基于多目標優(yōu)化的加速意圖識別PHEV能量管理策略研究
2023-07-17 01:54:30李柏青劉勝永丁磊田敬北
廣西科技大學學報 2023年3期
李柏青 劉勝永 丁磊 田敬北
摘 要:為了使插電式混合動力汽車(plug-in hybrid electric vehicle,PHEV)能夠獲得更好的燃油經(jīng)濟性,本文提出了一種基于多目標優(yōu)化的加速意圖識別能量管理策略,在基于規(guī)則型能量管理策略的基礎上采用模糊控制器構建起加速意圖識別模塊,通過引入修正系數(shù)對整車需求轉矩進行實時修正,實現(xiàn)更符合駕駛員意圖的轉矩輸出,同時利用多目標粒子群算法對整車的傳動比進行優(yōu)化以提升整車燃油經(jīng)濟性,利用CRUISE軟件搭建整車模型與MATLAB/Simulink進行聯(lián)合仿真驗證策略的有效性。仿真結果表明:在世界輕型車輛測試循環(huán)(world light vehicle test cycle,WLTC)工況下,當起始動力電池荷電狀態(tài)(state of charge,SOC)為70%時,對比基于多目標優(yōu)化的加速意圖識別策略與單一的加速意圖識別策略,前者的燃油經(jīng)濟性提升了0.48%;當起始SOC為35%時,前者的燃油經(jīng)濟性提升了2.22%,由此得出基于多目標優(yōu)化的加速意圖識別策略對于提升整車燃油經(jīng)濟性具有較好的效果。
關鍵詞:插電式混合動力汽車(PHEV);加速意圖;能量管理策略;多目標粒子群算法;燃油經(jīng)濟性
中圖分類號:U471.23;U469.79 DOI:10.16375/j.cnki.cn45-1395/t.2023.03.015
0 引言
近年來隨著經(jīng)濟的不斷發(fā)展,由能源消耗帶來的一系列環(huán)境問題備受關注。出于對環(huán)境保護的需要,各國政府大力提倡發(fā)展新能源汽車。其中插電式混合動力汽車(plug-in hybrid electric vehicle,PHEV)因配備有大容量動力電池且具有通過外部電網(wǎng)充電的特點[1],兼具純電動汽車和混合動力汽車的優(yōu)點,被認為是目前最具現(xiàn)實意義的新能源車型。
PHEV的能量管理策略,可分為基于規(guī)則型能量管理策略、瞬時優(yōu)化能量管理策略和全局優(yōu)化能量管理策略三大類。莊偉超等[2-6]通過對PHEV的運行模式進行分析,將整車運行狀態(tài)分為CD(電量消耗)階段和CS(電量保持)階段,制定出基于固定門限閾值的CD-CS能量管理策略。尹安東等[7]在駕駛員的駕駛意圖基礎上,設計了相應的工作模式切換模塊。秦大同等[8]通過對比NEDC工況和整車道路試驗結果,對整車的能量管理策略進行驗證,發(fā)現(xiàn)采用基于駕駛意圖的能量管理策略更能提升燃油經(jīng)濟性。林巨廣等[9]通過設計模糊控制器對駕駛員意圖進行識別,再根據(jù)辨識出的駕駛員意圖推出符合整車運行的目標轉矩。Luo等[10]針對整車啟動時需求轉矩的大小設計了一種能夠識別駕駛員啟動意圖的控制策略。徐小東等[11]在普通模糊邏輯控制基礎上增加行駛里程輸入條件,使得整車在不同行駛里程條件下都能很好地調整發(fā)動機工作在高效區(qū),具有更好的燃油經(jīng)濟性。這種基于規(guī)則型能量管理策略簡單易行,實用性強,在當前混合動力汽車的實際能量管理中應用非常廣泛,但能耗經(jīng)濟性不如優(yōu)化型能量管理策略。尹安東等[12]通過應用粒子群智能優(yōu)化算法,對PHEV傳動系參數(shù)和控制器參數(shù)進行多目標優(yōu)化。