基于PLC 的4 層電梯的控制系統(tǒng)仿真設計
2023-07-08 06:35:30張玉梅
科技與創(chuàng)新 2023年12期
張玉梅,王 瑞
(廣東職業(yè)技術學院,廣東 佛山 528041)
1 研究背景
隨著現(xiàn)代生活水平的日益提高,農村地區(qū)居住水平有很大的提高。許多農村地區(qū)興建了很多小洋樓。樓房大多數(shù)是只有步梯設計,而農村以老人兒童居多,因此農村自建房安裝電梯也是一個必然趨勢。電梯的控制設計有很多種方案,早期采用繼電器控制和單片機控制是使用比較多的方法。眾所周知,繼電器工作和單片機控制方式的可靠性低,故障率高,維護也極其不便[1]。因此,現(xiàn)在已經在逐步淘汰中。而且電梯作為自動化控制領域的一部分備受關注,其安全性、可靠性、經濟性是在設計電梯時追求的方向。而電梯采用PLC 控制的方案有比較大的優(yōu)勢:可靠性高,穩(wěn)定性強,另外針對不同的客戶需求,不需要改變硬件接線,只需改變PLC 的梯形圖程序就可以滿足。所以基于PLC 控制的電梯系統(tǒng)有很大的適用范圍。
2 系統(tǒng)設計
農村自建房以3 層或4 層居多,結合控制要求和使用場景,這里采用4 層的電梯控制系統(tǒng)。PLC 采用SIMATIC S7-200 SMART 可編程控制器。
西門子PLC 系列的S7-200 SMART 是西門子PLC S7-200 的加強版,與S7-200 相比,它在性能、硬件配置和軟件組態(tài)方面都有提高,也得到了用戶的廣泛認可。標準型的基本模塊I/O 點數(shù)最大可達60 點,I/O能力最大可擴展至256 點,可以不采用西門子公司的專用下載電纜,使用普通網線輕松實現(xiàn)程序的下載和調試,成本低廉,通信極其方便[2]。
系統(tǒng)的具體設計方案如下:設計4 層電梯控制系統(tǒng)共需要16 個輸入端口和23 個輸出端口,由于西門子SIMATIC S7-200 SMART可編程控制器有24個輸入端口和16 個輸出端口,標準型作為可擴展CPU 模塊,加一個擴展模塊,用于七段發(fā)光二極管的接線。可滿足I/O 規(guī)模有較大需求,邏輯控制較為復雜的應用。所以運用SIMATIC S7-200 SMART 型PLC,此PLC 能夠很好地滿足系統(tǒng)的設計要求。
