結(jié)果的可靠性。
2.1 發(fā)送遙控指令
遙控指令的發(fā)送采用UDP組播的形式,每條指令由數(shù)據(jù)頭、有效長(zhǎng)度、消息ID、指令數(shù)據(jù)、校驗(yàn)字組成。遙控指令主要包括控制無(wú)人機(jī)起飛前的檢查指令、起飛指令、飛行中的控制指令、降落指令等。其中,起飛前檢查包括電機(jī)檢測(cè)、磁校準(zhǔn)、電機(jī)轉(zhuǎn)動(dòng)、參數(shù)設(shè)置等指令;飛行過(guò)程中包括對(duì)無(wú)人機(jī)的高度、航向、飛行時(shí)間等的規(guī)劃指令。
操作人員可以隨時(shí)單擊地面站軟件上的指令按鈕向無(wú)人機(jī)發(fā)送相應(yīng)指令,但無(wú)人機(jī)的安全飛行對(duì)指令的發(fā)送有其內(nèi)在的邏輯要求。因此,發(fā)送遙控指令最大的難點(diǎn)在于如何實(shí)現(xiàn)大量指令的合理發(fā)送。這需要根據(jù)系留多旋翼無(wú)人機(jī)的特點(diǎn),了解其內(nèi)部操作邏輯,既能滿足研制要求,也符合無(wú)人機(jī)安全飛行原則。比如:發(fā)送起飛指令的前提是需先成功發(fā)送解鎖指令,使飛機(jī)達(dá)到解鎖狀態(tài);而發(fā)送解鎖指令的前提需先成功發(fā)送自檢指令,完成無(wú)人機(jī)起飛前的檢查。
2.2 接收遙測(cè)數(shù)據(jù)
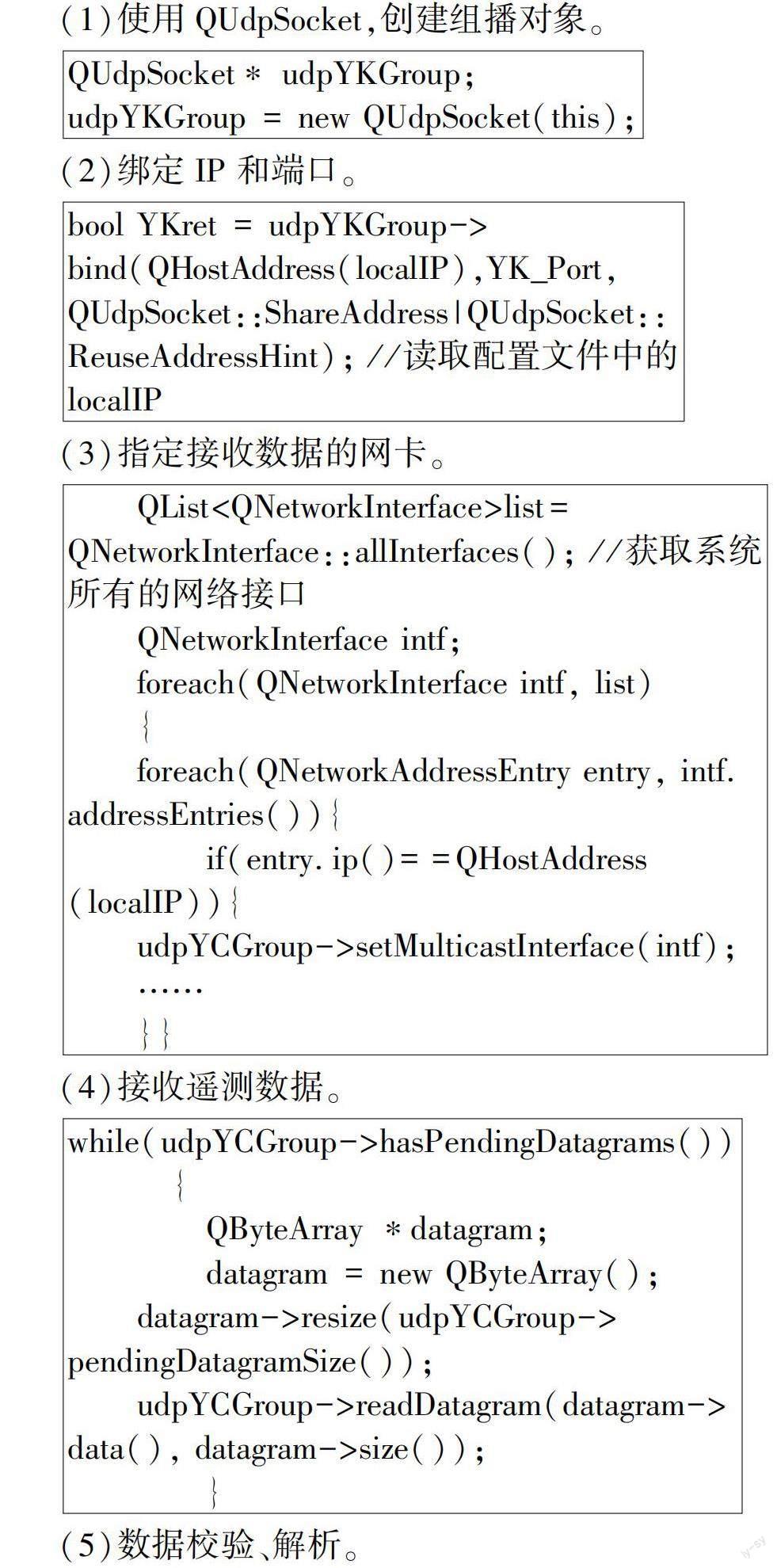
實(shí)現(xiàn)對(duì)遙測(cè)數(shù)據(jù)的接收和解析是地面站軟件的核心功能之一,無(wú)人機(jī)通過(guò)機(jī)載數(shù)據(jù)鏈路將采集的飛行信息和載荷狀態(tài)信息等數(shù)據(jù)發(fā)送到地面的數(shù)據(jù)鏈路接收裝置,地面鏈路再將接收的數(shù)據(jù)傳送到地面站軟件。軟件接收到數(shù)據(jù)后,不能直接發(fā)送到界面顯示,需要先按照指定協(xié)議校驗(yàn),校驗(yàn)通過(guò)再進(jìn)行解析、運(yùn)算以及邏輯處理,將數(shù)據(jù)顯示到界面[6]。接收遙測(cè)數(shù)據(jù)的代碼如下。
(1)使用QUdpSocket,創(chuàng)建組播對(duì)象。
QUdpSocket* udpYKGroup;
udpYKGroup = new QUdpSocket(this);
(2)綁定IP和端口。
bool YKret = udpYKGroup->
bind(QHostAddress(localIP),YK_Port, QUdpSocket::ShareAddress|QUdpSocket::ReuseAddressHint); //讀取配置文件中的localIP
(3)指定接收數(shù)據(jù)的網(wǎng)卡。
QList
QNetworkInterface intf;
foreach(QNetworkInterface intf, list)
{
foreach(QNetworkAddressEntry entry, intf.addressEntries()){
if(entry.ip()==QHostAddress(localIP)){
udpYCGroup->setMulticastInterface(intf);
