無人機自主滑翔中的模式切換邏輯研究
2023-07-12 01:14:24陳杰史志偉姚張奕殷鎮權葛增冉
實驗流體力學 2023年3期
陳杰,史志偉,姚張奕,殷鎮權,葛增冉
南京航空航天大學,南京 210016
0 引 言
近年來,無人機不再局限于軍事應用,在消防、測繪、植保等民用方面也應用廣泛[1-2],對航程遠、航時長且更為自主化、智能化的無人機的需求也日益迫切[3]。目前,能源系統是限制無人機飛行能力的主要因素,由于無人機的負載和動力系統會消耗大量能量,且所能攜帶的能源容量有限,導致其難以獲得理想的續航能力[3-4]。
為提高無人機的續航能力,可以對氣動外形進行優化[5-6],減小空中飛行的阻力,也可以增大翼展以提升無人機的滑翔能力,還可以在飛行器表面安裝太陽能板,通過光伏技術為無人機提供能量[7-8]。這2 種措施能夠有效提升無人機續航能力,但對于小型無人機而言,優化氣動外形難以顯著增大其續航能力。光伏技術須安裝太陽能板,這會給機翼材料增加負擔,且太陽能的獲取受天氣影響較大,對小型無人機續航能力的提升有限。
眾所周知,自然界的鳥類可以利用風能提升飛行時間和距離,如軍艦鳥、禿鷹等鳥類會借助環境中的熱上升氣流進行靜態滑翔飛行[9]。國內外研究者嘗試將其原理應用到無人機上,并取得了一定的成果。在熱上升氣流建模方面:Bencatel 等[10]總結了Chimney 和Bubble[11]2 種熱上升氣流的模型;Allen[12]對沙漠地區的熱上升氣流進行了數據統計,基于Chimney 模型建立了熱上升氣流數學模型。在無人機滑翔控制策略方面:Allen 等[13]利用飛行器的總能量狀態估計熱上升氣流的強度和位置,并基于此設計了定位氣流中心的控制方法;Wharington[14]應用強化學習設計了滑翔控制方法;Kahveci 等[15]利用LQR(Linear Quadratic Regulator)控制方法定位與跟蹤熱上升氣流中心。在設計用于控制無人機進入和脫離熱上升氣流的模式切換邏輯方面:Allen[13]和Edwards[16]等設計了能量估計器,并利用能量估計器的輸出(能量的一階和二階導數)設計模式切換邏輯。
模式切換問題是無人機利用熱上升氣流進行自主滑翔的關鍵問題之一。本文針對這一問題設計了一套基于七孔探針和嵌入式技術的氣流感知系統,并將其應用于自主滑翔的模式切換邏輯,相比于Allen 等[13]基于無人機能量設計的模式切換邏輯,本文所設計的模式切換邏輯無需對不同無人機進行動力裝置辨識建模。為驗證所設計的模式切換邏輯,在風洞中搭建了一套熱上升氣流模擬裝置,利用風洞虛擬飛行試驗平臺,分析所設計的模式切換邏輯的可行性。