林歆悠等[13]在一般的模糊邏輯控制的基礎上增加了粒子群優(yōu)化算法,通過仿真驗證得出對模糊控制進行優(yōu)化后的能量管理策略可以有效地提升汽車的燃油經(jīng)濟性,更好地控制電池組荷電狀態(tài)(state of charge,SOC)的變化。臧懷泉等[14]提出了一種基于禁忌搜索-免疫粒子群算法的整車模糊能量管理策略,對模糊控制器設置的當前SOC和整車的需求轉矩進行尋優(yōu)以達到合理的分配。這種基于優(yōu)化型能量管理策略可實現(xiàn)較優(yōu)的能耗經(jīng)濟性,但由于計算時間較長,實時性較差。
本文采用Cruise汽車仿真軟件搭建起整車的物理模型,在基于規(guī)則控制的能量管理策略的基礎上增添加速意圖識別模型,通過模糊控制器對輸出的需求轉矩進行修正,根據(jù)加速需要建立起自動識別的駕駛模式。構建能耗經(jīng)濟性的目標函數(shù),運用多目標粒子群算法對整車傳動比進行優(yōu)化。最后通過Cruise-Simulink聯(lián)合仿真來驗證基于多目標優(yōu)化的加速意圖識別策略對燃油經(jīng)濟性的改善效果。
1 PHEV的系統(tǒng)結構及參數(shù)設置
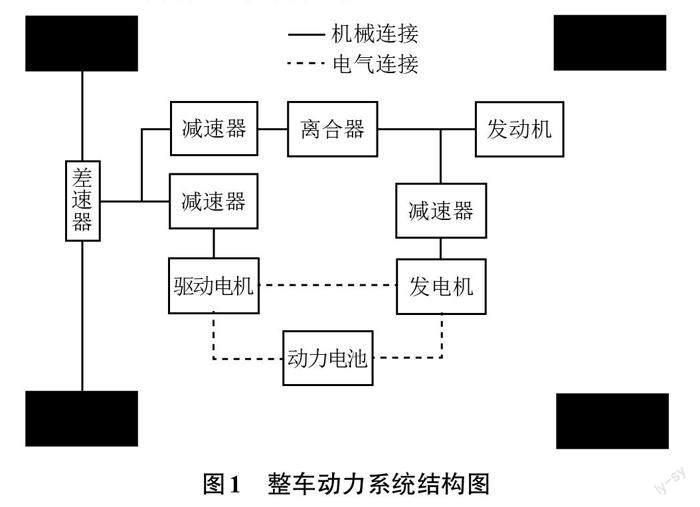
以某款混聯(lián)插電式混合動力汽車為研究對象,整車動力系統(tǒng)結構如圖1所示。其系統(tǒng)組成主要由驅動電機、發(fā)電機、發(fā)動機、動力電池、減速器、差速器、離合器等部件組成。
圖1中驅動電機、發(fā)電機、動力電池三者采用電氣連接,其余部件均為機械連接。整車參數(shù)如表1所示。
2 基于加速意圖識別策略
在傳統(tǒng)的基于規(guī)則型能量管理策略基礎上,引入模糊控制器對駕駛員的加速意圖進行識別。根據(jù)駕駛員在操控汽車加速時的緊急程度不同,可將加速意圖分為緩慢加速、正常加速、緊急加速。具體體現(xiàn)在加速踏板開度及加速踏板開度變化率上,有效地反映了汽車加速的緊急程度。
2.1 加速意圖識別
駕駛員在操控車輛進行加速行駛時,對于整車需求轉矩及功率的直接需求在于控制加速踏板的開度上,但僅根據(jù)傳統(tǒng)控制策略中對加速踏板開度的控制難以準確有效地反映出駕駛員對整車加速需求的變化。本文選取加速踏板開度u及加速踏板開度變化率du/dt作為模糊控制器的輸入量,并引入需求轉矩的修正系數(shù)k作為輸出量來構建自動判別加速意圖的模型。圖2為基于加速意圖識別的控制過程。
2.2 模糊控制器設計
1)加速踏板開度u
考慮到加速踏板開度對加速意圖的影響程度,將論域設置為u=[0,1],包括5個模糊子集,分別為非常小(VL),小(L),中(M),大(H),非常大(VH)。
2)加速踏板開度變化率du/dt
加速踏板開度變化率論域為du/dt=[-1,1],值越大代表加速需求越大,包括7個模糊子集,分別為非常小(VL),小(L),略微小(RL),中(M),略微大(RH),大(H),非常大(VH)。
3)修正系數(shù)k
為較好地體現(xiàn)在不同加速情況下對整車需求轉矩的影響,將其論域設置為k=[0,1],包括7個模糊子集,分別為非常小(VL),小(L),略微小(RL),中(M),略微大(RH),大(H),非常大(VH)。
采用Mamdani結構的模糊控制器,結合個人經(jīng)驗以及實際車輛需求設計隸屬度函數(shù)。模糊控制器輸入和輸出的隸屬度函數(shù)如圖3所示。
3 多目標粒子群優(yōu)化控制策略
從提高PHEV的燃油經(jīng)濟性出發(fā),考慮發(fā)動機的燃油消耗量和電動部件的電能消耗量,以此為目標建立起多目標粒子群優(yōu)化的能量管理策略,從而合理地分配PHEV各動力部件之間的轉矩,達到提升燃油經(jīng)濟性的效果。其優(yōu)化目標函數(shù)的表達式如下:
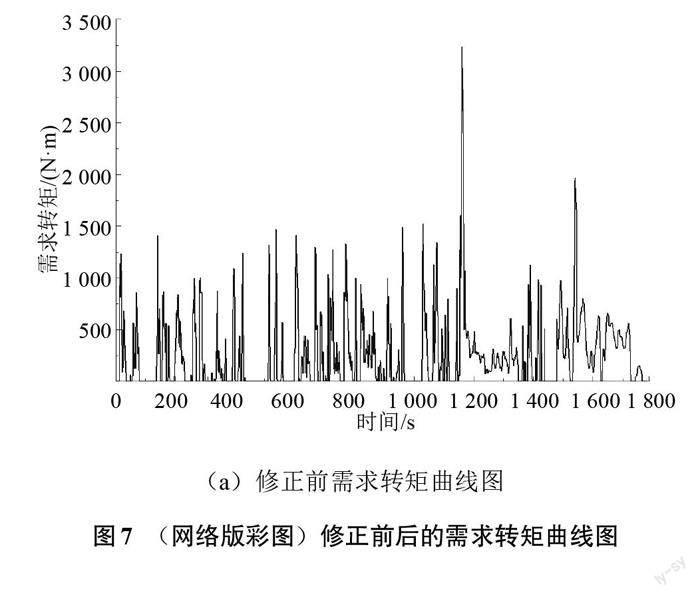
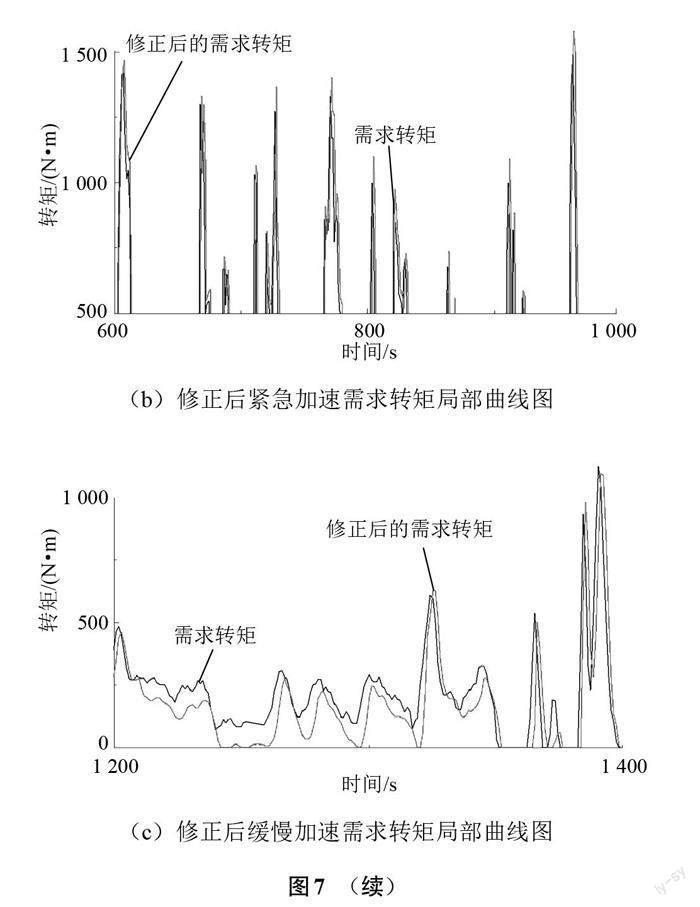
[minF(x)=[Fuel(x),Elec(x)],x=(i1,i2,i3),s.t. ? ?gj(x)≥0, ? ?j=1,2,…,n,xmini 式中:[F(x)]為優(yōu)化目標函數(shù);[Fuel(x)]為百公里燃油消耗量,單位為L/(100 km);[Elec(x)]為百公里電耗,單位為kW·h/(100 km);[i1]、[i2、i3]分別為驅動電機傳動比、發(fā)動機直驅傳動比和發(fā)動機與發(fā)電機速比;[gj(x)≥0]代表約束條件,表示車輛動力性、結構設計要求及行駛需求的參數(shù);[xmini]和[xmaxi]分別為[xi]對應的下限值和上限值。 由于整車的驅動電機傳動比、發(fā)動機直驅傳動比和發(fā)動機與發(fā)電機速比對整車性能影響較大,考慮發(fā)動機與電機的效率區(qū)間,確定了各優(yōu)化變量的上、下限值。優(yōu)化變量參數(shù)匯總如表3所示。 對于PHEV經(jīng)濟性的優(yōu)化,在選取約束條件時需要保證車輛的行駛需求符合設計要求,故采用動力性參數(shù)作為約束條件,選取百公里加速時間及最大爬坡度為約束條件建立起多目標優(yōu)化策略的模型。 優(yōu)化過程選取CD(SOC為70%)和CS(SOC為35%)2個階段,通過多目標粒子群控制算法,經(jīng)過500次迭代尋優(yōu)后找到最優(yōu)值。圖4為CS(SOC為35%)階段綜合油耗的尋優(yōu)過程。 綜合油耗是將百公里電耗折算成油耗后再加上油耗值后得出的結果。表4為優(yōu)化前后參數(shù)對比表。 4 仿真與結果分析 4.1 仿真模型建立 以某款插電式混合動力汽車為研究對象,在Cruise中搭建整車模型并設置運行工況,再將模型集成到Simulink中和控制策略聯(lián)合仿真。整車模型如圖5所示。 根據(jù)2019年發(fā)布的《中國汽車行駛工況 第1部分:輕型汽車》(GB/T 38146.1—2019)[15],采用世界輕型車輛測試循環(huán)(world light vehicle test cycle,WLTC)工況對車輛進行仿真。 4.2 仿真結果分析 根據(jù)本文提出的能量管理策略,利用Cruise在WLTC工況下分別對CD和CS這2種情況進行仿真分析。 圖6為駕駛員加速度及加速踏板開度變化曲線。根據(jù)整車運行工況的實時性,加速度及加速踏板開度也會隨之變化,能夠有效地反映出駕駛員的加速意圖。 圖7為修正前后的需求轉矩曲線圖。從圖7(b)中可以看出,當汽車處于緊急加速的狀態(tài)時,經(jīng)過模糊控制器解模糊后的修正系數(shù)為大于1的值,故汽車處于緊急加速時整車的需求轉矩要比修正前的需求轉矩大。從圖7(c)中可看出,當整車處于緩慢加速時,需求轉矩變小,修正系數(shù)為小于1 的值,故修正過后的駕駛員需求轉矩小于修正前的需求轉矩。 通過對比加速踏板開度和修正前后的需求轉矩曲線,驗證了所設計的模糊控制器可以準確地識別駕駛員的加速意圖,及時地修正符合駕駛員需求的整車轉矩。同時對比低速工況與超高速工況的初始加速時間段可看出,低速工況起步時的加速度明顯高于超高速工況起步時的加速度,對于模型識別出的2個工況所需的轉矩也說明低速工況要高于超高速工況,與實際情況相吻合。對比修正前后的需求轉矩曲線圖,可以看出修正前后的需求轉矩整體變化不大,在緊急加速階段略微增加,在平穩(wěn)加速階段略微減少,表明所設計的模糊控制器更為準確地解決了對駕駛員駕駛意圖的識別問題。 