基于深度學(xué)習(xí)的智能導(dǎo)盲犬的研究與設(shè)計
2023-06-18 06:12:39楊友晨彭萬新陶興發(fā)胡偉
客聯(lián) 2023年2期
關(guān)鍵詞:安全
楊友晨 彭萬新 陶興發(fā) 胡偉

摘 要:近年來,機器人已逐漸融入人們的工作和生活。智能導(dǎo)盲犬是基于智能機器人技術(shù)開發(fā)研究的一種符合社會需求的社會服務(wù)型機器人,其設(shè)計融合了激光測距、智能避障、智能語音導(dǎo)航和深度學(xué)習(xí)等智能化手段。同時在功能方面,智能導(dǎo)盲犬將多種智能手段相結(jié)合,不僅操作方便還具有很高的安全性,在一定程度上滿足了消費群體的需要。
關(guān)鍵詞:智能導(dǎo)盲犬;視障人群;導(dǎo)航;避障;安全
隨著科技不斷發(fā)展,智能化不斷普及,高新科技的發(fā)展需要關(guān)注弱勢群體,尤其是視障人群。中國殘疾人聯(lián)合會統(tǒng)計中國有一千多萬盲人,且逐年以一定的速度遞增。視障人士的出行面對的是重重的困難,除了缺失視覺識別道路信息的能力之外,還存在不符合規(guī)范的盲道、無法預(yù)知的突發(fā)危險等一系列的困難。盲人面臨著的惡劣的出行環(huán)境,極大程度地限制了盲人的正常出行生活。
根據(jù)中國盲人協(xié)會的統(tǒng)計數(shù)據(jù)顯示,我國有一千多萬盲人,是世界盲人最多的國家,但只有數(shù)百條導(dǎo)盲犬,遠遠不夠使用。開發(fā)智能導(dǎo)盲犬可以極大程度緩解現(xiàn)有導(dǎo)盲犬的壓力。導(dǎo)盲犬系統(tǒng)中最重要的工作是導(dǎo)盲,系統(tǒng)需要實現(xiàn)的是引導(dǎo)視障人群正常出行,避開出行路線范圍內(nèi)的障礙物。因此,設(shè)計出能夠精準(zhǔn)快速識別出障礙物的智能導(dǎo)盲犬系統(tǒng),具有很好的現(xiàn)實意義的。
一、系統(tǒng)結(jié)構(gòu)
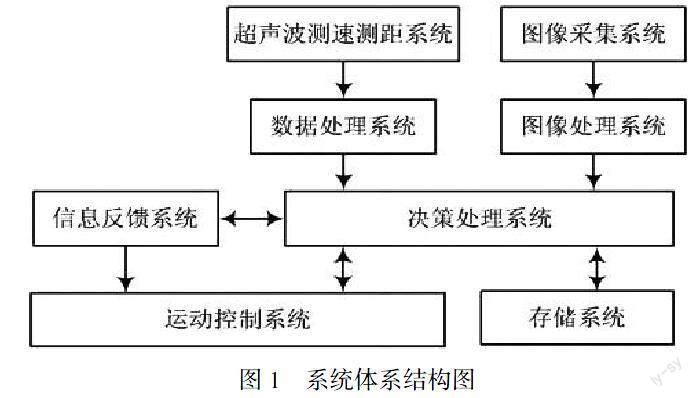
本設(shè)計系統(tǒng)通過數(shù)據(jù)采集、處理、存儲、反饋等子系統(tǒng)構(gòu)架而成。首先由兩路信息采集系統(tǒng)——超聲波測速測距系統(tǒng)及圖像采集系統(tǒng)采集外部環(huán)境信息,經(jīng)決策處理系統(tǒng)對信息進行處理,并進行多模塊輸出,其中有信息的反饋系統(tǒng)可以面向使用者提供足夠的信息提示,同時,又可通過運動系統(tǒng)對“導(dǎo)盲犬”進行實時控制。存儲系統(tǒng)可以將采集和處理的環(huán)境信息進行存取,方便查詢。圖1為系統(tǒng)的體系結(jié)構(gòu)圖。
(一)硬件設(shè)計結(jié)構(gòu)
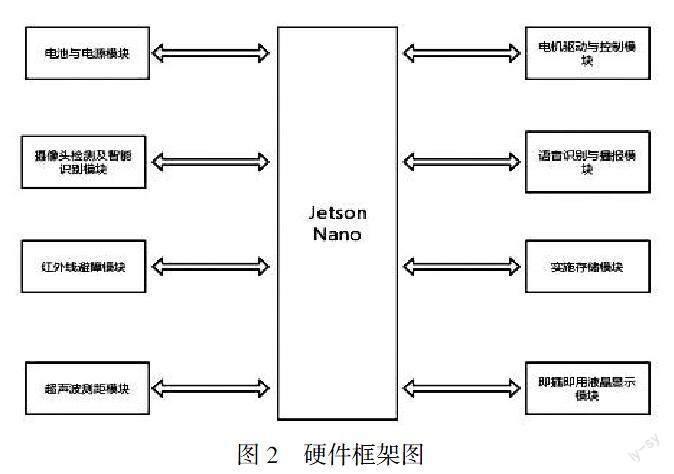
采用英偉達的Jetson Nano作為主控,將主控板、蓄電池、供電電路、攝像頭監(jiān)測及智能識別模塊、紅外線避障模塊、超聲波測速與測距模塊、電機驅(qū)動與控制模塊、語音識別與播報模塊、實時存儲模塊、即插即用液晶顯示模塊一同安裝在機器人上,構(gòu)成整個硬件系統(tǒng)。
(二)軟件設(shè)計結(jié)構(gòu)
軟件系統(tǒng)決定了系統(tǒng)的功能實現(xiàn)和人機交互的舒適性、便利性。在Ubuntu操作系統(tǒng)的基礎(chǔ)上設(shè)計超聲波測距模塊、語音識別與播報模塊、紅外線避障模塊和電機控制模塊的驅(qū)動程序,使得模塊控制實現(xiàn)更為便利。
