基于STM32非接觸物體尺寸形態測量系統的設計與實現
2023-07-10 09:29:15邱萌萌劉瑞徐林沈洋洋
電腦知識與技術 2023年14期
邱萌萌 劉瑞 徐林 沈洋洋

關鍵詞:STM32;openmv4;超聲波測距;電源;舵機
中圖分類號:TM938 文獻標識碼: A
文章編號:1009-3044(2023)14-0022-03
0 引言
工業的迅速發展與測量技術水平的提高是密不可分的,尤其是對機械工件的加工精度要求顯得尤為重要,其測量技術的發展離不開科學技術的發展,縱觀生產發展的歷史,伴隨著對加工精度要求的提高,測量技術也在不斷地完善和發展。
為了高效生產、保護被測物體表面不被劃傷,非接觸測量技術應運而生,尤其對柔軟物體測量較為重要,同時也為機械、計算機、電子和光學產業的飛躍發展奠定了基礎,由于它具有非接觸、高速度和高精度的優點,因此成為檢測技術發展主流方向。
目前非接觸測量技術發展如此迅速,主要有以下三個方面:第一是超聲波測量技術,該技術應用較多,主要是不受各種環境以及磁場干擾的影響、成本低廉、測量精度較高、運行頻率適中等優勢,因此超聲波測量技術發展較快,但是這種技術也有兩面性,其缺點也不容小覷,比如受空氣介質、聲速等因素影響較明顯,魯棒性差,由于測試電路較為復雜,若要較高測量精度,需要另外多種補償即可。第二是激光尺寸測量技術,該技術測量精度較高,可達到0.5μm,發展比較成熟,分辨率較高、魯棒性強,測量范圍較廣;同時這種技術也存在弊端,即這種技術對設備的結構要求較復雜,成本昂貴,對環境指標有一定的要求,更不便于維護等[1]。第三是圖像測量技術,即CCD(ChargeCoupled Devices)是一種傳感器件,它具有高分辨率、高靈敏度等特征,在進行測量時,所需機械運動結構比較簡單,而且采用非接觸式,因此減少了誤差存在的源頭,特別適用于小尺寸物體的測量有較為明顯的優勢。
以STM32為控制核心的非接觸物體測量系統中,特別適用于小尺寸物體的測量,在工程檢測領域體現出明顯優勢。在非接觸測量中利用圖像測量技術對小尺寸進行測量可以克服傳統測量方法中出現的一些問題,它不僅具有測量精度高、成本低廉、方便維護、操作簡單等優點,還能夠實現高效率、智能化、動態測量,同時滿足非接觸測量的需求。因此,將圖像測量技術應用于幾何測量,是今后幾何測量技術的重要發展方向之一。
