異構(gòu)智能車(chē)隊(duì)安全行駛控制研究
2023-06-25 02:22:55席寬樊展鵬曹子軒劉雙萍陳磊
專用汽車(chē) 2023年6期
席寬 樊展鵬 曹子軒 劉雙萍 陳磊
摘要:異構(gòu)智能車(chē)隊(duì)是提高高速公路通行能力,以及降低能源消耗的有效途徑,但是車(chē)隊(duì)行駛過(guò)程中的碰撞風(fēng)險(xiǎn)是其面臨的挑戰(zhàn)。對(duì)異構(gòu)智能車(chē)隊(duì)主動(dòng)安全控制方法進(jìn)行研究,首先對(duì)車(chē)隊(duì)碰撞風(fēng)險(xiǎn)進(jìn)行分類(lèi),指出了影響異構(gòu)智能車(chē)隊(duì)安全行駛的因素主要有通信延誤、通信距離、制動(dòng)性能;然后構(gòu)建了異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航控制模型,采用滑模控制技術(shù)進(jìn)行控制,仿真結(jié)果表明,滑模控制在確保滿足車(chē)隊(duì)穩(wěn)定性的基礎(chǔ)上具有良好控制效果;最后構(gòu)建了異構(gòu)智能車(chē)隊(duì)隊(duì)內(nèi)車(chē)輛緊急換道避撞行為決策模型,并通過(guò)仿真試驗(yàn)驗(yàn)證了換道決策的有效性。研究結(jié)論對(duì)異構(gòu)智能車(chē)隊(duì)的主動(dòng)安全控制以及提高車(chē)隊(duì)的安全性,具有一定的參考價(jià)值。
關(guān)鍵詞:異構(gòu)智能車(chē)隊(duì);自適應(yīng)巡航控制;緊急換道決策;滑模控制
中圖分類(lèi)號(hào):U495? 收稿日期:2023-03-30
DOI:10.19999/j.cnki.1004-0226.2023.06.009
1 前言
國(guó)民經(jīng)濟(jì)的快速發(fā)展促進(jìn)了公路交通的發(fā)展,同時(shí)汽車(chē)保有量也大幅度增加。高速公路在為經(jīng)濟(jì)快速發(fā)展提供保障的同時(shí)也為國(guó)民的出行帶來(lái)了極大的便利,交通安全成了備受關(guān)注的話題。根據(jù)《全球道路安全現(xiàn)狀報(bào)告》,全球每年有約200多萬(wàn)人死于交通事故,由車(chē)輛駕駛所造成的交通安全事故高達(dá)1/3。智能交通為有效解決交通出行效率和交通安全之間存在的矛盾提供了可能,基于V2X的交通環(huán)境信息感知交互技術(shù)能夠?qū)?chē)輛行駛過(guò)程中存在的潛在交通安全風(fēng)險(xiǎn)發(fā)出預(yù)警,從而大大降低交通安全事故的發(fā)生。智能車(chē)輛編組行駛是提高道路交通效率的有效手段,其通過(guò)先進(jìn)的控制技術(shù)、V2V通信技術(shù)對(duì)同向行駛的車(chē)輛統(tǒng)一組織,結(jié)合車(chē)隊(duì)前車(chē)的運(yùn)動(dòng)狀態(tài)來(lái)進(jìn)行跟蹤調(diào)整[1]。
智能車(chē)隊(duì)主要有同構(gòu)智能車(chē)隊(duì)和異構(gòu)智能車(chē)隊(duì)兩種類(lèi)型,其中同構(gòu)智能車(chē)隊(duì)中所有車(chē)輛類(lèi)型相同、性能參數(shù)相同,主動(dòng)安全控制相對(duì)比較容易,同時(shí)學(xué)術(shù)界的研究比較多,控制技術(shù)相對(duì)成熟[2];異構(gòu)智能車(chē)隊(duì)中車(chē)輛的類(lèi)型不同、性能參數(shù)也不相同,和同構(gòu)智能車(chē)隊(duì)相比,異構(gòu)智能車(chē)隊(duì)的主動(dòng)安全控制更為復(fù)雜。