圖8是起始SOC為35%的電量保持階段能耗。在此階段應盡量減少使用驅動電機工作,盡可能采用發(fā)動機來驅使整車行駛,以此來保護蓄電池過充或過放的問題。由圖8可知,隨著燃油消耗量上升,動力電池的消耗量就會減少,在運行工況結束后,基于多目標優(yōu)化的加速意圖識別策略剩余的SOC要高于其余2種控制策略,燃油消耗量與單一駕駛意圖識別策略相近,但明顯多于基于規(guī)則型能量管理策略。結合3種策略下動力電池消耗的電能和燃油消耗量的情況計算出整車的綜合油耗后發(fā)現(xiàn),基于多目標優(yōu)化的加速意圖識別策略較其余2種控制策略有較好的燃油經(jīng)濟性。 將以上3種不同的能量管理策略進行對比,結果如表5所示。 從優(yōu)化后的結果可以看出,SOC為35%時,基于多目標優(yōu)化的加速意圖識別策略比基于加速意圖識別策略燃油經(jīng)濟性提高了2.22%,相比于基于規(guī)則型能量管理策略提高了6.95%;當起始SOC為70%時,基于多目標優(yōu)化的加速意圖識別策略比基于加速意圖識別策略燃油經(jīng)濟性僅提高了0.48%,但對比基于規(guī)則型能量管理策略,其燃油經(jīng)濟性提高了13.14%。由此表明,基于多目標優(yōu)化的加速意圖識別策略對于提高燃油經(jīng)濟性有明顯的效果。 5 結論 本文以提高PHEV燃油經(jīng)濟性為目的,考慮到傳統(tǒng)的基于規(guī)則型能量管理策略無法準確地對駕駛員的加速意圖進行實時判斷,導致燃油經(jīng)濟性降低,故引入基于加速意圖識別策略及基于多目標優(yōu)化的加速意圖識別策略來提升燃油經(jīng)濟性,具體結論如下: 1)針對駕駛員意圖識別的問題,通過設計模糊控制加速意圖識別模塊來識別加速意圖。仿真結果表明:采用模糊控制器可以較為準確地識別出駕駛員意圖,根據(jù)實時的加速意圖可提升或降低整車需求轉矩。 2)通過對比基于規(guī)則型能量管理策略、基于加速意圖識別策略和基于多目標優(yōu)化的加速意圖識別策略,發(fā)現(xiàn)基于多目標優(yōu)化的加速意圖識別策略更加符合PHEV的運行狀態(tài)。 3)通過Cruise-Simulink聯(lián)合仿真,驗證基于多目標優(yōu)化的加速意圖識別策略的燃油經(jīng)濟性。仿真結果表明:相比較于基于規(guī)則型能量管理策略和基于加速意圖識別策略,基于多目標優(yōu)化的加速意圖識別策略能夠在增強車輛對駕駛員的適應性的同時,還能有效地提升整車的燃油經(jīng)濟性。 參考文獻 [1] 孫越.我國新能源汽車分類及發(fā)展現(xiàn)狀淺析[J].汽車實用技術,2020(4):13-15. [2] 莊偉超,丁洋,邱立琦,等.插電式混合動力汽車控制策略的研究現(xiàn)狀及發(fā)展趨勢[J].機械設計與制造工程,2016,45(6):11-17. [3] HAN J H,KUM D,PARK Y.Synthesis of predictive equivalent consumption minimization strategy for hybrid electric vehicles based on closed-form solution of optimal equivalence factor[J].IEEE Transactions on Vehicular Technology,2017,66(7):5604-5616. [4] HUANG Y J,WANG H,KHAJEPOUR A,et al.Model predictive control power management strategies for HEVs:a review[J].Journal of Power Sources,2017,341:91-106. [5] 王琦,劉勝永,鄭致飛.