1 氣流感知系統
1.1 七孔探針的結構
七孔探針的結構外形如圖1 所示。探針長度為125 mm,直徑為4.6 mm,頭部錐度為30°。從七孔探針頭部看,7 號孔位于中心,其余6 孔圍繞7 號孔均勻分布,探針體表面紅點對應1 號孔。各孔連接的導管伸出探針體的長度不同,導管由長到短依次連接1~7 號孔。
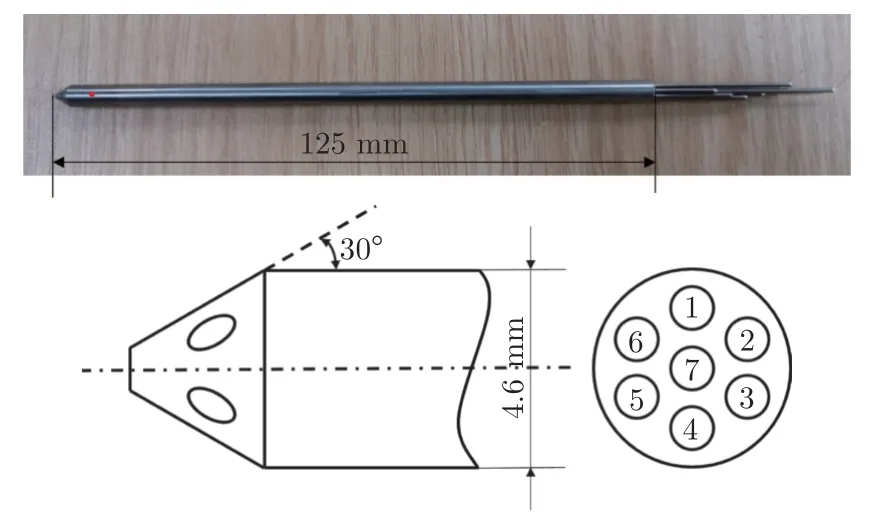
圖1 七孔探針結構外形Fig.1 Configuration of seven-hole probe
1.2 七孔探針的校準
1.2.1 流動分區
當氣流方向與探針軸線夾角很大時,會出現流動分離現象[17],如圖2 所示。按照7 個孔的壓力值,將探針頭部劃分為7 個區,7 區為內區,其余6 個區為外區。
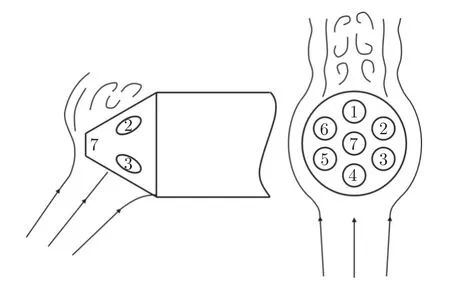
圖2 大角度下探針頭部流場Fig.2 Flow around the probe at high flow angle
1.2.2 氣流角定義
如圖3 所示,建立直角坐標系Oxyz,u、v、w 分別為流動速度在x、y、z 方向上的分量。在小流動角情況下,來流方向用迎角α 和側滑角β 表示;在大流動角情況下,來流方向用俯仰角θ 和滾轉角φ 表示。
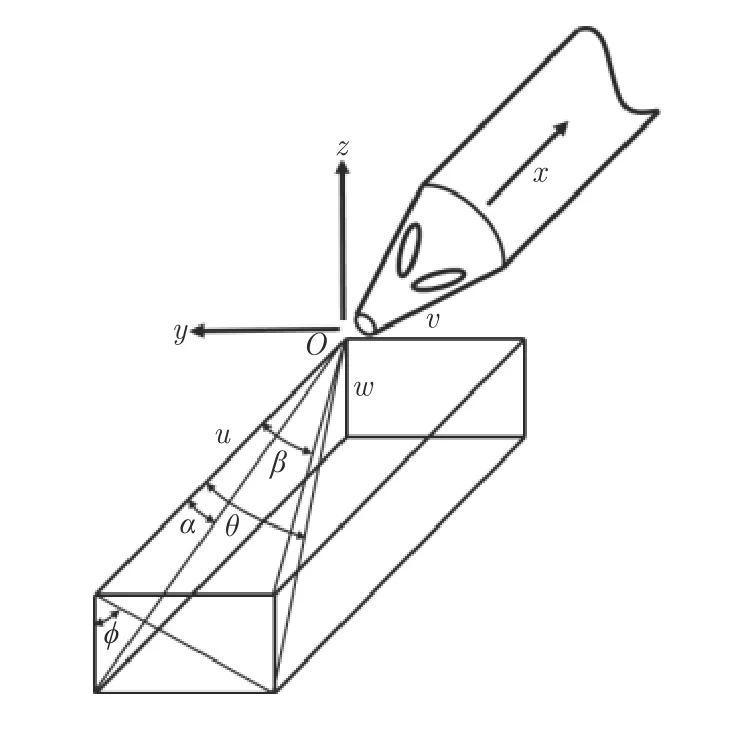
圖3 校準坐標系Fig.3 Calibration coordinate system
1.2.3 壓力系數定義
在內區,對7 個孔測得的壓力進行數據處理,定義無量綱壓力系數C1、C2、C3[18]如下:
式中:p1~p7分別為七孔探針7 個孔的壓力,為外圈6 個孔壓力的平均值。
對C1、C2、C3進行加權平均,得到迎角系數Cα和側滑角系數Cβ:
為得到來流總壓和靜壓,定義總壓系數C0和動壓系數Cq如下:
式中:p0為局部總壓,p∞為局部靜壓,校準時通過皮托管測量得到。
在外區,通過對壓力值最高的孔及其相鄰2 個孔的壓力數據進行處理,獲得俯仰角系數 Cθi、滾轉角系數 Cφi、總壓系數C0i和動壓系數Cqi如下:
式中:下標i、i+、i-分別代表外區壓力孔編號及其相鄰2 個孔的編號。
1.2.4 多項式擬合
用四次多項式表示流動參數A(即來流的方向角、總壓和動壓等)[19]。內區用Cα和Cβ作為變量,外區用Cθi和Cφi作為變量。以內區為例,多項式擬合矩陣如下:
式中:KA是流動參數A 的校準系數。
1.3 壓力數據采集處理模塊
