基于智能控制的直驅(qū)風(fēng)電機(jī)組模擬實(shí)驗(yàn)平臺(tái)及算法研究
2023-07-17 04:00:32韋橋斌
科技風(fēng) 2023年19期
摘?要:本文設(shè)計(jì)一套2kW直驅(qū)型風(fēng)電機(jī)組模擬實(shí)驗(yàn)系統(tǒng),可以仿真各種風(fēng)況下直驅(qū)風(fēng)電機(jī)組運(yùn)行特性。針對(duì)直驅(qū)風(fēng)電機(jī)組,提出了基于Matlab優(yōu)化的變?cè)鲆孀儤刂撇呗浴K憷治霰砻魉峥刂扑惴軌蚱鸬揭种妻D(zhuǎn)速超調(diào)的作用。
關(guān)鍵詞:風(fēng)電機(jī)組;實(shí)驗(yàn)系統(tǒng);變?cè)鲆孀儤刂?/p>
1?簡(jiǎn)介
通過(guò)直驅(qū)機(jī)組實(shí)驗(yàn)系統(tǒng),不僅可以降低不成熟控制實(shí)驗(yàn)安全隱患的風(fēng)險(xiǎn),也可以解決實(shí)際風(fēng)場(chǎng)中由于風(fēng)速隨機(jī)性難以開(kāi)展實(shí)驗(yàn)的問(wèn)題[13,5]。
2?實(shí)驗(yàn)系統(tǒng)的結(jié)構(gòu)
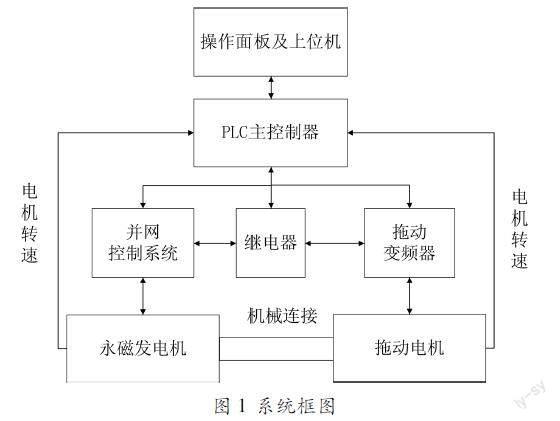
本文設(shè)計(jì)一套由PLC主控系統(tǒng)、模擬風(fēng)輪系統(tǒng)、永磁發(fā)電機(jī)系統(tǒng)、操作面板系統(tǒng)組成的2kW直驅(qū)機(jī)組物理實(shí)驗(yàn)系統(tǒng)。如圖1所示,操作面板系統(tǒng)主要進(jìn)行模式切換、啟動(dòng)、停機(jī)等工作。PLC主控系統(tǒng)主要進(jìn)行智能算法運(yùn)行,發(fā)出操作指令。模擬風(fēng)輪系統(tǒng)主要接受PLC或操作面板發(fā)出的操作指令,產(chǎn)生響應(yīng)并反饋給PLC。永磁發(fā)電機(jī)系統(tǒng)主要由拖動(dòng)電機(jī)與永磁發(fā)電機(jī)機(jī)械組成。
3?算法設(shè)計(jì)
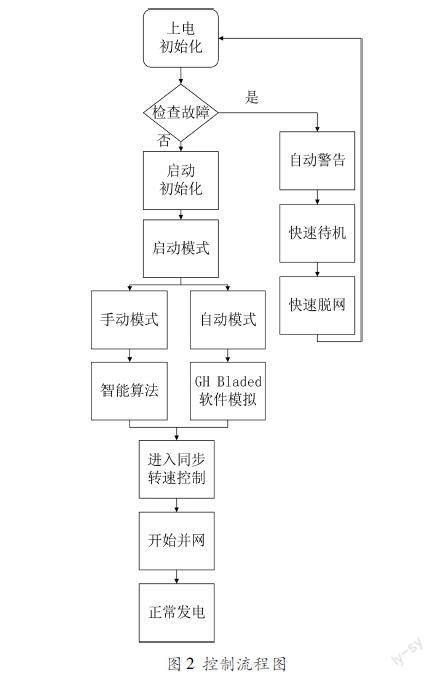
主程序控制流程如圖2所示,智能算法由電磁轉(zhuǎn)矩控制、槳距角控制和濾波器三部分組成。
3.1?電磁轉(zhuǎn)矩控制
直驅(qū)型發(fā)電機(jī)電磁轉(zhuǎn)矩方程[4]:
Te=32n·φPM·isq(1)
式(1)中,φPM為永磁體產(chǎn)生的磁鏈,isq為q軸電流,n為發(fā)電機(jī)轉(zhuǎn)子的極對(duì)數(shù)。電磁轉(zhuǎn)矩Te與q軸電流分量成正比關(guān)系。按照預(yù)先設(shè)定的工作點(diǎn)計(jì)算出電磁轉(zhuǎn)矩Te,再反推出isq。
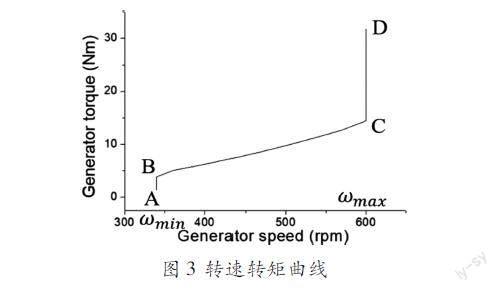
如圖3所示,當(dāng)機(jī)組在高于額定工作點(diǎn)運(yùn)行,機(jī)組電磁轉(zhuǎn)矩Te維持在額定轉(zhuǎn)矩點(diǎn)。在額定工作點(diǎn)以下運(yùn)行,電磁轉(zhuǎn)矩Te在線ABCD上運(yùn)行[68]。
當(dāng)轉(zhuǎn)速位于BC段時(shí)風(fēng)電機(jī)組追蹤最佳葉尖速比λopt。
Kopt=ρπR5Cpmax2λopt3G3(2)
Topt=Koptω2(3)
