自適應模糊PID對溶解氧的智能控制
2023-06-21 21:55:58張陳李明河沈鵬
現(xiàn)代信息科技 2023年1期
張陳 李明河 沈鵬
摘? 要:針對污水處理的非線性、滯后性和不確定性,提出將智能控制中的模糊控制和傳統(tǒng)的PID控制相結(jié)合,使得控制器同時具有模糊控制的強魯棒性和普通PID的優(yōu)穩(wěn)定性。通過MATLAB模擬表明,相較于傳統(tǒng)PID控制器而言,模糊PID溶解氧控制系統(tǒng)在污水處理過程中具有響應速度快、震蕩較小、穩(wěn)定性好等優(yōu)點。
關(guān)鍵詞:污水處理;模糊控制;溶解氧;模糊PID
中圖分類號:TP39;X70 文獻標識碼:A? 文章編號:2096-4706(2023)01-0107-04
Intelligent Control of Adaptive Fuzzy PID on Dissolved Oxygen
ZHANG Chen, LI Minghe, SHEN Peng
(School of Electrical and Information Engineering, Anhui University of Technology, Maanshan? 243002, China)
Abstract: Aiming at the fact that sewage treatment is nonlinear, large lag and uncertainty, it is proposed to combine fuzzy control in intelligent control with traditional PID control, so that the controller has both strong robustness of fuzzy control and excellent stability of ordinary PID. MATLAB simulation shows that compared with the traditional PID controller, during the sewage treatment process, the fuzzy PID dissolved oxygen control system has the advantages of fast response, small shock and good stability.
Keywords: sewage treatment; fuzzy control; dissolved oxygen; fuzzy PID
0? 引? 言
隨著人類社會不斷地進步發(fā)展,科技不斷地創(chuàng)新,人們正快速地進入現(xiàn)代化。現(xiàn)代化的標志大城市集群化以及輕重工業(yè)集中化也隨著現(xiàn)代化的發(fā)展迅猛發(fā)展,隨之而來的是水資源的質(zhì)量和人均持水量都在逐步降低[1]。改革開放以來,在近三十年的時間里我國由于重視經(jīng)濟建設,忽視了經(jīng)濟發(fā)展和環(huán)境保護之間的平衡,導致了嚴重的環(huán)境和水污染[2]。城市和工廠的污水處理逐漸成了公眾以及政府關(guān)注的焦點[3]。現(xiàn)階段我國大部分的鄉(xiāng)村污水處理設備較少,因而可知,大部分的鄉(xiāng)村污水得不到處理,設備和技術(shù)相對較為落后[4]。