為實現探針壓力的精確實時測量,選用體積小、重量輕的MS4515DO-DS3BK004DP 數字式壓力傳感器(圖4)。傳感器測量壓差,工作電壓3.3 V,測量頻率最快為1 kHz,量程為-996.328~996.328 Pa,輸出接口為兩線I2C 接口。
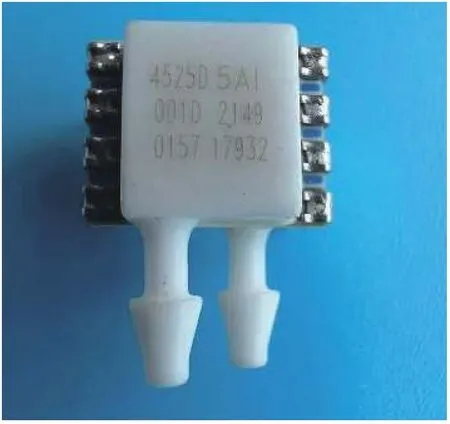
圖4 數字式壓力傳感器Fig.4 Digital pressure sensor
本文基于嵌入式技術開發了數據采集處理模塊,如圖5 所示。主控芯片為STM32F407,通過I2C連接MS4515 壓力傳感器以讀取探針的壓力數據,然后利用探針校準擬合多項式解算得到流動速度、迎角和側滑角,同時將采得的壓力數據和解算出的氣流參數通過UART 串口發送。
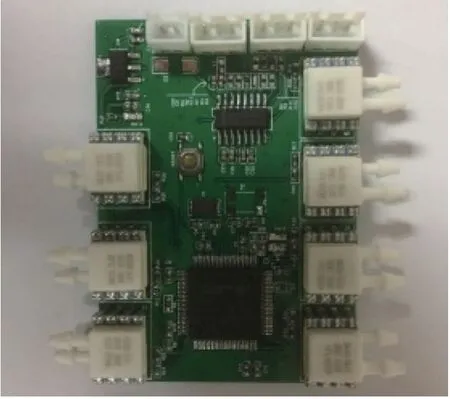
圖5 數據采集處理模塊實物圖Fig.5 Photo of data acquisition and processing module
氣流感知系統主要由七孔探針和數據采集處理模塊組成,兩者之間通過軟管連接。所設計的氣流感知系統的壓力數據采集頻率最大可達50 Hz,壓力測量時延(經過探針和軟管傳遞給傳感器,軟管越長,時延越長)不超過0.025 s。
2 試驗模型及方法
2.1 試驗模型
試驗模型是仿滑翔狀態的軍艦鳥設計的。模型全長543.2 mm,展長1 000 mm。表1 為試驗模型的幾何參數,圖6 為試驗模型設計圖和實物圖。試驗模型采用3D 打印技術加工制作,內部裝有舵機以控制舵面,頭部裝有七孔探針,內嵌數據采集處理模塊和Pixhawk 飛行控制器[20],可實現姿態解算、控制律執行和數據記錄等功能。
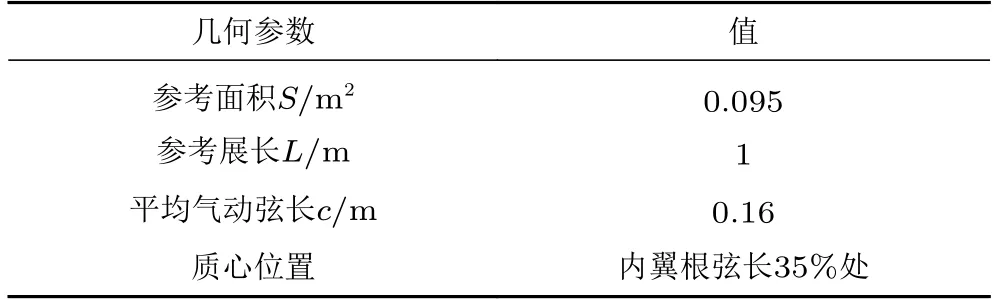
表1 試驗模型幾何參數Table 1 Geometric parameters of the test model
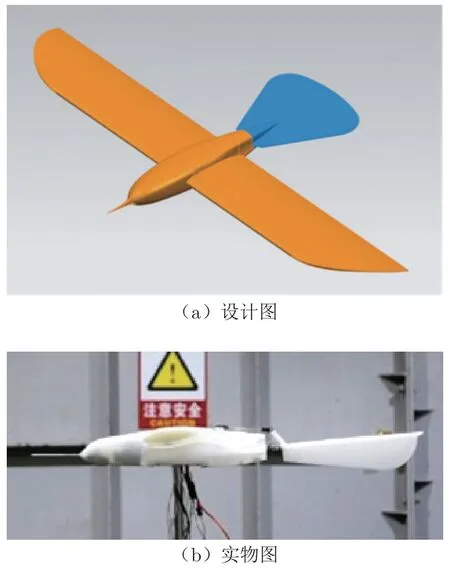
圖6 試驗模型設計圖和實物圖Fig.6 Design drawing and photo of test model
2.2 熱上升氣流模擬裝置
圖7(a)為熱上升氣流模擬裝置設計圖。該裝置由5 個部分組成:金屬底座,動力段,穩定段1、2、3。金屬底座起支撐的作用,為了制作方便,將其拆分為若干零部件進行加工。動力段放置有3 個呈等邊三角形分布的金屬涵道,用以提供氣流。穩定段1 內有蜂窩器,由方形小格子構成,穩定段1 與2、穩定段2 與3 之間布置有阻尼網。穩定段的功能在于穩定涵道產生的不均勻氣流,使旋渦衰減、速度大小和方向的分布更為均勻[21]。動力段、穩定段(包括蜂窩器)都采用3D 打印技術制作,如圖7(b)所示。熱上升氣流模擬裝置雖然裝有1 層蜂窩器和2 層阻尼網,但其出口氣流的均勻性低于常規風洞。