式中,ω為發(fā)電機(jī)角速度;R為葉輪半徑;G為齒輪箱速比;Kopt為轉(zhuǎn)矩最佳控制系數(shù)[911]。
3.2?槳距角控制
當(dāng)來(lái)流風(fēng)速低于額定風(fēng)速時(shí),風(fēng)電機(jī)組槳距角追蹤最優(yōu)槳距角;高于額定風(fēng)速時(shí),通過(guò)變?cè)鲆鍼I控制使控制器參數(shù)追蹤槳距角[912]。
PI變換傳遞函數(shù):
Cs=β(s)ωerr(s)=Kp2+Ki2s(4)
式中,Kp2和Ki2為PI系數(shù)。
直驅(qū)式風(fēng)電機(jī)組模型的SYSTURB結(jié)構(gòu)通過(guò)Bladed中的線性化處理得到,以下方程系數(shù)矩陣即為該結(jié)構(gòu)的A、B、C、D矩陣。
x·=Ax+Bu(5)
y=Cx+Du(6)
A=x·1x1?x·1x2?…?x·1xn
x·nx1?x·nx2?…?x·nxn?B=x·1u1?x·1u2?…?x·1um
x·nu1?x·nu2?…?x·num(7)
C=y1x1?y1x2?…?y1xn
ypx1?ypx2?…?ypxnD=y1u1?y1u2?…?y1um
ypu1?ypu2?…?ypum(8)
高于額定風(fēng)速時(shí),通過(guò)計(jì)算每個(gè)風(fēng)速點(diǎn)的參量Kp2和Ki2的最優(yōu)值來(lái)實(shí)現(xiàn)風(fēng)電機(jī)組變?cè)鲆鏄嘟强刂疲WC發(fā)電機(jī)穩(wěn)定輸出額定功率。
3.3?濾波器
機(jī)組轉(zhuǎn)速在運(yùn)行中受風(fēng)速影響隨時(shí)變化,為減少冗余動(dòng)作所采用低通濾波器形式為:
11+2ξsω+s2ω2(9)
4?計(jì)算結(jié)果對(duì)比分析
4.1?正常湍流模型
正常湍流模型下,平均風(fēng)速為8m/s時(shí)控制算法結(jié)果與Bladed仿真對(duì)比如圖4所示。
圖4(a)為槳距角對(duì)比,低于額定風(fēng)速時(shí),兩個(gè)仿真計(jì)算的槳距角都保持在最佳槳距角不變。
圖4(b)為發(fā)電機(jī)轉(zhuǎn)矩對(duì)比,可以看到與Bladed仿真得到的轉(zhuǎn)矩相比,所提算法算的轉(zhuǎn)矩更加平滑。因?yàn)橐霝V波器減少了冗余動(dòng)作。
圖4(c)為發(fā)電機(jī)轉(zhuǎn)速對(duì)比,可以看出PLC控制與Bladed仿真得到的轉(zhuǎn)速基本一致。
圖4(d)為發(fā)電量對(duì)比,可以看到控制算法仿真的發(fā)電量比Bladed仿真的發(fā)電量更加平滑。因?yàn)楣β蕿檗D(zhuǎn)速與轉(zhuǎn)矩的乘積,當(dāng)轉(zhuǎn)速一致時(shí),轉(zhuǎn)矩控制越平滑則功率控制越平滑。
4.2?極端相干陣風(fēng)
風(fēng)況:在5s內(nèi)風(fēng)速?gòu)?3m/s提升到21m/s。
圖5(a)為槳距角對(duì)比,與Bladed模擬仿真的槳距角相比控制算法所得的槳距角提前變化。這是由于不同控制算法下PI增益不同。
圖5(b)為發(fā)電機(jī)轉(zhuǎn)矩對(duì)比,可以看到高于額定風(fēng)速時(shí)轉(zhuǎn)矩均為額定轉(zhuǎn)矩。與圖3相一致。
圖5(c)為發(fā)電機(jī)轉(zhuǎn)速對(duì)比,與Bladed仿真結(jié)果相比控制算法計(jì)算的轉(zhuǎn)速曲線與機(jī)組額定轉(zhuǎn)速的偏差更小。說(shuō)明所提變?cè)鲆鍼I控制有效地規(guī)避了超速現(xiàn)象的發(fā)生。
