基于AI的貨車盲區自動監測報警系統*
2023-07-09 07:21:30高登王志仁王瑞呂秋萱張愛敏
汽車文摘 2023年7期
關鍵詞:信號
高登 王志仁 王瑞 呂秋萱 張愛敏
(成都工業學院,成都 611730)
0 引言
2021 年中國道路交通事故貨車死亡人數為1.66萬人,2021 年中國交通事故發生數量為24.8 萬起,由其造成的直接財產損失為13.46 億元,交通事故事件受傷人數遠遠大于死亡人數,而大型貨車出現交通事故相比于小汽車出現事故的概率最高、危險系數最大。而大型貨車因右轉盲區而導致事故發生概率幾乎為1[1]。
為防范大型貨車的右轉事故,本文提出基于人工智能(AI)的大型貨車右轉盲區警示系統,通過在車頭安裝高清攝像頭監測貨車在右轉或等待交通信號燈時,貨車右側盲區內的危險,通過AI 中控臺連接到屏幕反映出的視覺信息讓駕駛員做出正確的判斷和操作。在車輛的右側安裝毫米雷達,用于探測右側盲區,AI 系統自動通過計算、分析和處理來自傳感器接入端接收的數據,做出判斷并自動發出指令到輸出端。若AI 中控臺判斷出危險,將通過蜂鳴振動裝置與外置雙語音報警裝置發出聲音,通過預警使司機做好防范措施,同時提醒行人及其他大型貨車的動態,提醒其注意避讓,有效地規避事故的發生。
1 圖像裝置與控制系統
1.1 系統組成及原理分析
系統由一個高清攝像頭、蜂鳴裝置、外置語音播放器、一塊高清液晶屏幕、一塊內置AI中控板組成。
中控臺系統內置AI人工智能系統,可自動處理和識別信息,其效率更高效,可實時分析來自攝像頭拍攝和雷達探測的信息。中控臺自動計算出右側盲區內的安全性,并與理論設置安全范圍比照。可實時通過與中控臺連接的屏幕裝置,駕駛員可觀察到影像信息、探測信息和工作狀態信息。
1.2 攝像頭安裝位置
