基于Burmester理論的微耕機擋土板導引機構設計*
2023-07-11 00:23:10趙業慧劉姝天廖恒王光明楊延強張宏建
中國農機化學報 2023年6期
關鍵詞:設計
趙業慧,劉姝天,廖恒,王光明,2,楊延強,張宏建,2
(1.山東農業大學機械與電子工程學院,山東泰安,271018;2.山東省園藝機械與裝備重點實驗室,山東泰安,271018)
0 引言
微耕機[1-2]因其價格低、操作簡單、使用維護方便等優點,在山地丘陵、設施園藝等大型作業機具難以進入的地域得到廣泛使用。然而微耕機在作業時易出現刀軸纏草的現象,纏草后不及時清理不僅影響作業質量,而且會增加發動機工作負荷。為了解決這一問題,以往的研究重點集中于旋耕刀纏草機理的分析和刀片形狀的優化。例如,徐良等[3]建立了雜草在旋耕刀上的纏繞力模型,并通過試驗研究了旋耕刀形狀和作業參數等因素對雜草纏繞力的影響;郝小征等[4]則對微耕機旋耕刀片和刀輥參數進行了優化設計,通過調整復合刀的擋板高度來減少刀軸纏草。然而,就目前技術水平而言,完全規避旋耕刀纏草是難以實現的,這就使得微耕機纏草的快速清理顯得尤為重要。考慮到擋土板與刀軸之間的空間過于狹小,人工清理纏草(尤其是刀軸內側附近的纏草)時操作不便,通常需要拆除擋土板以實現徹底清理,從而降低了微耕機作業效率。為了能夠在清理雜草的時候快速移除擋土板,較為理想的方法是設計一個導引機構,使擋土板能夠在其引導下快速抬起并遠離刀軸區域。考慮到近似軌跡綜合法[5-7]難以控制連架桿與機架之間的鉸鏈位置,故本文基于Burmester精確位置綜合理論[8-10]和區域類型圖方法完成前述設計。
1 擋土板導引方案