……
}}
(4)接收遙測(cè)數(shù)據(jù)。
while(udpYCGroup->hasPendingDatagrams())
{
QByteArray *datagram;
datagram = new QByteArray();
datagram->resize(udpYCGroup->pendingDatagramSize());
udpYCGroup->readDatagram(datagram->data(), datagram->size());
}
(5)數(shù)據(jù)校驗(yàn)、解析。
3 數(shù)據(jù)顯示模塊
為保證操作便捷、界面整潔,地面站軟件將接收到的數(shù)據(jù)分為幾個(gè)界面進(jìn)行顯示,分別為主界面、飛行數(shù)據(jù)信息界面以及載荷數(shù)據(jù)信息界面。其中,主界面主要顯示載荷圖像信息、報(bào)警信息和重要飛行數(shù)據(jù)信息。飛行數(shù)據(jù)界面顯示無(wú)人機(jī)下傳的所有飛行數(shù)據(jù)信息;載荷信息界面顯示載荷設(shè)備下傳的所有載荷狀態(tài)信息。
3.1 飛行數(shù)據(jù)信息顯示
飛行數(shù)據(jù)信息采用圖表、圖形與文字的組合方式進(jìn)行顯示。其中,與無(wú)人機(jī)飛行狀態(tài)有關(guān)的橫滾角、俯仰角、航向角等關(guān)鍵數(shù)據(jù)使用實(shí)時(shí)曲線圖形式顯示在軟件的主界面,以便操作人員通過(guò)界面曲線變化情況,直觀地觀察無(wú)人機(jī)整體飛行狀態(tài),及時(shí)調(diào)整飛行姿態(tài)。無(wú)人機(jī)的信號(hào)強(qiáng)弱、電壓值和電池電量,參考手機(jī)的信號(hào)和電池電量的顯示形式,以圖形的方式在主界面的右上方顯示,操作人員可以實(shí)時(shí)觀察無(wú)人機(jī)通信和電壓情況。無(wú)人機(jī)下傳的所有飛行數(shù)據(jù)信息在飛行信息界面顯示。當(dāng)有需要時(shí),操作人員可以點(diǎn)擊飛行信息按鈕調(diào)出該界面,從而更全面、準(zhǔn)確地觀察無(wú)人機(jī)的飛行狀態(tài)。
3.2 載荷數(shù)據(jù)信息顯示
載荷數(shù)據(jù)的顯示內(nèi)容由無(wú)人機(jī)搭載的載荷類型決定,不同載荷類型顯示界面不同。載荷數(shù)據(jù)主要分為兩部分,一部分為載荷自身的設(shè)備狀態(tài)信息,操作人員可以通過(guò)點(diǎn)擊主界面的載荷狀態(tài)按鈕調(diào)出該界面;另一部分為載荷設(shè)備探測(cè)到的圖像信息、信號(hào)頻譜信息等,該信息在軟件主界面顯示。
3.3 報(bào)警信息顯示
故障報(bào)警信息提示是無(wú)人機(jī)地面站軟件極其重要的功能之一,它可以提醒地面操作人員根據(jù)報(bào)警內(nèi)容實(shí)施相應(yīng)的控制策略,以便及時(shí)排除故障、保證飛行安全[6]。該軟件主要通過(guò)文字、圖形及聲音3種方式傳遞故障信息,并且劃分故障等級(jí)。故障等級(jí)不同,采用的報(bào)警方式不同。
(1)當(dāng)出現(xiàn)飛行數(shù)據(jù)超出協(xié)議規(guī)定的范圍的情況時(shí),飛行數(shù)據(jù)信息界面中相應(yīng)的數(shù)據(jù)顯示為:“--”,且文字顏色由正常的綠色變?yōu)榧t色,以便操作人員查看。