1.超聲波測距模塊。超聲波測距模塊,通過發(fā)送一定頻率的聲音,計算返回的時間,根據(jù)聲速公式,可以精確的測量出盲人和前方障礙物的距離,如果距離低于設(shè)定的閥值智能導(dǎo)盲犬便會發(fā)出警報提醒盲人停下來。空氣中的溫度、濕度以及超聲波傳播的速度,超聲波測距的時間都可能會引起超聲波測距的誤差而超聲波的傳播速度影響最大,所以我們想到了使用可以補償溫度的傳感器測距,通過高精度的溫度傳感器實時檢測外界溫度的變化,進而可以更好的提高超聲波測距的精準(zhǔn)度[1]。圖3為超聲波測距基本組成圖。
2.語音識別與播報模塊。語音識別和播報任務(wù)的作用是識別語音指令,如語音指令啟動、去往哪個地點等,語音播報任務(wù)負(fù)責(zé)播報前方障礙物、路面情況,如前方路面坑洼,左側(cè)有障礙物等。
3.紅外線避障模塊。紅外線避障模塊主要利用微處理器來產(chǎn)生一定頻率的光信號,并用高頻率的方波對紅外線發(fā)射管進行調(diào)制發(fā)射,當(dāng)發(fā)射出去的紅外線光信號遇到障礙物反射回來時,紅外線接收管便開始對反射會的光信號進行解調(diào),輸出相應(yīng)的高或者低電平。利用紅外線的優(yōu)點是外界對紅外光信號的干擾相比于其他信號比較小,并且易于實現(xiàn),紅外發(fā)射接收管的價格也比較合理,紅外線避障系統(tǒng)是智能導(dǎo)盲犬的“眼睛”,其性能的好壞和抗干擾能力的強弱以及過濾其他信號的能力,決定了紅外避障精準(zhǔn)性和多變性[2]。
4.圖像采集模塊。利用的地貌比對是對被檢測到的環(huán)境特征在環(huán)境圖像庫中進行目標(biāo)搜索以及進行地點的確認(rèn)。實際上,將采樣到的環(huán)境圖像與庫存的圖像依次進行比對,并找出最佳的匹配對象。所以,環(huán)境的描述決定了環(huán)境識別的具體方法與性能。該應(yīng)用的核心是“圖形識別算法”,這種算法是利用了環(huán)境中的各主要特點及一些特征部分而形成的方法[3]。
5.電機控制模塊。智能導(dǎo)盲犬的設(shè)計中采用的是直流電源,因此用到的電機也為直流電機,控制智能導(dǎo)盲犬自由運動的是四個可以雙向轉(zhuǎn)動的直流電機,并且給超聲波避障測距系統(tǒng)的執(zhí)行和紅外線的測量提供動力系統(tǒng)。通過試驗,然后按照事先編輯好的程序微處理器的參數(shù)進行整定執(zhí)行,由微處理器輸出控制兩個電機的相互協(xié)調(diào)轉(zhuǎn)向,進而可以實現(xiàn)智能導(dǎo)盲犬的自主運動及循跡避障。超聲波測距線路用于測量智能導(dǎo)盲犬距離障礙物的遠近,反饋電路輸出控制剎車系統(tǒng)可控制預(yù)先設(shè)定的編程代碼[4]。
二、技術(shù)路線
首先將ubuntu系統(tǒng)移植到Jetson Nano中,進行系統(tǒng)初始化及基本信息存儲。然后在Ubuntu中建立一個開始任務(wù),再在開始任務(wù)中創(chuàng)建六個任務(wù),分別是超聲波測距任務(wù)、語音識別與播報任務(wù)、紅外線避障任務(wù)、圖像采集任務(wù)、電機控制任務(wù)和GSM無線任務(wù)。超聲波測距任務(wù)負(fù)責(zé)探測周圍的障礙物情況;語音識別和播報任務(wù)負(fù)責(zé)識別語音指令,如左轉(zhuǎn)、右轉(zhuǎn)、前進、后退等,以及播報當(dāng)前的障礙物和路面情況;紅外線避障任務(wù)負(fù)責(zé)探測路面坑洼情況,并通過信號量傳遞給其他任務(wù);圖像采集任務(wù)負(fù)責(zé)確認(rèn)當(dāng)前所處的環(huán)境情況;電機控制任務(wù)負(fù)責(zé)根據(jù)路面情況和指令控制電機的行走路徑和轉(zhuǎn)動方向;GSM無線任務(wù)負(fù)責(zé)將盲人所說的話快捷地發(fā)送出去,或者在盲人遇到特殊情況時將情況描述并自動發(fā)送給其家人。系統(tǒng)會將從這些任務(wù)得到的信息進行綜合分析,然后發(fā)布到下一節(jié)點去實現(xiàn)控制。系統(tǒng)還會收集反饋信息進行處理,再返回信息綜合分析實現(xiàn)閉環(huán)處理[5]。圖4為技術(shù)路線流程圖。