高清攝像頭安裝于車頭右前方,能夠覆蓋整個右轉盲區的全部區域。內置AI 中控板安裝于液晶屏幕背后,負責實時接收信號、處理并分析數據,經判斷輸出相應的命令信號。蜂鳴裝置安裝在駕駛艙,負責提醒駕駛員。外置語音播放器安裝在車頭右側,負責語音提示車外行人。高清液晶屏幕安裝在貨車的駕駛臺,保證駕駛員正常駕駛的情況下實時準確地觀察盲區里的動態,圖1為中控臺屏幕展示。
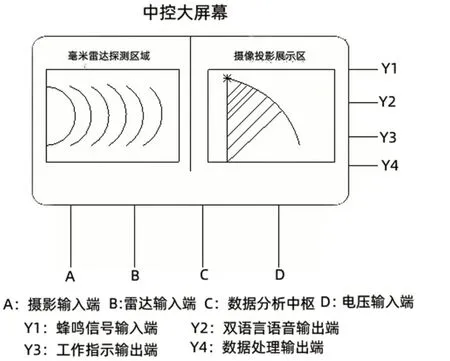
圖1 中控屏幕展示
1.3 工作原理分析
在大型貨車進行右轉時,攝像頭覆蓋整個右轉盲區范圍,并將畫面實時傳回中控臺,經攝像輸入端顯示在液晶屏幕上,同時也經雷達輸入端將盲區內雷達探測到的信號范圍描繪在屏幕上[2],其設計數據分析中樞與之連接的AI中樞板,對接收到的圖像和雷達信息進行計算分析[3],與預先設定的安全范圍進行比照,傳回的數據處理后傳到輸出端。
當出現安全范圍之外的情況并可能發生碰撞時,系統會命令連接蜂鳴信號輸出端并打開開關,安裝在駕駛室的蜂鳴裝置會發出蜂鳴聲,提醒駕駛員減速避讓和注意觀察屏幕的圖像信息。與蜂鳴裝置串聯的外置雙語語音輸出端也同時打開開關,通過中英文連續輸出方式提醒右轉盲區內其他車輛與行人將引發危險,勿再前行。當下一段信號傳遞到輸出端并輸出危險消失信號,輸出信號的開關將自動關閉,停止發出蜂鳴和雙語言語音報警。中控臺還通過電源電壓輸入端連接大型貨車電源箱,為裝置實時供電,供整個系統工作,駕駛員可以通過觀察工作指示輸出端連接的LED燈裝置,判斷整個系統是否處于正常工作狀態,以便于及時維修和保護。
2 雷達探測系統
貨車由于車體較大、駕駛室距離地面高的結構特點存在多處視野盲區,因此針對這一情況對大型貨車的視野盲區進行了分析,如圖2所示[4]。
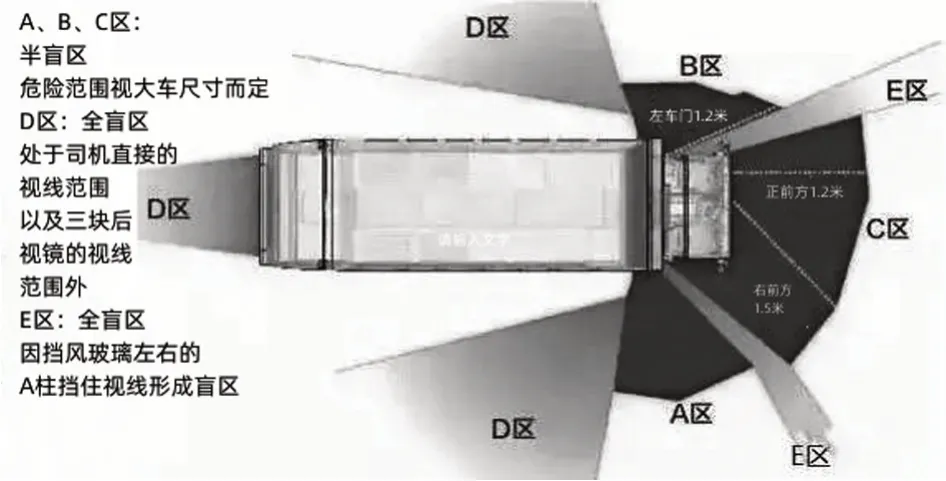
圖2 視野盲區展示[4]