圖5(d)為發(fā)電量對(duì)比,與Bladed仿真結(jié)果相比控制算法計(jì)算的發(fā)電量與額定功率的偏差更小。因?yàn)楣β蕿檗D(zhuǎn)速與轉(zhuǎn)矩的乘積,轉(zhuǎn)矩相同的情況下,轉(zhuǎn)速越接近額定轉(zhuǎn)速,輸出功率越接近額定功率。
5?結(jié)論
本文設(shè)計(jì)了一套2kW直驅(qū)機(jī)組實(shí)驗(yàn)平臺(tái)。該平臺(tái)可以仿真模擬各種復(fù)雜風(fēng)況下風(fēng)電機(jī)組的運(yùn)行特性;研究了最大風(fēng)能追蹤控制算法和變?cè)鲆孀儤刂扑惴ǎ煌ㄟ^(guò)對(duì)比所提控制算法與Bladed仿真結(jié)果,證明了所提控制策略的有效性。
參考文獻(xiàn):
[1]李金鵬.基于PLC控制的風(fēng)電機(jī)組物理實(shí)驗(yàn)平臺(tái)研究與設(shè)計(jì)[D].華北電力大學(xué),2013.
[2]王維.直驅(qū)能量轉(zhuǎn)換系統(tǒng)實(shí)驗(yàn)平臺(tái)的研究[D].內(nèi)蒙古科技大學(xué),2015.
[3]高劍.直驅(qū)永磁風(fēng)力發(fā)電機(jī)設(shè)計(jì)關(guān)鍵技術(shù)及應(yīng)用研究[D].湖南大學(xué),2013.
[4]徐大平,柳亦兵,呂躍剛.風(fēng)力發(fā)電原理[M].機(jī)械工業(yè)出版社,2011.
[5]李丹娜.風(fēng)輪輸出特性模擬實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)與研究[D].沈陽(yáng)工業(yè)大學(xué),2007.
[6]葉杭冶.風(fēng)力發(fā)電機(jī)組監(jiān)測(cè)與控制[M].機(jī)械工業(yè)出版社,2011.
[7]林志明,潘東浩,王貴子,等.雙饋式變速變槳風(fēng)力發(fā)電機(jī)組的轉(zhuǎn)矩控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2009(32):118124.
[8]邢作霞,陳雷,徐健,等.大型變速變距風(fēng)電機(jī)組轉(zhuǎn)矩控制策略研究[J].太陽(yáng)能學(xué)報(bào),2012,33(5):738744.
[9]王斌,吳焱,丁宏,等.變速變槳距風(fēng)電機(jī)組的高風(fēng)速變槳距控制[J].電力自動(dòng)化設(shè)備,2010,30(8):8183.
[10]王哲.大型風(fēng)電機(jī)組變槳距控制策略研究[D].沈陽(yáng)工業(yè)大學(xué),2010.
[11]應(yīng)有,許國(guó)東.基于載荷優(yōu)化的風(fēng)電機(jī)組變槳控制技術(shù)研究[J].機(jī)械工程學(xué)報(bào),2011,47(16):106111.
[12]馬蕊,鄂春良,付勛波,等.兆瓦級(jí)變速恒頻風(fēng)電機(jī)組變速變槳距控制技術(shù)研究[J].電氣傳動(dòng),2010,40(4):710.
作者簡(jiǎn)介:韋橋斌(1981—?),男,廣西百色人,學(xué)士,中級(jí)工程師,研究方向:風(fēng)力發(fā)電機(jī)組智能預(yù)警診斷。