本文采用4R機構的連桿實現微耕機擋土板的剛體導引(將微耕機擋土板固定于4R機構連桿上的一點),這就需要預先確定其連桿的運動軌跡,使微耕機擋土板在運動過程中可以規避運動干涉,尤其是避免帶輪傳動罩的結構干涉。基于該設計,當需要清理旋耕刀纏草時,只需釋放擋土板使其在驅動裝置作用下按照預定軌跡抬起即可,而當微耕機作業時,則放下擋土板并將其用銷子進行固定。根據Burmester理論,給定擋土板預期運動軌跡線上的4個位置P1~P4(圖1),即可反求出所需的4R機構A0A1B1B0,使其連桿上一點E在運動過程中可以順次通過4個給定位置,從而實現前述擋土板的剛體導引。圖1中,位置P1~P4由連桿通過該位置時的導引點坐標(橫坐標x,縱坐標y)和傾角Δδ確定。
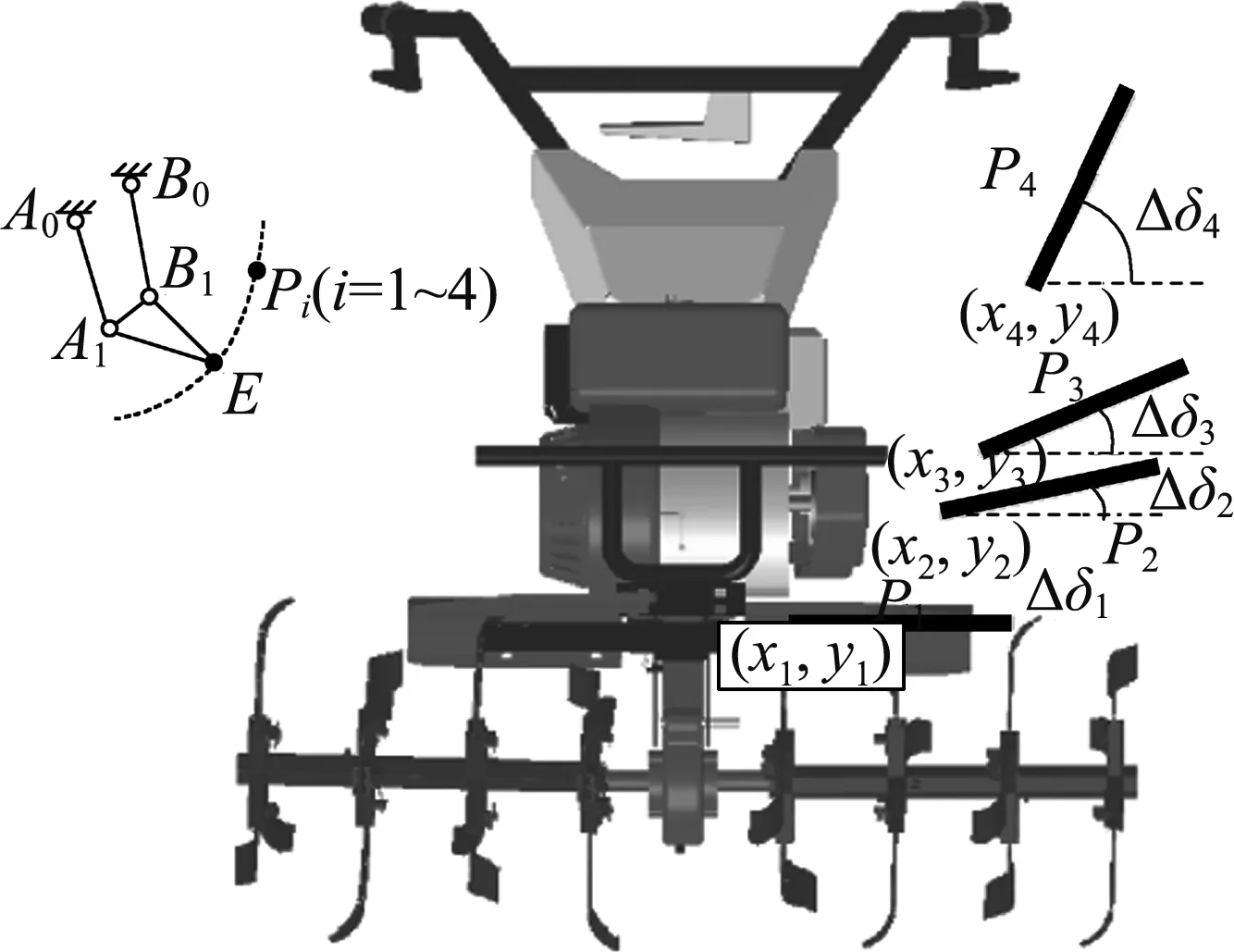
圖1 擋土板的導引任務Fig.1 Guidance task of soil-blocking plate
根據現有微耕機的主視圖投影,給出的擋土板導引位置坐標如表1所示。需要注意的是,微耕機擋土板及其導引機構共配置兩組,且相對于微耕機中線左右對稱。為方便表述,本文僅對其一側可動擋土板的設計展開討論,另一側擋土板及其導引機構只需基于微耕機中線鏡像即可獲得。
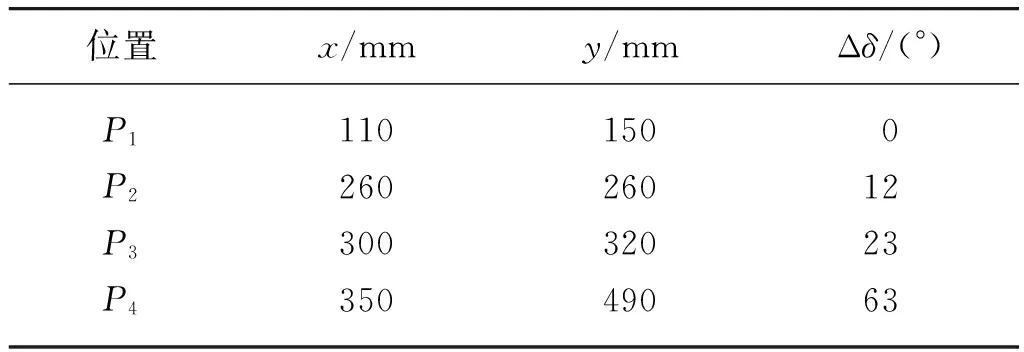
表1 擋土板的位置信息Tab.1 Position information of soil-blocking plate
2 擋土板導引機構設計
2.1 圓點曲線的生成

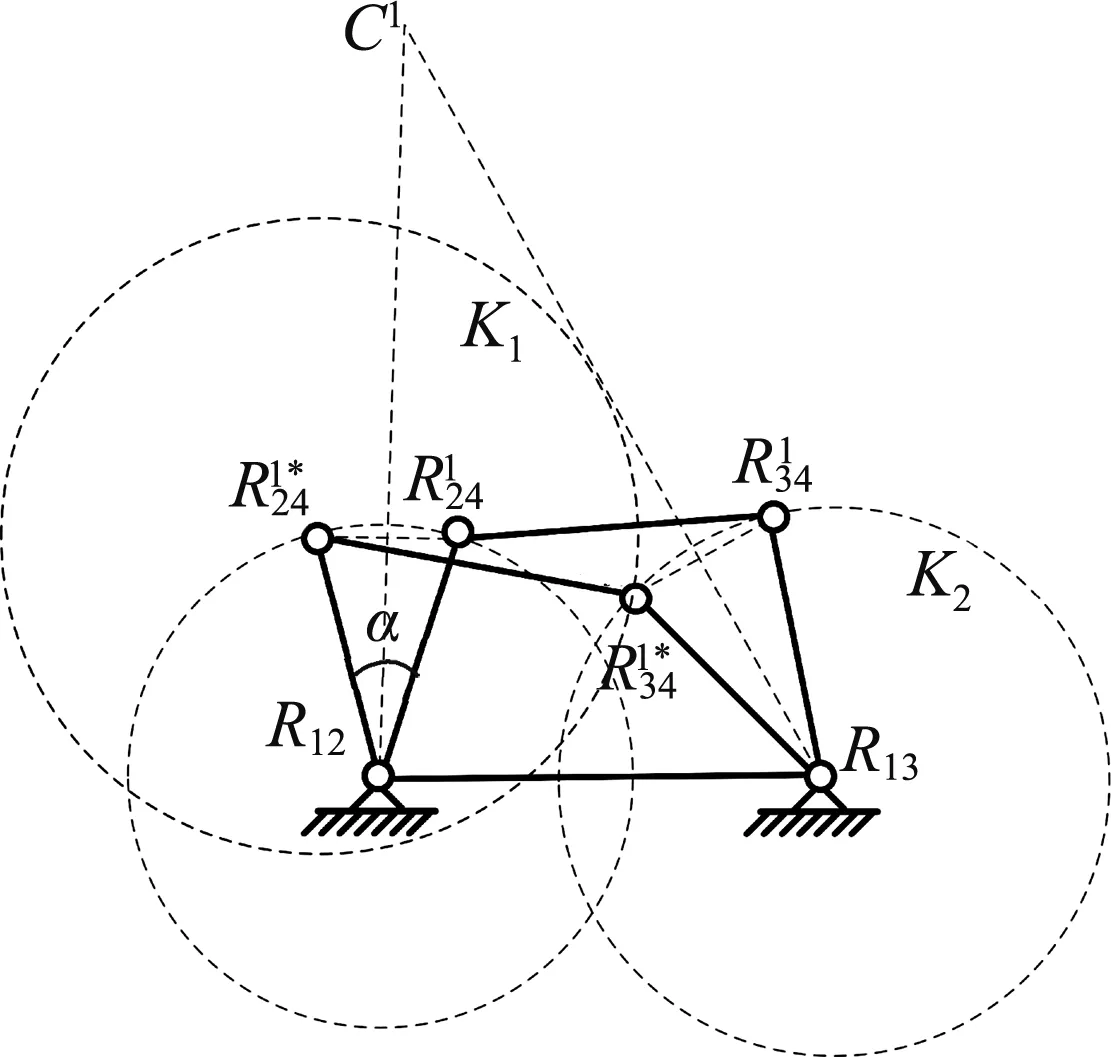
圖2 圓點的確定Fig.2 Determination of circle point
2.2 圓心曲線的生成