大型貨車的主要盲區在于汽車的前側和兩側區域。雷達安裝位置是探測系統的重要部分操作比較精密[5],為了提高汽車安全性,根據汽車車身尺寸的測量數據,制定了一套毫米波雷達安裝計劃,安裝情況如圖3所示。
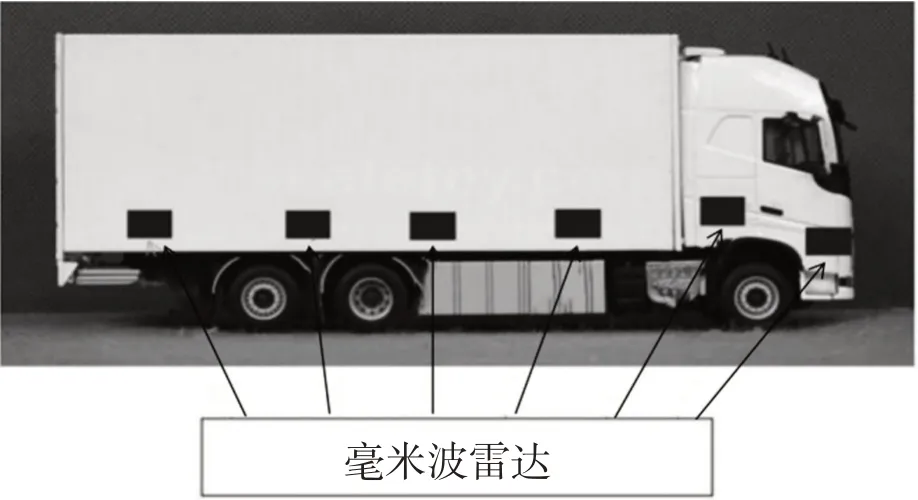
圖3 安裝位置示意[5]
2.1 測速原理
毫米波雷達具有以下2種測量速度方式:
(1)根據Doppler 原理:當盲區內物體與雷達信號發生源之間發生相對位移時,使發射信號與回波信號之間存在時間差,在頻率上產生多普勒位移設fd(圖4)。
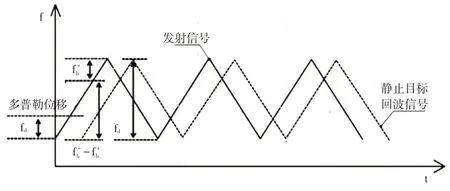
圖4 測速Doppler原理[6]
(2)可以跟蹤到測量目標的位置,通過微分方法測速[6]。但此種方式需要更先進算法,不利于低成本普及。
1.2 測距原理
毫米波雷達調頻器通過天線發射微波信號,發射信號遇到盲區內物體后經物體的反射會產生回波信號(發射信號與回波信號相比形狀相同、時間上存在差值),以雷達發射三角波信號為例,發射信號與回波信號對比,測距原理如圖5。
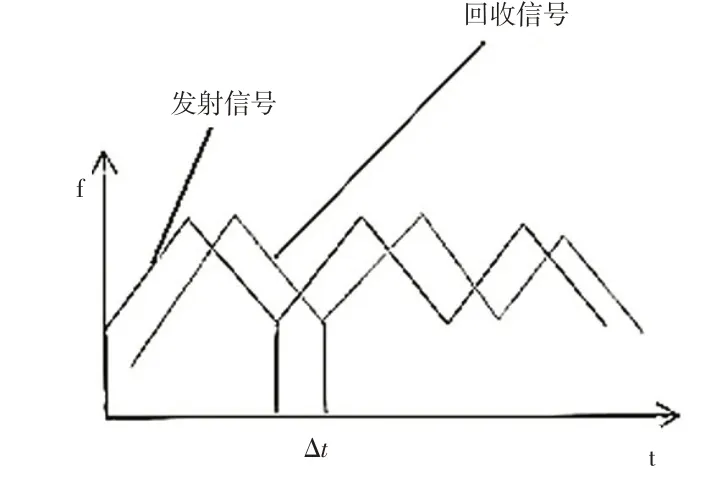
圖5 測距原理
毫米波雷達測距公式如式(2):
式中,t為雷達波飛行時間;c為光速;s為毫米波雷達與物體的距離。
2.3 判斷位置
通過毫米波雷達發射出毫米波后,遇到被盲區內物體反射回來,如圖6。
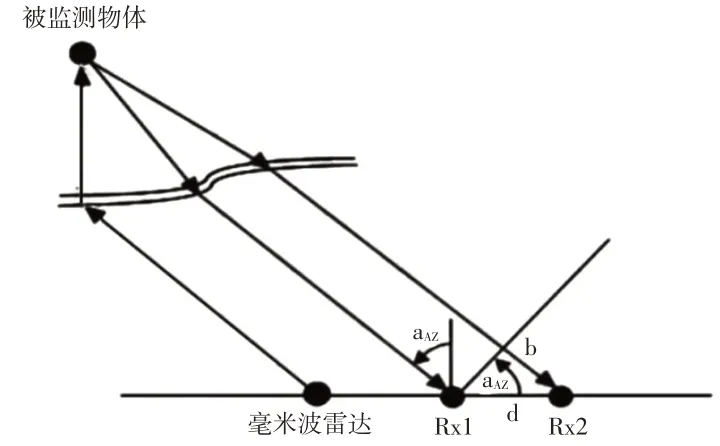
圖6 方位角原理
通過毫米波雷達并列的接收天線,收到同一物體反射回來毫米波的相位差,就可以計算出盲區某一物體的方位角(αaz),一個毫米波雷達上就有4條接收天線RX1~RX4。假設是測量毫米波雷達接收天線RX1,和接收天線RX2之間的幾何距離d,以及2根毫米波雷達天線所接收到反射回波的相位差b,然后通過三角函數計算得到方位角αaz的值,即