伴隨著車(chē)輛類(lèi)型的多元化發(fā)展,異構(gòu)智能車(chē)隊(duì)在實(shí)際中的應(yīng)用更為廣泛,對(duì)異構(gòu)智能車(chē)隊(duì)的主動(dòng)安全控制迫在眉睫。基于此,本文對(duì)異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航控制和車(chē)隊(duì)內(nèi)車(chē)輛緊急換道避障決策控制進(jìn)行研究,期待對(duì)促進(jìn)異構(gòu)車(chē)隊(duì)的安全、穩(wěn)定行駛具有一定的參考。
2 異構(gòu)智能車(chē)隊(duì)碰撞風(fēng)險(xiǎn)
2.1 車(chē)隊(duì)碰撞風(fēng)險(xiǎn)分類(lèi)
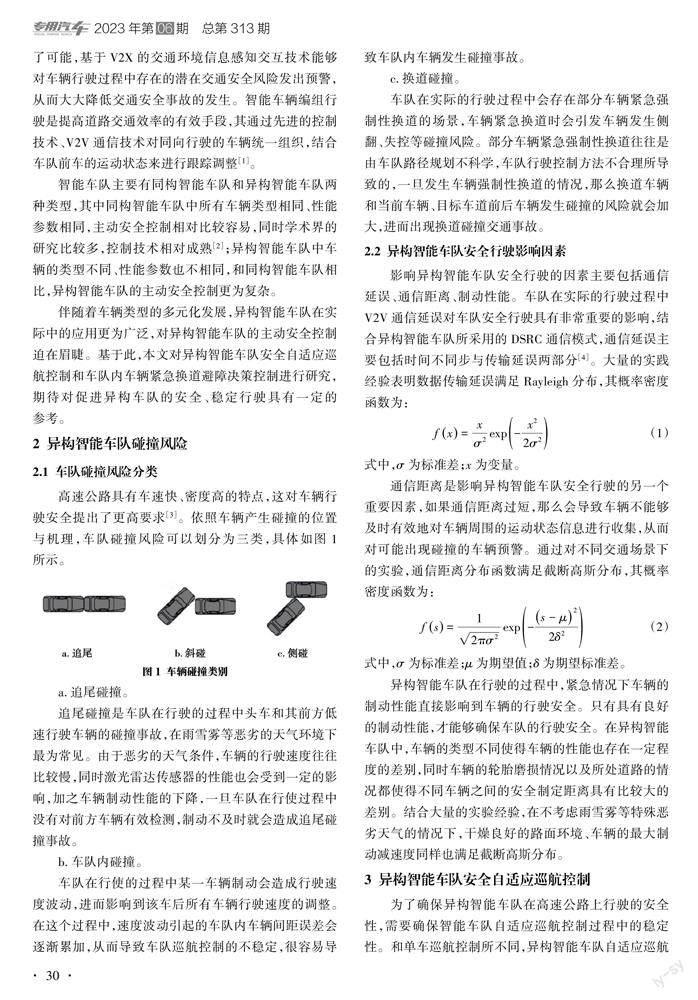
高速公路具有車(chē)速快、密度高的特點(diǎn),這對(duì)車(chē)輛行駛安全提出了更高要求[3]。依照車(chē)輛產(chǎn)生碰撞的位置與機(jī)理,車(chē)隊(duì)碰撞風(fēng)險(xiǎn)可以劃分為三類(lèi),具體如圖1所示。
a.追尾碰撞。
追尾碰撞是車(chē)隊(duì)在行駛的過(guò)程中頭車(chē)和其前方低速行駛車(chē)輛的碰撞事故,在雨雪霧等惡劣的天氣環(huán)境下最為常見(jiàn)。由于惡劣的天氣條件,車(chē)輛的行駛速度往往比較慢,同時(shí)激光雷達(dá)傳感器的性能也會(huì)受到一定的影響,加之車(chē)輛制動(dòng)性能的下降,一旦車(chē)隊(duì)在行使過(guò)程中沒(méi)有對(duì)前方車(chē)輛有效檢測(cè),制動(dòng)不及時(shí)就會(huì)造成追尾碰撞事故。
b.車(chē)隊(duì)內(nèi)碰撞。
車(chē)隊(duì)在行使的過(guò)程中某一車(chē)輛制動(dòng)會(huì)造成行駛速度波動(dòng),進(jìn)而影響到該車(chē)后所有車(chē)輛行駛速度的調(diào)整。在這個(gè)過(guò)程中,速度波動(dòng)引起的車(chē)隊(duì)內(nèi)車(chē)輛間距誤差會(huì)逐漸累加,從而導(dǎo)致車(chē)隊(duì)巡航控制的不穩(wěn)定,很容易導(dǎo)致車(chē)隊(duì)內(nèi)車(chē)輛發(fā)生碰撞事故。
c.換道碰撞。
車(chē)隊(duì)在實(shí)際的行駛過(guò)程中會(huì)存在部分車(chē)輛緊急強(qiáng)制性換道的場(chǎng)景,車(chē)輛緊急換道時(shí)會(huì)引發(fā)車(chē)輛發(fā)生側(cè)翻、失控等碰撞風(fēng)險(xiǎn)。部分車(chē)輛緊急強(qiáng)制性換道往往是由車(chē)隊(duì)路徑規(guī)劃不科學(xué),車(chē)隊(duì)行駛控制方法不合理所導(dǎo)致的,一旦發(fā)生車(chē)輛強(qiáng)制性換道的情況,那么換道車(chē)輛和當(dāng)前車(chē)輛、目標(biāo)車(chē)道前后車(chē)輛發(fā)生碰撞的風(fēng)險(xiǎn)就會(huì)加大,進(jìn)而出現(xiàn)換道碰撞交通事故。
2.2 異構(gòu)智能車(chē)隊(duì)安全行駛影響因素
異構(gòu)智能車(chē)隊(duì)在行駛的過(guò)程中,緊急情況下車(chē)輛的制動(dòng)性能直接影響到車(chē)輛的行駛安全。只有具有良好的制動(dòng)性能,才能夠確保車(chē)隊(duì)的行駛安全。在異構(gòu)智能車(chē)隊(duì)中,車(chē)輛的類(lèi)型不同使得車(chē)輛的性能也存在一定程度的差別,同時(shí)車(chē)輛的輪胎磨損情況以及所處道路的情況都使得不同車(chē)輛之間的安全制定距離具有比較大的差別。結(jié)合大量的實(shí)驗(yàn)經(jīng)驗(yàn),在不考慮雨雪霧等特殊惡劣天氣的情況下,干燥良好的路面環(huán)境、車(chē)輛的最大制動(dòng)減速度同樣也滿足截?cái)喔咚狗植肌?/p>