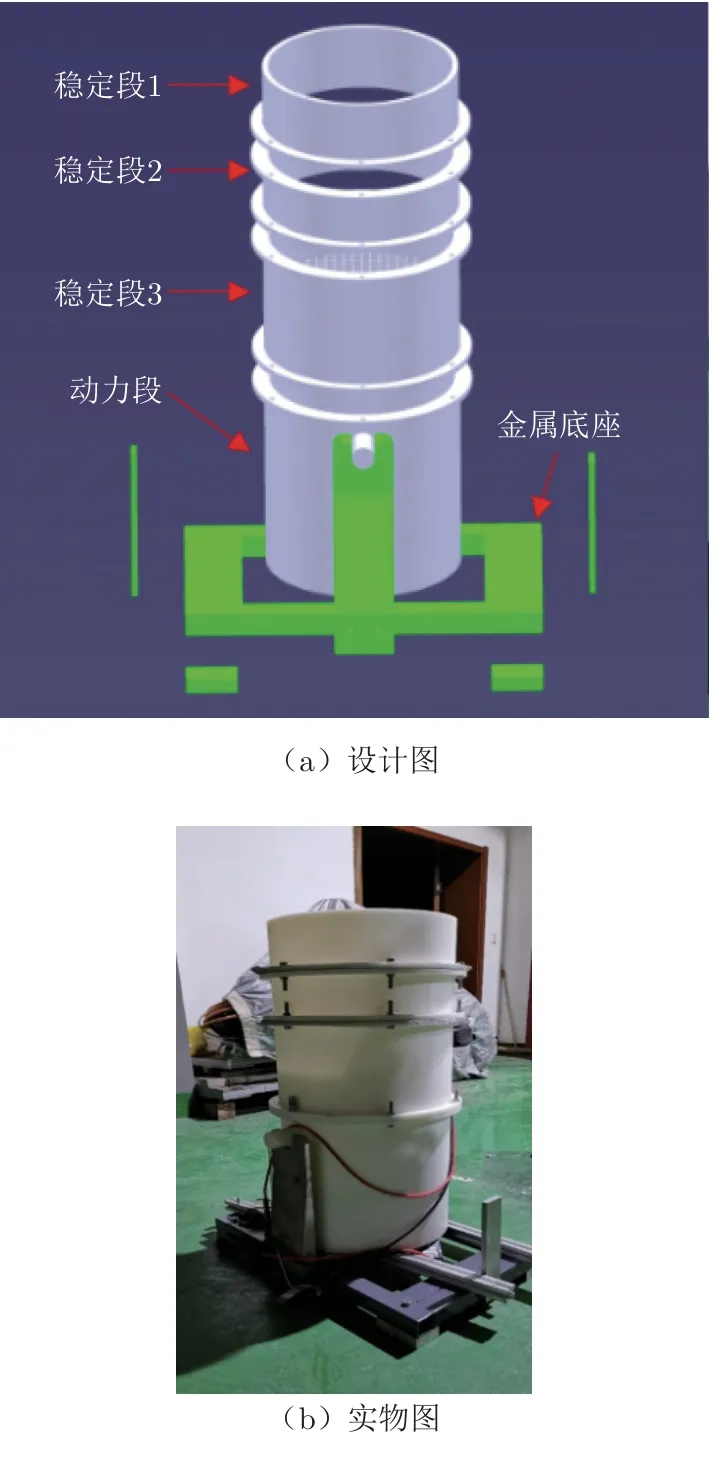
圖7 熱上升氣流模擬裝置設計圖和實物圖Fig.7 Design drawing and photo of updraft simulation device
熱上升氣流模擬裝置采用PWM(脈沖寬度調制)控制,PWM 信號通過單片機產生[22]。通過調節PWM 信號的占空比,控制動力段金屬涵道轉速,從而控制熱上升氣流速度。以直流電源為熱上升氣流模擬裝置動力段供電,工作電壓25 V。在距出口330 mm 處架設皮托管,標定該裝置產生的熱上升氣流速度,標定結果如表2 所示。

表2 熱上升氣流速度標定Table 2 Calibration of updraft velocity
2.3 模式切換邏輯
模式切換邏輯對于無人機自主滑翔非常重要:當飛行器飛經熱上升氣流區域時,須通過模式切換邏輯使飛行器進入滑翔模式,利用熱上升氣流獲取能量;當熱上升氣流不足以提供額外能量時,則須通過模式切換邏輯使飛行器脫離滑翔模式[23]。對于保持定直平飛的無人機,其飛行速度和高度變化不大,熱上升氣流影響的主要是飛行迎角及其變化率,因此,選擇飛行迎角及其變化率來設計模式切換邏輯。
典型的熱上升氣流由空氣吸收太陽輻射能引起,如圖8 所示,其在水平方向呈高斯分布,中心氣流速度最大,離中心越遠,氣流速度越小。據文獻[24]的研究,當飛行器以姿態增穩模式定直平飛經過圖8 所示的熱上升氣流區域時,迎角從α0逐漸增大,達到一定值后逐漸減小,最后再恢復到α0,如圖9 所示(圖中橫軸t 為時間,縱軸標值α0表示定直平飛時的配平迎角)。在此過程中,迎角變化率由正變負再由負變正。根據這些特征,設計如圖10 所示的模式切換邏輯。
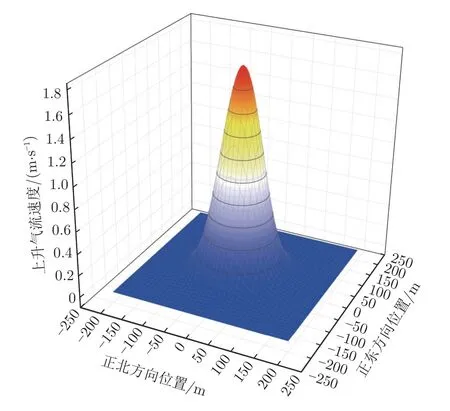
圖8 熱上升氣流三維圖Fig.8 Three-dimensional diagram of thermal updraft
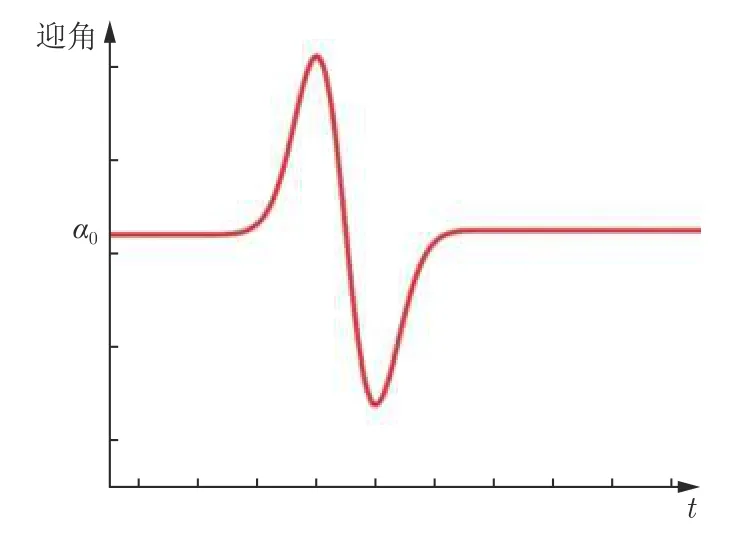
圖9 飛行器飛經熱上升氣流區域時迎角的變化情況Fig.9 Change in angle of attack when an aircraft flying through a thermal updraft