通過上述3 種原理,測出盲區內物體的速度、距離、位置,通過傳感器傳輸到駕駛室中控臺,再運用AI數據處理器對數據進行處理,AI最終向貨車司機發出避險警示。
與普通的雷達相比,毫米波雷達具有更好的角度分辨能力,對于測量目標的速度和距離也有更高的測量精度。毫米雷達的探測區域是如圖7 所示的扇形區域[7],它的主要構造包括控制和處理單元、信號傳遞中控臺、圖像裝置和預警提示裝置,探測區域如圖7 所示。
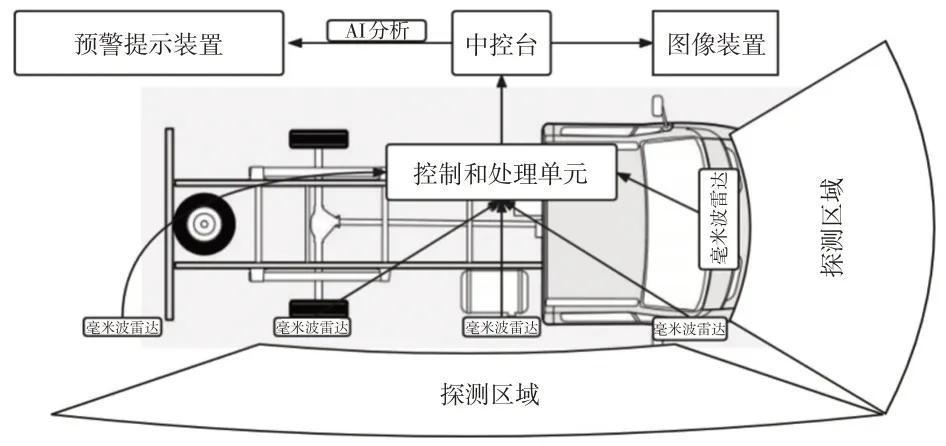
圖7 探測區域示意[7]
4 預警提示裝置
預警監測系統采用一體化創新設計,攝像頭上雷達通過中控臺智能動態檢測右轉盲區內的其他車輛和行人。
預警提示裝置同時對貨車駕駛員和盲區人物進行雙向預警。通過液晶屏背后AI 中控臺連接蜂鳴振動裝置和雙語音報警裝置實時自動輸出,預警監測區域如圖8所示。
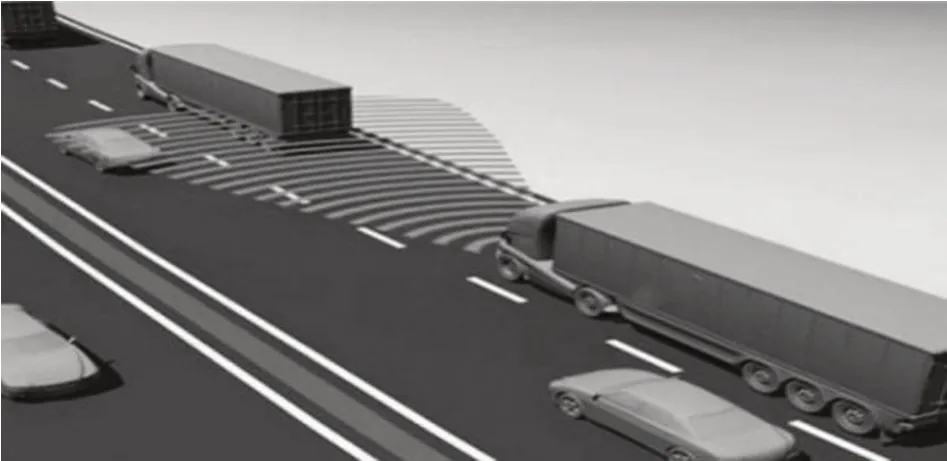
圖8 預警監測區域
預警提示裝置能通過AI自動控制并實時提醒,不但幫助大型貨車駕駛員在右轉時提前知悉右轉盲區內行人和其他車輛動態,而且提醒行人和其他車輛注意左后方駛來即將右轉的大型貨車動態,需注意觀察并小心通行。目前應用的預警提示裝置,主要是在車輛上安裝攝像頭來實現盲區監測,但在夜晚或者光線較差的環境下,在對向車輛發出來強光的照射下,攝像頭采集到的圖像模糊,對駕駛員的辨別會造成影響[8],或是基于原有攝像頭的基礎上,加之監測控制相連的蜂鳴報警器,但安裝在車內的裝置聲音僅能提醒駕駛員,駕駛員由于反應時間和大型貨車制動慣性很難第一時間降低車速,且由于車后的隔絕和貨車行駛的振動噪聲,行人和其它車輛根本沒有接收到預警信息,便無所畏懼地繼續前行,因此危險性依然存在[9],有必要提出有針對大型貨車盲區雙向預警方案。右轉盲區系統的工作原理如圖9所示。