1 系統的總體架構
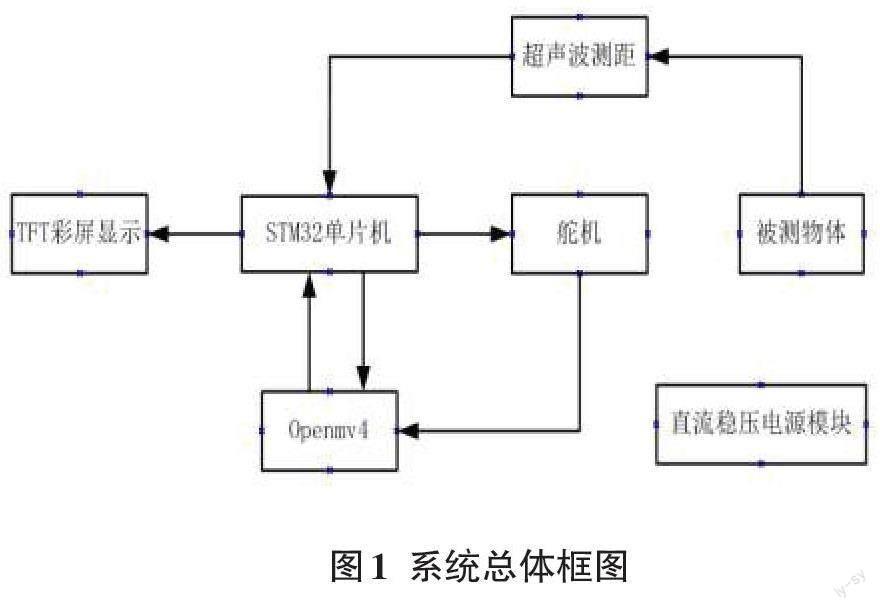
本系統主要由STM32F103型號的單片機作為主控核心、用攝像頭作為圖像采集模塊、利用超聲波模塊完成測距功能、同時電機及其控制模塊實現動態檢測、采用的直流穩壓電源模塊實現系統供電的穩定等模塊組成。系統設計方案[2]如圖1所示。下面分別介紹所采用的各模塊的相關參數。
1.1 主控模塊
采用的STM32F103ZET6 作為主控制模塊。STM32F103ZET6是一款性價比較高的單片機,存儲器內存相對較大,有多個定時器和通信接口,工作頻率高,運行速度快。相較于AT89C51型號的單片機雖然具有結構簡單、低成本、資源較豐富等優點,但是僅有8位控制器的51系列單片機,由于它的資源有限,運行速度稍顯不足,難以存儲大體積的程序和實現快速精準的反應控制。由于系統中使用攝像頭模塊,需要有較快的處理速度,較多的I/O口和較大的存儲器內存[3],所以采用STM32 作為主控模塊,其封裝如圖2 所示。
1.2 攝像頭
采用OpenMV4攝像頭,使用OpenMV4圖像處理模塊時,由于它是開源、低成本、功能強大的機器視覺模塊,可以在單片機中運行,提供Python編程接口,常用算法有相關庫提供支持,底層功能無須自己實現,適合快速開發。相較于OV7725 COMS攝像頭,它屬于數字攝像頭,具有高達150Hz幀頻率,采用BGA封裝,還具有較高分辨率,性能穩定等特點。但是它靈敏度低,不適合高速運行。由于本系統要實現攝像頭對物體的快速識別,OpenMV4攝像頭更為適合。
1.3 超聲波測距
超聲波測距廣泛應用于各種測距場景。由于其成本低廉,測量精度能夠滿足大多數場景的需求;雖然激光測距指向性好,測量精度高,并且量程較遠,但是激光測距傳感器成本高。由于本系統測距只需要3 米左右,為了節約成本,所以選擇常用的超聲波測距。
1.4 電機