3 異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航控制
為了確保異構(gòu)智能車(chē)隊(duì)在高速公路上行駛的安全性,需要確保智能車(chē)隊(duì)自適應(yīng)巡航控制過(guò)程中的穩(wěn)定性。和單車(chē)巡航控制所不同,異構(gòu)智能車(chē)隊(duì)自適應(yīng)巡航不僅僅要確保車(chē)輛自身的行駛穩(wěn)定性,同時(shí)還要確保整個(gè)車(chē)隊(duì)的行駛穩(wěn)定性[5]。
3.1 異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航控制模型
考慮到異構(gòu)車(chē)隊(duì)系統(tǒng)的不確定性,采用滑模控制方法進(jìn)行控制。滑模控制為特殊的非線性控制,其能夠在動(dòng)態(tài)過(guò)程中根據(jù)不固定系統(tǒng)當(dāng)前狀態(tài)來(lái)進(jìn)行有目的地變化,從而使得系統(tǒng)按照預(yù)定的滑動(dòng)模態(tài)進(jìn)行運(yùn)動(dòng)。和其他的控制方法所不同,滑模控制具有快速響應(yīng)、對(duì)應(yīng)參數(shù)變化與擾動(dòng)不靈敏、無(wú)需系統(tǒng)標(biāo)識(shí)、物理實(shí)現(xiàn)簡(jiǎn)單等優(yōu)點(diǎn)。
滑模控制的原理是根據(jù)系統(tǒng)的期望動(dòng)態(tài)特性設(shè)計(jì)系統(tǒng)的切換超平面。滑模控制器用于控制從超平面到切換超平面的系統(tǒng)狀態(tài)。一旦系統(tǒng)到達(dá)切換超平面,控制函數(shù)將確保系統(tǒng)沿著切換超平面到達(dá)系統(tǒng)原點(diǎn)。這種沿著切換超平面滑動(dòng)到原點(diǎn)的過(guò)程稱為滑動(dòng)模式控制。由于系統(tǒng)的特性和參數(shù)僅取決于設(shè)計(jì)的切換超平面,與外界干擾無(wú)關(guān),滑模變結(jié)構(gòu)控制具有很強(qiáng)的魯棒性。
超平面的設(shè)計(jì)方法包括極點(diǎn)配置、特征向量分配、優(yōu)化設(shè)計(jì)等,所設(shè)計(jì)的切換超平面必須滿足達(dá)到的條件,即系統(tǒng)將保持在滑模平面之后的平面內(nèi)。控制器設(shè)計(jì)包括固定序列控制器設(shè)計(jì)、自由序列控制器設(shè)計(jì)和最終滑動(dòng)控制器設(shè)計(jì)。滑模控制設(shè)計(jì)主要包括兩步:第一步是設(shè)計(jì)滑模面,要確保不穩(wěn)定系統(tǒng)存在滑模面;第二步是選擇合適的趨近規(guī)律,能夠確保不穩(wěn)定的系統(tǒng)在所設(shè)計(jì)的滑模面上進(jìn)行滑模運(yùn)動(dòng)。在考慮時(shí)間延遲的情況,控制器穩(wěn)定參數(shù)滿足如下公式:
3.2 異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航控制仿真
4 隊(duì)內(nèi)車(chē)輛緊急換道避撞行為決策控制
為了確保異構(gòu)智能車(chē)隊(duì)行駛的安全性,車(chē)隊(duì)在行駛過(guò)程中遇到緊急情況是否發(fā)生車(chē)隊(duì)內(nèi)車(chē)輛的追尾碰撞依賴于車(chē)輛的制動(dòng)性能。在智能車(chē)隊(duì)內(nèi),車(chē)輛的換道屬于強(qiáng)制性換道。受限于車(chē)隊(duì)內(nèi)車(chē)輛之間的距離短以及車(chē)輛運(yùn)動(dòng)狀態(tài)調(diào)整的復(fù)雜性,必須做好行為決策控制,才能夠避免發(fā)生安全事故。