為了滿足生活中的各種復(fù)雜場景,還需進行深度學(xué)習(xí),使得各種功能識別準(zhǔn)確率更高。通過使用導(dǎo)盲犬的仿目攝像頭采集大量實際場景中的圖片進行處理與分類數(shù)據(jù)集,如將轎車、卡車、行人與騎行者歸類為car類。對采集到的圖片使用yolo_mark標(biāo)注工具進行標(biāo)注,并隨機抽取80%的數(shù)據(jù)集作為訓(xùn)練集,其余20%用于測試。訓(xùn)練模型方面采用yolov3模型,訓(xùn)練前需設(shè)置訓(xùn)練參數(shù),在確定訓(xùn)練參數(shù)后對YOLOv3進行訓(xùn)練。訓(xùn)練次數(shù)設(shè)置為50000次,學(xué)習(xí)率在35000次后下降到0.0001,在45000次后下降到0.00001,使損失函數(shù)進一步收斂。同時利用旋轉(zhuǎn)、調(diào)整飽和度和色調(diào)等方法對數(shù)據(jù)集中的圖像進行增強和擴充,以增強模型的魯棒性。
三、結(jié)論
智能導(dǎo)盲犬運用了攝像頭檢測及智能識別技術(shù)、紅外線避障技術(shù)、超聲波測距技術(shù)、電機驅(qū)動與控制技術(shù)、語音識別技術(shù)等先進技術(shù)手段,具有行進中的障礙物檢測、識別與定位,其中包括移動的物體與靜止的物體識別;測定障礙物的速度與距離;對周圍路線的特定環(huán)境標(biāo)志進行環(huán)境辨認(rèn)等功能,在引領(lǐng)視力殘疾人方面有杰出的表現(xiàn)。它可以彌補導(dǎo)盲犬?dāng)?shù)量嚴(yán)重不足的缺點,能夠代替導(dǎo)盲犬在日常生活中為視力殘疾人提供幫助。
參考文獻:
[1]王力程,陳銳,韓旭,蘇龍霞.基于超聲波測距原理的電子導(dǎo)盲車設(shè)計[J].電子技術(shù)與軟件工程,2018,No.140(18):98-99.
[2]趙海蘭.基于單片機的紅外遙控智能小車的設(shè)計[J].無線互聯(lián)科技,2011,No.7(03):36-38.
[3]黃大志,申屠留芳,郭燕.導(dǎo)盲機器人中超聲波測距系統(tǒng)的研究[J].淮海工學(xué)院學(xué)報(自然科學(xué)版),2009,v.18;No.72(01):19-22.
[4]楊東燕.一種移動機器人小車的電機控制系統(tǒng)[J].內(nèi)蒙古科技與經(jīng)濟,2008,No.174(20):99-100+108.
[5]王廣權(quán),石玲,王建文等.基于機器學(xué)習(xí)的智能導(dǎo)盲犬設(shè)計[J].電子測試,2022,36(24):35-37.DOI:10.16520/j.cnki.1000-8519.2022.24.006.
猜你喜歡
中國科技博覽(2016年18期)2016-10-19 09:59:34
科技視界(2016年21期)2016-10-17 20:00:16
科技視界(2016年20期)2016-09-29 11:59:36
科技視界(2016年20期)2016-09-29 10:54:27