2.1 電梯硬件設計方案
根據(jù)上述系統(tǒng)設計的原理要求,控制設計的主體部分,包含電梯轎廂的升降控制和呼叫系統(tǒng)的設計[3]、電梯平層和開關門控制設計以及樓層顯示、報警呼叫等。具體方案如下。
電梯進入剛開始運行狀態(tài)時,電梯轎廂會在第一層,這時電梯屬于準備運行狀態(tài),接收任何樓層的按鈕呼叫。
總電梯層數(shù)為4 層,每層標號為相應的數(shù)字1~4,轎廂內有一個帶顯示屏的控制指示盒,顯示屏顯示樓層的數(shù)字,控制盒內有4 個樓層的呼叫按鈕。在電梯井里每一層都配有一個行程開關。當轎廂在上升或下降的過程中碰到行程開關時,會給PLC 輸入相應的樓層信號。另外,在每個樓層的電梯門外,會有相應的樓層顯示,同時也要配置上行或下行的呼叫按鈕,最底層只需有上行按鈕,頂層只需有下行按鈕。
外呼:電梯外隨機呼叫電梯,電梯按先到先得、順序同向優(yōu)先響應的規(guī)則上升或下降,到達指定樓層,自動開門,暫停5 s,然后自動關門,如遇強制開門,再順延5 s 自動關門。如果乘客進入廂內沒有任何操作,在電梯門關好后,控制系統(tǒng)會響應樓層的外呼信號。
內呼:乘客在轎廂內,可以按目標樓層按鈕,電梯根據(jù)方向判斷進行升降。當按下內層呼叫按鈕時,被按樓層的燈會亮,電梯控制系統(tǒng)會比較呼叫樓層和所停樓層,判斷是輸出上升或下降的信號,轎廂到達相應樓層后,這個樓層的燈才會滅。為安全起見,若電梯門沒有關上,曳引電機不能運行。即使在轎廂運行過程中,電梯門沒關上,任何時候曳引電機要即刻停止運行。
轎廂內的控制盒內一定要配置一個緊急呼叫按鈕,在電梯運行不正常時,乘客隨時可以按下緊急按鈕求救。增加一個報警鈴,以便周圍的人員及時施救。
2.2 I/O 分配設計
輸入信號包含內呼按鈕、外呼按鈕和行程開關等。輸出信號包含電梯上升下降、電梯門的開關外,還有電梯內外的指示燈及報警鈴等。具體的I/O 分配如表1所示。
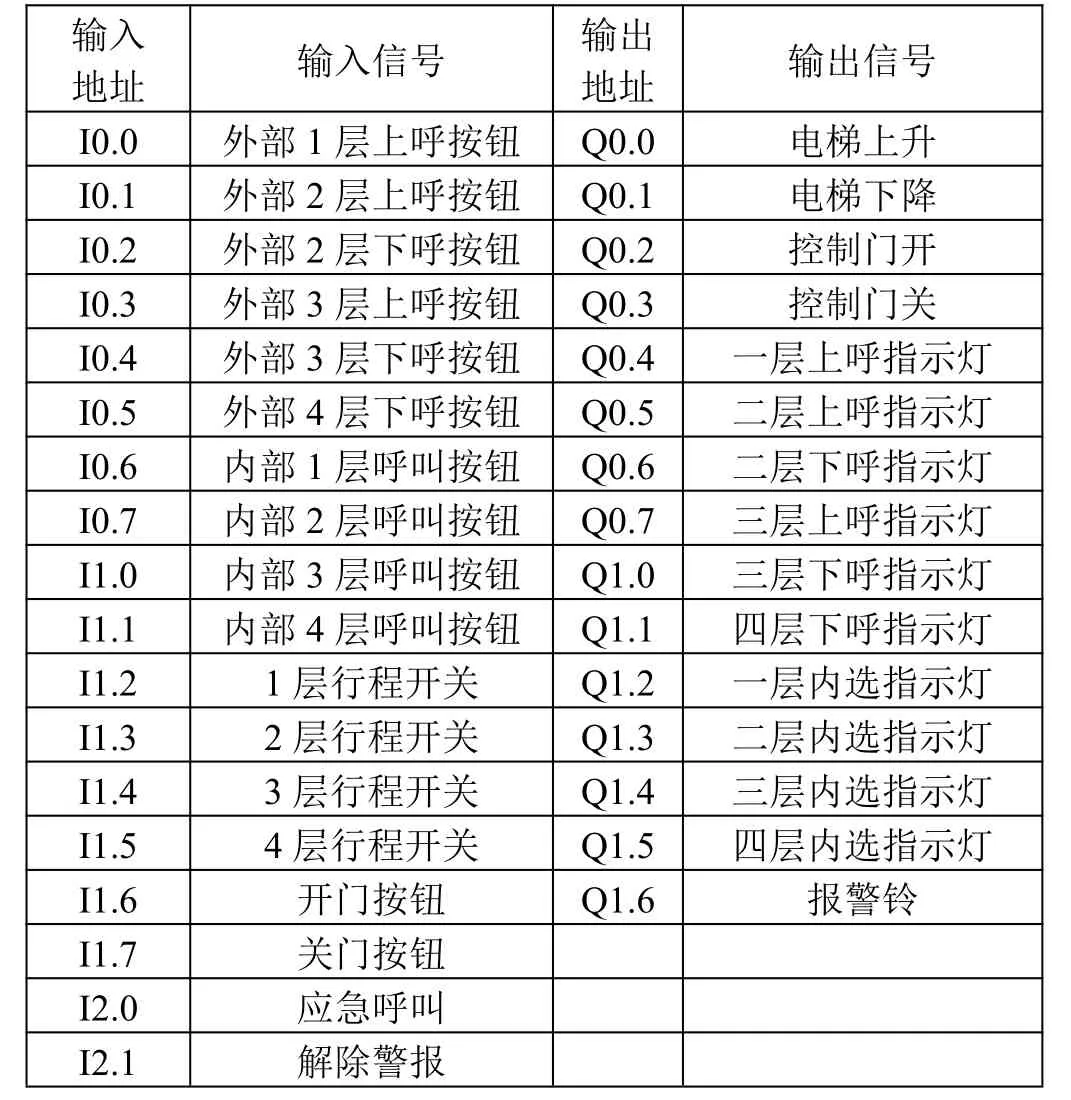
表1 I/O 分配及說明表
3 軟件設計
3.1 電梯運行的程序設計