4.1 隊(duì)內(nèi)車(chē)輛緊急換道避障決策
根據(jù)車(chē)隊(duì)車(chē)輛間設(shè)定的安全距離,在正常情況下是不會(huì)發(fā)生隊(duì)內(nèi)車(chē)輛碰撞事故的,但是由于異構(gòu)智能車(chē)隊(duì)內(nèi)不同車(chē)輛之間的制動(dòng)性能往往具有比較大的差異,這使得在實(shí)際的行車(chē)過(guò)程中難免會(huì)出現(xiàn)緊急情況。在緊急情況下,車(chē)隊(duì)中的部分車(chē)輛就需要緊急換道以此來(lái)避免發(fā)生碰撞[6]。構(gòu)建車(chē)輛緊急換道的周?chē)h(huán)境,在此基礎(chǔ)上分析車(chē)輛換道的最佳時(shí)機(jī)。
為了避免碰撞就必須確保兩車(chē)之間的安全距離,定義為確保換道不發(fā)生碰撞和周?chē)?chē)輛需要保持的最小距離為安全間距。緊急換道車(chē)輛E在緊急換道時(shí),為了不和車(chē)隊(duì)內(nèi)前車(chē)L1發(fā)生碰撞,擁有更長(zhǎng)的換道時(shí)間,在換道的決策階段應(yīng)該以最大的制動(dòng)減速度來(lái)進(jìn)行制動(dòng)。基于此,在換道的決策階段必須確保緊急換道車(chē)輛和周?chē)能?chē)輛保持安全距離,如果不滿足安全距離,那么就不能夠?qū)嵤┚o急換道。在換道的決策階段通過(guò)車(chē)輛減速制動(dòng),快速對(duì)最佳的換道時(shí)間做出判斷。車(chē)輛緊急換道決策步驟如下:
a.在確保緊急換道車(chē)輛側(cè)翻安全性和車(chē)輛穩(wěn)定性的前提下確定最短的換道時(shí)間,這是因?yàn)檐?chē)輛在高速公路上行駛的過(guò)程中速度非常快,快速的換道很容易導(dǎo)致車(chē)輛發(fā)生側(cè)翻,盡管沒(méi)有出現(xiàn)車(chē)輛碰撞事故,但是卻出現(xiàn)了側(cè)翻事故,這是絕對(duì)不允許的。
b.根據(jù)車(chē)輛安全距離模型來(lái)判斷是否需要換道避撞;如果不需要換道避撞,那么車(chē)輛減速緊急制動(dòng)就可以,這樣就能夠避免車(chē)輛和車(chē)隊(duì)內(nèi)的前車(chē)之間發(fā)生追尾事故,這是因?yàn)樵诟咚傩旭偟倪^(guò)程中緊急換道是非常危險(xiǎn)的行為,應(yīng)該盡量避免;如果確定需要換道避撞,那么就做出換道避撞的決策。
c.在做出換道避撞的決策之后選擇最佳的換道時(shí)間,在最佳的換道時(shí)間進(jìn)行車(chē)輛換道操作,然后對(duì)車(chē)速進(jìn)行調(diào)整,避免換道車(chē)輛和新車(chē)道車(chē)輛之間發(fā)生碰撞事故。
緊急換道車(chē)E在換道的過(guò)程中勻速運(yùn)動(dòng),旁車(chē)道后車(chē)L2在換道車(chē)輛E換道的過(guò)程中速度不發(fā)生改變,在換道之后根據(jù)運(yùn)行狀態(tài)來(lái)做出調(diào)整對(duì)旁車(chē)道前車(chē)L2來(lái)講,在換道車(chē)輛E換道的過(guò)程中速度不發(fā)生改變,換道車(chē)輛E在換道完成之后結(jié)合自身和旁車(chē)道前車(chē)L2的運(yùn)動(dòng)狀態(tài)來(lái)做出調(diào)整。對(duì)車(chē)隊(duì)內(nèi)前車(chē)L1來(lái)講,在緊急換道車(chē)輛E換道的過(guò)程中做勻減速運(yùn)動(dòng)。