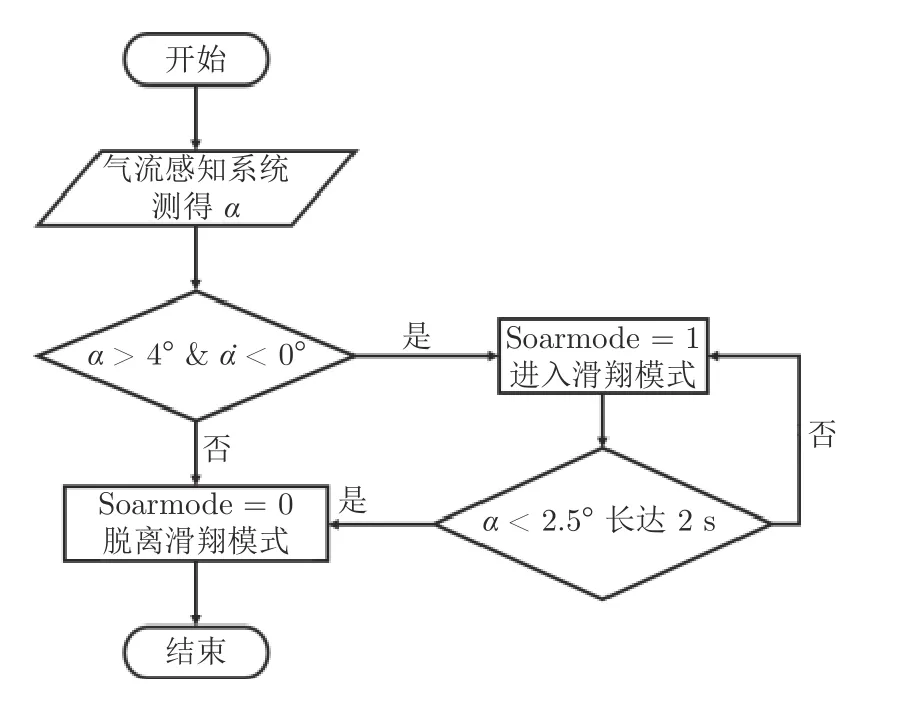
圖10 模式切換邏輯Fig.10 Mode switch logic
2.4 虛擬飛行試驗方法
虛擬飛行試驗在南京航空航天大學回流式低湍流度開口風洞中進行。該風洞開口試驗段長度為1.7 m,截面尺寸為1.5 m × 1.0 m,最大穩定風速為30 m/s。虛擬飛行試驗模型及安裝如圖11 所示。模型與模型支撐件以一個多軸承式三自由度機構(圖12)連接,該機構可使模型繞俯仰軸和滾轉軸轉動 ± 30°、繞偏航軸轉動任意角度。模型內部留有配重位置,以保證模型重心與轉動中心基本重合[25]。
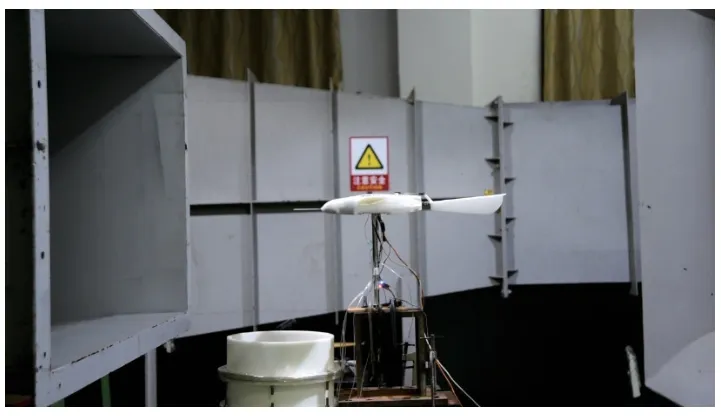
圖11 虛擬飛行試驗模型及安裝Fig.11 Virtual flight test model and installation

圖12 三自由度機構Fig.12 3 DOF structure
飛行器在飛經熱上升氣流區域的過程中,遇到的熱上升氣流的速度會先增大后減小。為模擬此現象,將熱上升氣流模擬裝置安裝于風洞試驗段下部以免影響風洞來流,裝置出口盡可能向上對準模型下表面,試驗中控制裝置產生的氣流速度先增大,再減小到某個值后持續一段時間,最后減小到0。
將模式切換邏輯寫入飛行控制器,控制熱上升氣流模擬裝置。在試驗中,觀察模式切換邏輯能否判別熱上升氣流并自主控制飛行器進入和脫離滑翔模式。據MacGready 的研究[26],飛行器遇到熱上升氣流時,可以通過盤旋長時間地停留在熱上升氣流區域。在試驗中,當模式切換邏輯判別飛行器應進入滑翔模式時,發送滾轉角指令,飛行控制器控制飛行器向一側滾轉;當模式切換邏輯判別飛行器應脫離滑翔模式時,控制飛行器滾轉角為0°,以此判別模式切換邏輯的可行性。試驗過程中,實時采集記錄迎角、姿態角、Soarmode 值等的變化情況。
3 結果與分析
3.1 七孔探針的校準結果
圖13 給出了小流動角下(7 區)豎直平面內Cα隨α 的變化曲線,圖14 給出了小流動角下(7 區)水平面內Cβ隨β 的變化曲線。從圖中可以看出:2 條曲線的線性都非常好,且都接近經過原點,斜率也基本相同。
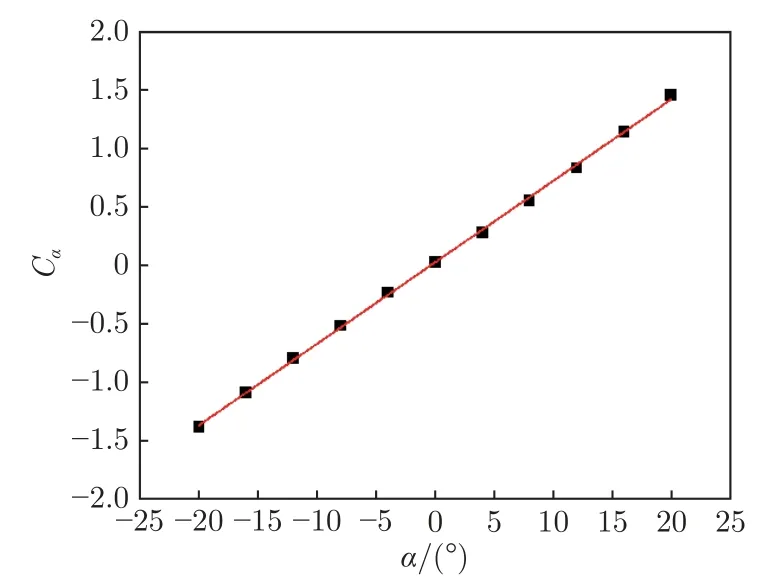
圖13 小流動角下(7 區)迎角系數曲線Fig.13 Pressure coefficient curve of angle of attack at small angle(zone 7)