電梯要實現(xiàn)電梯的上下行功能以及到達平層后進行開關門控制。控制系統(tǒng)一上電后,轎廂會停止在一樓,屬于準備運行狀態(tài)。如果有門廳外呼叫信號,PLC控制系統(tǒng)會將目標樓層和所停樓層進行比較,然后再控制轎廂上行或者下行。轎廂到了目標樓層后,確保完成平層后打開電梯門,延時5 s 后再關閉電梯門。完成這次任務后,轎廂會停止在此樓層,等待下一次呼叫信號,然后再進行相應響應,周而復始。電梯的程序控制流程如圖1 所示。

圖1 電梯控制流程圖
3.2 電梯PLC 軟件編程
PLC 程序的編程用STEP 7-Micro/WIN SMART 編程軟件,它是西門子公司為S7-200 SMART 開發(fā)的編程軟件,編程特別方便,可以在Windows XP SP3/Windows10 中運行。編程的時候主要分2 個模塊進行。
3.2.1 上行下行程序
電梯的主要功能是曳引電機牽引轎廂上升或下降,實際上是曳引電機的正反轉。PLC 根據(jù)樓層信號和內外呼叫信號進行比較,來控制轎廂的上升或下降[4]。
優(yōu)先響應內選信號,如果是外選順向呼叫,則是無條件地響應,反向呼叫則要按遠程反向原則處理。
在這里采用比較指令將呼叫層樓層信號和轎廂所在層信號進行比較,從而確定是上升還是下降,即曳引電機是正轉還是反轉。每個樓層所在信號由行程開關控制,由行程開關將樓層信號傳送到相應的數(shù)據(jù)寄存器里。電梯上行的程序如圖2 所示。
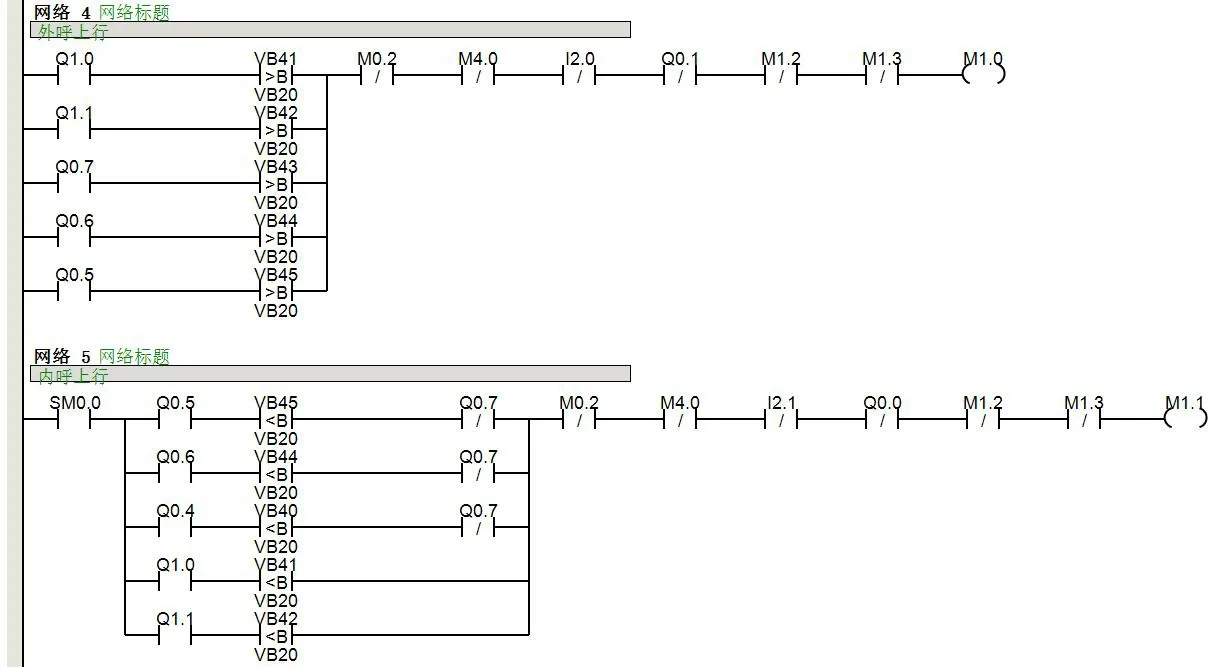
圖2 電梯上行梯形圖
3.2.2 開關門程序
電梯的開關門程序如圖3 所示,電梯運行到相應的目標樓層后,會自動將電梯門打開。若有需要或有異常,也可手動按開門按鈕將電梯門再打開。電梯門延遲時間設置為5 s,這樣開門狀態(tài)延時5 s 后,會自動關門,反之亦然。
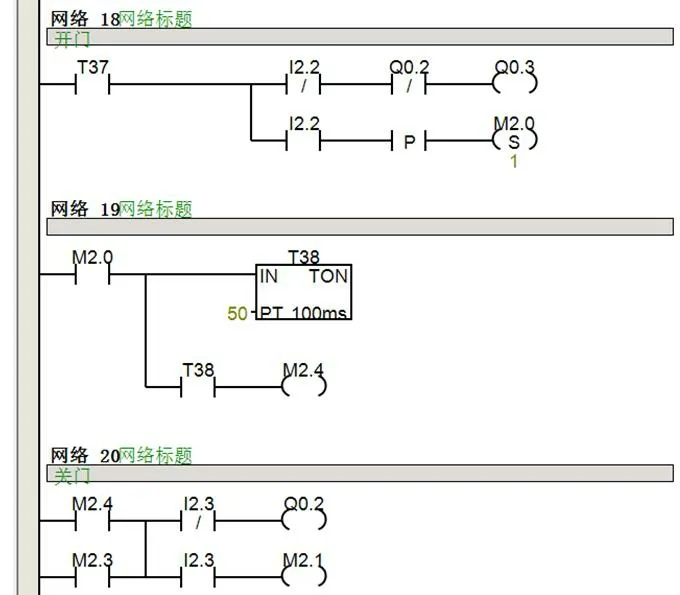
圖3 電梯開關門部分梯形圖
在這延遲時間內,如果不想等待。也可以手動操作,提前關閉電梯門。
4 仿真調試
設計好電路后,充分利用宇龍仿真軟件進行仿真設計和編程。先選擇相應的元器件,接好主電路和PLC接口電路后,進行編程調試。整個監(jiān)控界面設計和實際的比較接近。仿真系統(tǒng)的監(jiān)控界面有電梯轎廂、內外呼叫按鈕,電梯上行顯示、下行顯示及樓層顯示,另外還有開關門按鈕等。利用仿真軟件時,要將所有的輸入輸出信號和三維仿真系統(tǒng)里面的信號對應好,并進行一一綁定,才能達到直觀運行的效果。初始界面的仿真如圖4 所示。