由極點構成的兩個極點三角形R12R13R23和R12R24R14如圖3所示。為求與圓點對應的圓心點必須得到至少3個共圓的圓點,具體過程如下[14]:首先,做圓點C1分別關于直線R12R13和直線R12R14的對稱點C123、C124,則C123關于直線R12R23和直線R13R23的鏡像點分別為圓點C2、C3,而C124關于直線R14R24的鏡像點為圓點C4;而后,任取3個圓點,圓點間連線的中垂線交點即為圓心點S1。顯然,圓點曲線中的任一圓點都可求出與之對應的圓心點,從而得到圓心點曲線。
圖3 圓心點的確定Fig.3 Determination of center point
2.3 驅動桿安裝位置的確定
本文選擇氣撐桿作為4R機構的驅動桿,并作出如下假定:(1)氣撐桿的一端鉸接于主動桿A0A1的中點;(2)當擋土板處于位置P1時,氣撐桿處于完全壓縮狀態,而當擋土板處于位置P4時,氣撐桿伸展至最大行程。在此假定下,以P1位置時主動桿與氣撐桿的連接點M為圓心,以氣撐桿完全壓縮時的中心距為半徑作圓T1,同時以P4位置時主動桿與氣撐桿的連接點為圓心,以氣撐桿完全伸展時的中心距為半徑作圓T2,則兩圓T1和T2的交點即為氣撐桿在微耕機上的安裝位置N,如圖4所示。由于兩圓T1和T2的交點數量不唯一,可能的安裝位置數量只能是0、1或者2。
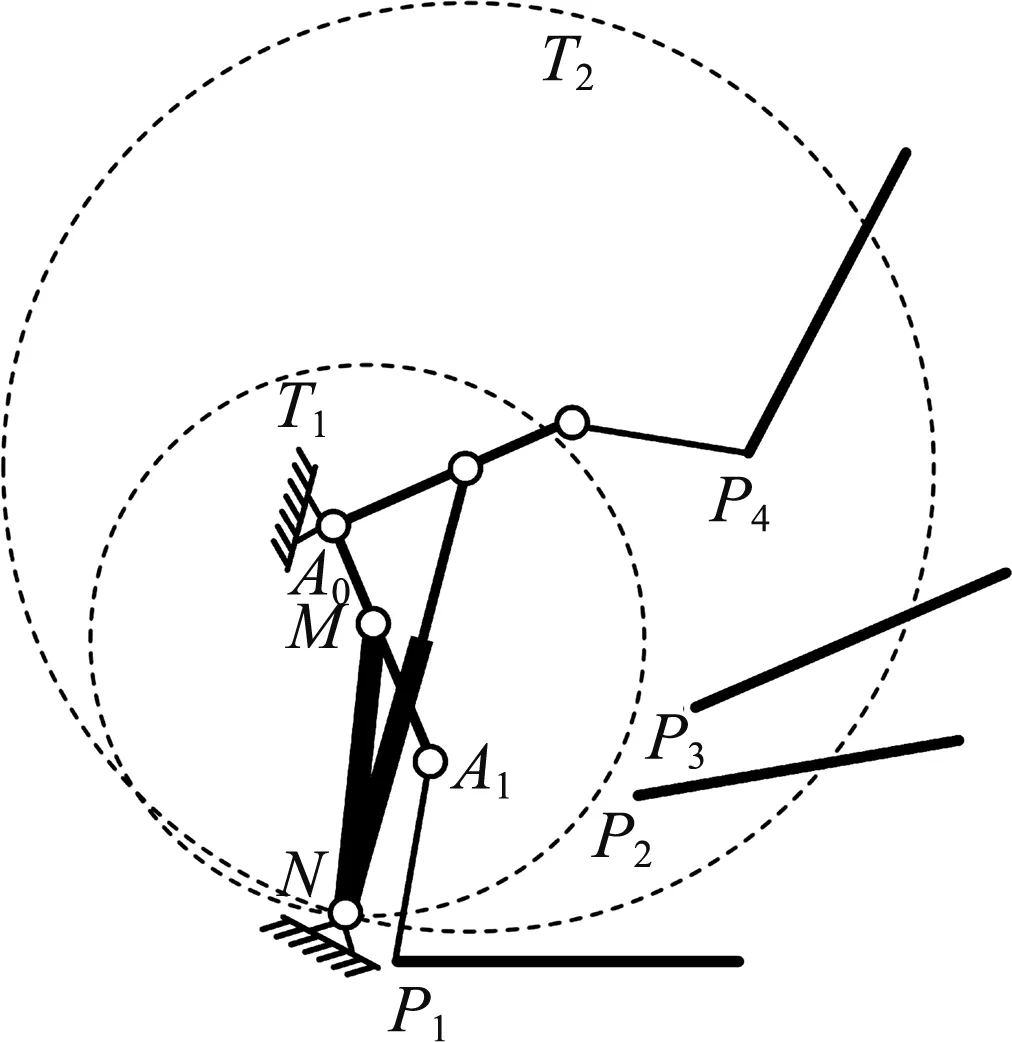
圖4 驅動桿安裝位置的確定Fig.4 Determination of driving rod installation position
2.4 Burmester點的有效性檢測
在Burmester曲線的計算階段,也就是構建類型圖之前,發現并剔除多余或者不可行的圓心點和圓點,將大幅減少后續計算量并縮小機構解的搜索范圍。Burmester點的檢測內容和取舍依據如下。