雖然直流電機力矩大,調速范圍廣,動態特性好,傳遞函數較為簡單,速度快,但只能對轉速進行控制,可控性差,較難控制電機停止位置。而步進電機可以實現開環控制,無須反饋信號,適合高精度的控制,使用時短距離頻繁動作較佳,但控制復雜、延遲值高、轉速慢,扭矩小,且動態特性差,難以處理,不適合實時控制。最終選用的舵機,具有較高的穩定性,控制簡單,扭力大,成本低,可以提供更好的精度和更好的固定力量,并且防抖動性能優越,響應速度快,適合實時控制[4]。由于需要在攝像頭裝置需要在短時間內自動尋找目標后并保持穩定,所以采用舵機來驅動。
2 理論分析與計算
通過攝像頭來進行識別所要識別的物體的形狀,記錄在此位置所占像素的比例如10×10、20×20等,再用超聲波測量出攝像頭與所測物體的距離,可以計算出像素和距離之間的常數K。從而就可以憑借常數K,計算出在測量范圍內任何一處物體的尺寸大小,下面進行不同測量方法與分析。
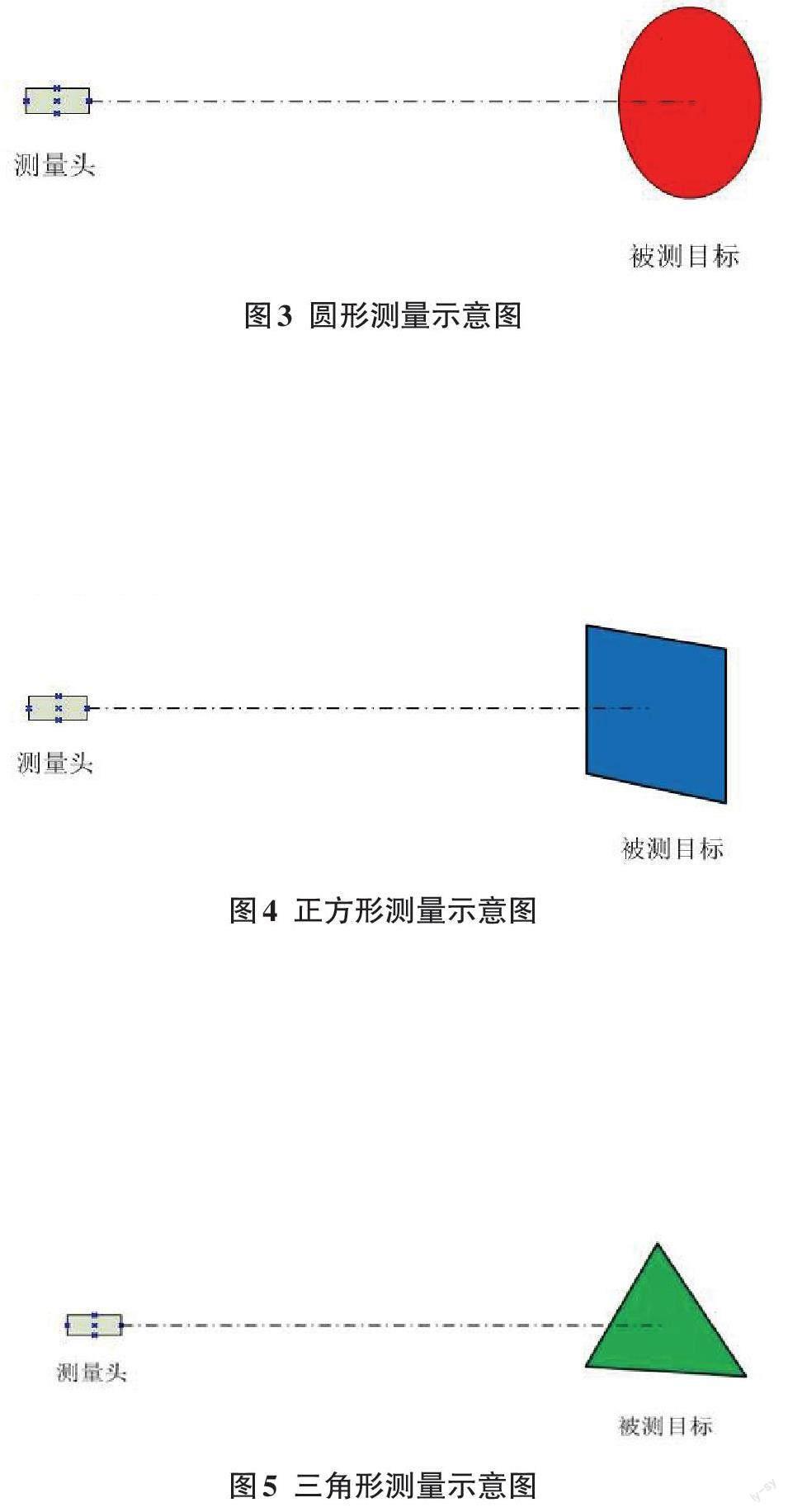
2.1 圓形測量
任意一種顏色的圓形,放置在被測區,按下測量鍵,攝像頭識別被測物體,超聲波測距,在TFT彩屏上顯示圓的直徑,形狀和目標與測量頭的距離。如圖3 所示。
2.2正方形測量
任意一種顏色的正方形,放置在被測區,按下測量鍵,攝像頭識別被測物體,超聲波測距,在TFT彩屏上顯示正方形的邊長,形狀和目標與測量頭的距離。如圖4所示。
2.3三角形測量
任意一種顏色的三角形,放置在被測區,按下測量鍵,攝像頭識別被測物體,超聲波測距,在TFT彩屏上顯示三角的邊長,形狀和目標與測量頭的距離,如圖5所示。
3 各電路模塊及原理
3.1 攝像頭圖像采集模塊
鏡頭首先采集被測物體,并將其生成光學圖像,然后將圖像投射至傳感器,同時轉為電信號,再經過A/D轉換器轉成圖像的數字信息[5],最后將數字信息傳送至芯片進行數據的處理。Openmv4可以在單片機中運行,并且常用算法有相關庫提供支持,底層功能無須自己實現,適合快速開發。因此非常適合物體尺寸形態的測量。
3.2 超聲波測距模塊
超聲波測距與雷達測距原理雷同,它是通過超聲波發射器朝向某方向發射超聲波,同時開始計時,在傳播的途中遇到障礙物立即“反射”回去,當超聲波的接收器收到反射波時,立即停止計時,即距離L=vt/2 計算得出[6],如圖6為超聲波測距原理圖[7]。