(2)當(dāng)機(jī)載電壓值、地面電壓值或電池電量值低于設(shè)定的報(bào)警閾值,則對(duì)應(yīng)圖標(biāo)變?yōu)榧t色。
(3)當(dāng)出現(xiàn)鏈路丟失、解算失敗、無(wú)IMU數(shù)據(jù)、低電壓返航、氣壓計(jì)異常等報(bào)警提示時(shí),軟件主界面頂端位置彈出報(bào)警提示框,并在報(bào)警框中顯示故障信息,為使報(bào)警信息更加醒目,報(bào)警框中文字顏色為紅色。
(3)當(dāng)涉及飛行安全的重要指標(biāo)出現(xiàn)故障或載荷設(shè)備鏈接異常時(shí),軟件同時(shí)會(huì)通過(guò)聲音報(bào)警的方式提示操作人員。當(dāng)報(bào)警解除后,聲音報(bào)警自動(dòng)停止,操作人員也可以手動(dòng)關(guān)閉聲音報(bào)警。
4 電子地圖模塊
該系統(tǒng)使用第三方地圖庫(kù),采用動(dòng)態(tài)顯示加載外部庫(kù)的方式調(diào)用地圖庫(kù)。地面站軟件使用Qt自帶的QLibrary進(jìn)行加載,通過(guò)調(diào)用協(xié)議中指定的接口函數(shù)加載電子地圖,并將無(wú)人機(jī)下傳的經(jīng)度、緯度、高度等信息傳送給地圖庫(kù)。地圖庫(kù)可以對(duì)無(wú)人機(jī)當(dāng)前飛行位置進(jìn)行標(biāo)注,繪制無(wú)人機(jī)運(yùn)行軌跡,并支持地圖的基本操作功能,包括:放大、縮小、清除軌跡、打開(kāi)漫游、取消漫游、進(jìn)入量算、退出量算等。
加載地圖庫(kù)的步驟如下:
(1)把調(diào)用的地圖庫(kù)放在與地面站軟件.exe同一路徑中。
(2)在地面站軟件顯示地圖的UI界面上拖拽一個(gè)QWidget控件,用于顯示加載的地圖。
(3)加載地圖庫(kù)。
5 數(shù)據(jù)存儲(chǔ)與回放
5.1 數(shù)據(jù)存儲(chǔ)
數(shù)據(jù)存儲(chǔ)的主要功能是按照指定的路徑和存儲(chǔ)格式存儲(chǔ)無(wú)人機(jī)下傳的飛行數(shù)據(jù)及載荷設(shè)備下傳的圖像數(shù)據(jù)等信息,并且能夠在必要時(shí)將存儲(chǔ)的數(shù)據(jù)進(jìn)行回放。
本軟件采用文本的形式存儲(chǔ)數(shù)據(jù),數(shù)據(jù)存儲(chǔ)在一個(gè)單獨(dú)的線程中進(jìn)行,使用QTextStream類進(jìn)行存儲(chǔ),該類能將二進(jìn)制文件以數(shù)據(jù)流的形式進(jìn)行存儲(chǔ)[7]。當(dāng)網(wǎng)口從指定端口和IP地址接收到無(wú)人機(jī)下傳的飛行數(shù)據(jù)后,在指定文件夾下,建立以當(dāng)前時(shí)間命名的文本文檔,通過(guò)QTextStream的out函數(shù)將接收的數(shù)據(jù)寫入文本文檔中。
5.2 數(shù)據(jù)回放
數(shù)據(jù)回放功能主要是根據(jù)選擇的數(shù)據(jù)文件將存儲(chǔ)的數(shù)據(jù)以與接收時(shí)完全相同的方式顯示,復(fù)現(xiàn)飛行狀況,以便更準(zhǔn)確地對(duì)飛行數(shù)據(jù)進(jìn)行分析[8]。