1) 最小間距要求:首先選定最靠近邊界的圓心點,將其編號為1,而后以(歐式)距離最小為原則依次將臨近的圓心點編號至圓心點的總數n,再依據編號大小對圓心點進行升序排序。在此基礎上,排除相鄰兩點間距過小的圓心點和與之對應的圓點。
2) 對稱性原則:(1)考慮到圓心點即4R機構中連架桿與機架的鉸接點,故其位置應當位于預期安裝區域以內。如前所述,微耕機擋土板及其導引機構必然存在兩組且相對于微耕機中線左右對稱,為了避免兩側機構交叉干涉,應當確保任一圓心點及其對應的4個圓點,連同4個給定的擋土板位置都應當位于微耕機中線同一側,本文將其稱之為“對稱性原則”。根據這一原則,即可對各圓心點及其附屬圓點進行判別,當圓心點或任一圓點不符合對稱性原則時則予以剔除。(2)本文將驅動桿(即氣撐桿)的設計放在Burmester曲線的處理環節。如果與圓心點對應的所有可選驅動桿的安裝位置均不符合前述對稱性原則,也應當將該圓心點及其附屬圓點予以剔除。
3) 驅動桿分支一致性:驅動桿僅能做線性伸縮運動,而4R機構的主動桿卻只能做旋轉運動。如前所述,本文假定將驅動桿安裝在主動桿上,這就要求4R機構的主動桿與驅動桿在導引運動過程中不存在分支變換問題,尤其是主動桿與驅動桿在P1位置和P4位置的分支構型應當確保一致。在圖4中,為便于研究,定義矢量H,如式(1)所示。
H=A0M×MN
(1)
式中:H——由A0點指向N點的矢量;
A0M——由A0點指向M點的矢量;
MN——由M點指向N點的矢量。
需要注意的是,向量A0M與MN均需要擴展至三維坐標系中,其第3分量均為0。當矢量H的第3分量在P1位置和P4位置的取值異號時,驅動桿與主動桿在運動過程中存在分支變換,即