溶解氧在污水處理中尤為重要,其關(guān)系著污水處理效果和能耗以及企業(yè)效益。在曝氣量較少溶解氧含量較低時,活性污泥的活性會降低,使污水處理的達不到排放標準,出水水質(zhì)達不到要求;而當曝氣量較高時,污泥會發(fā)生污泥膨脹,需要經(jīng)常清污,而且時間過長不經(jīng)濟,影響企業(yè)效益。對于溶解氧在污水處理過程中存在的嚴重滯后、難以確定和非線性等特點,許多學者對其做了大量的針對研究。Wahab等學者為了解決PID控制器在單一變量不能很難好的得到控制效果使用了多變量的PID控制,達到較為精確控制溶解氧的目的[5]。Bagheri等研究了中間變量對出水水質(zhì)的影響,利用RBF神經(jīng)網(wǎng)絡和多層感知器建立了固體懸浮物、化學需氧量(Chemical Oxygen Demand, COD)、總磷和氨氮的預測模型[6]。Huang等提出基于自適應網(wǎng)絡的模 糊推理系統(tǒng)(ANFLS)和主成分分析法對造紙污水處理過程進行建模,該模型考慮到COD的預測值和設定值之間的差異,可以有效地更改添加劑的劑量[7]。王欣等提出使用多輸入多輸出最小二乘SVM(LSSVM)對污水處理過程進行建模,結(jié)果表明在基于LSSVM的基礎(chǔ)上所建立的模型具有很好的運行效果[8]。這些控制方法在特定的情況下可以取得較為理想的控制效果,但是由于溶解氧的曝氣控制現(xiàn)場的時滯、非線性,其控制實現(xiàn)起來較為復雜,一般很難在主要使用PLC控制的污水處理企業(yè)中應用。而應用最廣的普通PID控制則解決不了溶解氧的時滯性和不確定性,控制效果較差。針對上述問題,為了解決在溶解氧的控制中的滯后、非線性, 本文提出一種將經(jīng)典PID控制和具有強魯棒性的模糊控制相結(jié)合的方法,可以使得該控制器在具有上述兩種控制器優(yōu)點的情況下實現(xiàn)對溶解氧的智能控制,而且系統(tǒng)較為簡潔。
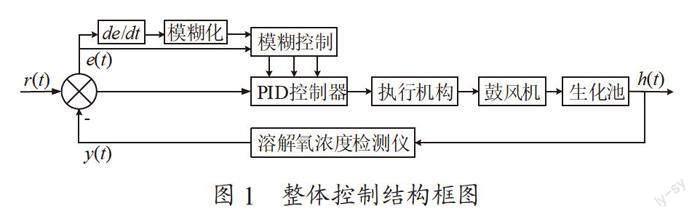
自適應模糊PID控制系統(tǒng)對溶解氧的現(xiàn)場系統(tǒng)的框圖如圖1所示,其核心是模糊控制器以及PID控制器,其中模糊控制器以在現(xiàn)場實時測得的溶解氧的值與我們預設值的誤差e和對誤差進行微分處理的ec作為輸入,PID控制器參數(shù)增量ΔKp、ΔKi、ΔKd為輸出,PID控制器的參數(shù)與模糊控制器解模糊后的精確值的輸出進行迭代,使得以模糊控制器輸出為輸入的PID控制器隨被控對象的實時狀態(tài)改變而產(chǎn)生我們所期望的相應的變化。
1? PID控制與模糊控制簡介
1.1? PID控制原理
PID控制利用反饋來檢測偏差信號,并通過偏差來對被控量進行控制。偏差信號通過按一定倍數(shù)放大(P)、取積以消除靜差(I)、取微以加快響應速度(D)的組合構(gòu)成控制量進行控制。其內(nèi)部原理圖如圖2所示。