基于模糊控制的純電動汽車能量管理策略研究[J].廣西科技大學學報,2021,32(2): 83-88,106. [6] 許佳東,高遠,袁海英.四輪轉向汽車的無模型自適應控制研究[J].廣西科技大學學報,2022,33(3):29-35. [7] 尹安東,國興.基于駕駛意圖識別的PHEV控制策略研究[J].汽車科技,2016(2):7-13. [8] 秦大同,楊官龍,胡明輝,等.基于駕駛意圖的插電式混合動力汽車能量管理策略[J].吉林大學學報(工學版),2015,45(6):1743-1750. [9] 林巨廣,顧杰,朱茂飛.基于駕駛意圖模糊識別的PHEV輸出轉矩控制的研究[J].汽車工程,2012,34(11):984-989. [10] LUO Y,WEI Y H,KAN Y Z,et al.Control strategy for electric startup of P2.5-PHEV based on slope memory and driver's startup intention[J].IEEE Access,2021,9:77044-77057. [11] 徐小東,張冰戰(zhàn).基于模糊邏輯的混合動力汽車控制策略研究[J].合肥工業(yè)大學學報(自然科學版),2012,35(6):725-728. [12] 尹安東,張宇,張冰戰(zhàn),等.基于粒子群算法的PHEV動力參數(shù)和控制策略參數(shù)優(yōu)化[J].機械傳動,2015,39(5):58-62,109. [13] 林歆悠,王召瑞.應用粒子群算法優(yōu)化模糊規(guī)則的自適應多目標控制策略[J].控制理論與應用,2021,38(6): 842-850. [14] 臧懷泉,張琦,強鵬輝,等.插電式混合動力汽車能量優(yōu)化管理策略研究[J].燕山大學學報,2020,44(4):388-396. [15] 全國汽車標準化技術委員會.中國汽車行駛工況:第1部分 輕型汽車:GB/T 38146.1—2019[S].北京:中國標準出版社,2019. PHEV energy management strategy for acceleration intention recognition based on multi-objective optimization LI Baiqing1a, LIU Shengyong*1a,2, DING Lei3, TIAN Jingbei1b (1a. School of Automation, 1b. School of Innovation and Entrepreneurship, Guangxi University of Science and Technology, Liuzhou 545616, China; 2. Guangxi Key Laboratory of Automobile Components and Vehicle (Guangxi University of Science and Technology), Liuzhou 545616, China; 3. Dongfeng Liuzhou Automobile Co., Ltd., Liuzhou 545616, China) Abstract: To achieve better fuel economy for plug-in hybrid electric vehicles (PHEV), this paper proposes an energy