H(3)(1)×H(3)(4)<0
(2)
式中:H(3)(1)、H(3)(4)——矢量H第3分量在P1位置和P4位置時的取值。
分支變換在無人工干預的情況下是無法實現的,故可判定為缺陷解。當任一可選驅動桿在安裝時均存在分支缺陷時,則相應的圓心點和圓點應當予以剔除。
通過前述檢測與處理,圓心點數量由最初的n個縮減至n*個,從而在4R機構的二桿組組合之前就已經將后續的可行解搜索范圍從n×n大幅降低至n*×n*,如圖5所示。
(a) 初始圓心曲線
3 區域類型圖求解與分析
3.1 區域類型圖方法
類型圖法最初用于全局解域分析[15-17],特點是“屬性明顯、位置隱含”,難以在選擇機構解時確保其具有恰當的安裝位置。通過前述Burmester點的區域篩選,使不符合對稱性原則的圓心點及其圓點被預先剔除。在給定的矩形區域中,將其分割為陣列n*×n*的網格,每個網格的坐標(i,j)對應于第i個圓心點和第j個圓心點及其附屬圓點所組成的4R機構解,即構成類型圖(圖6)。
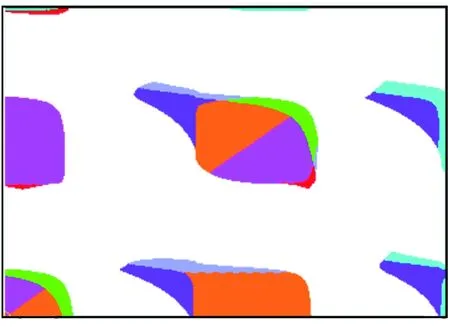
(a) 原始類型圖
由于經過前述區域篩選,區域類型圖中的所有機構解都滿足位置要求,但還需要進行回路、分支和順序缺陷甄別,具體方法參考作者前期的研究結果[18]。每個網格解的屬性(機構類型[19]、缺陷類型等)使用不同的顏色表示,如表2所示。
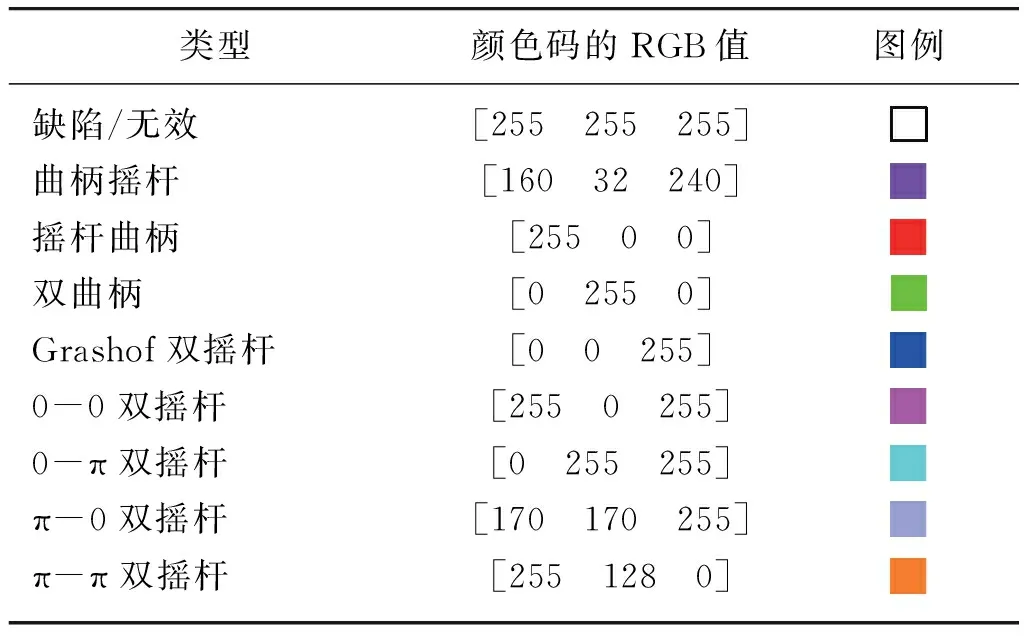
表2 區域類型圖的顏色代碼Tab.2 Color code of region type map
這樣,根據顏色導引即可在區域類型圖中選擇到潛在的可行機構解。
3.2 運動學分析