PID控制器無法對非線性系統(tǒng)進行很好的控制,由此可見它是一種線性的控制器。PID控制器以預設yd(t)與實際輸出值y(t)構(gòu)成控制偏差:
error(t)=yd(t)-y(t)? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
PID的控制規(guī)律為:
(2)
或者寫成傳遞函數(shù)的形式:
(3)
式中,Kp為比例系數(shù);Ti為積分常數(shù);Td為微分常數(shù)。
PID控制器中的三個環(huán)節(jié)的主要作用如下:
比例環(huán)節(jié):對被控系統(tǒng)的偏差信error(t)成比例的進行放大,在偏差產(chǎn)生的時候控制器即隨即動作,比例系數(shù)越大控制器動作越大,對誤差進行減少。比例環(huán)節(jié)可以有效地減少偏差,但對靜差不能有效的消除。
積分環(huán)節(jié):積分環(huán)節(jié)可以彌補比例環(huán)節(jié)所不能清除的靜態(tài)誤差,而且還能夠提高該系統(tǒng)的無差度。當系統(tǒng)存在靜差時,積分環(huán)節(jié)會隨之作用,直到靜差被完全消除。當積分時間常數(shù)較小時,積分速度會變得更快,積分效果也隨之加強。
微分環(huán)節(jié):微分環(huán)節(jié)可以用來識別誤差的變化速度,當誤差信號的加速度過大時,系統(tǒng)容易出現(xiàn)誤差過大的情況,影響系統(tǒng)穩(wěn)定性,微分環(huán)節(jié)可以很好地解決這個問題。積分環(huán)節(jié)可以很好地彌補比例環(huán)節(jié)不能消除靜差的問題,但相應會使得系統(tǒng)的動作速度變慢,而微分環(huán)節(jié)則可以有效地解決積分環(huán)節(jié)存在的這個問題。
1.2? 模糊控制PID原理
模糊控制(Fuzzy Control)是一種可以解決控制過程中各種被控量以及對于產(chǎn)品評價不易用確定值表示的問題的有效方法。模糊控制主要是將系統(tǒng)輸入的精確值轉(zhuǎn)化為模糊值,再將模糊值用我們制定好的模糊規(guī)則表進行模糊推理,最后解模糊得到的一個精確值,我們可以用這個精確值進一步的運算作為PID控制的輸入進行控制,這樣就實現(xiàn)了PID控制的三個參數(shù)隨被控量的變化而得到了有效的調(diào)整。
該控制器用溶解氧檢測儀得到的實時值和設定值之間的誤差和誤差變化作為輸入,在模糊控制規(guī)則下對PID的三個參數(shù)進行迭代,使得PID控制器可以隨著被控量的變化隨之達到我們想要的調(diào)整,以達到想要的控制效果。該控制器的相應內(nèi)部結(jié)構(gòu)如圖3所示。
離散PID控制算法為:
(4)
2? 溶解氧濃度模糊PID控制器的設計
2.1? ?模糊控制器的設計
模糊PID控制器設計主要是圍繞著模糊控制器來進行設計,其設計流程圖如主要如圖4所示。