management strategy based on multi-objective optimization for acceleration intent recognition. On the basis of rule-based energy management strategy, a fuzzy controller is used to construct an acceleration intention recognition module. By introducing a correction factor to the vehicle's demand torque in real time, the torque output is more in line with the driver's intention. By introducing correction coefficient to correct the required torque of the vehicle in real time, the torque output more in line with the driver's intention can be achieved. Meanwhile, the multi-objective particle swarm optimization was used to optimize the vehicle transmission ratio to improve the vehicle fuel economy. The vehicle model was built with CRUISE software and MATLAB/Simulink co-simulation was conducted to verify the effectiveness of the strategy. The simulation results show that: under the world light vehicle test cycle (WLTC) condition, when the initial power battery state of charge (SOC) is 70%, the fuel economy of the acceleration intention recognition strategy based on multi-objective optimization increases by 0.48% compared with the single acceleration intention recognition strategy. While when the initial SOC is 35%, the fuel economy increases by 2.22%. It is concluded that the acceleration intention recognition strategy based on multi-objective optimization has a good effect on improving the fuel economy of the whole vehicle. Key words: plug-in hybrid electric vehicle (PHEV); acceleration intention; energy management strategy; multi-objective particle swarm optimization; fuel economy (責任編輯:黎 婭)