為了對所選機構解進行評價,需要對導引4R機構進行運動學分析,核心是繪制其連桿曲線。基于矢量環法與歐拉公式代換,不難求得從動桿轉角與主動桿轉角之間滿足如下關系。
Asinθ3+Bcosθ3+C=0
(3)
A=2l3(l1sinθ1-l4sinθ4)
(4)
B=2l3(l1cosθ1-l4cosθ4)
(5)
C=l22-l12-l32-l42+2l1l4cos(θ1-θ4)
(6)
式中:l1~l4——4R機構主動桿、連桿、從動桿和機架的長度,mm;
θ1、θ3、θ4——主動桿、從動桿和機架的轉角(或傾角),rad。
解算前述方程后有
(7)
求得θ3后,連同θ1,可進一步求得連桿及其導引點的位置,這里不再贅述。但需要說明的是,方程(7)存在兩個解,分別對應于4R機構的兩個分支構型。為了正確分辨和確認機構解的分支缺陷,需要對兩個分支分別求解并予以區分。
3.3 程序設計與求解
基于前述算法編寫的導引機構求解程序如圖7所示。在輸入導引任務(表1所示擋土板位置信息)后,由程序生成區域類型圖和可用驅動桿(即氣撐桿)選項。程序內置了23種常用規格的氣撐桿數據,在Burmester曲線計算階段即對無法滿足要求的氣撐桿進行了標記,并預先剔除掉無可用氣撐桿的圓心點和圓點(參考第2.5節),該部分的計算流程圖如圖8所示。

圖7 剛體導引的計算程序Fig.7 Calculation program for rigid body guidance
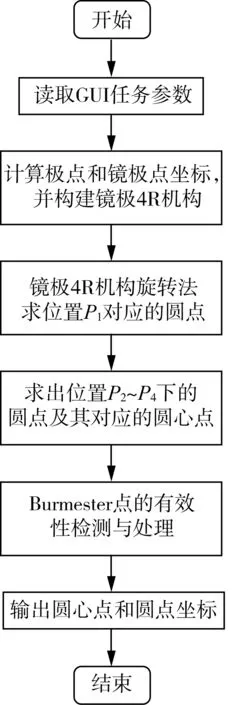
圖8 Burmester點的計算流程圖Fig.8 Flow chart of Burmester point calculation