結(jié)構(gòu)的選擇:模糊控制器的通常結(jié)構(gòu)對應于輸入維度(1D,2D,3D)。顯而易見,當控制器的輸入越多,其起到的控制效果越好,但實際上當控制器的輸入越多控制起來會非常復雜,起不到很好的控制效果。為了實現(xiàn)控制系統(tǒng)的簡潔和精度的統(tǒng)一,我們可以采用雙輸入的模糊控制器,其兩個輸入是溶解氧濃度的預設值和現(xiàn)場實時值之間的誤差e和誤差的微分ec,而被控對象的狀態(tài)可以由這兩個參數(shù)很好地表現(xiàn)出來。
確定模糊控制器變量:溶解氧濃度控制的實現(xiàn)主要是用現(xiàn)場測得的溶解氧濃度大小對鼓風機實行控制,模糊PID控制器的控制目標是溶解氧濃度,將檢測儀器測得的實時溶解氧濃度與期望值相比可以得到誤差e和誤差加速度ec,這樣我們就得到了控制器的輸入;為了達到對PID參數(shù)的自適應智能控制,模糊控制器以Kp,Ki,Kd的修正量ΔKp,ΔKi,ΔKd為輸出。
輸入變量的模糊化:由于現(xiàn)場測得的數(shù)據(jù)是實際的數(shù)字,對其處理后當然也是精確的數(shù)字,但是模糊控制器的模糊控制需要的輸入是模糊值才能根據(jù)模糊規(guī)則進行模糊推理,因此我們需要把模糊控制器的輸入轉(zhuǎn)換為模糊值。基本論域內(nèi)的量是精確值,模糊論域內(nèi)的量都是模糊值。因此我們不難得出基本論域是整個系統(tǒng)的輸入輸出,而模糊論域僅僅是模糊控制器的輸入輸出。模糊集合是將基本論域轉(zhuǎn)化為模糊控制器的模糊論域所得到的。模糊論域和模糊集合可由一個隸屬函數(shù)所定義。
在曝氣生物濾池的控制現(xiàn)場,我們所測得的誤差e一般在(-0.6,0.6)之間,乘以量化因子10后得到其模糊集論域為(-6,6),所以我們得到e和ec的模糊集論域為(-6,6)。輸出量乘以比例因子10可以得到其論域也為(-6,6)。
輸入變量的模糊論域為(-6,6)。將輸入變量e、ec范圍劃分為7個模糊子集:{NB,NM,NS,ZO,PS,PM,PB},將偏差e和偏差變化率ec量化到(-6,6)的區(qū)域內(nèi)。
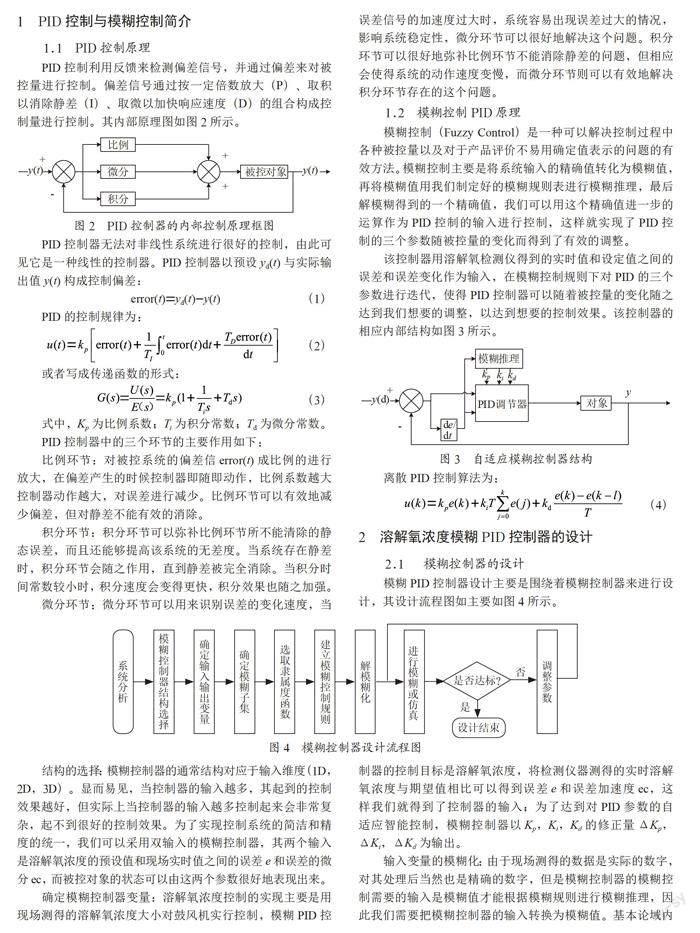
為了實現(xiàn)精確量到模糊量,我們需要定義一個隸屬度函數(shù)。常用的描述確定量隸屬于模糊語言變量程度的隸屬度函數(shù)一般有高斯形、三角形、S形等。本文根據(jù)曝氣生物濾池現(xiàn)場的需要,采用高斯形隸屬度函數(shù)對其進行模糊化。其中PID的三個參數(shù)Kp,Ki,Kd的模糊化過程如圖5所示。
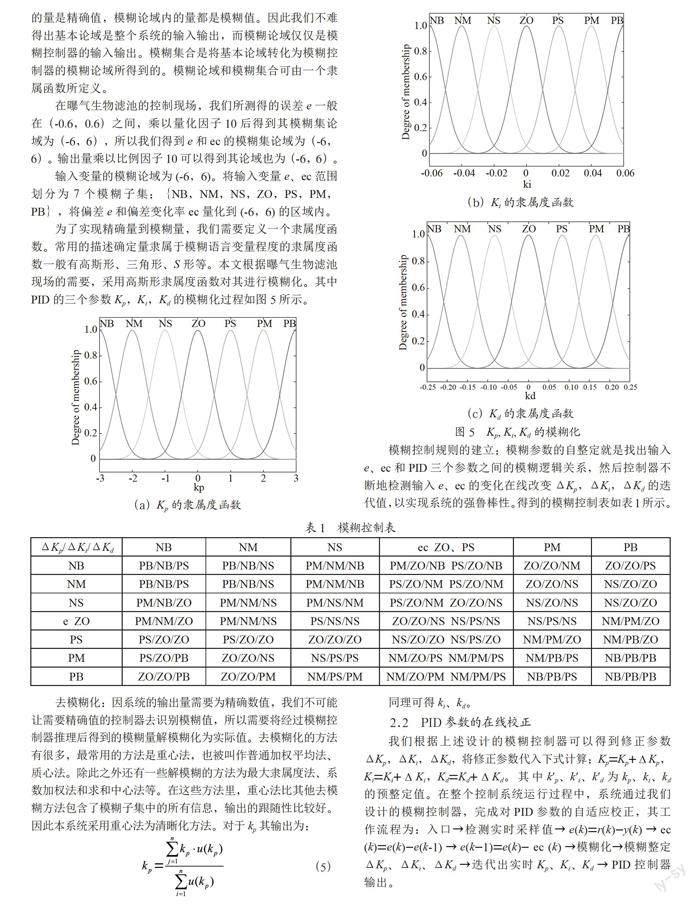
模糊控制規(guī)則的建立:模糊參數(shù)的自整定就是找出輸入e、ec和PID三個參數(shù)之間的模糊邏輯關(guān)系,然后控制器不斷地檢測輸入e、ec的變化在線改變ΔKp,ΔKi,ΔKd的迭代值,以實現(xiàn)系統(tǒng)的強魯棒性。得到的模糊控制表如表1所示。
去模糊化:因系統(tǒng)的輸出量需要為精確數(shù)值,我們不可能讓需要精確值的控制器去識別模糊值,所以需要將經(jīng)過模糊控制器推理后得到的模糊量解模糊化為實際值。去模糊化的方法有很多,最常用的方法是重心法,也被叫作普通加權(quán)平均法、質(zhì)心法。除此之外還有一些解模糊的方法為最大隸屬度法、系數(shù)加權(quán)法和求和中心法等。在這些方法里,重心法比其他去模糊方法包含了模糊子集中的所有信息,輸出的跟隨性比較好。因此本系統(tǒng)采用重心法為清晰化方法。對于kp其輸出為:
(5)
同理可得ki、kd。
2.2? PID參數(shù)的在線校正
我們根據(jù)上述設計的模糊控制器可以得到修正參數(shù)ΔKp,ΔKi,ΔKd,將修正參數(shù)代入下式計算:Kp=Kp+?Kp,Ki=Ki+?Ki,Kd=Kd+?Kd。其中k′p、k′i、k′d為kp、ki、kd的預整定值。在整個控制系統(tǒng)運行過程中,系統(tǒng)通過我們設計的模糊控制器,完成對PID參數(shù)的自適應校正,其工作流程為:入口→檢測實時采樣值→e(k)=r(k)-y(k)→ec (k)=e(k)-e(k-1)→e(k-1)=e(k)- ec (k)→模糊化→模糊整定ΔKp、ΔKi、ΔKd→迭代出實時Kp、Ki、Kd→PID控制器輸出。
3? 溶解氧濃度模糊PID控制的仿真
3.1? 被控對象的建模
在實際測量時,溶解氧的控制模型需要合理地進行適當簡化,根據(jù)經(jīng)驗其模型的傳遞函數(shù)為:
(6)
其中,kc為放大倍數(shù)也就是穩(wěn)態(tài)增益,To為該模型的預計時間常數(shù),τ為對溶解氧模型滯后時間的合理預估。
根據(jù)現(xiàn)場經(jīng)驗,我們可以先得到一個估計值,然后通過MATLAB系統(tǒng)工具箱進行該系統(tǒng)的參數(shù)辨識。兩者結(jié)合,可以得到kc為7.812 5,To為72 s,合理的τ為10 s,由此可以得出溶解氧的系統(tǒng)傳遞函數(shù)為:
(7)
3.2? ?控制仿真
利用MATLAB搭建了模糊自適應PID控制[9],如圖6所示。
其中模糊控制器結(jié)構(gòu)如圖7所示。
仿真結(jié)果如圖8所示。
從圖8仿真結(jié)果可見,采用本文設計的智能PID控制器在進行控制時,系統(tǒng)在t=80 s時就已經(jīng)穩(wěn)定在2.5 mg/L,而這正是我們所希望的。但是傳統(tǒng)PID控制器在控制時,系統(tǒng)長達200多秒才開始穩(wěn)定。通過以上對比我們可以得出,相對于普通PID控制,在使用模糊自適應PID控制器時,整個自適應系統(tǒng)可以很好地穩(wěn)定,而且可以快速追蹤,幾乎沒有震蕩,達到既快速又穩(wěn)定的效果。其中我們可以看到該控制器最為優(yōu)異的特點就是快速達到了期望值,普通的PID控制實現(xiàn)這樣的控制效果是非常困難的[10]。
4? 結(jié)? 論
面對溶解氧控制在廢水處理過程中的非線性、大滯后和不確定性,本文對其進行了研究。考慮到對曝氣生物濾池系統(tǒng)溶解氧控制存在的上述問題和溶解氧控制的重要性,設計了一個模糊控制與PID控制相結(jié)合的智能控制器,實現(xiàn)了結(jié)構(gòu)較為簡單和精度相對較高的動態(tài)統(tǒng)一。通過模擬出來的結(jié)果可以看出,該系統(tǒng)同時具備模糊控制魯棒性好和PID控制優(yōu)穩(wěn)定性的優(yōu)點,出水水質(zhì)好,能耗也有一定的降低。智能溶解氧控制系統(tǒng)可以提高污水處理企業(yè)的經(jīng)濟效益,在邊際條件下可以實現(xiàn)比較穩(wěn)定的污水出水質(zhì)量。對于政府所倡導的節(jié)能減排和環(huán)保保護具有一定的意義。