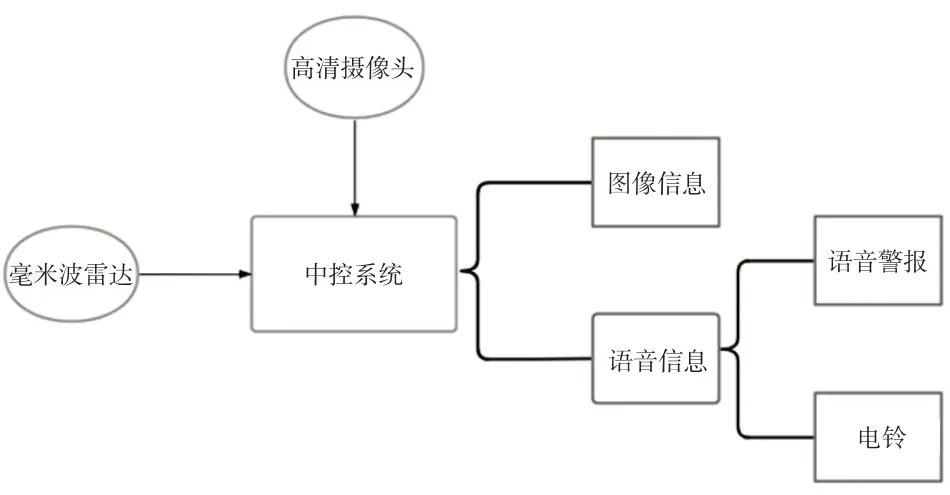
圖9 系統工作原理展示
盲區監測報警裝置的硬件設計主要包含4 個部分:電源部分、車外傳感器、報警器和AI中控臺[10]。電源部分連接整個裝置電壓,車外傳感器連接的攝像頭和雷達負責采集數據,同時把數據傳遞到中控臺,由中控臺進行處理數據并輸出指令到輸出端口,假若AI中控臺判斷當前數據將達到報警條件,則會發出指令使安裝在大型貨車內外的預警提示裝置同時發出蜂鳴振動和雙語音報警來雙向提示,同時車內中控臺也有相應的預警提醒信息出現在液晶屏幕上。當貨車行駛一段距離盲區內危險解除后,中控臺的下一個指令傳入預警裝置和屏幕,將自動關閉預警裝置和消除屏幕信息,即停止蜂鳴、語音輸出和屏幕提示,大型貨車又恢復到安全行駛狀態。
4 結束語
本文主要對中型或較大型貨車的盲區監測系統進行了主要分析和研究。首先引用現在較為先進成熟的毫米波雷達技術,有效地提升了貨車對于外界(特別是貨車右轉盲區處)對人員的探測能力,極大地改善了貨車關于盲區探測的弊端。其次,該系統采用AI中控板、高清液晶屏幕、以及雙語音報警等裝置,將現存的較為先進設備整合到一起,使整個裝置達到更穩定提高規避危險的目的。毫米波雷達實時發出探測信息,AI中控臺會接受此信息并進行有效地分析處理,中控臺輸出端口一鍵3連傳出處理指令,簡明扼要地顯示在高清液晶屏幕上,同時蜂鳴報警裝置和外置雙語音報警裝置會對貨車駕駛員和外圍的人員進行實時警示。
僅設置右轉肓區監測系統在有限范圍內極大地規避了貨車事故的發生,優化了成本,更具有應用前景。經過多次分析比照,滿足大批量貨車安裝需求,并應用于大型貨車。未來會加強這一系統的改善和升級,降低能耗和成本并提高規避風險能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06