數(shù)據(jù)回放的前提需斷開(kāi)無(wú)人機(jī)與地面站軟件的連接。否則,界面既顯示無(wú)人機(jī)下傳的數(shù)據(jù)又顯示回放數(shù)據(jù),會(huì)造成界面數(shù)據(jù)跳動(dòng)、圖像錯(cuò)亂等現(xiàn)象。
數(shù)據(jù)回放多用于觀察無(wú)人機(jī)整體飛行狀況或故障排查,很多情況下并不需要對(duì)每一幀數(shù)據(jù)都仔細(xì)觀察,而在排查故障時(shí),又需要對(duì)故障數(shù)據(jù)詳細(xì)排查。因此,本研究設(shè)計(jì)了6種回放速度,分別為0.5倍、0.75倍、正常速度、1.5倍、2倍、3倍。操作人員可以通過(guò)點(diǎn)擊回放速度按鈕,選擇合適的回放速度。
6 測(cè)試結(jié)果分析及結(jié)論
開(kāi)發(fā)完成的地面站軟件經(jīng)過(guò)3種測(cè)試方式驗(yàn)證其性能。(1)專門開(kāi)發(fā)了一套針對(duì)此地面站軟件的測(cè)試程序,對(duì)軟件的功能進(jìn)行逐一測(cè)試;(2)邀請(qǐng)具有測(cè)評(píng)資質(zhì)的第三方測(cè)評(píng)機(jī)構(gòu)對(duì)軟件測(cè)評(píng),測(cè)評(píng)機(jī)構(gòu)分別對(duì)軟件的功能、外部接口、內(nèi)部接口、適應(yīng)性、安全性等方面進(jìn)行了兩輪測(cè)試,軟件最終通過(guò)測(cè)評(píng);(3)在各種環(huán)境下,經(jīng)多輪實(shí)際飛行實(shí)驗(yàn),對(duì)軟件功能進(jìn)行測(cè)試。經(jīng)多種測(cè)試結(jié)果分析,該套軟件具有界面簡(jiǎn)潔、操作方便等特點(diǎn),較好地實(shí)現(xiàn)了各部分功能,具有較強(qiáng)的實(shí)用性。整個(gè)系統(tǒng)是基于Qt平臺(tái)開(kāi)發(fā)的,具有良好的可移植性和擴(kuò)展性。
參考文獻(xiàn)
[1]付松源.系留多旋翼無(wú)人機(jī)及其在戰(zhàn)術(shù)通信中的應(yīng)用[J].電子技術(shù)應(yīng)用,2018(4):14-17,22.
[2]龍文彪.系留多旋翼無(wú)人機(jī)及其應(yīng)用[J].科技創(chuàng)新導(dǎo)報(bào),2020(2):57,59.
[3]吳侹.系留多旋翼無(wú)人機(jī)通信系統(tǒng)在應(yīng)急救災(zāi)通信中的應(yīng)用[J].移動(dòng)通信,2016(15):68-71.
[4]李帥,范項(xiàng)媛.基于Qt的無(wú)人機(jī)地面站軟件系統(tǒng)的設(shè)計(jì)[J].雷達(dá)科學(xué)與技術(shù),2017(4):410-414,420.
[5]吳許夢(mèng)華,龐振岳.基于Qt的多旋翼電動(dòng)無(wú)人機(jī)地面站軟件設(shè)計(jì)與實(shí)現(xiàn)[J].飛機(jī)設(shè)計(jì),2020(3):9-13,17.