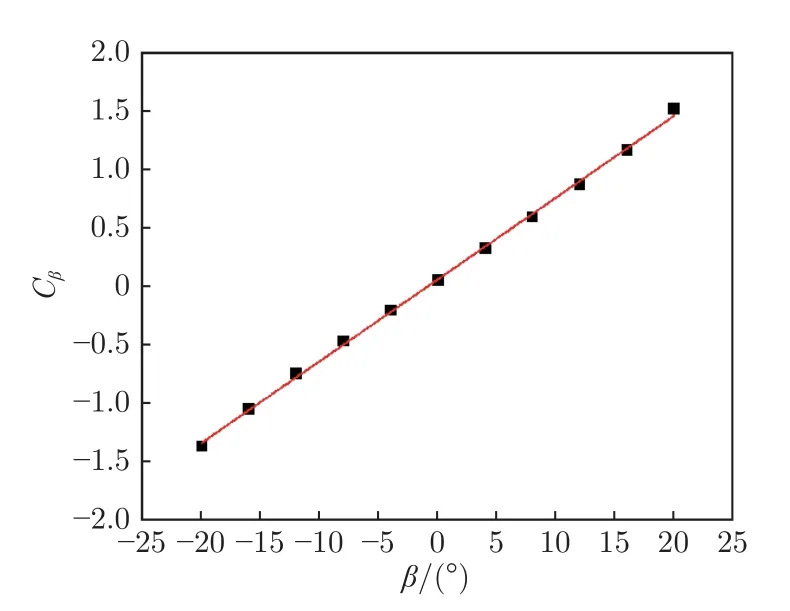
圖14 小流動角下(7 區)側滑角系數曲線Fig.14 Pressure coefficient curve of side slip angle at small angle(zone 7)
圖15 給出了大流動角下不同滾轉角所對應的1 區Cθ1隨θ 的變化情況。從圖中可以看出:當24° ≤ θ ≤ 72°時,Cθ1隨θ 單調增大;當θ >72°時,Cθ1隨θ 的增大而減小,這是由吸力開始減小、壓力回升導致的。結果表明所設計的探針可測量72°以內的俯仰角。此外,在θ < 72°的情況下,φ 為155°與205°、165°與195°、175°與185°的曲線基本重合,這表明該區Cθ1~θ 曲線對稱性很好。圖16 給出了1 區θ=60°時Cφ1隨φ 的變化情況。圖中Cφ1~φ 曲線線性度較好,且該區中心處(φ=180°)Cφ1≈ 0。其他外區的滾轉角系數曲線與1 區基本相似,這有利于多項式的擬合。
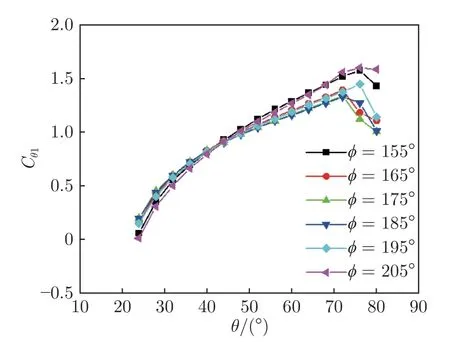
圖15 大流動角下(1 區)俯仰系數曲線Fig.15 Pitch pressure coefficient curve at high angle (zone 1)
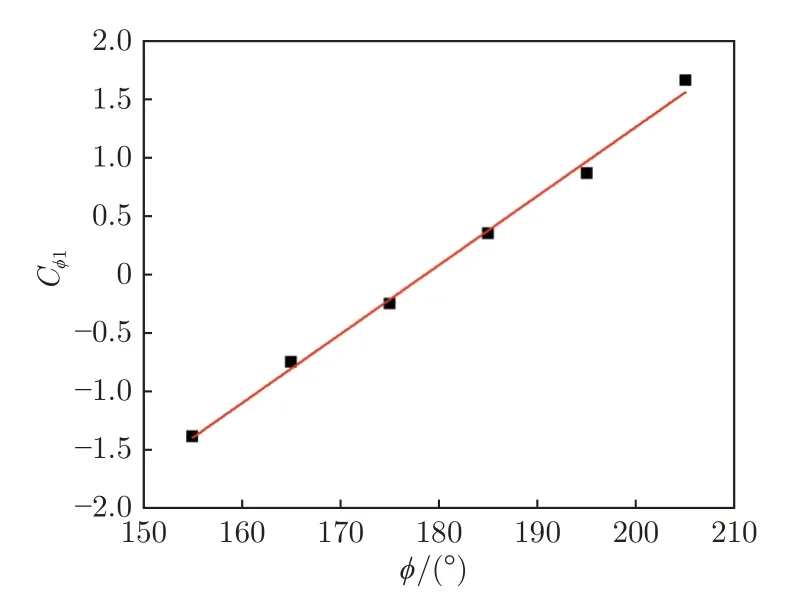
圖16 滾轉角系數曲線(1 區,θ=60°)Fig.16 Roll pressure coefficient curve (zone 1,θ=60°)
受探針加工和壓力傳感器溫漂、零漂等因素影響,校準結果難免存在誤差。根據誤差理論,采用試驗數據Ae與擬合值Ap之間的標準偏差σ(A)來衡量擬合精度,即:
各區流動參數的偏差分析結果如表3 所示,表中外區流動參數的偏差分析結果是1~6 區的平均值。可以看到:外區流動參數的擬合精度比內區略低,且標準偏差都在較小的范圍內。
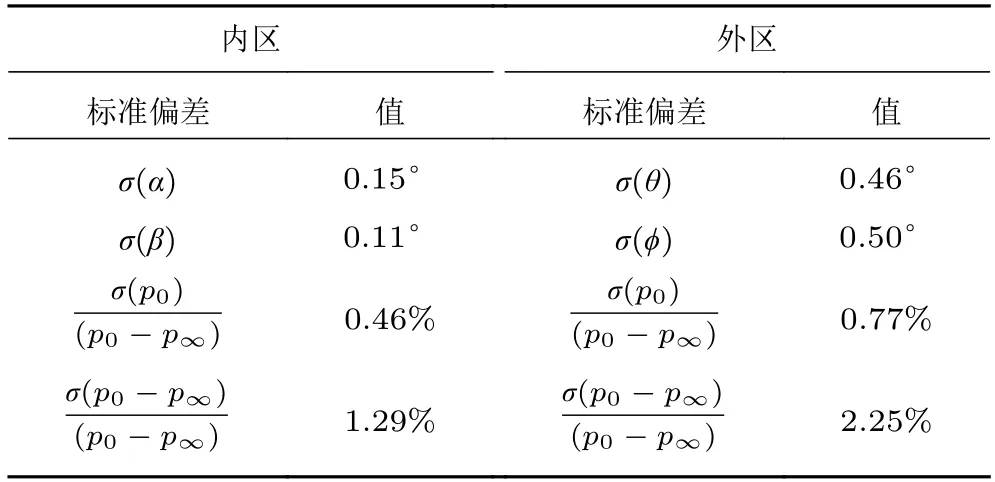
表3 七孔探針校準曲線擬合的標準偏差Table 3 Standard deviation of calibration curve fitting of seven hole probe
3.2 風洞虛擬飛行試驗
為觀察模式切換邏輯在不同速度的熱上升氣流下的可行性,開展了風洞虛擬飛行試驗。試驗中,風洞來流速度為10 m/s,熱上升氣流模擬裝置產生的氣流與風洞來流夾角為90°,設置進入滑翔模式的滾轉角指令φcmd=11.5°(0.2 rad)。試驗中,熱上升氣流裝置模擬3 種不同速度的熱上升氣流:
氣流Ⅰ:氣流速度從0 m/s 增大到4.9 m/s,再減小到2.7 m/s,維持一段時間后,減小到0 m/s;
氣流Ⅱ:氣流速度從0 m/s 增大到8.0 m/s,再減小到4.9 m/s,維持一段時間后,減小到0 m/s;
氣流Ⅲ:氣流速度從0 m/s 增大到9.8 m/s,再減小到6.6 m/s,維持一段時間后,減小到0 m/s。
圖17~19 分別是熱上升氣流Ⅰ、Ⅱ和Ⅲ的風洞虛擬飛行試驗結果,各圖的子圖(a)是控制熱上升氣流裝置的PWM 信號占空比的變化情況,子圖(b)是Soarmode 值的變化情況,子圖(c)是迎角和迎角變化率的變化情況,子圖(d)是滾轉角指令和滾轉角的變化情況。
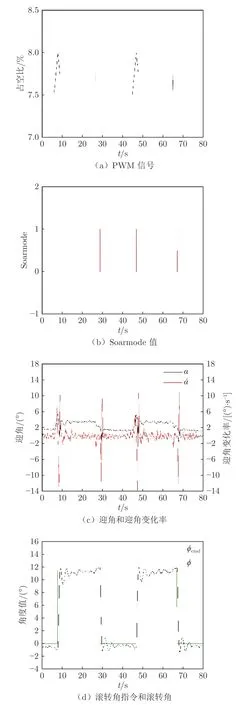
圖17 上升氣流I 的虛擬飛行試驗結果Fig.17 Experimental results of virtual flight of updraft I
從圖17(a)可以看出:在約5.8、44.6 s 處,熱上升氣流裝置啟動;在約7.8、46.6 s 處,熱上升氣流裝置產生的氣流速度達到最大值;在約26.5、64.5 s處,熱上升氣流裝置關閉。從圖17(b)可以看出:在約7.8、46.6 s 處,模式切換邏輯的Soarmode 值從0 變為1,觸發進入滑翔模式的判別條件;在約29.0、66.8 s 處,Soarmode 值從1 變為0,觸發脫離滑翔模式的判別條件。從圖17(c)可以看出:在觸發進入滑翔模式的這2 個時間點,飛行器迎角α > 4°,當α 從最大值開始減小時,迎角變化率變為負值,觸發進入滑翔模式的判別條件;結合圖17(a),在熱上升氣流裝置關閉后的27.0~29.0 s、64.8~66.8 s 這2 個2 s 的時間段內,飛行器迎角α 始終小于2.5°,觸發脫離條件。從圖17(d)可以看出:在進入滑翔模式的這2 個時間點,模式切換邏輯判別飛行器進入滑翔模式,飛行器接收到滾轉角指令φcmd=11.5°,向右滾轉到11°附近;在脫離滑翔模式的這2 個時間點,飛行器脫離滑翔模式,滾轉角回到0°附近。
圖18 和19 中也有與圖17 相似的現象,這說明在不同速度的熱上升氣流下,所設計的模式切換邏輯都能夠自主控制飛行器進入和脫離滑翔模式。
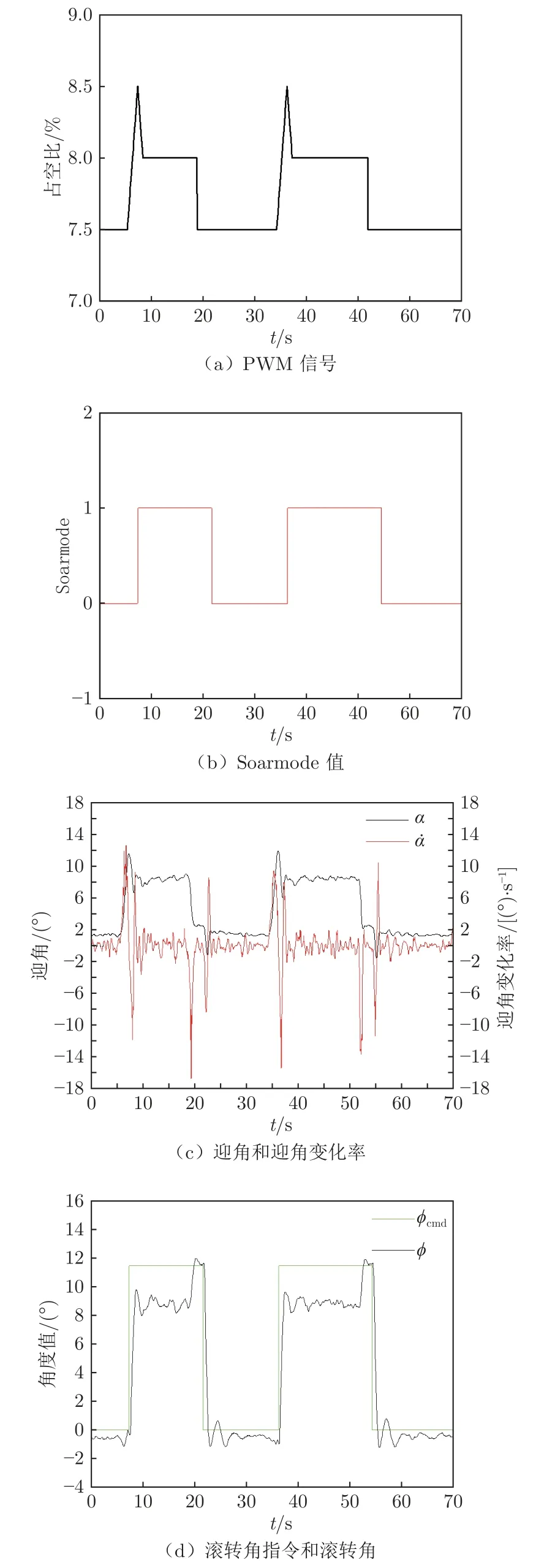
圖18 上升氣流Ⅱ的虛擬飛行試驗結果Fig.18 Experimental results of virtual flight of updraft Ⅱ