通過X軸滑塊和Y軸滑塊移動區域類型圖中的定位游標,即可定位到所需的候選解。定位游標通過所在網格的顏色指示每個解的類型屬性和缺陷屬性。選定候選解后,圖形顯示區會自動顯示所選4R機構的安裝情況和導引軌跡,與此同時,驅動桿選擇區會通過列表顯示出可用的氣撐桿及其規格數據。當某型號的氣撐桿被選擇后,圖形顯示區將顯示氣撐桿的安裝位置。最終,導引機構和氣撐桿的安裝信息和屬性信息會在結果輸出區域輸出。
根據前述方法獲得的導引機構解并不唯一,可根據后續分析做進一步篩選。其中一組典型解如圖9所示,該機構解在P1位置時的坐標信息為A0(30.233 7,473.404)、A1(98.354,261.839)、B0(81.452 4,471.107)、B1(143.714,282.839)、N(8.758 17,144.427),各桿件的桿長如表3所示,其所使用的氣撐桿規格如表4所示。
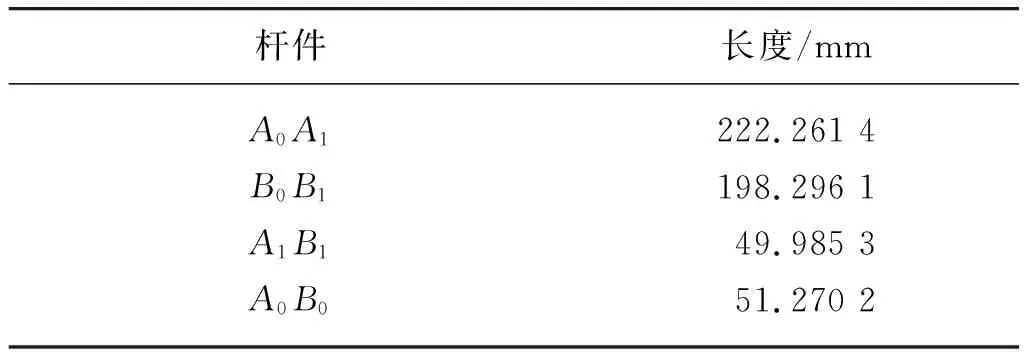
表3 各桿件的桿長Tab.3 Rod length of each rod
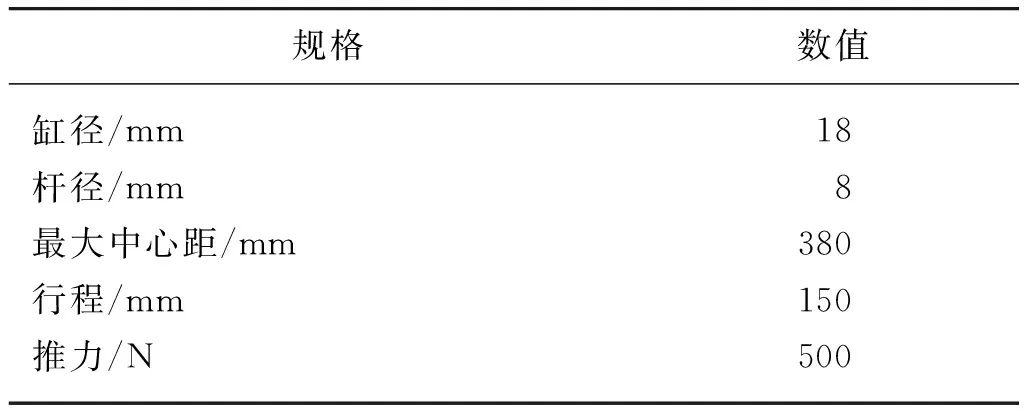
表4 氣撐桿規格Tab.4 Specification of pneumatic lifting bar
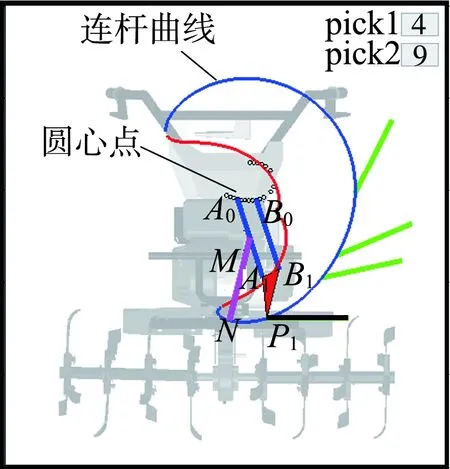
(a) 連桿通過位置P1
由圖9可知,當需要清理刀軸纏草時,所設計的可動擋土板可在4R機構和氣撐桿作用下升起,其擋土板在運動過程中可順次通過4個給定位置P1~P4,從而避開機體結構障礙。不僅如此,整個機構自始至終都在微耕機中線一側運動,從而避免兩側機構交叉干涉。由表3、表4可知,主動桿、從動桿、連桿和連架桿長度分別為222.261 4 mm、198.296 1 mm、49.985 3 mm和51.270 2 mm,最終確定的氣撐桿最大中心距為380 mm、行程為150 mm。