4.2 隊(duì)內(nèi)車(chē)輛緊急換道避障決策仿真
設(shè)定異構(gòu)智能車(chē)隊(duì)的正常行駛速度為30 m/s,道路寬度為4 m,換道過(guò)程中前車(chē)的制動(dòng)加速度為8 m/s2,后車(chē)的制動(dòng)加速度為5 m/s2。仿真結(jié)果表明緊急換道車(chē)輛E和車(chē)隊(duì)內(nèi)前車(chē)L1的安全距離先增大后減少。通過(guò)調(diào)整換道車(chē)輛E的速度進(jìn)行再次仿真可知,當(dāng)換道車(chē)輛E的初始速度大于旁車(chē)道前車(chē)L2和旁車(chē)道后車(chē)R2的速度時(shí),旁車(chē)道后車(chē)R2對(duì)緊急換道車(chē)選擇換道時(shí)刻的選擇幾乎無(wú)影響,主要影響換道時(shí)間選擇的因素是緊急換道車(chē)E和旁車(chē)道前車(chē)L2以及車(chē)隊(duì)內(nèi)前車(chē)L1的安全距離。
5 結(jié)語(yǔ)
異構(gòu)智能車(chē)隊(duì)在提高道路交通效率,確保行駛安全方面發(fā)揮著至關(guān)重要的作用,在實(shí)際中得到了廣泛的應(yīng)用。異構(gòu)智能車(chē)隊(duì)碰撞主要有追尾碰撞、斜向碰撞、側(cè)向碰撞三種類(lèi)型,影響車(chē)隊(duì)安全行駛的因素有通信延誤、通信距離、車(chē)輛制動(dòng)性能。采用滑模控制技術(shù)對(duì)異構(gòu)智能車(chē)隊(duì)安全自適應(yīng)巡航進(jìn)行控制,其使得車(chē)隊(duì)自適應(yīng)巡航跟蹤誤差超調(diào)量小,在滿足車(chē)隊(duì)穩(wěn)定性的基礎(chǔ)上控制效果良好。通過(guò)構(gòu)建緊急換道周?chē)h(huán)境,提出了車(chē)輛緊急換道決策方法,并通過(guò)仿真指出緊急換道車(chē)輛初始車(chē)速對(duì)換道時(shí)刻選擇的影響。本文的研究對(duì)異構(gòu)智能車(chē)隊(duì)主動(dòng)安全控制,確保車(chē)隊(duì)的安全、穩(wěn)定行駛具有一定的參考價(jià)值。
參考文獻(xiàn):
[1]雷利利,張通基于模糊MPC的智能車(chē)隊(duì)縱向跟隨控制[J]江蘇大學(xué)學(xué)報(bào)(自然科學(xué)版),2022,43(4):394-399+430
[2]覃頻頻,張順?shù)h,吳鋒民,等基于改進(jìn)智能駕駛員模型的車(chē)隊(duì)縱橫向協(xié)同控制[J]公路交通科技,2022,39(9):155-161+176
[3]常鑫,李海艦,榮建,等混有智能網(wǎng)聯(lián)車(chē)隊(duì)的交通流基本圖模型分析[J]東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,50(4):782-788
[4]朱畏畏,江浩斌,馬世典,等基于魚(yú)群逃逸仿生學(xué)的智能車(chē)隊(duì)安全行駛模型研究[J]機(jī)械制造與自動(dòng)化,2018,47(5):190-193+205
[5]覃頻頻,裴世康,侯曉磊,等不同車(chē)輛工況對(duì)協(xié)同自適應(yīng)巡航控制車(chē)隊(duì)行駛安全的影響[J]交通運(yùn)輸系統(tǒng)工程與信息,2019,19(4):33-42
[6]張家旭,楊雄,施正堂,等汽車(chē)緊急換道避障的路徑規(guī)劃與跟蹤控制[J]華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,48(9):86-93+106
作者簡(jiǎn)介:
席寬,男,2001年生,本科在讀,研究方向?yàn)橹悄苘?chē)隊(duì)。