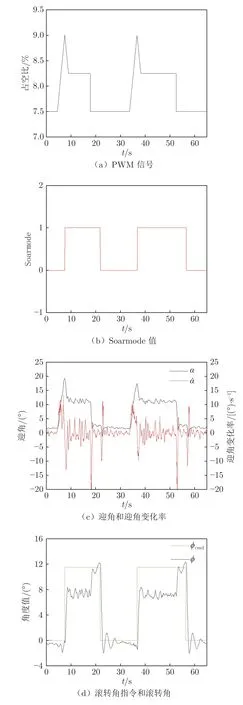
圖19 上升氣流Ⅲ的虛擬飛行試驗結果Fig.19 Experimental results of virtual flight of updraft Ⅲ
為觀察所設計的模式切換邏輯在不同滾轉角指令下能否控制飛行器自主脫離滑翔模式,開展了風洞虛擬飛行試驗。試驗中,設置風洞來流速度為10 m/s,熱上升氣流模擬裝置模擬熱上升氣流Ⅱ(與風洞來流夾角為90°),進入滑翔模式的滾轉角指令分別為φcmd=11.5°(0.2 rad)、φcmd=22.9°(0.4 rad)、φcmd=34.4°(0.6 rad)和φcmd=45.8°(0.8 rad)。
圖20 為滾轉角指令和滾轉角隨時間的變化情況。可以看到:不同的滾轉角指令下,模式切換邏輯都能夠成功地控制飛行器自主脫離滑翔模式。
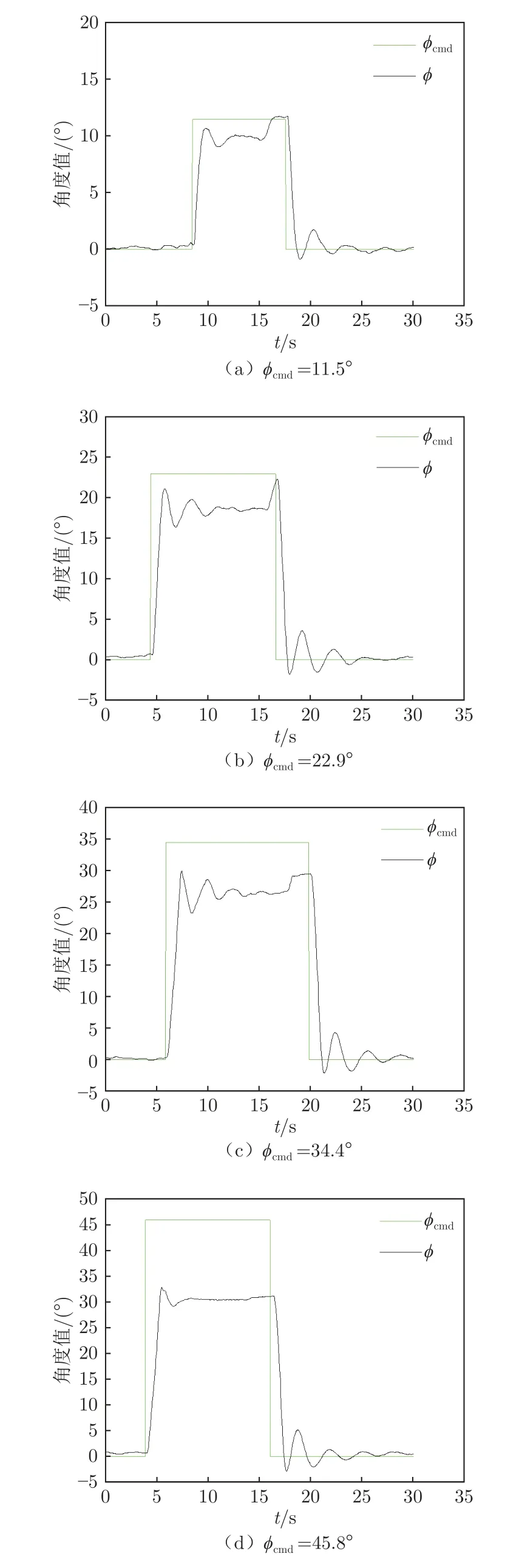
圖20 滾轉角指令和滾轉角隨時間的變化情況Fig.20 Change of roll angle command and roll angle with time
比較圖17(d)、18(d)和19(d)可以看出:熱上升氣流的速度越大,進入滑翔模式時的滾轉角與滾轉角指令的穩態誤差越大。從圖20 中可以看出:隨著滾轉角指令的增大,滾轉角與滾轉角指令的穩態誤差越來越大。出現穩態誤差的原因是:試驗模型的滾轉運動通過尾舵的左右偏轉控制,但尾舵的左右偏轉又會使模型出現偏航運動。
4 結 論
本文針對無人機自主滑翔中的模式切換問題,設計了氣流感知系統、熱上升氣流模擬裝置和模式切換邏輯,搭建了風洞虛擬飛行試驗平臺,得到結論如下:
1)基于七孔探針和嵌入式技術設計的氣流感知系統可測量流動角高達72°的氣流方向和速度,該系統測得的流動角的標準偏差小于0.5°。
2)所設計的熱上升氣流模擬裝置可模擬10 m/s以下的熱上升氣流,通過PWM 信號控制裝置模擬隨時間變化的熱上升氣流。
3)風洞虛擬飛行試驗結果表明:在不同速度的熱上升氣流作用下,模式切換邏輯都能夠控制無人機自主進入和脫離滑翔模式;在不同的滾轉角指令下,模式切換邏輯都能控制無人機脫離滑翔模式。因此基于氣流感知系統測得的迎角及其變化率所設計的模式切換邏輯能夠使無人機在遇到熱上升氣流時自主進入滑翔模式,在熱上升氣流消失時自主脫離滑翔模式。
本文所設計的氣流感知系統和模式切換邏輯可應用于通信中繼、監視和偵察等小型固定翼無人機,使其能夠在進行巡航任務時利用環境中出現的熱上升氣流節省能量,提高續航能力。