4 結論
1) 本文提出了微耕機可動擋土板的設計方案,使用4R機構的連桿實現擋土板的導引運動,并使用氣撐桿驅動4R機構的主動桿旋轉,可在需要清理纏草的時候釋放擋土板使其抬起,從而提升微耕機的纏草清理效率。
2) 基于鏡極4R機構旋轉法和所提出的區域類型圖法實現了微耕機擋土板導引機構的剛體導引設計,不僅可以快速排除不符合“對稱性原則”的Burmester曲線點,而且可以精準定位到滿足類型和無缺陷條件的機構解,從而大幅提升設計效率。
3) 在此前的工作中,4R機構剛體導引與驅動桿設計是分開進行的,驅動桿在設計時盲目性較大,需要反復嘗試比對,甚至需要推翻已經獲得的機構綜合方案。而本文將驅動桿的設計放在Burmester曲線點的檢測環節,從而大幅減輕了剛體導引設計后的機構解分析工作量。
4) 開發了以鏡極4R機構旋轉、驅動桿優選和區域類型圖為核心算法的微耕機擋土板設計程序,并對設計結果進行了運動學分析驗證。最終確定的主動桿、從動桿、連桿和連架桿長度分別為222.261 4 mm、198.296 1 mm、49.985 3 mm和51.270 2 mm,最終確定的氣撐桿最大中心距為380 mm、行程為150 mm。
5) 除了微耕機擋土板導引機構,本文研究方法和設計理論同樣可以解決其他農機設計中的剛體導引問題。在接下來的工作中,將重點對剛體導引中的動力學問題展開研究,從而在剛體導引計算時充分考慮驅動桿的受力情況。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