3.3 舵機模塊
舵機的伺服系統由可變寬度的脈沖來進行控制,控制線路是用來傳送脈沖,進行控制電機工作。其工作原理是:通過電機工作帶動齒輪組,當完成減速后,傳動至輸出舵盤,由于舵機輸出軸和位置反饋電位計相連,因此舵盤轉動的同時,反饋電位計也在轉動,同時將輸出電壓信號傳送至控制電路板,完成反饋。最終控制電路板根據目標位置決定電機轉動及轉速,當到達目標位置立即停止[8]。可以實現對攝像頭的控制,如圖7為舵機原理圖。
4 系統測試及結論
4.1測試方案
1)隨機選擇一個形狀的平面目標,放在被測目標放置區的中心線位置上,攝像頭識別物體以后,按測量鍵后開始測量,測量出該目標物體邊長、幾何形狀和目標與測量頭的距離,顯示在TFT彩屏上。
2)攝像頭處于中心線方向,在目標放置區隨機選擇位置放一個物體,按下測量鍵后,攝像頭裝置自動尋找目標,測量出該目標物體邊長、幾何形狀和目標與測量頭的距離,顯示在TFT彩屏上。
3)隨機抽取籃球、排球、足球中的一個,目標擺在目標放置區的任意位置,按下測量鍵后,攝像頭裝置自動尋找目標,判斷球類品種、測量與球表面最近距離,顯示在TFT彩屏上。
4.2 測試結果
為了能夠準確清晰地觀察到數值,將所做的實驗數據匯總,如表所示。
1)按照測量方案1測量,測量結果見表1。
2)按照測量方案2測量,測量結果見表2。
3)按照測量方案3測量,測量結果見表3。
4.3 測試結果分析
從測試結果可以看出,本系統通過攝像頭采集物體的顏色、邊緣線、所占像素值、再結合測距模塊可實現對物體的尺寸形態測量。測距模塊在2~3m距離范圍內測量準確,攝像頭在2~3m距離范圍內像素捕捉較為精準,進而兩者結合計算出的物體尺寸與實際相差不大。本系統經過數次調試,具有高效率、工作可靠、測量誤差較低的優點。
4.4 結論
通過實驗表明,本系統可實現對小尺寸物體的測量,甚至是微小工件的測量,它不僅具有測量精度高、成本低廉、方便維護、操作簡單等優點,還能夠實現高效率、智能化、動態測量,同時滿足非接觸測量的需求。尤其適用于工作環境復雜、較危險的場合,具有較廣闊的應用前景。