[6]寧金星,盧京潮,閆建國(guó).基于VC++的無(wú)人機(jī)飛控地面站軟件的開(kāi)發(fā)[J].計(jì)算機(jī)測(cè)量與控制,2009(3):596-598.
[7]SUMMERFIELD M.Advanced Qt programming:creating great software with C++ and Qt 4[M].London:Prentice Hall,2011.
[8]嚴(yán)赫.無(wú)人機(jī)地面站軟件的設(shè)計(jì)實(shí)現(xiàn)及其數(shù)據(jù)庫(kù)應(yīng)用[D].長(zhǎng)春:吉林大學(xué),2019.
(編輯 王永超)
Design and implementation of ground station software for tethered multi-rotor unmanned aerial vehicle based on QtSun Meijuan, Zou Tianyu, Ma Jing
(Spaceflight Shenzhou Craft Co., Ltd., Tianjin 300301, China)
Abstract: The tethered multi-rotor UAV adds tethered cables on the basis of the multi rotor UAV, so that it can be directly powered by the ground power supply. Therefore,the problem of short endurance of multi rotor UAV is solved. In this regard, a ground station software system of tethered multirotor UAV with complete functions and simple operation is developed based on Qt5.14.2. The system realizes the functions of real-time display of UAV telemetry data,telemetry command sending,fault alarm prompt, electronic map display, carrying different loads, data storage and playback. After several actual flight tests, the reliability, integrity and portability of the system functions are verified.
Key words: tethered multi-rotor; unmanned aerial vehicle; Qt; ground station software
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
中華手工(2017年2期)2017-06-06 23:00:31
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
中外會(huì)展(2014年4期)2014-11-27 07:46:46
機(jī)電信息(2014年27期)2014-02-27 15:53:56