參考文獻:
[1] ANSARI A A,GILL S S. Eutrophication:Causes,consequences and control [M].The Netherlands:Springer,2011.
[2] 喬俊飛,盧超,王磊,等.城市污水處理過程模型研究綜述 [J].信息與控制,2018,47(2):129-139.
[3] 賀瑞軍.城市污水處理的現(xiàn)狀及展望 [J].科技情報開發(fā)與經(jīng)濟,2006,16(24):181-182.
[4] 劉韜.污水處理智能控制的發(fā)展現(xiàn)狀研究 [J].中國高新技術(shù)企業(yè),2009(17):121-122.
[5] WAHAB N A,KATEBI R,BALFERUD J. Multivariable PID control design for activated sludge process with nitrification and denitrification [J].Biochemical Engineering Journal,2009,45(3):239-248.
[6] BAGHERI M,MIRBAGHERI S A,EHTESHAMI M,et al. Modeling of a sequencing batch reactor treating municipal wastewater using multi-layer perceptron and radial basis function artificial neural networks [J].Process Safety and Environmental Protection,2015,93:111-123.
[7] HUANG M,MA Y,WAN J,et al. Modeling a paper-making wastewater treatment process by means of an adaptive network-based fuzzy inference system and principal component analysis [J].Industrial & engineering chemistry research,2012,51(17):6166-6174.
[8] 王欣,宋翼頡,秦斌,等.基于LSSVM的污水處理過程建模 [J].湖南工業(yè)大學學報,2016,30(1):59-63.
[9] 龐中華.系統(tǒng)辨識與自適應控制MATLAB仿真:修訂版 [M].北京:北京航空航天大學出版社,2009.
[10] 付娟.污水處理過程中溶解氧濃度控制策略研究 [D].蘭州:蘭州理工大學,2017.
作者簡介:張陳(1997—),男,漢族,安徽宿州人,碩士研究生在讀,研究方向:智能控制。
收稿日期:2022-08-29