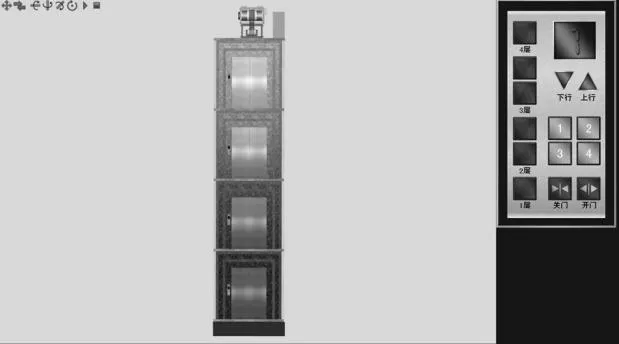
圖4 初始界面的仿真圖
根據(jù)前面設計的工作原理,通過仿真可以檢查內外呼叫功能是否正常、能不能順利開關門等。通過模仿運行狀態(tài),按下電梯的每一個按鈕來觀察電梯的上下行情況和開關門情況。
電梯呼叫系統(tǒng)中的外呼系統(tǒng)和內呼系統(tǒng)可在控制箱內完成操作。通過仿真,可將全部的情況調試一遍[5]。當電梯處于某個樓層時,首先第一步,調試能否實現(xiàn)另外樓層的外呼功能,到目標樓層后,門全部開啟,延時5 s 后會自動關門。然后第二步,調試內呼功能。第三步,調試內呼和外呼都有的情況,要滿足同向優(yōu)先響應的原則,反向則暫不響應。電梯轎廂內有顯示屏會實時顯示電梯處于哪一層,便于乘客了解。開門狀態(tài)的仿真如圖5 所示。

圖5 開門狀態(tài)的仿真圖
5 結束語
設計的這個4 層電梯的PLC 控制系統(tǒng)能夠實現(xiàn)電梯運行的多項基本功能,包括樓層顯示、內外呼叫系統(tǒng)、電梯的上下行功能降控制、自動開關電梯門等。使用STEP-7 軟件對電梯軟件系統(tǒng)進行編程,完整地實現(xiàn)了電梯的各項控制功能。并用宇龍仿真軟件進行三維仿真,可以清晰地看到電梯控制系統(tǒng)界面,并按照實際情況進行模擬操作,完全能達到電梯正常運行的要求。因此,本電梯控制系統(tǒng)可以在4 層樓房中實際運行。
猜你喜歡
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2025年8期)2025-08-23 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
電子制作(2018年12期)2018-08-01 00:47:44
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
當代化工研究(2016年6期)2016-03-20 16:21:46
小說月刊(2015年4期)2015-04-18 13:55:18
商業(yè)評論(2014年9期)2015-02-28 04:32:41